基于循環卷積生成對抗網絡的風機齒輪箱故障診斷
2024-03-04 02:33:58趙承利鐘麥英
山東科技大學學報(自然科學版) 2024年1期
趙承利,張 璐,鐘麥英
(山東科技大學 電氣與自動化工程學院,山東 青島 266590)
風機齒輪箱作為風力渦輪傳動系統的核心裝置,常用于動力傳動,承受不規則的機械應力。由于此類零部件長時間工作在高溫、高速、高負荷等惡劣工況下,極易發生故障,造成財產損失甚至引起災難性事故。因此,研究齒輪箱的故障診斷方法至關重要[1]。針對齒輪箱的故障診斷研究主要集中于運動學機理模型和數據驅動兩方面。由于傳感器技術的高速發展,數據收集量指數式增長,數據驅動的故障診斷方法得到更廣泛的應用,主要包括隨機森林、人工神經網絡、深度學習等方法[2]。文獻[3]提出一種基于隨機森林的旋轉機械齒輪組故障診斷方法;文獻[4]提出一種基于圖的半監督學習隨機森林算法,實現對旋轉機械齒輪箱的故障診斷;文獻[5]利用改進的經驗模態分解與人工神經網絡相結合,實現對電機轉子軸承的故障診斷。深度學習方法相較于其他方法具有更深的特征學習結構,所需數據量更多,能更有效地描述復雜模型。文獻[6]提出一種多尺度卷積核動態融合方法來提取齒輪箱故障信號特征,并結合全局稀疏網絡實現對齒輪箱的故障診斷。以上方法雖表現良好,但都基于足夠多的故障樣本,而實際應用中,齒輪箱常因故障樣本不足導致總體樣本不平衡,很大程度上影響傳統故障診斷方法的準確性[7]。
近年來,以生成對抗網絡(generative adversarial network,GAN)為代表的數據增強方法為解決樣本不平衡問題提供了新思路。GAN是Goodfellow于2014年提出的一種對抗生成模型新框架[8],隨著對抗機制的不斷完善,GAN也在圖像生成、語義分割等領域有著廣泛應用,并衍生出不同功能的變體[9]。條件生成對抗網絡[10]在原始GAN無監督的基礎上加入條件信息,能更有效地捕捉原始數據分布。針對于原始GAN訓練不穩定、梯度爆炸、梯度消失等問題,Wasserstein生成對抗網絡(Wasserstein GAN,WGAN)[11]和帶有梯度懲罰的WGAN(WGAN with gradient penalty,WGAN-GP)[12]相繼提出。這些方法已經在圖像生成方面取得了良好的效果,而GAN在一維數據增強方面應用較少。2017年,GAN開始用于故障診斷領域。Lee等[13]利用GAN解決異步電機中數據樣本不平衡問題;文獻[14]提出改進輔助分類生成對抗網絡用于風機齒輪箱故障數據的生成;文獻[15]提出一種新的條件輔助分類器GAN框架,結合模型不可知元學習實現軸承故障診斷。
上述方法雖然表現良好,但對于一維時序信號進行特征提取時,并未針對性地考慮到時域數據內在關系和時間方向上的深度聯系,因此本研究提出一種帶有梯度懲罰的Wasserstein循環卷積生成對抗網絡(Wasserstein recurrent convolutional GAN-GP,WRCGAN-GP)診斷方法。首先,利用卷積網絡數據降維和循環網絡提取時間信息,生成具有周期性變化的時間序列信號;然后,以隨機噪聲作為輸入,通過對抗機制不斷學習少數類故障樣本特征,生成與真實數據相似的平衡數據集;最后,將平衡數據集輸入到堆疊去噪自編碼器(stacked denoising autoencoder,SDAE)[16]模型實現風機齒輪箱故障診斷。
