飛控系統(tǒng)四余度慣性測量系統(tǒng)的相關(guān)技術(shù)研究
2024-03-10 03:13:40羅慕成
中國設(shè)備工程 2024年4期
羅慕成
(中國直升機設(shè)計研究所,天津 300000)
隨著技術(shù)的進步,直升機的飛控系統(tǒng)起著越來越重要的作用。慣導(dǎo)系統(tǒng)是飛控系統(tǒng)的重要組成部分,其核心部件常由速率陀螺組、加速度計、安裝平臺和計算機等構(gòu)成。慣導(dǎo)系統(tǒng)輸出數(shù)據(jù)給飛控計算機,用以實現(xiàn)控制律的解算,從而控制直升機舵面使直升機以一定的高度、速度及姿態(tài)穩(wěn)定飛行。光纖陀螺具有啟動時間短、消耗功率低、響應(yīng)速度快等優(yōu)點,但是輸出信號包含隨機漂移。本課題結(jié)合常見的直升機控制特點,采用開環(huán)光纖陀螺敏感姿態(tài)信號、石英加速度計敏感加速度信號,同時引用加速度信號輔助陀螺輸出姿態(tài)信號。本文研究的飛控系統(tǒng)慣性測量系統(tǒng)可適用于大多數(shù)直升機飛行場景,且裕度高,成本低。
1 慣性測量系統(tǒng)硬件設(shè)計
1.1 速率陀螺組的選擇
測量飛行器角速率的陀螺儀屬于成熟部件,常見的光學(xué)陀螺是利用的Sagnac 效應(yīng),其中光纖陀螺采用的光纖傳感技術(shù)是利用光纖作為載光媒介,對傳輸光的某一特性根據(jù)被測量參數(shù)的變化進行調(diào)制,然后檢測出其變化的傳感技術(shù)。本文采用了開環(huán)光纖陀螺。
1.2 加速度計的選擇
加速度計是測量飛行器視加速度的慣性儀表,其測量原理是基于牛頓第二定律。本文采用的石英振梁加速度計是一種典型的微機械慣性器件,其結(jié)構(gòu)包括測頻電路、敏感質(zhì)量、石英諧振器、撓性支撐等。
1.3 慣性測量系統(tǒng)余度設(shè)計
飛控系統(tǒng)影響直升機飛行安全,配置余度常采用保守的設(shè)計方式。在研究民航客機的飛控余度設(shè)計后,提出一種四余度架構(gòu),使用4 套計算機構(gòu)筑相似的四余度系統(tǒng)。每個通道均使用一條指令支路和一條監(jiān)控支路。慣測為配合飛控系統(tǒng)的整體余度設(shè)計,采用四余度相似通道的設(shè)計。一套慣性測量系統(tǒng)包括慣性敏感組件(ISA)4 組,每組ISA 包括3 個開環(huán)光纖陀螺、3 個石英加速度計以及安裝臺體,開環(huán)光纖陀螺和石英加速度計正交裝配。