修井井口機械自動化技術在油田管理的應用研究
2024-03-10 03:13:36劉興東
中國設備工程 2024年4期
劉興東
(大慶油田井下作業分公司修井一大隊,黑龍江 大慶 163000)
新時期,石油開采工藝不斷優化完善,自動化程度明顯提升,修井作業可有效提高采油質量與效率,具有系統性、技術性、危險性等特點,為規避潛在安全隱患,機械自動化技術被應用其中,通過遠程操控、自動化作業完成修井全過程,為油田管理安全發展奠定基礎,具有較好的發展前景。因此,聯系實際分析修井井口機械自動化技術在油田管理中的應用具有現實意義。
1 修井井口機械自動化技術概述
現代化生產作業中,機械自動化技術應用已經十分普遍,使機械、裝置在無人干預的情況下,按照提前設計好的程序、指令進行操作或控制。修井是一項精細的危險性工作,若操作不慎,很有可能為作業人員帶來危險,機械自動化技術的應用可盡可能規避這一情況,減少人工參與、人工干預,降低危險發生概率。就目前發展情況來看,修井井口機械自動化技術主要涵蓋以下幾項內容:
(1)井口對中技術。為保證上扣順利進行,下放管柱、井中管柱需在扶正設備下的輔助下對準,防止發生位置便宜影響對中效果;(2)自動定位與換擋技術。在修井作業中,液壓鉗往往需要人工操作來完成,是較為關鍵的一環,為提高機械自動化水平,液壓鉗就必須具備自動定位與換擋技術;(3)起升系統協調技術。主要是為了保證抓取待上提管柱和釋放管柱過程順利;(4)自動送管技術。根據油田采油、修井作業實際情況與現場條件,將管柱送達到指定位置完成接送;(5)模塊化技術。即將井口機械自動化技術的各個應用環節相互串聯,通過精準化設計降低操作難度,增強系統集成性、系統性,確保修井作業能夠高質量、高效率完成。考慮到修井作業的特殊性以及不同油田采油設備、需求等的差異,在機械自動化技術應用過程中,必須對各項參數進行適當修正,遵循因地制宜原則,具體問題具體分析,切實提高機械自動化技術應用有效性,為石油企業創造更高的經濟價值。
2 機械自動化技術的應用價值
2.1 經濟價值
石油開采通常是以獲取經濟利益為目標,是企業提高經濟收入的重要途徑。然而,由于石油大多深藏于地下,若要開采不僅需要前期投入較多資金進行油田建設與管理,同時還要突破技術性困難問題,這樣才能保證石油開采質量、效率、安全。在開采過程中,修井作業效果會直接影響油田管理與開采水平,而機械自動化技術的應用可提高采油質量與效率,經濟價值尤其顯著。一方面,其應用能夠降低修井人員的作業難度與強度,減少人力資源消耗,提高人力資源有效利用率,從而實現用人成本控制,且自動化技術能有效延長作業時間,不再需要以人工方式進行24h 監督作業,降低石油開采的整體成本;另一方面,機械自動化技術的應用可提高修井作業效率,相對地采油質量會有所提升,在相同的時間內獲得更多石油,切實提高石油企業所獲得的經濟效益,經濟價值尤其鮮明。
2.2 安全價值
修井技術是一門動態工程學科,但同時也需要對基本地質、周圍環境、作業影響因素進行分析,只有這樣,才能夠保證順利完成既定工作任務。整個過程中,作業人員通常會面臨極大危險:(1)爆炸。若井筒內外氣體沒能得到有效控制,發生氣體泄漏、電火花或靜電,就有可能引發爆炸事故,對設備、人體造成極大損傷;(2)中毒。井下氣體中可能會含有有害物質,如甲烷、硫化物等,人體吸入后會產生頭痛、惡心等不良癥狀,嚴重時還會失去意識,后果不堪設想;(3)高空墜落。部分修井工作是在高空完成,操作不當或客觀因素可能會導致人員從高處墜落;(4)機械損壞。修井中人員需要操作抽油泵、壓裂泵、氣壓機、卷揚機等設備,若設備運行不穩定,有可能造成人員受傷。
