基于德?tīng)査治鰞x的電驅(qū)總成系統(tǒng)故障診斷研究
2024-03-09 08:34:49謝中東楊蒙
專(zhuān)用汽車(chē) 2024年2期
關(guān)鍵詞:故障診斷
謝中東 楊蒙

摘要:為保證電驅(qū)總成系統(tǒng)開(kāi)發(fā)進(jìn)度,及時(shí)發(fā)現(xiàn)電驅(qū)總成系統(tǒng)在耐久試驗(yàn)中發(fā)生的故障類(lèi)型及故障位置,避免樣品過(guò)度損壞和保護(hù)測(cè)試設(shè)備,保證研發(fā)周期。以某型號(hào)電驅(qū)總成系統(tǒng)為研究對(duì)象,在耐久試驗(yàn)采用德?tīng)査治鰞x對(duì)電驅(qū)總成系統(tǒng)進(jìn)行實(shí)時(shí)監(jiān)控其振動(dòng)信號(hào),并結(jié)合時(shí)域分析、頻域分析、階次分析等理論快速分析出其故障發(fā)生的位置以及故障類(lèi)型。
關(guān)鍵詞:德?tīng)査治鰞x;電驅(qū)總成系統(tǒng);故障診斷
中圖分類(lèi)號(hào):U469 ?收稿日期:2023-12-13
DOI:10.19999/j.cnki.1004-0226.2024.02.023
1 前言
隨著能源危機(jī)和全球溫室效應(yīng)的日益嚴(yán)重,近年來(lái)國(guó)家逐步推廣新能源,使之替代傳統(tǒng)能源[1-2]。其中電動(dòng)車(chē)作為目前新能源行業(yè)中的代表,已經(jīng)是各個(gè)車(chē)企主要的發(fā)展方向。新能源汽車(chē)在結(jié)構(gòu)及動(dòng)力方面的改革與創(chuàng)新,使其對(duì)故障診斷技術(shù)要求更高[3]。故障診斷技術(shù)常用于診斷機(jī)械設(shè)備運(yùn)行的狀態(tài)以及故障狀況,其原理是借助于檢測(cè)設(shè)備,通過(guò)診斷方案識(shí)別與判斷出設(shè)備的運(yùn)轉(zhuǎn)狀態(tài),并針對(duì)存在的故障現(xiàn)象展開(kāi)詳細(xì)的研究,分析得出引發(fā)故障的因素、形式以及故障大小、未來(lái)發(fā)展趨勢(shì)等[4-6]。故障診斷技術(shù)研究分為以下三種類(lèi)型:
a.故障機(jī)理研究。重要之處就是確定引發(fā)故障的原因,并對(duì)原因進(jìn)行區(qū)分,對(duì)主要原因與次要原因進(jìn)行定位,基于此可以為進(jìn)一步的診斷工作提供依據(jù)。
b.故障信息的研究。故障信息的分析處理是診斷故障的關(guān)鍵核心。通過(guò)對(duì)信息進(jìn)行整體性分析、處理,采集其中對(duì)診斷故障有用的信息,并展開(kāi)研究,最終將獲得故障的信息特征。
c.故障診斷理論和方法的研究。根據(jù)發(fā)生故障的原因,將定量分析法和定性分析的方法結(jié)合起來(lái),對(duì)得到的故障信號(hào)進(jìn)行處理,并輸入到故障診斷模型中,得到故障診斷結(jié)果。