1 生成對抗網絡
GAN主要包含生成器和判別器兩部分,結構如圖1所示。其中,生成器用于捕捉真實樣本分布,生成新樣本;判別器用于分辨輸入樣本來自真實樣本還是生成樣本。GAN損失函數定義為:
(1)
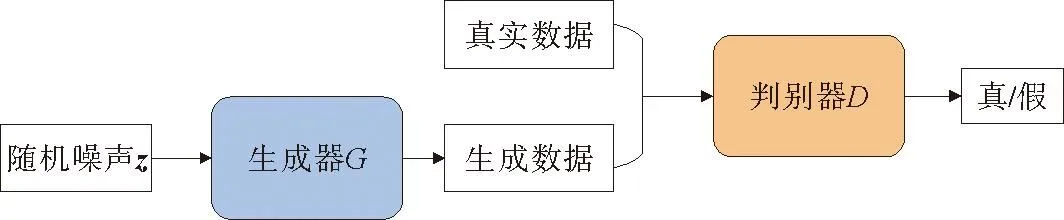
圖1 GAN結構圖
式中:x為服從Pdata分布的真實數據,Ex~Pdata為x的期望;z為服從Pz分布的隨機噪聲,Ez~Pz為z的期望;D(x)為判別器D的輸出;G(z)為生成器G的輸出。在訓練過程中,G的目標是最小化真實數據與生成數據之間的誤差,以求最大程度學習真實數據的分布;D的目標是最大化真實數據與生成數據之間的差距以區分彼此。當訓練達到納什平衡時,G可以生成與真實數據分布相似的數據。
實驗表明,訓練中若生成器與判別器能力平衡,模型更易收斂,因此在訓練模型時,應首先優化判別器,而后優化生成器。但判別器過強,生成器也不能有效更新參數,容易出現梯度消失、梯度爆炸等問題。雖然GAN已經在圖像生成方面有著不錯的表現,但對一維數據特征捕捉、數據增強方面仍有一定局限性。
2 基于循環卷積生成對抗網絡的故障診斷
為了更好地解決風機齒輪箱樣本不平衡問題,設計了基于循環卷積生成對抗網絡的故障診斷方法,主要分為樣本生成模型構建和故障分類方法設計兩階段,如圖2所示。其中,WRCGAN-GP用來生成少數類故障樣本以平衡數據集,再利用SDAE對平衡數據集進行故障分類。
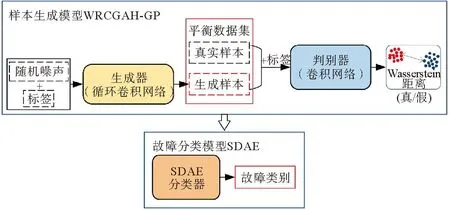
圖2 基于WRCGAN-GP的故障診斷方法架構
2.1 樣本生成模型構建
針對故障樣本數量不足的問題,設計了WRCGAN-GP樣本生成模型,該模型包含生成器G和判別器D兩部分,其結構如圖3所示。G采用循環卷積網絡結構,卷積模塊由兩層卷積和兩層池化交替組成,循環模塊采用長短期記憶網絡(long short-term memory,LSTM)單元結構,其卷積輸出作為循環網絡的輸入。G的輸入為(zT,cT)。其中,z為隨機噪聲,維度為100×1;c為樣本標簽,維度為m×1,m為樣本類別數。G的輸出為xg,維度為n×1,G中第i層卷積運算的輸出為oi:
(2)
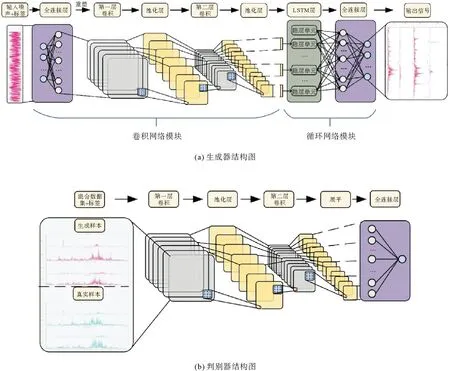
圖3 WRCGAN-GP結構圖
(3)
式中:fc為卷積層激活函數;M為輸入特征圖矩陣;oi-1為i-1層輸出;ki和ai分別為第i層的卷積核與偏置。通常卷積塊的激活函數選用ReLu函數,如式(3)所示,該激活函數在輸入值大于零的部分導數值恒定,能在權值更新時克服梯度消失問題,并可以有效驅使網絡逼近全局最優。
經過卷積運算得到信號特征,并重塑為符合循環模塊輸入的形狀,表示為R=[r1,r2,…,rt],rt的維度為ξ×1,t∈{1,2,…,ω}。循環模塊中LSTM單元結構圖4所示,t時刻運算如下:
(4)
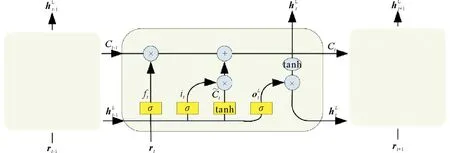
圖4 LSTM結構圖
(5)
(6)
(7)

