深海網箱自動投料裝置的設計與研究
2024-03-10 03:13:46張益鵬史曉敏董帥喜
中國設備工程 2024年4期
張益鵬,史曉敏,董帥喜
(浙江海洋大學海洋工程裝備學院,浙江 舟山 316022)
1 前言
我國沿海地區擁有較多的海產資源,但是由于對海產的過度捕撈,導致海產資源嚴重短缺,海產的供給日益依賴海水養殖。但目前,我國近海海域的資源開發利用已經接近飽和,養殖方式的粗放導致了環境惡化、污染加劇、疾病增加、養殖生物品質降低等一系列問題,預示著近海海水養殖已經走到了發展的極限。挪威是國外深水網養魚的典范,我國自“十五”以來,國家及各級政府都大力引進、吸收、發展深水網養魚,山東、浙江、廣東、海南都有較多的成功案例,這使得深水網養魚技術已成為水產養殖的發展方向。
與傳統的網箱養殖業相比,該產業具有顯著的經濟和生態效益,并可在沿海地區開辟出一片可供臨海工業、倉儲物流和沿海旅游的區域。而深水網箱產業又是一個龐大的系統工程,其所承載的產業集群也是一個龐大的系統工程。深水網箱設備覆蓋了網箱材料、加工制造、機電設備等行業,深水網箱養殖將對水產品加工流通、苗種培育、餌料生產、病害防治以及休閑旅游等各個領域產生輻射效應。全面發展深水網箱,是轉變漁業經濟發展方式的重要途徑,它是提高我國漁業工業的核心競爭力、引導漁民增加收入的一條重要途徑,也是改善海洋生態環境的一條重要措施。
2 裝置總體結構設計
2.1 總體結構
本裝置由自動放料裝置和儲料底盤兩大部分構成,儲料底盤是由浮力底盤支撐,自動放料裝置通過四周調節桿和支架與儲料底盤連接。儲料筒存儲需要投喂的飼料,儲料筒頂部固定有筒蓋,筒蓋頂部通過電機罩固定有電機,內腔連通的排料管上安裝有料口控制器,出料結構中下料管擴散并傾斜向下設置能夠將排除的飼料均勻地擴散到養殖水面上,增加飼料分布的面積,避免養殖的魚類處于較為擁擠的環境中進食,料口控制器通過內置電機從下料管出料,與此同時,飼料殘渣收集結構開始工作,氣泵向浮力橡膠球囊通入空氣,使得支撐桿向上浮起,從而帶動支撐桿的攔截網向上傾斜,使得在喂食時產生的飼料殘渣和魚類產生的糞便能夠在攔截網的作用下限制在一定范圍內,避免飼料大范圍擴散造成海水的污染,并在殘渣過濾結構的作用下抽離海水,經過過濾處理后便于集中處理,降低對海水的污染,提高環保效果。
深水網箱自動投料裝置整體結構如圖1 所示。

圖1 總體結構設計
2.2 投料原理
當前,市場上出售的裝置魚餌投放模式主要有三種:電磁振動投放模式、機械振動投放模式和渦輪蝸桿投放模式。但是,電磁型的穩定性較差,精度較低,而且由于受深海養殖環境的制約,經常變換也不方便;蝸桿驅動的蝸輪型結構比較復雜,造價比較昂貴,而且很難維修。
因此,本裝置采用下料方式選擇電機氣泵氣壓式出料,使氣壓遠大于水壓的阻力,從而使餌料精準壓進網箱,減少餌料因為水壓而浪費,提高餌料的利用率,并且能夠在水箱里儲存多余餌料以便回收,減少餌料污染水質。
2.2.1 飼料數量估算
深海網箱養殖由于養殖區域在遠離海岸的海中,增加了飼養難度。利用自動投料控制系統,可以對遠離海岸的網箱進行投料,促進遠海網箱養殖的發展。在大規模網箱養殖中,采用自動投料設備優化投料方式,解決人工投料勞動強度大、效率低、成本高、精度低、可靠性低等問題。因此,自動投料技術在開闊海網箱養殖收益中起著關鍵作用。飼料是水產養殖中最重要的可變成本,一般占水產養殖總成本的50%~80%。養殖管理的一個重要方面是通過減少飼料浪費和節約成本,將飼料成本降至最低。