同時,每組ISA 需配備相對應(yīng)的電子線路組件,每組電子線路組件包括綜合信息處理板,用以處理慣性敏感組件的輸出信號。通過增加監(jiān)控支路實現(xiàn)信號的自監(jiān)控,同時設(shè)立信號表決機制將多路來源的信號進行處理,實時比較4 路數(shù)據(jù)差值,當(dāng)差值大于門限,判斷該路數(shù)據(jù)不一致,采用多數(shù)通道的數(shù)據(jù),剔除少數(shù)通道的數(shù)據(jù),當(dāng)出現(xiàn)1:1 的數(shù)據(jù)輸出時,飛控系統(tǒng)剔除所有的通道數(shù)據(jù),此時飛控系統(tǒng)僅具備基本的開環(huán)控制能力。
2 信號處理的算法研究
本文采用的開環(huán)光纖陀螺的精度有限,在使用過程中會發(fā)生漂移。漂移是綜合誤差的體現(xiàn),主要來源于陀螺光路和陀螺電路。具體誤差源包括光路的偏振誤差、溫度引起的熱光效應(yīng)誤差、振動引起的彈光效應(yīng)誤差、調(diào)制解調(diào)誤差,電路的驅(qū)動控制模塊精度、后級輸出模塊精度等。在飛行中,當(dāng)慣測長時間工作,其四個單元的輸出誤差可能隨時間累積超出預(yù)設(shè)的四通道不一致門限從而引發(fā)故障。因此,在工程實踐中開環(huán)光纖陀螺需建立其數(shù)據(jù)的數(shù)學(xué)模型并對其進行濾波、除噪等處理,此外本文還引入了加速度信號輔助開環(huán)光纖陀螺輸出姿態(tài)角以提高導(dǎo)航系統(tǒng)的準(zhǔn)確性。
2.1 算法設(shè)計
當(dāng)直升機運動加速度較小,慣測采用重力加速度在機體系三軸向的投影來估計直升機姿態(tài)角誤差,實現(xiàn)對慣測輸出值的修正,稱該種模式為ACC 組合模式。當(dāng)慣測無法進入ACC 組合模式,其輸出精度主要取決于陀螺性能。當(dāng)直升機有運動加速度時,慣測進入ACC 組合模式后,其輸出的姿態(tài)角可能造成誤修正。因此設(shè)置了組合進入門限,門限的取值在加速度運動帶來的姿態(tài)角估計誤差與開環(huán)光纖陀螺精度差帶來的姿態(tài)角誤差之間進行了綜合考慮。通過在試驗中調(diào)整組合參數(shù),拓展組合模式適用的飛行場景,使得慣測輸出的數(shù)據(jù)更為精確。本文重點研究慣測進入ACC 組合的角速度和加速度門限。
若連續(xù)2s 均同時滿足條件1 和條件2 時,則進入ACC 組合模式,否則退出。
條件2:進入組合的加速度門限:
2.2 適用的飛行場景