(8)
輸出門用來計算隱藏層的輸出,計算式為:
(9)


WRCGAN-GP是在WGAN-GP的基礎上進行架構改進,通過最小化損失函數L(d)和L(g)進行對抗訓練,交替更新參數,其損失函數為:
(10)
L(g)=-Exg~Pg[D(xg,c)]。
(11)


2.2 故障分類
堆疊去噪自編碼器近年來因其優異的性能被廣泛用于故障診斷領域,其結構見圖5。將平衡數據集B作為SDAE的輸入實現齒輪箱故障分類。SDAE由數個去噪自編碼器(denoising autoencoder,DAE)模塊堆疊而成,其基礎模塊DAE是一種通過特征提取并最小化重構誤差來擬合樣本的單隱層神經網絡,主要由輸入層、隱藏層及輸出層三部分構成。輸入層與隱藏層構成編碼器fs,隱藏層與輸出層構成解碼器gs,結構如圖6所示。
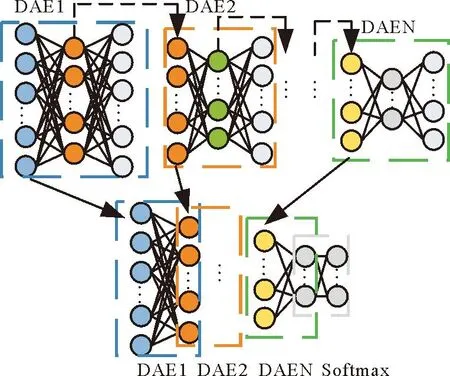
圖5 SDAE結構圖.
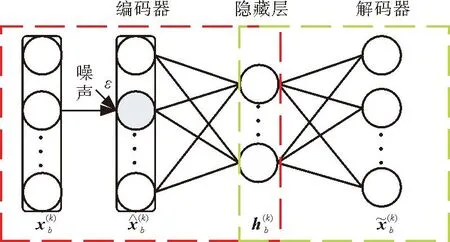
圖6 DAE結構圖
(12)

(13)
式中:W′為輸出權重矩陣,b′為輸出偏置向量。最后通過最小化重構誤差優化自編碼器:
(14)

(15)

3 實驗分析
3.1 數據集介紹
本研究采用的數據集來自山東科技大學電氣與自動化工程學院實驗室風力渦輪傳動系統故障診斷模擬器,平臺結構如圖7所示,傳感器主要有振動傳感器、扭力傳感器以及壓力傳感器等。負載工作電壓分別有8、5 V,電機工作頻率有6、10、14 Hz。以上裝置中所涉及到的硬件,如齒輪等,均可被替換成故障型齒輪以輸入故障,故障形態有缺齒、斷齒、齒裂以及磨損等。
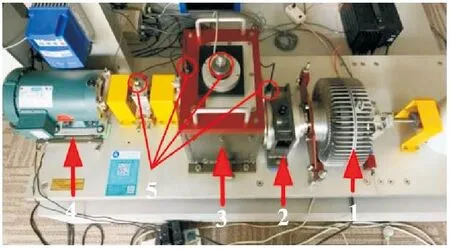
1—負載制動器;2—行星軸齒輪箱;3—平行軸齒輪箱;4—動力裝置;5—傳感器
實驗負載工作電壓8 V、電機工作頻率6 Hz,信號取自振動傳感器,共有5種信號類型,分別為正常信號、缺齒信號、斷齒信號、齒裂信號和表面磨損信號,原始信號樣本維度為2 048×1。為了凸顯每種樣本類型的信號特點,首先進行快速傅里葉變換,截取樣本前半段作為最終使用樣本,維度為1 024×1,共選取數據樣本980個,各類型樣本數量及標簽設置如表1所示。WRCGAN-GP生成的各類故障樣本數量為原始數據集中正常樣本與故障樣本數量的差值,即380個,以達到平衡數據集的目的。

