基于聲陣列的電力設備強干擾噪聲源識別系統設計
2024-03-11 01:52:00范麗君陳冠袁輝郁嘉毅陳雅藍
電子設計工程 2024年5期
關鍵詞:電力設備
范麗君,陳冠,袁輝,郁嘉毅,陳雅藍
(國網上海市電力公司嘉定供電公司,上海 201800)
電力設備運行中的噪聲包含大量的工作環境數據,為了保證其穩定運行,需要準確分辨電力設備運行監測數據。將電力設備在正常工作情況下的噪聲數據視為基線,把監測數據信息和該基線信息加以對比,即可檢測出電氣設備的狀態和噪聲源,但在強干擾下的電力設備噪聲源識別效果較差。
針對噪聲源識別問題,許多學者進行了研究。文獻[1]根據噪音測試得出噪音水平分布云圖和幅頻特性曲線,確定張緊器對同步帶傳動系統噪音的干擾規律,完成對噪聲源的識別,但此方法對于噪聲源同步要求較高,識別視角較長。文獻[2]提出等效源法理論辨識噪聲源,根據管側的剛性邊界狀態,構造Green 參數,完成對噪聲源的辨識,但是識別魯棒性較差。針對上述問題,該文基于聲陣列設計一種電力設備強干擾噪聲源識別系統。
1 系統總體設計
1.1 系統技術要求
1)系統利用采集器采集噪聲信號,配合參考信號與線性陣列上的傳聲器共同采集信息。
2)信號采集時產生的速率、時長以及傳聲器通道號通過處理器進行分析,并填入數據文件中,線性陣列產生的傳聲器通道號需按次序導入數據文件中。
3)通過分析器進行聲源定位。
1.2 系統結構
通過聲陣列技術中的線性傳聲器陣列結合采集器測量采集數據,陣列中含有傳聲器以及變壓器,變壓器的外表具有與陣列平行的全息測量面,陣列在其中進行等間距的橫向移動[3-4]。陣列中的處理器將所有全息測量面輸出為頻域信號,以此完成對整個采集過程的處理,并傳輸至分析器中。系統總體結構如圖1 所示。
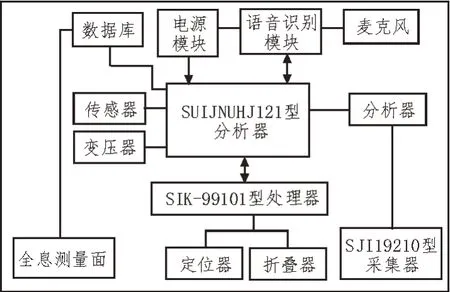
圖1 識別系統總體結構
根據圖1 可知,SUIJNUHJ121 型分析器為核心設備,將50 Hz 設定為固定分析頻率[5-6],通過聲場重建定位聲源位置,分析噪聲源。
2 系統硬件設計
2.1 采集模塊
該文采用SJI19210 型采集器作為基于聲陣列的電力設備強干擾噪聲源識別系統的噪聲采集器,該采集器含有一個參考傳聲器,負責采集參考信號[7]。SJI19210 型采集器結構如圖2 所示。
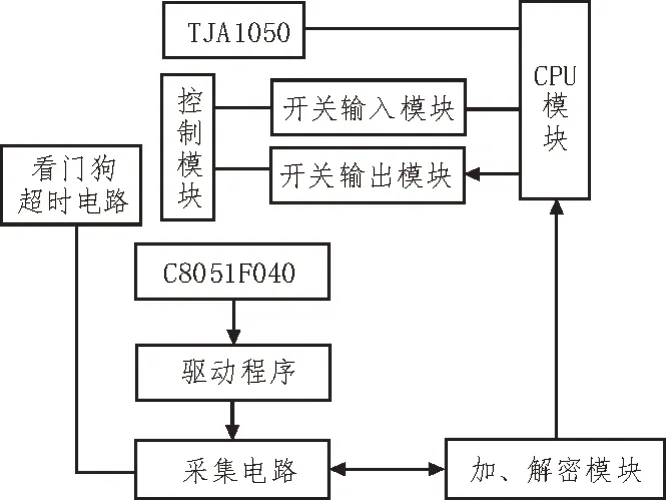
圖2 SJI19210型采集器結構
