管網智能巡檢運維機器人設計研究
2024-03-10 03:13:34周銘基謝奇志李洪盛
中國設備工程 2024年4期
周銘基,謝奇志,李洪盛
(徐州工程學院,江蘇 徐州 221018)
1 前言
冷庫的發展反映了一個國家食品工業的發展水平、技術實力,甚至是綜合國力。在大型冷庫的生產中,制冷系統的耗電量占總耗電量的50%~60%。冷庫的制冷性能受到運行條件、室內外條件等多種干擾因素的影響。如圖1 所示,由于冷庫內部結霜,阻礙了冷能在管道中的傳導和釋放,最終影響制冷效果。當霜層冰層厚度達到一定程度時,制冷效率甚至下降到30%以下,導致電能極大浪費,且縮短制冷系統的使用壽命。因此,有必要在適當的周期內進行冷庫除霜操作。現有除霜方式一般為人工使用清理工具清掃除霜,貨物需要搬動,引起庫溫波動較大,影響冷凍冷藏質量。通過設計機器人實現管網攀爬除霜,減少貨物挪動而引起的貨溫變化、貨物變質,避免人力除霜強度大以及凍傷等不良后果。

圖1 冷庫管網結霜
本文查閱了國內外特種機器人設計理論與技術現狀及發展趨勢,分析現有巡檢特種機器人機構的功能實現及適用范圍,設計研究適用于冷庫管道巡檢的特種機器人,得出指導性研究方向和研究思路,攻克制約產業發展的瓶頸技術難關。提出冷庫運維特種機器人架構體系,研發高效專業化設備,用于指導冷庫特種機器人的實際產品設計與應用。
2 總體思路
如圖2 所示,基于除霜機器人的工作環境、工作流程及方法,建立客戶需求描述模型、信息集成模型,建立除霜機器人結構及系統。從行走、除霜、檢測和控制四個維度入手,設計除霜特種機器人的行走方式,實現攀爬行走;集成機械與射流相結合的多模式除霜機構,實現機器人高效潔凈除霜;搭建三維檢測系統,獲取冷庫溫濕度計霜層厚度的空間參數分布,實現精準除霜;研究機器人的智能控制系統,實現機器人的自主行走和作業。
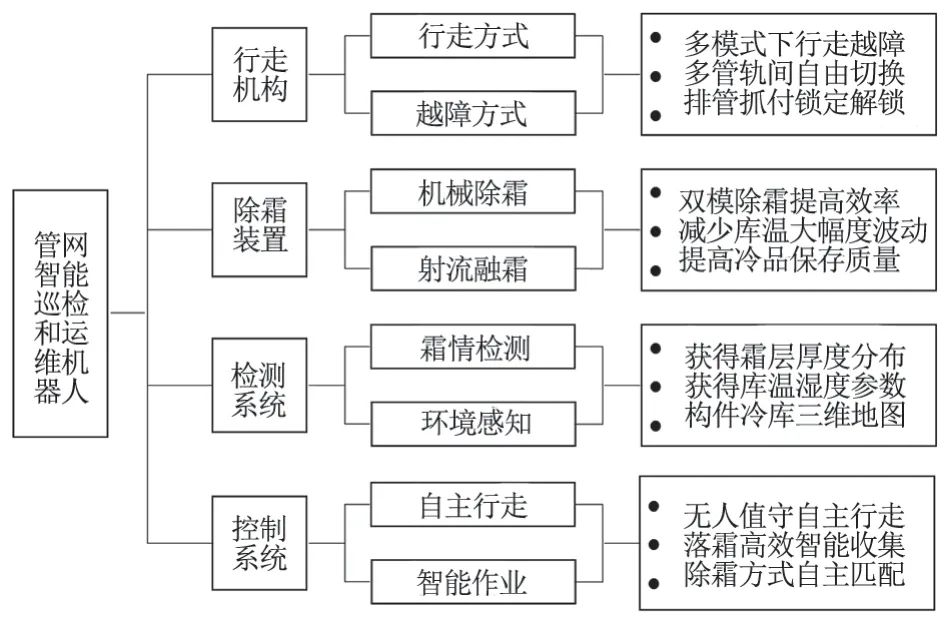
圖2 智能運維機器人系統架構
3 行走機構
如圖3 所示,機器人主要由后部熱融組件1、后部機械手2、磨削組件3、變形機構4、前部機械手5 和前部熱融組件6 構成。行走機構主要由機械手和變形機構組成,機器人的機械手抓附機構防止機器人在垂直攀爬或懸吊行走過程中打滑或墜落。后部機械手2 的減速電機2-1 用于驅動夾爪2-2 開合運動。磨削組件3 的旋轉電機3-4 用于驅動擺臂3-2 做橫擺運動,以覆蓋整個圓周工作范圍。伸縮電機3-5 可調整擺臂3-2 以及打磨鉆頭3-1 相對排管霜層的距離。基于攝像頭3-3 采集結果,打磨鉆頭輔助熱氣除霜,即機械與射流相結合的除霜方式,進行高效精準雙模除霜。變形機構4 設計為共邊雙平行四邊形結構,使得后部機械手2 和前部機械手5 能夠始終保持平行,從而方便對相鄰兩個管道的抓附鎖緊。