機械自動化技術的應用,可降低人工作業頻率,通過提前設置作業流程,讓設備進行自動作業、操作,減少人員直接參與,避免修井危險事故造成人員傷亡情況。遠程控制系統的應用,使作業人員在遠離井口的位置完成操作,即使發生安全事故也能及時撤離,而系統也會對機械自動化技術應用情況進行監測,若設備參數異常,也可提前采取有效措施進行處理,提高修井安全性。另外,對于部分由人員操作失誤所引起的安全事故,也能起到較好的預防作用,確保修井安全。
2.3 生態價值
修井井口機械自動化裝置會隨著科技進步而有所發展,傳統修井機械通常柴油為主要驅動,而柴油機械在作業過程中,不僅會產生較大噪聲,同時還會產生有害物質,如一氧化碳、氮氧化物、顆粒物等,不僅會對環境產生較大污染,被人體吸入還有可能對呼吸道產生刺激,誘發呼吸道疾病、哮喘等。目前,以電力為驅動的修井井口機械自動化裝置已經產生,比如,大慶油田首套自主設計制造的全自動修井作業系統,具有效率高、成本低、低噪音、綠色環保等優勢,不僅降低油田的運行成本,提高修井作業的有效性,還能有效減少污染物質產生,是綠色、環保的生產作業發展,具有較高的生態價值(如圖1所示)。
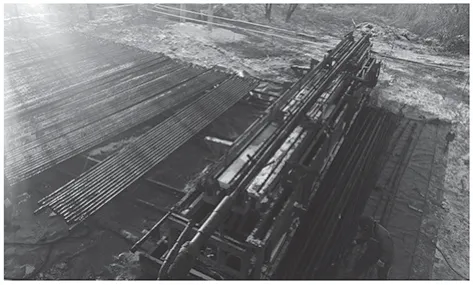
圖1 全自動修井作業系統礦場試驗現場圖
3 油田修井井口機械自動化技術的應用分析
3.1 懸吊系統
吊卡在修井作業中起懸持管柱的作用,傳統的修井作業通常需要人工完成吊環和吊卡的摘、搬、掛,吊卡銷子的拔、插作業,人力需求極大,且效率相對較低,在一定程度上影響修井作業有效性,若是操作失誤,還有可能發生危險事故。為改變這一情況,動力吊卡、動力卡瓦應時而生,主要是依靠液壓或氣壓系統向吊卡、卡瓦提供動力,控制吊卡或卡瓦的開合實現松開、卡緊管柱的操作,為機械自動化技術實現創造有利條件。目前,修井井口機械自動化裝置懸挑系統中,較為常用的是液壓吊卡和氣動卡瓦。另外,油田修井作業中經常會出現粘砂問題,需要進行清砂作業以保證修井進度,因此動力吊卡中通常會安裝沖砂裝置,該裝置是以過限位銷、液壓缸以及轉向彎頭和中心管、導軌為主要構成部分,借此解決粘砂問題,規避定期人工清砂為修井作業帶來的不確定影響,實際運行中,通過自動換單根的方式縮短時間,不需要反復拆接彎頭與水龍帶,將砂卡問題發生概率降到最低。
3.2 上卸扣系統
該系統在實際應用中,主要是通過遠程控制臺控制液壓鉗,幫助管柱進行上卸扣,液壓缸是液壓鉗控制的中樞位置,確保其能夠在作業平臺范圍內進行反復運動,借此替代人力搬運、摘扣吊卡等工作任務。具體實踐中,上卸扣系統負責協調扶正機械手、緩沖定位擋塊,保證起吊卡瓦與油管等同心,從而有效提高作業效率,防止起吊、下落過程中出現崩口、偏扣等問題,降低安全故障發生概率。該系統在實際應用中,是由一個靈活滑動的小車機座構成,移動小車安裝了遠程控制驅動,并配有自動升降機械手臂、左右擺動機架、主鉗總成裝置、管桿扶正裝置、防噴裝置。自動化運行期間,遠程控制系統會根據修井作業需求遠程控制小車運行,達到井口中心位置以后,升降座在升降臂和升降驅動的共同作用下升至油管接箍位置,主鉗總成會進行卸扣,在扶正系統的幫助下完成全過程,而后移動小車自動復位。該系統運行過程具有穩定性,機械自動化程度較高,修井作業質量與效率均得到提升。