電驅(qū)總成系統(tǒng)是電動(dòng)汽車(chē)的動(dòng)力來(lái)源[7]。電驅(qū)總成系統(tǒng)的運(yùn)行性能和電氣特性直接決定電動(dòng)汽車(chē)的性能,電驅(qū)總成系統(tǒng)的研發(fā)是各大車(chē)企的重要任務(wù),一套成熟的電動(dòng)總成系統(tǒng)需要進(jìn)行性能、環(huán)境和耐久等一系列測(cè)試。其中多種不同工況的耐久測(cè)試是檢驗(yàn)其可靠性的重要依據(jù),在長(zhǎng)時(shí)間的耐久測(cè)試時(shí),電驅(qū)總成系統(tǒng)經(jīng)常會(huì)出現(xiàn)內(nèi)部齒輪、軸齒及外殼的損壞失效等,因此在測(cè)試過(guò)程中對(duì)電驅(qū)總成系統(tǒng)進(jìn)行故障監(jiān)控及實(shí)時(shí)分析十分重要。
2 電驅(qū)總成系統(tǒng)耐久測(cè)試故障診斷系統(tǒng)
2.1 德?tīng)査治鰞x
德?tīng)査治鰞x由本地PC(含顯示器、鍵盤(pán)機(jī)及鼠標(biāo))、測(cè)量單元、速度盒、UPS及測(cè)量組件(傳感器、電纜與電荷放大器)組成。在常見(jiàn)的耐久測(cè)試中,電驅(qū)總成系統(tǒng)的內(nèi)部故障被發(fā)現(xiàn)時(shí),其內(nèi)部部件往往出現(xiàn)嚴(yán)重?fù)p壞或者失效。在早期出現(xiàn)細(xì)微點(diǎn)蝕或者裂紋時(shí)并沒(méi)有明顯特征。樣機(jī)出現(xiàn)故障往往是以振動(dòng)異常的形式表現(xiàn),因此德?tīng)査治鰞x通過(guò)分析軟件能夠基于測(cè)得的振動(dòng)特性數(shù)據(jù)分析確定故障位置,并能從中推斷故障的發(fā)生和演化過(guò)程,盡快確認(rèn)故障原因并有效解決問(wèn)題[8-9]。
該系統(tǒng)應(yīng)用于傳動(dòng)系耐久試驗(yàn)中,在耐久性試驗(yàn)過(guò)程中能夠基于被測(cè)對(duì)象,如變速箱、驅(qū)動(dòng)橋、電驅(qū)總成系統(tǒng)等的機(jī)械振動(dòng)特性變化并結(jié)合時(shí)域分析、頻域分析、階次分析等理論分析被測(cè)樣品特性,監(jiān)控并自學(xué)習(xí)樣品在整個(gè)試驗(yàn)過(guò)程中的工作狀態(tài),在故障發(fā)生初期及時(shí)發(fā)現(xiàn)故障并及時(shí)向試驗(yàn)臺(tái)發(fā)出報(bào)警信號(hào),實(shí)現(xiàn)及時(shí)終止試驗(yàn)進(jìn)程,防止出現(xiàn)樣品嚴(yán)重失效或損傷試驗(yàn)臺(tái)架等不可挽回的損失。德?tīng)査治鰞x提供關(guān)于額外關(guān)于故障開(kāi)始和故障原因的說(shuō)明,因此它可以為研發(fā)工程師提供用于結(jié)果優(yōu)化的有價(jià)值信息。