本文展開分析滿足觸發(fā)直升機加速運動條件的其中一種典型工作場景,即載機沿水平方向勻加速運動載機加速時低頭,減速時抬頭。假設(shè)載機以加速度a 勻加速運動,見圖1。
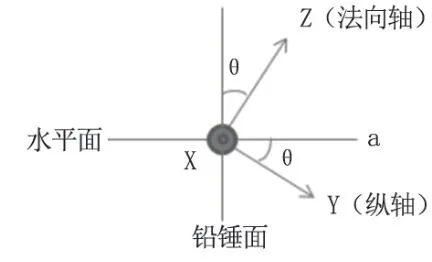
圖1 載機勻加速運動時機體軸指向
此時,載機會低頭,使得法向過載fZ在水平面的投影提供加速度a,在鉛錘面的投影抵消重力加速度g。此時X、Y、Z 加計輸出特性如下:
當(dāng)比力>0.04g 時,對應(yīng)的前向加速度的數(shù)值:
則
以前向加速度為0.286g 為例,計算俯仰角、橫滾角的修正誤差:
俯仰角計算公式:
當(dāng)a=0.286g 時,根據(jù)俯仰角計算公式,0.286g的水平加速度有可能造成俯仰角估計誤差最大值為:。
但由于直升機速度一般為200km/h ≈56m/s,地速從0 加速到56m/s 的時間為:,同時ACC 組合誤差修正方案限制了每2s 修正門限2′,所以慣測系統(tǒng)在20s 內(nèi)對俯仰角的最大誤修值為20′=0.33°。
可見,雖然水平加速度越大,姿態(tài)角修正誤差越大,同時在慣測修正時,設(shè)置單拍修正門限。因此,慣測的實際修正數(shù)值是水平加速度、單拍修正門限、修正時間綜合作用的結(jié)果。當(dāng)水平加速度為a,加速運動結(jié)束時的地速為V 時,ACC 組合造成的俯仰角最大誤修值計算公式為:
計算不同大小水平加速度a 造成的慣測系統(tǒng)姿態(tài)誤差,取a 可能造成俯仰角估計誤差和以ACC 單拍修正門限修正左列時間達(dá)到的俯仰角誤修正數(shù)值中的較小數(shù),實際俯仰角誤修數(shù)值見圖2。
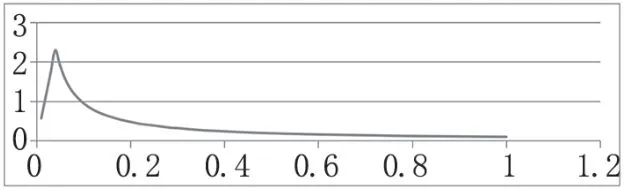
圖2 水平加速度a 造成的姿態(tài)修正誤差
實際修正誤差跟前向加速度不是線性增長關(guān)系,當(dāng)前向加速度為0.04g 時,慣測系統(tǒng)俯仰角瞬間誤修正數(shù)值最大,但不超過2.5°。
針對上述場景下ACC 組合誤修正分析結(jié)論:對于載機典型水平加速運動場景,慣測進入ACC 組合模態(tài),橫滾角不會發(fā)生誤修正;由于有姿態(tài)誤差單拍修正門限的限制,以及載機加速時間有限,俯仰角瞬間誤修正數(shù)值小于2.5°。
采用同樣的方式展開分析各種帶加速運動的典型場景,如直升機有垂向加速度且無水平加速度的運動場景等,應(yīng)選取合適的門限避免載機退出ACC 組合,且門限數(shù)值的選取應(yīng)適當(dāng)排除一些極端情況下的錯誤修正。
3 仿真結(jié)果分析