表1 樣本及標簽設置
3.2 結果與分析
模型訓練需設置若干超參數值,損失函數中λ取10,優化器選擇為Adam,學習率設置為0.000 5。為使多層之間協調更新,訓練更易收斂,每一層后跟隨批量歸一化層,且訓練時每訓練1次生成器更新5次判別器,迭代次數為500。WRCGAN-GP與SDAE具體網絡結構設置如表2、表3所示。將訓練集數據輸入到WRCGAN-GP中訓練并得到生成樣本,其損失函數隨迭代次數的變化情況如圖8所示。可以看出,生成器損失與判別器損失在訓練初期波動較大,但隨著迭代次數的增加,損失值在迭代200次附近時趨于平穩。

表2 WRCGAN-GP網絡架構

表3 SDAE網絡架構
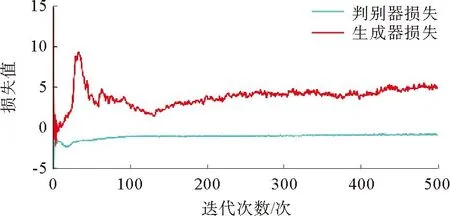
圖8 損失值變化情況
圖9為4種故障類型真實樣本與生成樣本的對比圖,可以看出,雖然生成樣本與真實樣本并不完全相同,在某些峰值處存在小的偏差,但分布趨勢基本一致,可以作為原始數據擴展集。
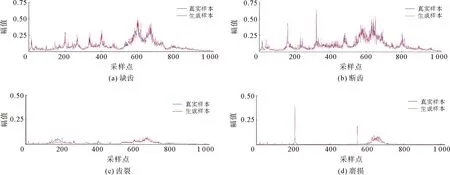
圖9 樣本對比圖
t分布隨機近鄰嵌入算法[18]可以更直觀地觀察到原始樣本與生成樣本分布相似情況,該算法可將高維數據映射到低維空間,以此分析數據在高維空間的分布。相似程度較高的樣本相互聚集,反之相互排斥,增強前后樣本數據可視化結果如圖10所示。由圖10可以看出,數據增強后各類樣本的聚類效果更加明顯。

圖10 增強數據前后可視化結果對比
針對不平衡數據集,通常采用以下指標進行樣本質量評價:Gmean[19]、F1[20]、ROC曲線以及AUC值[21]。Gmean為正類準確率與負類準確率的綜合指標,可表示為:
(16)
式中:TP為正類預測為正類的比例,即正類準確率;TN為負類預測為負類的比例,即負類準確率;FN為正類預測為負類的比例;FP為負類預測為正類的比例。
F1相較于Gmean更加注重少數類分類性能的評價,其計算式為:
(17)
ROC是以假正率(FPR)為x軸和真正率(TPR)為y軸構成的曲線,曲線下方圍成的面積即為AUC值,其值越接近于1,分類準確率越高。其中,
(18)
為進一步說明WRCGAN-GP的優越性,設置消融實驗進行對比驗證。方法1:加入標簽信息的梯度懲罰Wasserstein卷積生成對抗網絡(Wasserstein convolutional GAN-GP,WCGAN-GP),即去掉WRCGAN-GP生成器中的LSTM結構。方法2:不加入標簽信息的WGAN-GP(WGAN-GP),即去掉WCGAN-GP中的標簽信息。方法3:加入標簽信息的WGAN,即去掉WCGAN-GP損失函數中的梯度懲罰項。另外,將所設計的故障診斷方法與卷積神經網絡(convolutional neural network,CNN)[22],隨機森林(random forest,RF)[4]進行對比。
根據不同方法的故障診斷結果,計算評價指標,結果如表4所示。首先,針對三種生成算法的生成樣本,均利用SDAE分類器進行故障分類。由表4可以看出,在正常樣本量與故障樣本量之比為20∶1的極不平衡情況下,WGAN-GP-SDAE中由于沒有標簽信息約束,訓練不穩定,F1與AUC值均較低,Gmean甚至出現0值情況;WGAN-SDAE本身訓練不穩定,即使有標簽信息約束,但指標仍低于WCGAN-GP-SDAE與WRCGAN-GP-SDAE;而本研究提出的方法在保證訓練穩定的前提下,引入標簽信息約束,且加入LSTM結構以讀取數據潛藏的故障信息,相較于單一卷積結構的WCGAN-GP-SDAE,其三項指標值均有所提高。其次,將原始不平衡數據集作為CNN與RF的輸入,由于原始數據集中故障樣本量極少,CNN不能發揮有效性,Gmean出現0值,F1也僅有27.16%;RF由于多棵樹結構優勢,Gmean和F1較CNN有所提升,但仍低于WRCGAN-GP-SDAE。從圖11 ROC曲線也可以看出,WRCGAN-GP-SDAE曲線距離坐標軸左上角更近,曲線下方圍成的面積也更接近于1,生成樣本也更符合真實樣本分布。