2.2 故障診斷系統(tǒng)搭建
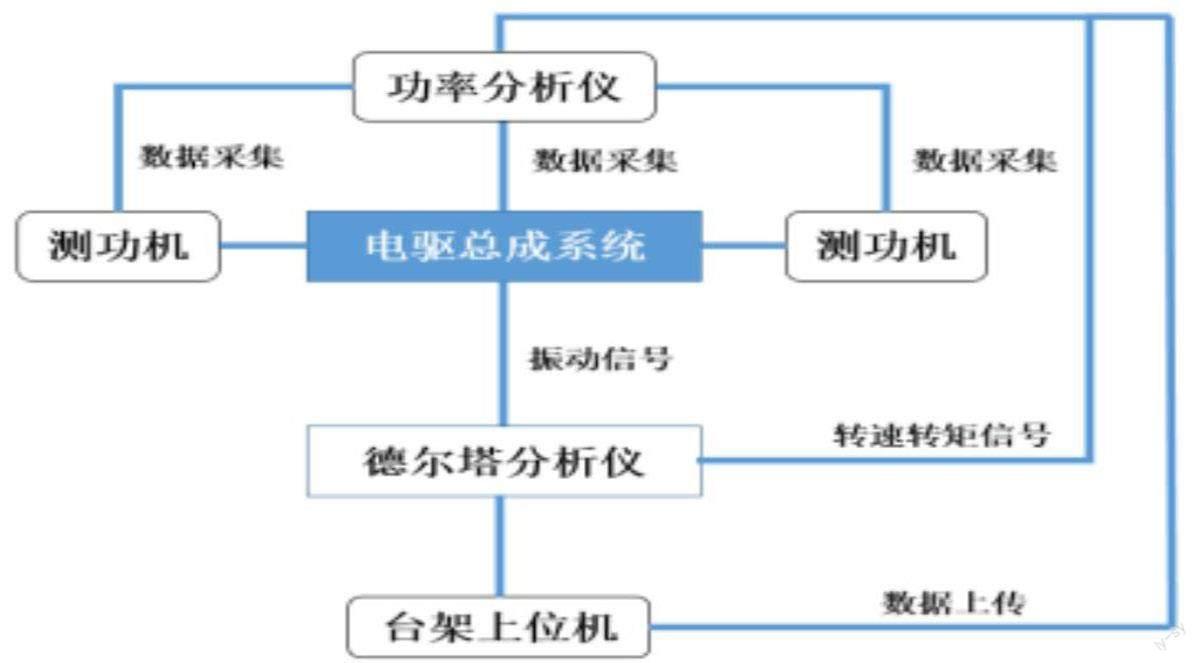
圖1所示為電驅(qū)總成系統(tǒng)耐久測(cè)試故障診斷系統(tǒng),整個(gè)系統(tǒng)首先通過(guò)振動(dòng)、轉(zhuǎn)速、轉(zhuǎn)矩、電流、電壓等傳感器采集到電信號(hào)數(shù)據(jù)傳輸?shù)焦β史治鰞x,經(jīng)過(guò)功率分析儀的計(jì)算及整合傳輸?shù)脚_(tái)架上位機(jī),以此得到各類(lèi)測(cè)試數(shù)據(jù)并保存在臺(tái)架上位機(jī)中。德?tīng)査治鰞x則通過(guò)安裝在電驅(qū)總成系統(tǒng)上的振動(dòng)傳感器采集到振動(dòng)信號(hào)數(shù)據(jù)(其中振動(dòng)傳感器分別安裝于電機(jī)端、減速器端以及控制器上,方向垂直于水平方向),經(jīng)過(guò)一定時(shí)間的自學(xué)習(xí)得到電驅(qū)總成系統(tǒng)處于正常狀態(tài)時(shí)數(shù)據(jù)模式[10-11]。當(dāng)后續(xù)耐久測(cè)試時(shí),采集到數(shù)據(jù)超出一定的區(qū)間范圍,德?tīng)査治鰞x通過(guò)臺(tái)架上位機(jī)控制整個(gè)測(cè)試停止。測(cè)試停止后,根據(jù)德?tīng)査治鰞x采取的各類(lèi)數(shù)據(jù)分析其故障原因及故障位置。
2.3 德?tīng)査治鰞x配置
在進(jìn)行耐久測(cè)試前,需要根據(jù)實(shí)際耐久工況對(duì)德?tīng)査治鰞x進(jìn)行配置,具體配置方法如下:
a.打開(kāi)軟件dARun,點(diǎn)擊主界面上autoExpert,即可開(kāi)始創(chuàng)建新的試驗(yàn)文件。
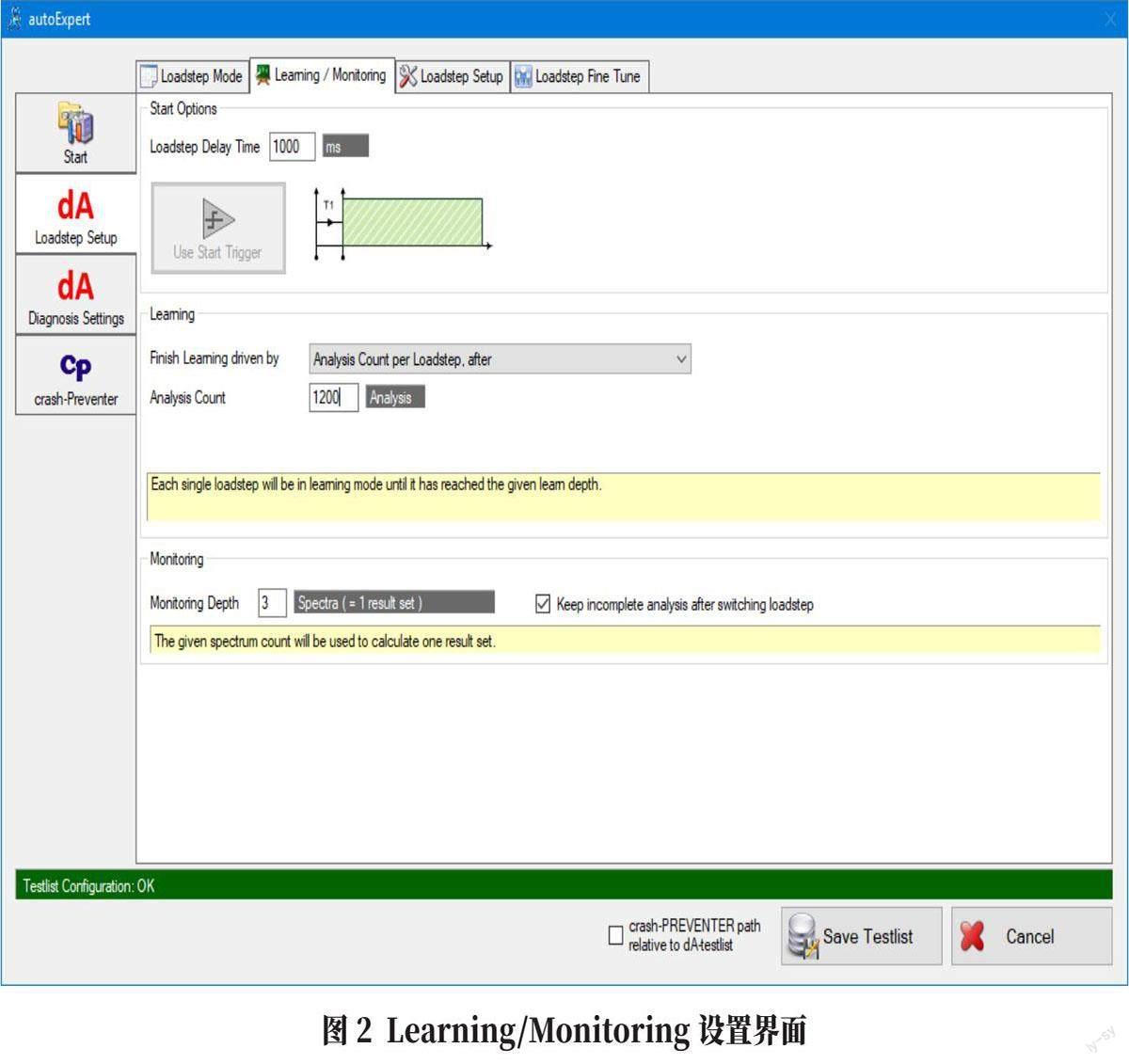
b.點(diǎn)擊Learning/Monitoring選項(xiàng)卡,出現(xiàn)如圖2中的界面。在該界面中設(shè)置Loadstep delay為1 000 ms,learning length為2 000和Motoring Depth為3。
c.先點(diǎn)擊Diagnosis Settings,再選擇Alarm Settings選項(xiàng)卡,在該界面中設(shè)置報(bào)警限值,設(shè)置Threshold為6 000。
d.點(diǎn)擊Loadstep Setup選項(xiàng)卡,根據(jù)試驗(yàn)規(guī)范設(shè)置步長(zhǎng)(數(shù)據(jù)卡)。設(shè)置Torque_Eng為[-500,500],Speed_Eng為[0,15 000],TrsmOilT為[30,150](樣品參數(shù)改變,參數(shù)值設(shè)置相應(yīng)改變)。