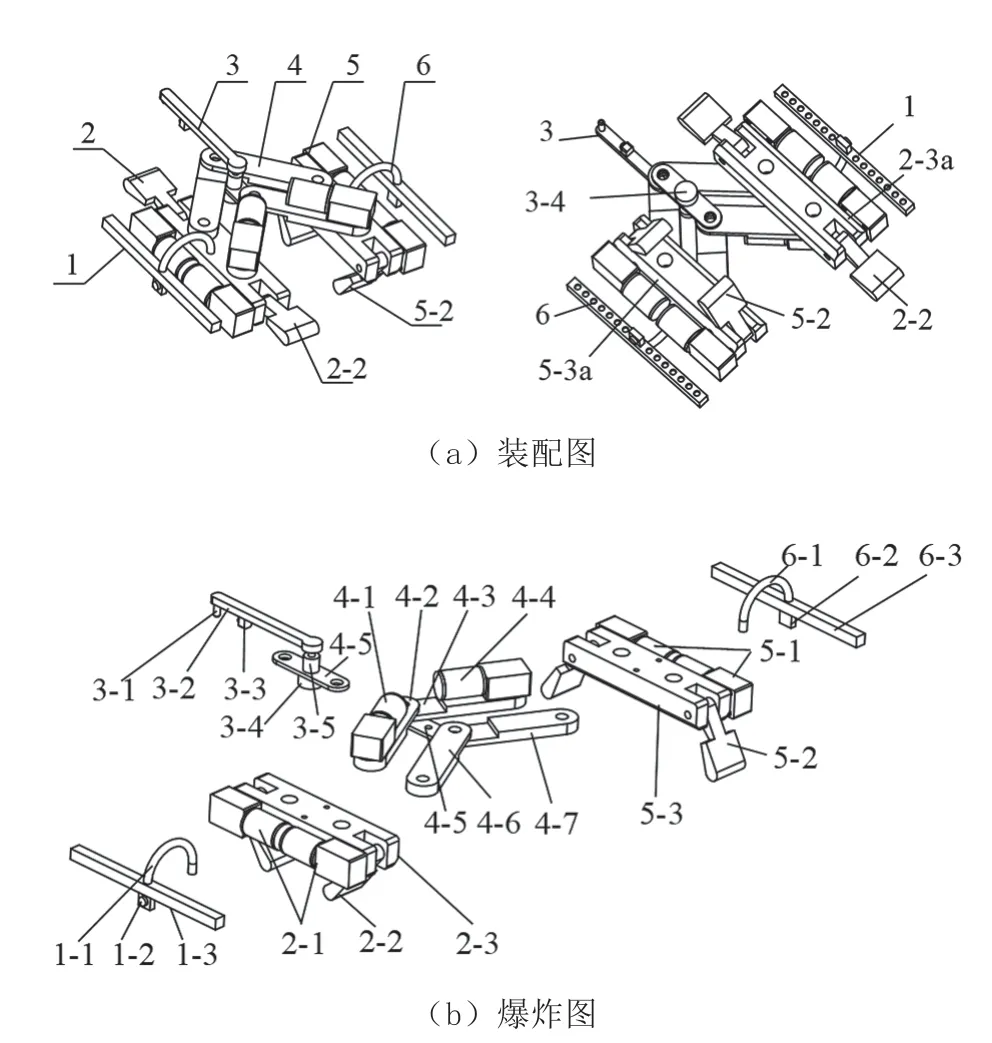
圖3 機器人結構方案圖
如圖4 所示,管網7 主要由鐵架7-1、鐵箍7-2 和排管7-3 構成,排管通過鐵箍固定在鐵架上,鐵架固定在冷庫四周或頂部的墻壁上。機器人同時實現機器人沿管道軸向的伸縮式避障運動、沿管道橫向的多管軌切換路線,如圖4(a)~(d)所示。通過軸向折展,實現機器人沿管道軸向的伸縮式步態運動;通過斜向折展,實現機器人沿管道橫向的管軌變化。

圖4 機器人在冷庫排管上行走狀態圖
4 除霜系統
機器人的后部熱融組件1 包括用于輸送高壓水射流的管柱1-1,用于檢測霜層分布的攝像頭1-2,底部開有若干小孔的分流板1-3。設計機械除霜和熱流除霜相結合的除霜結構,保證除霜效率、除霜潔凈率。基于視覺技術,實現霜層厚度精準定位和檢測。對于薄霜層,采用熱流除霜,通過高壓水射流將熱水噴射到霜層或冰層上,超聲空化作用加速霜層溶解。對于厚冰層,大量采用熱流除霜會耗費很多能量,而機械除霜輔助熱流除霜,以敲擊振動的方式將松動的冰層振落并進行回收,以減少能耗。
5 測控系統
本文提出的一種特種除霜機器人,搭載霜情檢測系統,集成視覺距離傳感器,獲取霜層分布、厚度、面積等信息。基于目標檢測算法和多傳感器融合,提高識別速度和識別準確率。設計人機交互界面和工控屏幕,利用屏幕區域的顏色變化表征霜情嚴重程度,并及時釋放預警信號,提醒除霜。環境感知系統用于獲取冷庫空間內溫度、濕度、氣體組分的空間分布狀態。攜帶溫度、濕度、氣體檢測傳感器,建立多傳感器視覺和熱成像融合檢測系統,保障冷媒管路暢通,獲得冷媒流態分布。
結合人工智能技術和機器人技術搭建智能控制系統,設計集霜和除霜動作自適應協調控制算法,實現同步集霜;對機器人的行走路徑、折展變形、行走速度、除霜動作進行規劃和控制,實現自主行走和智能操作。
6 結語
本文通過上述研究工作,探索冷庫管網巡檢運維機器人的技術體系、實現方式、設計方法及工作流程,對機器人除霜作業整個過程進行質量把控,綜合判據技術、經濟、環境、資源、能源等各項指標,促進我國冷庫除霜行業的智能化、無人化和規范化建設。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