根據圖2 可知,采集器主要含有看門狗超時電路和采集電路兩種電路,內部設定加密模塊和解密模塊,噪聲信號的采集方式為陣列移動測量方法。在陣列移動時通過采集器對其實時采集,當陣列從全息面完全經過后,結束采集。在采集過程中需設定采集量固定值,通過全息面中心的正對位置坐標設定,該坐標與全息面中心位置的距離為固定值[10-11]。
2.2 處理模塊
處理模塊選用的處理器為SIK-99101 型,其主要功能為對處理器的噪聲信號進行處理,由于對于噪聲信號的采集為實時移動采集,因此需要預處理采集信號,得到二維時域信號[12]。
利用掃描修正因子修改傳感器輸出的記錄信息相位,將掃描點恢復到初始位置,在采樣過程中獲得的一維空間時域信號需要排序組合,組合方式為空間順序組合[13]。
2.3 分析模塊
該文系統分析模塊采用的是SUIJNUHJ121 型分析器,該分析器含有一個進場聲全息分析模塊,其主要用于存放全息測量數據。分析器將傳聲器間距填寫至進場聲全息分析模塊中,得到分析頻帶固定值。模塊中的橫向間距為線性陣列傳聲器橫向移動產生的空間長度,縱向間距為傳聲器之間的距離,為固定值。通過以上數據可得到全息測量面的詳細數據[14]。
3 軟件設計
3.1 噪聲分析程序
電力設備含有的各類驅動裝置非常復雜,產生的噪聲源主要分為三類:嚙合沖擊噪聲、橫向振動噪聲、張緊器噪聲。因此,電氣裝備傳動系統噪音原因十分復雜,該文設計噪音分析程序分析電力設備強干擾下的傳動系統的噪音形成。
3.1.1 嚙合沖擊噪聲
電力設備在強干擾下的運行中嚙進、嚙出的過程中,其帶齒與輪齒沖擊產生的齒合力逐漸形成了嚙合沖擊噪聲。嚙合沖擊噪聲的噪聲源為主動輪與從動輪之間的合力點,該噪聲為重點噪聲源,嚙合頻率為:
其中,a表示主動輪旋轉速度;Q表示主動輪圈數[15-16]。
3.1.2 橫向振動噪聲
在電力設備強干擾下,同步帶傳動過程的側向振動會形成振動噪音。當嚙合力頻率和同時帶固定頻段相互耦合時,同步帶也會形成強烈上升的共振噪音,共振噪音大多聚集在帶段跨度上,形成共線聲源。側向振動的固定頻段計算公式為:
其中,L表示同步帶長度;E表示同步帶剛性程度;T表示張緊力大小;P表示同步帶密度系數;n表示同步帶傳動次數。
電力設備強干擾會對變速控制系統造成影響,拉緊器的增加減少了帶段長度,也因此增加了帶段的固定頻次,改善同步帶傳動系統中共振噪音的產生頻率,利用拉緊器減少正時連續傳動控制系統中怠速時的共振噪音。
3.1.3 張緊器噪聲