e.點(diǎn)擊crash-Preventer(CP)勾選上德?tīng)査治鰞x的采集通道,CP通道報(bào)警設(shè)置,延遲設(shè)置為400 ms。
報(bào)警類(lèi)型分為兩類(lèi):dA報(bào)警與CP報(bào)警(兩種類(lèi)型同時(shí)運(yùn)行)。
①dA報(bào)警:dA報(bào)警基于當(dāng)前報(bào)警振動(dòng)譜線與自學(xué)習(xí)后的振動(dòng)上下限譜線進(jìn)行對(duì)比,計(jì)算出的趨勢(shì)值與設(shè)定的閥值進(jìn)行比較,若連續(xù)兩個(gè)分析的趨勢(shì)值(軟件默認(rèn)設(shè)置為2個(gè)分析)大于設(shè)定的閾值,則軟件輸出dA報(bào)警。dA報(bào)警通常針對(duì)于小能量故障。
②CP報(bào)警:全稱(chēng)Crash Preventer報(bào)警,快速?zèng)_擊保護(hù)。大能量故障導(dǎo)致的結(jié)構(gòu)損壞,軟件輸出CP報(bào)警信號(hào)。
f.點(diǎn)擊Save Testlist按鈕,出現(xiàn)以下窗口設(shè)置文件名,一般輸入電驅(qū)總成系統(tǒng)名、試驗(yàn)名、臺(tái)架號(hào)、日期等,點(diǎn)擊open/打開(kāi)按鈕保存此次試驗(yàn)配置。保存完畢后回到了主界面,如圖3所示。
g.找到對(duì)應(yīng)文件,點(diǎn)擊Start Testlist,即開(kāi)始對(duì)耐久測(cè)試進(jìn)行實(shí)時(shí)監(jiān)控。
2.4 故障診斷及分析
以某型號(hào)電驅(qū)總成系統(tǒng)為研究對(duì)象,在進(jìn)行耐久測(cè)試驗(yàn)證其可靠性時(shí),德?tīng)査治鰞x檢測(cè)到被測(cè)對(duì)象機(jī)械結(jié)構(gòu)上故障的始發(fā)或加劇,觸發(fā)dA報(bào)警(dA為delta分析報(bào)警,為一般報(bào)警)。測(cè)試臺(tái)架接收到dA報(bào)警時(shí),向臺(tái)架發(fā)出警報(bào)信號(hào)并觸發(fā)臺(tái)架聲光報(bào)警,實(shí)現(xiàn)臺(tái)架停機(jī)。
幾種典型故障的振動(dòng)及特征頻率如下:
a.定子故障。如定子匝間短路、相間短路等,特征頻率一般以倍頻的形式出現(xiàn):[f0、2f0、4f0、6f0]。
b.軸承故障。軸承故障通常出現(xiàn)損壞的部件為外圈、內(nèi)圈、滾動(dòng)體和保持架等,當(dāng)部件出現(xiàn)磨損會(huì)帶來(lái)的沖擊引起的振動(dòng)[12]。
軸承內(nèi)圈、軸承保持架:[0.5Zn60(1-dDcosβ)];
軸承外圈:[0.5Zn60(1+dDcosβ)];
軸承滾動(dòng)體:[Ddn601-(dDcosβ)2]。