以大黃魚為試驗對象,試驗采用了70m 的圍網、水深15m 的網箱。設置投餌密度70g/30 尾/m2,由于幼苗期是黃魚采食量最大的時期,所以一天應投喂4 次左右的人工配合飼料,并且投餌量應按大黃魚的體重而定,通常魚苗期的投餌率為1.0%~1.3%,每網箱設置2 臺投餌機。
查閱相關數據知,市面上最常見的魚飼料的比重約為394kg/m3,設料箱半徑為r,高為h,則由公式:
可以算出,一個網箱每周的投料量應該在這個數量左右:
2.2.2 氣泵風機選擇
性能要求:試驗投料距離定為,其最大投料量定為。輸送物料量Gb是輸料管單位時間內通過的最大輸送量,所以輸料量Gb需要在平均輸送量的基礎上加上一定余量。如下:
輸送氣流速度的選擇上,相對粒度均勻的物料,一般取懸浮速度的1.5 ~2.5 倍。
輸送濃度為單位時間內通過輸料管某一截面物料的重量Gs 和空氣重量(Ga=γaG)的比值。
式中,Gs為物料重量(kg/h);Ga為空氣重量(kg/h);γa為空氣重度(kg/m3);Q 為空氣流量(m3/h)。
管道總壓損主要包括水平管沿程靜壓損、加速壓損和局部壓縮,計算如下:
送料水平沿程靜壓損,由達西公式:
在流體力學理想流體微分形式的伯努利方程式中,加入能量損失一項就得出氣體在管道內流動的微分形式的伯努利方程,即為:
鼓風機的類型一般有羅茨風機和高壓漩渦風機兩種,其中羅茨風機雖然可以固定輸出風量不隨負載變化而變化,但其缺點是笨重不易挪動。而高壓漩渦風機可以滿足要求且其輕便易于搬運與使用,缺點是風量會隨著負載變化而變化。而本裝置平臺未來是搭建在投餌裝置上,重量過大不利于裝置運行,所以選用輕巧的高壓漩渦風機。根據設計參數,選用亞士霸電機,型號HG-3800S,額定電壓380V,最大風壓42kPa,最大吸壓38kPa,最大風量400m3/h,噪音70 分貝,風管口徑60mm。
2.3 自動放料結構
自動放料系統就是送料軸和控制器相結合的系統。首先,使飼料進入儲料筒的底部,由電機罩下的電機轉動帶動送料軸外圓的螺旋輸送扇葉機械的轉動,來控制行程,這種傳動結構簡單,維護方便,且在儲料筒應用中狀態穩定,同時自動控制箱控制料口控制器,使料從排料管與支撐盤頂部軸心處開設的通孔有序地自動流入支撐盤底部,從而能夠定時定量地輸送所需要的飼料,降低人工勞動強度,提高飼料投喂效率。
3 傳感器系統設計
水環境監測主要是指利用現代監測手段(在線遠程監測設備、浮標、水下機器人、無人機等)獲取公海網箱所在區域的水文、水質信息,包括近海風速和風向、浪高、洋流速度等。水文參數、水溫、pH 值、溶解氧、亞硝酸鹽、氨氮、葉綠素等水質參數進行實時監測,并從實時獲取的數據中分析水質參數的變化,解決了傳統的開闊海網箱養殖水質監測方法無法動態反映水質變化的問題,實現了開闊海網箱養殖區域無人值守作業的目標,使漁民可以在遠程監控室中隨時獲取明海網箱養殖區域的水文和水質參數。
傳感器系統是本裝置的關鍵部分之一,主要由水質傳感器、溫度傳感器和魚類生長傳感器組成。
3.1 水質傳感器
水質傳感器裝在浮力底座的前端,并固定在靠近水面的位置,它使用了光學傳感器和電化學傳感器的組合,其中光學傳感器是通過測定水體中的光強來測定溶解氧和濁度,而電化學傳感器是通過電極對水體中的離子濃度來測定pH。該系統可為水產養殖系統的智能化控制提供依據,確保水產養殖系統的穩定性與安全性。
3.2 溫度傳感器
在溫度傳感器方面,將熱敏電阻器與溫度傳感器芯片結合在一起,可以對水溫進行實時監控。安裝在網箱的四壁上,可以方便地獲取更加精確的水溫數據,這些傳感器可以提供精確的水溫數據,為裝置的智能控制奠定了基礎,確保魚類獲得了一個良好的生長環境。