針對本文研究的飛控系統(tǒng)搭建了半物理仿真環(huán)境,在該環(huán)境中模擬直升機的飛行。搭配高精度的激光慣導(dǎo),該慣導(dǎo)可反映真實的直升機角速率及加速度,其輸出信號作為正確姿態(tài)判斷本文研究的慣測系統(tǒng)輸出值是否正常。
3.1 未進入ACC 組合模式
測試在平飛加速時的飛行工況,仿真結(jié)果如圖3、圖4 所示。
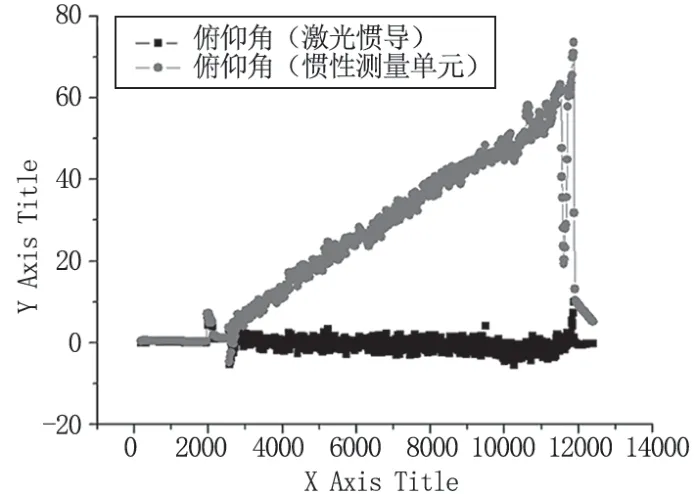
圖3 慣測系統(tǒng)輸出的俯仰角與激光慣導(dǎo)對比
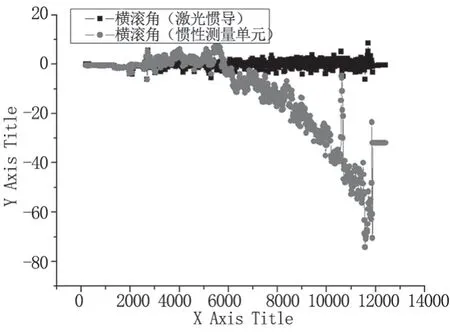
圖4 慣測系統(tǒng)輸出的橫滾角與激光慣導(dǎo)對比
可以看出:(1)與激光慣導(dǎo)相比,慣測系統(tǒng)的俯仰、橫滾誤差在導(dǎo)航后均迅速增加;(2)慣測的俯仰軸陀螺漂移約為20°/h,橫滾軸陀螺漂移約為-40°/h,可見該次飛行中慣測的陀螺漂移誤差大,在長時間飛行中誤差累積較快。
3.2 進入ACC 組合模式
測試起飛后存在水平加速及垂向加速時的飛行工況,仿真結(jié)果如圖5、圖6 所示。
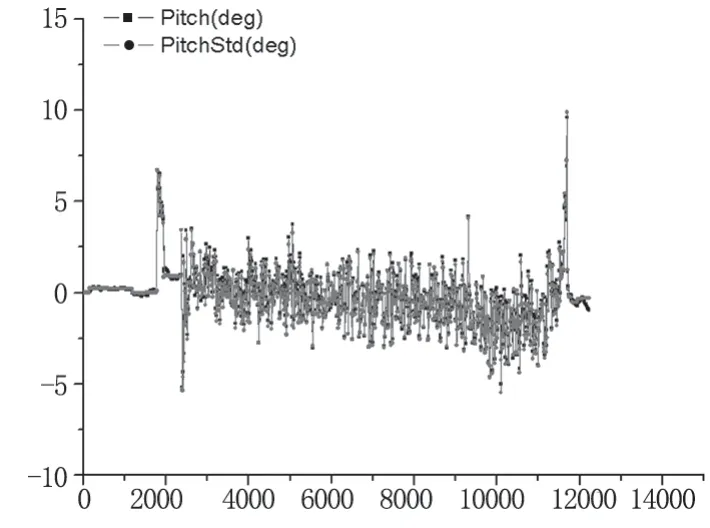
圖5 慣測系統(tǒng)輸出的俯仰角與激光慣導(dǎo)對比
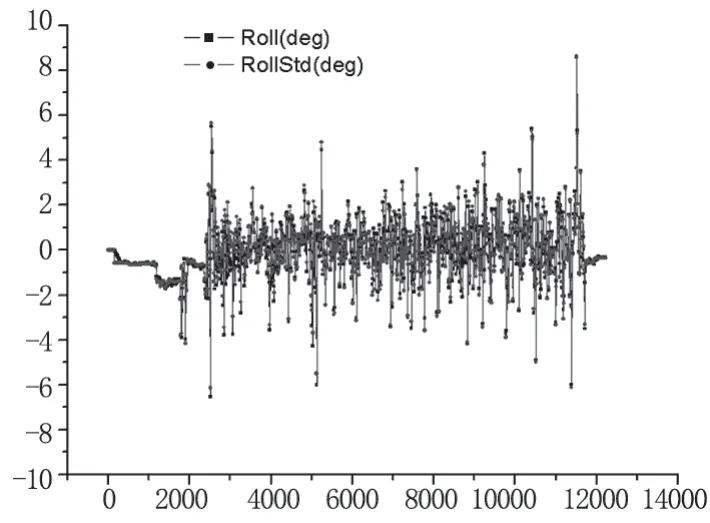
圖6 慣測系統(tǒng)輸出的橫滾角與激光慣導(dǎo)對比
以激光慣導(dǎo)輸出的俯仰角、橫滾角為基準(zhǔn),計算慣測輸出的俯仰角、橫滾角誤差分別為0.196°、0.266°,滿足飛控系統(tǒng)精度需求。
3.3 仿真結(jié)論
仿真結(jié)果表明,引入加速度計算姿態(tài)信號后,可有效提高慣測動態(tài)性能,輸出的姿態(tài)信號可滿足飛控系統(tǒng)的需求。
4 結(jié)語
飛行中,當(dāng)慣測長時間用開環(huán)光纖陀螺輸出姿態(tài)角,隨時間累積漂移誤差大,當(dāng)4 個通道輸出的信號出現(xiàn)了較大超差后系統(tǒng)就會報故障。本文引用加速度信號修正姿態(tài)數(shù)據(jù),并設(shè)置合理的進入門限,根據(jù)仿真結(jié)果,其輸出的數(shù)值滿足飛控系統(tǒng)的需求。這個結(jié)果對多余度的慣導(dǎo)系統(tǒng)有著非常重要的意義。在實際工程中,慣導(dǎo)采用多余度的開環(huán)光纖陀螺和加速度計組合輸出,既可提升系統(tǒng)的可靠性,降低部件失效概率,又能降低成本,具有很高的實用性。