式中,Z為滾動(dòng)體個(gè)數(shù);n為轉(zhuǎn)速,r/min;d為滾動(dòng)體直徑,mm;D為滾動(dòng)體分布直徑,mm;[β]為軸承壓力角,(°);p為極對(duì)數(shù);s為轉(zhuǎn)差率[13]。
c.轉(zhuǎn)子故障。轉(zhuǎn)子損壞導(dǎo)致的轉(zhuǎn)子不平衡:[k(1-s)/p±sf0,k=1,2,…]。
式中,[f0]為電源頻率,Hz。
d.氣隙不均勻。分為靜態(tài)偏心和動(dòng)態(tài)偏心,常導(dǎo)致轉(zhuǎn)子動(dòng)不平衡等故障:[2f0、2sf0]。
打開(kāi)delta Evaluation數(shù)據(jù)分析軟件,得到如圖4頻譜圖,頻譜明顯超差,QI指標(biāo)不合格。頻譜中8階、16階、24階、32階、48階存在異常偏差即代表定子存在故障。通過(guò)拆機(jī)檢查后發(fā)現(xiàn)如圖5定子跨槽現(xiàn)象,更換定子后故障排除。
打開(kāi)delta Evaluation數(shù)據(jù)分析軟件,得到圖6所示的頻譜圖,頻譜明顯超差,QI指標(biāo)不合格。頻譜中3.6階,20~60階明顯升高。通過(guò)拆機(jī)檢查后發(fā)現(xiàn)圖7所示的膠圈破損現(xiàn)象,更換膠圈后故障排除。
綜合以上兩種情況,當(dāng)測(cè)試臺(tái)架接收到來(lái)自德?tīng)査治鰞x的報(bào)警時(shí),通過(guò)分析其頻譜圖曲線得到其內(nèi)部存在故障情況,拆機(jī)后檢查樣機(jī)狀態(tài)與德?tīng)査治鰞x的監(jiān)控及分析情況一致。整個(gè)故障診斷系統(tǒng)能夠及時(shí)且有效地發(fā)現(xiàn)耐久測(cè)試過(guò)程中的故障情況。
3 結(jié)語(yǔ)
本文以某型號(hào)電驅(qū)總成系統(tǒng)為研究對(duì)象,通過(guò)分析了解德?tīng)査治鰞x以及整個(gè)故障診斷系統(tǒng)的工作原理,搭建故障診斷系統(tǒng)實(shí)現(xiàn)對(duì)于電驅(qū)總成系統(tǒng)在耐久測(cè)試的實(shí)時(shí)監(jiān)測(cè),盡快發(fā)現(xiàn)其早期故障并分析其故障原因。以實(shí)際耐久測(cè)試項(xiàng)目為例,根據(jù)對(duì)其頻譜圖曲線進(jìn)行分析,實(shí)際存在的故障情況與德?tīng)柗治鰞x得到的故障信號(hào)一致,證明整個(gè)故障診斷系統(tǒng)能夠有效解決電驅(qū)總成系統(tǒng)在耐久測(cè)試無(wú)法及時(shí)發(fā)現(xiàn)早期故障的問(wèn)題。故障診斷系統(tǒng)能夠保證電驅(qū)總成系統(tǒng)研發(fā)周期,大大降低樣品嚴(yán)重?fù)p壞的概率,對(duì)于電驅(qū)總成系統(tǒng)驗(yàn)證其可靠性存在重要意義。
參考文獻(xiàn):
[1]郭高峰.基于振動(dòng)信號(hào)共振解調(diào)的電機(jī)故障診斷技術(shù)研究[D].武漢:華中科技大學(xué),2022.