3.3 送管系統
修井作業中,工人需要將管柱在操作平臺和管排架之間移送、排放等,操作頻繁,勞動強度大,消耗時間多。若要實現機械自動化發展,就必須解決管柱自動化排放問題。連桿移送、動力貓道、大臂旋轉移送是最為主要的類型。其中,連桿移動主要是以滑輪、吊裝系統構成,通過快速的管柱撥動翻轉,依托遠程控制系統進行快速、精準的管柱移動操作,進而縮短修井周期,減輕鉆井工人勞動強度;動力貓道可實現不同管柱從地面到鉆臺上的自動化輸送,移動較為快速;大臂旋轉移送取消了滑輪與吊升系統,主要是在地面用大臂機械手直接抓取需求的管柱,再通過液缸推動大臂旋轉起升達到井架的中心位置,將管柱輸送給井架中心位置頂驅或自動吊卡,完成送管任務,其應用對油井周圍環境有著一定要求,應用具有局限性。動力貓道是目前送管系統所應用的重要類型,適用性較強,在修井井口機械自動化裝置中的運用可有效降低成本,應用前景廣闊。比如,大慶油田在設備更新后,應用了液壓貓道,具有高質量、低成本特點,可通過遠程控制實現自由升降、油管推送,實現了油管自動化控制,地面施工人員僅需要一人,有效降低了勞動強度,同時減少吊裝上下操作臺的安全風險,在大慶油田的52 支隊伍中,液壓貓道已經得到了廣泛應用(如圖2 所示)。
圖2 大慶油田液壓貓道
3.4 遠程控制系統
機械自動化技術應用最顯著的特征,就是可進行遠程控制,這與傳統的修井作業有著較為本質的差異。可以說,遠程控制系統是油田修井井口機械自動化裝置的控制中樞,在遠離井口的同時從開闊處觀察井口作業情況,實現對整個系統單元的有效控制,提高自動化裝置的運作效率。系統分內外兩個部分,其中內部系統由手動調速閥、換向閥、節流閥構成,主要作用在于控制執行機構運行與工作速度;外部設置壓力表,可隨時查看系統壓力狀況。這些設備與遠程控制臺液壓管線相互連接,引入動力后基于控制命令,向井口自動化設備輸送動力。該遠程控制臺需設置在油田修井作業的安全區域范圍內,在保證與井口間距的同時,還需注重視野開闊性,便于操作人員隨時觀察井口狀態,對比系統參數動態協調懸吊系統、自動上卸扣系統、送管系統等,確保井口裝置能夠實現自動化運作,實現集成化管理。隨著油田修井井口機械自動化技術的應用,以及自動化裝置的更新,遠程控制系統也將會更加完善,功能會不斷拓展,而運作過程中產生的所有數據均會被有效記錄,在出現修井作業問題后為故障排查、糾錯等提供數據依據,最大程度上保障修井作業安全性。
4 結語
綜上所述,油田開采是一個系統化過程,其中任何一個環節出現問題都有可能為采油帶來危險隱患,增加危險性。為提高油田修井作業安全性,機械自動化技術應用十分必要,提高作業效率與質量的同時還能保證修井作業人員生命安全,規避隱患、降低風險,為作業人員創造安全工作環境。就目前修井井口機械自動化技術的應用情況來看,主要是由上卸扣系統、懸吊系統、輸送系統、遠程控制系統構成,基于機械自動化技術合理應用為企業創造更高的經濟價值,提升經濟效益,促進企業的可持續發展。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