表4 評價指標對比

圖11 ROC曲線結果對比
為了更詳細地展示生成樣本質量,將故障分類準確率匯總如表5所示。由表5可以看出,WGAN-SDAE僅有缺齒和磨損分類效果良好,對于另外幾種特征較為相似的故障類別不能實現有效分類;WGAN-GP-SDAE結構上無改變,且缺少標簽信息的約束,故障分類也僅有正常和磨損正確率在95%以上;在WCGAN-GP-SDAE中,缺齒有14%被誤分類,斷齒有5%被誤分類,可見對于極為相似、難以分辨的故障樣本,單一卷積結構不能完整有效地獲得故障信息并進行準確分類;由于原始數據集的不平衡特性,CNN僅能對正常和磨損樣本準確分類;RF分類準確率較CNN有所提升,但對于缺齒仍然有18%的誤分類率。而所提出的方法在進行故障分類時,所有故障類別分類準確度都在95%以上。
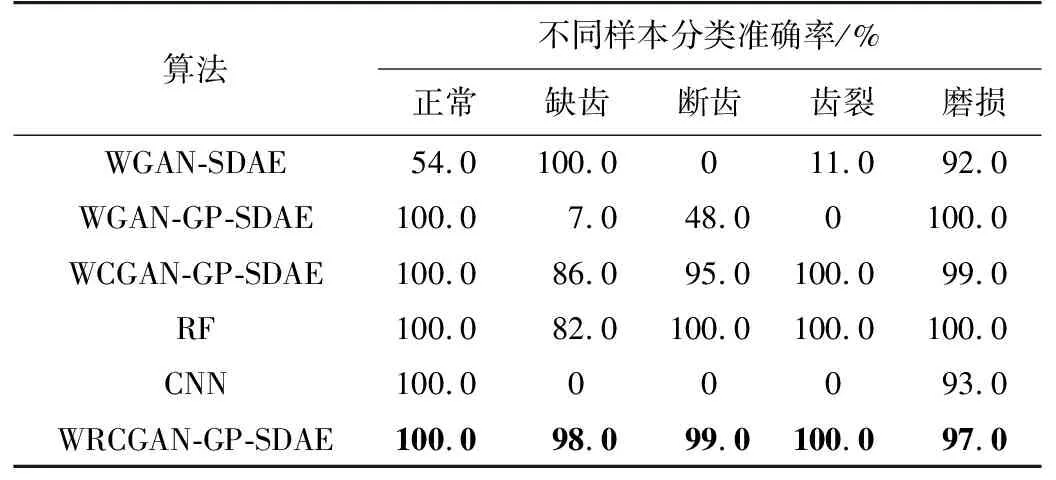
表5 故障分類準確率對比
綜上對比實驗結果表明,本研究提出的故障診斷方法在樣本特征相似、故障信息難以提取的情況下,能夠生成質量更高的樣本,有效平衡數據集且顯著提升故障診斷準確率。
4 結論
針對風機齒輪箱實際工況中故障樣本數量少的問題,提出一種基于WRCGAN-GP的故障診斷方法,將樣本生成模型在原始WGAN-GP中加入標簽信息,并將原有的多層感知器替換成為具有描述數據內在關系和分析時間深度上相關性能力的循環卷積網絡,挖掘樣本中更深層次的故障信息,生成了更高質量的新樣本,同時通過SDAE進行特征提取并實現故障診斷。將所提出方法在風力渦輪傳動系統數據集上進行對比分析,結果表明,所提出的方法可以有效捕捉難以提取的深層次故障特征分布,生成高質量樣本并提高故障診斷準確率。值得指出的是,WRCGAN-GP中的循環卷積結構在一定程度上增加了模型參數,使訓練耗時大于傳統GAN,因此如何進一步優化網絡結構、提高網絡的訓練速度是下一步研究內容。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21