[2]柴鳳,耿麗娜,裴宇龍.軸裂相整數(shù)槽集中繞組永磁容錯(cuò)電機(jī)及其匝間短路故障抑制研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2023,43(13):5203-5218.
[3]包不利.新能源汽車(chē)維護(hù)與保養(yǎng)[M]北京:機(jī)械工業(yè)出版社,2018.
[4]Yang Q,Wang R,Ma M,et al.A Fault Tolerant Switched Reluctance Motor Drive For Electric Vehicles Under Multi-switches Open-Fault Conditions[J].Microelectronics Reliability,2020,114:754-761.
[5]Wang S,Li Q,Jiang X,et al.Open-Circuit Fault Diagnosis Strategy for Dual-Winding PermanentMagnet Motor Based on High Frequency Current Signal Injection Method[C]//22ndInternational Conference on Electrical Machines and Systems (ICEMS),2019.
[6]Xi A,Su A ,Jie L B,et al.A Strong Robustness Open-Circuit Fault Fiagnosis Strategy For NovelFault-Tolerant Electric Drive System Based On D-O-Axis Current Signal[J].Chinese Journal ofAeronautics,2021,34(10):115-127.
[7]間佳樂(lè).基于振動(dòng)分析的電機(jī)故障診斷方法[J].集成電路應(yīng)用2021,38(7):88-89.
[8]李曉藝.純電動(dòng)汽車(chē)驅(qū)動(dòng)電機(jī)損耗計(jì)算及溫度特性分析[D].合肥:合肥工業(yè)大學(xué),2017.
[9]鄧奇.基于改進(jìn)LMD和粒子群優(yōu)化最小二乘支持向量機(jī)的風(fēng)電機(jī)組齒輪箱故障診斷[D].西安:西安理工大學(xué),2021.
[10]李港,趙春領(lǐng),熊開(kāi)洋.基于物理原因的永磁同步電機(jī)故障產(chǎn)生機(jī)理及診斷研究綜述[J].汽車(chē)文摘,2022(4):7-12.
[11]王斌.基于振動(dòng)特性的電機(jī)狀態(tài)監(jiān)測(cè)與故障診斷系統(tǒng)設(shè)計(jì)[D].青島:青島大學(xué),2021.
[12]段禮祥,陳瑞典,張來(lái)斌,等.機(jī)械設(shè)備振動(dòng)監(jiān)測(cè)的自適應(yīng)變采樣算法研究[J].儀表技術(shù)與傳感器,2019(7):121-126.
[13]熊邦書(shū),張曉飛,歐巧鳳.基于等價(jià)LBP紋理圖譜的滾動(dòng)軸承故障診斷方法[J].南昌航空大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,34(4):1-6.
作者簡(jiǎn)介:
謝中東,男,1996年生,工程師,研究方向?yàn)殡婒?qū)測(cè)試。
基金項(xiàng)目:中汽研汽車(chē)檢驗(yàn)中心(武漢)有限公司科研項(xiàng)目“新能源電驅(qū)動(dòng)總成故障測(cè)試分析研究”(202308)
猜你喜歡
一重技術(shù)(2021年5期)2022-01-18 05:42:10
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
制造技術(shù)與機(jī)床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術(shù)與機(jī)床(2017年10期)2017-11-28 05:20:43
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動(dòng)工程學(xué)報(bào)(2014年2期)2014-03-01 01:15:22
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
振動(dòng)、測(cè)試與診斷(2014年4期)2014-03-01 01:14:00