電力設備的張緊器在運行中,張緊輪、簧片和滾動軸承等組成部件均會直接產生噪聲。而在驅動過程中,張緊器將不斷與同步帶的背接觸物摩擦,并因回轉時阻尼效應而形成反向摩擦,從而形成摩擦噪音。為了提高傳動過程中同步帶的張緊力,空氣彈簧會不斷對同步帶施以刺激,這種激勵使得張緊器發生巨大振動噪音;如果張緊器是回轉體,當其內軸承在高速旋轉的時候,隨著滾動物體的軸承類型內圈振動而產生巨大振動噪音,由此產生了張緊器噪聲。
3.2 聲陣列識別程序
在分析噪聲源后,可得知在電力設備強干擾下的驅動過程中,會出現嚙合的噪音、橫向擺動噪音以及由張緊器所產生的噪音等,而這種噪音的發聲源部位也不一致。
為識別不同聲音源的產生部位及其傳播特性,必須采用聲陣列檢測方法對電力設備強干擾下的傳動系統的噪音源加以辨識。因此設計聲陣列識別程序,當聲音信號源到平面上傳感器之間的距離滿足式(3):
其中,l表示聲陣列排列長度;λ表示聲波波長;r表示聲波半徑。
分析聲音信息在平面傳感器的衰減情況,使用近場聲全息模型來研究噪聲信息的傳遞,近場聲全息方法主要包括水平近場聲全息、柱體近場聲全息和球面近場聲全息。
采用共軛原理將一個聲源數據轉換為實數,由于最后聲音源點均被作為可疑的聲音源點對待,使得每一次被掃描的聲音源點都有機會對其中聲音源點產生干擾,通過導向因子把聲壓傳感器中虛擬信號轉換成經過調整后的中間聲源位置,把聲壓傳感器虛擬方程代入中間聲源點得到噪聲源,計算公式如式(4)所示:
其中,Y(e)表示檢測到的噪聲源;e表示最終掃描因子;Xm表示聲壓傳感器虛擬方程;m0表示中間聲源點的值。由此可得出電力設備強干擾噪聲源的最終識別源,完成了基于聲陣列的電力設備強干擾噪聲源的識別。
4 實驗研究
4.1 實驗設置
為了驗證該文提出的基于聲陣列的電力設備強干擾噪聲源識別系統的實際應用效果,將文獻[1]方法和文獻[2]方法作為對比方法設定實驗。實驗選用的電力設備為三相異步電動機,其功率為20 kW,工作轉速最大可以達到2 000 r/min。實驗使用的傳感器測量范圍最高可以達到100 kHz,采用的聲壓傳感器為2×4 模式傳感器,傳播距離為200 mm。
利用三種方法分別識別橫向共振噪聲源、張緊器噪聲和嚙合沖擊噪聲源。根據識別結果檢測噪聲,計算識別精度,計算公式如式(5)所示:
其中,h表示識別精度;c表示識別的正確數據源;ε表示識別的錯誤數據源。
4.2 實驗結果分析
1)橫向共振噪聲源識別
橫向共振噪聲源波動結果如圖3 所示。

圖3 橫向共振噪聲源波動情況
根據圖3 的橫向共振噪聲源波動情況,判斷三種方法的波動識別準確率,如表1 所示。
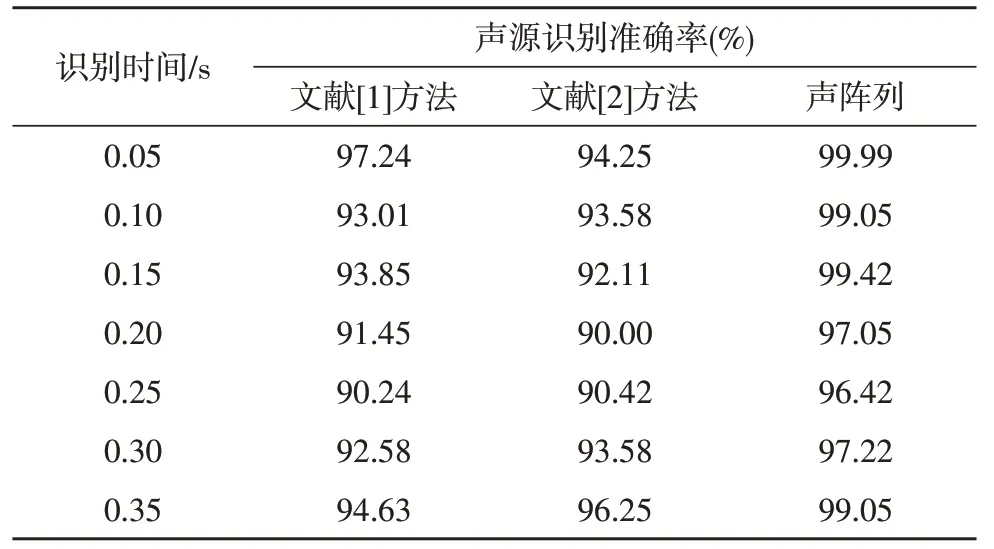