3.3 魚類生長傳感器
在網箱底部設置了一個魚體長徑儀,該儀器利用水壓和感光兩種傳感器,實現了對魚體長和魚體寬的監測。在喂魚裝置中,魚兒在網箱中來回穿梭,通過水壓和感光傳感器,監測魚兒的個數、群數等信息。該系統可為裝置的智能化控制提供可靠的依據,以確保魚體在合適的飼養環境中獲得足夠的營養。
4 自動化控制系統的設計
4.1 PLC 與單片機的選擇
PLC 等同于一種控制設備,主要是通過控制控制領域的梯形圖編程,例如數控制機床、電梯等。單片機在工業過程控制,過程監測,工業控制器和機電整合控制系統中被廣泛使用。從工程的角度來看,對于少數重復或單個項目,環境要求不高,可以使用可編程控制器,方便且快速,成功率很高,具有可靠性,但成本相對較高。如果它是相對較大的支持項目或大型項目,則施工單元可以考慮使用單片機,不僅降低成本,而且還可以使用高效率。
4.2 單片機控制
4.2.1 硬件選擇
AVR 單片機是在最近十幾年發展起來的一種新型單片機。從運行速度、存儲空間、內部功能模塊的整合、以串行接口為基礎的外部擴展等各方面來看,AVR 單片機都要優于51 單片機。
4.2.2 控制面板設計
為了方便用戶對深海網箱自動投餌裝置進行控制和監測,我們設計了一塊控制面板(圖2)。該面板包括液晶顯示屏、按鍵、LED 指示燈等元件,用戶可以通過按鍵設置投餌時間、投餌量等參數,并實時監測系統狀態。
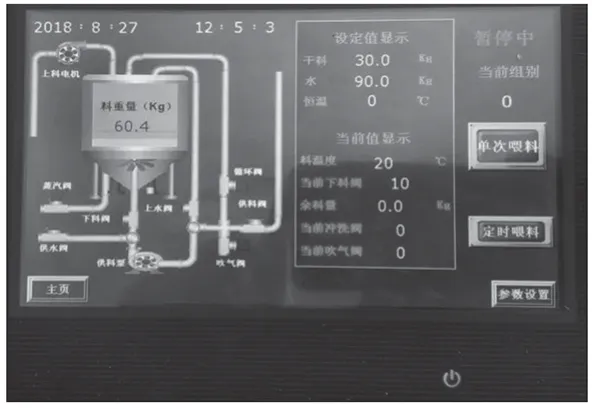
圖2 控制面板設計
(1)按鈕。打開后液晶顯示屏啟動,會將整套系統的信息顯示在屏幕上,再按則關閉。“LED0”亮滅分別對應打開與關閉。
(2)參數設置。按下,系統依次進入設置狀態,此時,整套系統的參數都在等待使用人修改。
(3)單次喂養。按下后,可以根據參數設置中設置每次投餌的量進行單次的投喂。
(4)定時喂養。按下后系統將按照參數設置中設置的參數進行自動投料,可以在無人的情況下進行作業。
(5)主頁。在其他頁面按下主頁鍵后可以返回本頁面。
4.2.3 控制邏輯
(1)系統初始化,讀取用戶設置的參數。
(2)檢測水溫、水質等環境參數,判斷是否需要投餌。
(3)根據用戶設置的投餌時間和投餌量,控制繼電器開關,實現自動投餌。
(4)投餌完成后,等待下一次投餌的觸發。
5 結語
通過深海網箱養殖自動投料設備的研究,本文研究設計了一種適用于深海網箱養殖的自動投料裝置,利用單片機、傳感器等技術手段實現了水文環境以及對魚群的檢測并可以自動化投料的功能。理論上,該系統表現出了優良的可靠性和實用性,可以適用于不同深海網箱養殖的工作要求。未來的工作,可以進一步對該設備進行優化,從而更好地滿足深海網箱養殖的需求,進而能夠最大化地提高養殖戶的收入,大大保障了飼養人員的人身安全。
猜你喜歡
環境(2023年5期)2023-06-30 01:20:01
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
當代水產(2019年1期)2019-05-16 02:42:04
當代水產(2019年3期)2019-05-14 05:42:48
電子制作(2018年14期)2018-08-21 01:38:16
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
水利規劃與設計(2016年7期)2016-02-28 15:06:27