表1 橫向共振噪聲源識別準確率
共振噪聲源產生的噪聲波動較小,運行過程相對穩定,觀察表1 可知,三種方法的識別效果相對較好,但是在峰值識別問題上,該文設計的識別系統識別能力優于文獻[1]方法和文獻[2]方法,識別精度高于96.42%,最高可達99.99%,能夠保證電力設備正常運行。
2)張緊器噪聲源識別
張緊器噪聲源波動結果如圖4 所示。

圖4 張緊器噪聲源波動情況
根據圖4波動情況,得到波動準確率如表2所示。
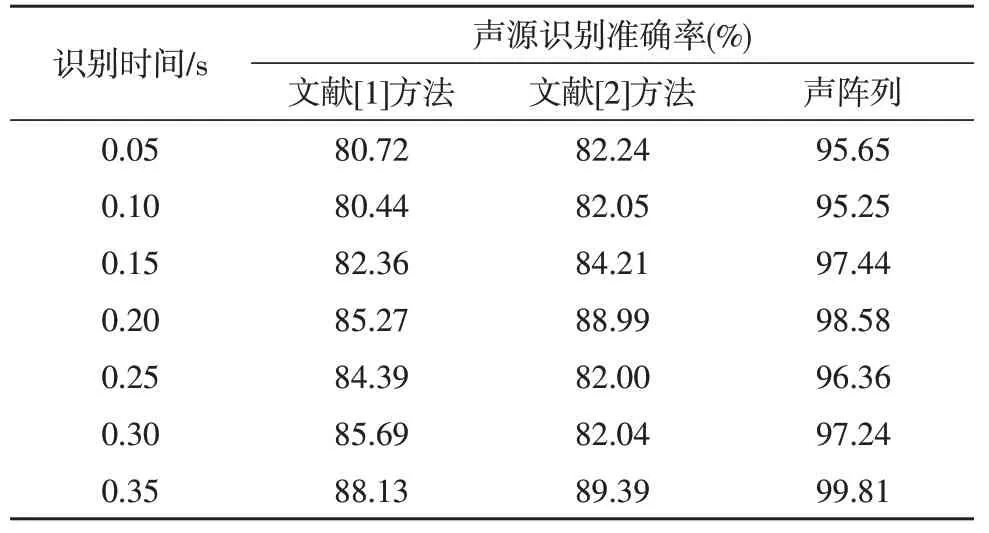
表2 張緊器噪聲源識別準確率
根據表2可知,張緊器波動狀態不穩定,聲壓級信號會對電力設備產生較強的干擾。文獻[1]方法和文獻[2]方法具有極大的局限性,無法準確識別噪聲源,但是該文設計系統識別精度仍然可以達到95.25%。
3)嚙合沖擊噪聲源識別
嚙合沖擊噪聲源識別實驗結果如圖5 所示。
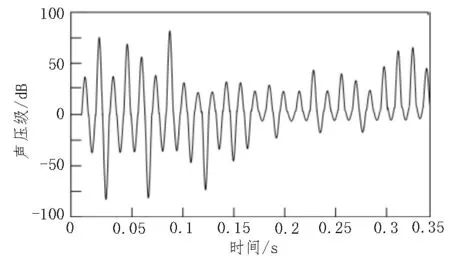
圖5 嚙合沖擊噪聲源波動情況
根據圖5波動情況,得到波動準確率如表3所示。
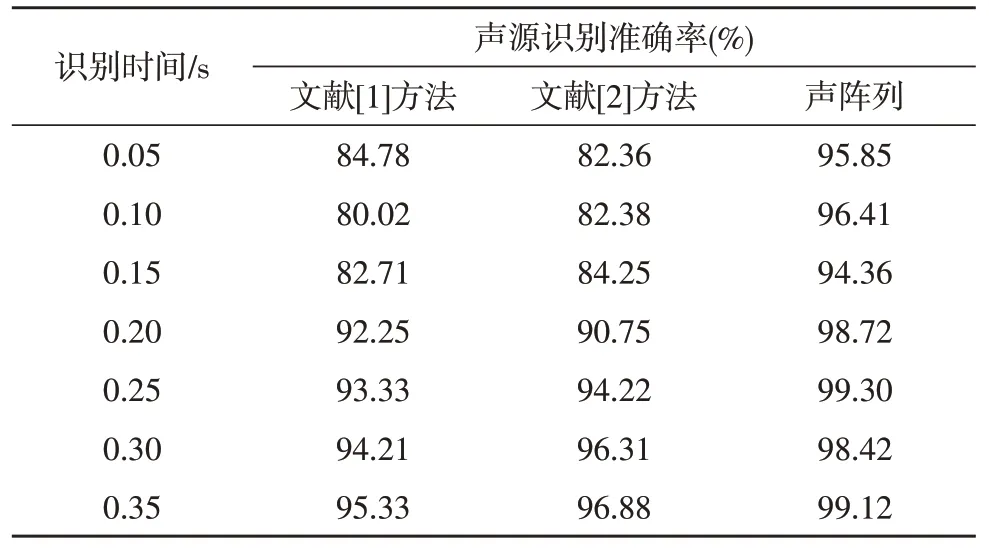
表3 嚙合沖擊噪聲源識別準確率
根據表3 可知,嚙合沖擊聲波波動相對不平穩,因此對比方法識別過程容易受到外界因素影響,設計系統識別能力更強,識別效果更好,能夠精準地判斷噪聲波動情況。
5 結束語
該文采用聲學陣列技術,設計電力設備強干擾噪聲源識別系統。在硬件結構優化的基礎上,分別設計噪聲分析程序和聲陣列識別程序,進一步優化噪聲源識別效果。性能測試表明,該系統可以實現對噪聲源的有效辨識。
猜你喜歡
電力設備管理(2023年3期)2023-07-28 11:58:43
中國設備工程(2023年24期)2023-02-01 04:00:34
公民與法治(2022年5期)2022-07-29 00:48:10
江蘇安全生產(2020年7期)2020-09-04 09:34:58
科技創新導報(2020年3期)2020-05-06 09:08:32
經濟技術協作信息(2018年22期)2019-01-19 03:00:02
電子測試(2017年15期)2017-12-18 07:19:48
現代工業經濟和信息化(2016年22期)2016-08-23 11:55:50
電測與儀表(2016年18期)2016-04-11 11:29:34
電源技術(2015年2期)2015-08-22 11:28:24
