無人化橋式起重機檢驗方案研究*
2024-03-13 10:01:48張衛(wèi)斌陸順峰王朱濤
起重運輸機械 2024年2期
關鍵詞:系統(tǒng)
王 栓 張衛(wèi)斌 張 勇 陸順峰 王朱濤
1 江蘇省特種設備安全監(jiān)督檢驗研究院 蘇州 215600 2 江蘇沙鋼集團有限公司 蘇州 215625
0 引言
市場監(jiān)管總局印發(fā)的《特種設備安全與節(jié)能事業(yè)發(fā)展“十四五”規(guī)劃》指出,要切實提高特種設備安全監(jiān)管效能,加快起重機械損傷感知與健康監(jiān)測技術創(chuàng)新。無人化起重機在國內(nèi)的探索與研究正在開展,工信部建設智能制造標準試驗驗證公共服務平臺(5G 新一代信息技術與鋼鐵行業(yè)融合)項目明確提出,要制定《智能制造 鋼鐵行業(yè) 無人化起重機通用技術要求》。因此,無人化起重機的開發(fā)與應用是國家鼓勵發(fā)展的研究方向。但是,納入《特種設備目錄》的起重機械是國家要求進行強制監(jiān)管的特種設備,其安裝、改造、維修均屬于行政許可項目,如何使無人化起重機合規(guī)、合法地開展成為當前亟需解決的問題。本文結合TSG Q7016《起重機械安裝改造重大修理監(jiān)督檢驗規(guī)則》和制定中的《智能制造鋼鐵行業(yè) 無人化起重機通用技術要求》對無人化橋式起重機的檢驗方案進行研究,希望能對無人化自動起重機的規(guī)范化、標準化有所幫助。
1 相關法規(guī)標準的要求
隨著微電子、大規(guī)模集成電路技術的不斷成熟,在惡劣工作環(huán)境下實現(xiàn)橋式起重機的無人化運行的問題已具備解決的條件,推進橋式起重機無人化進程已成為橋式起重機發(fā)展的重要工作[1]。針對橋式起重機的無人化改造項目,當前需要參照的相關法規(guī)標準如表1 所示。
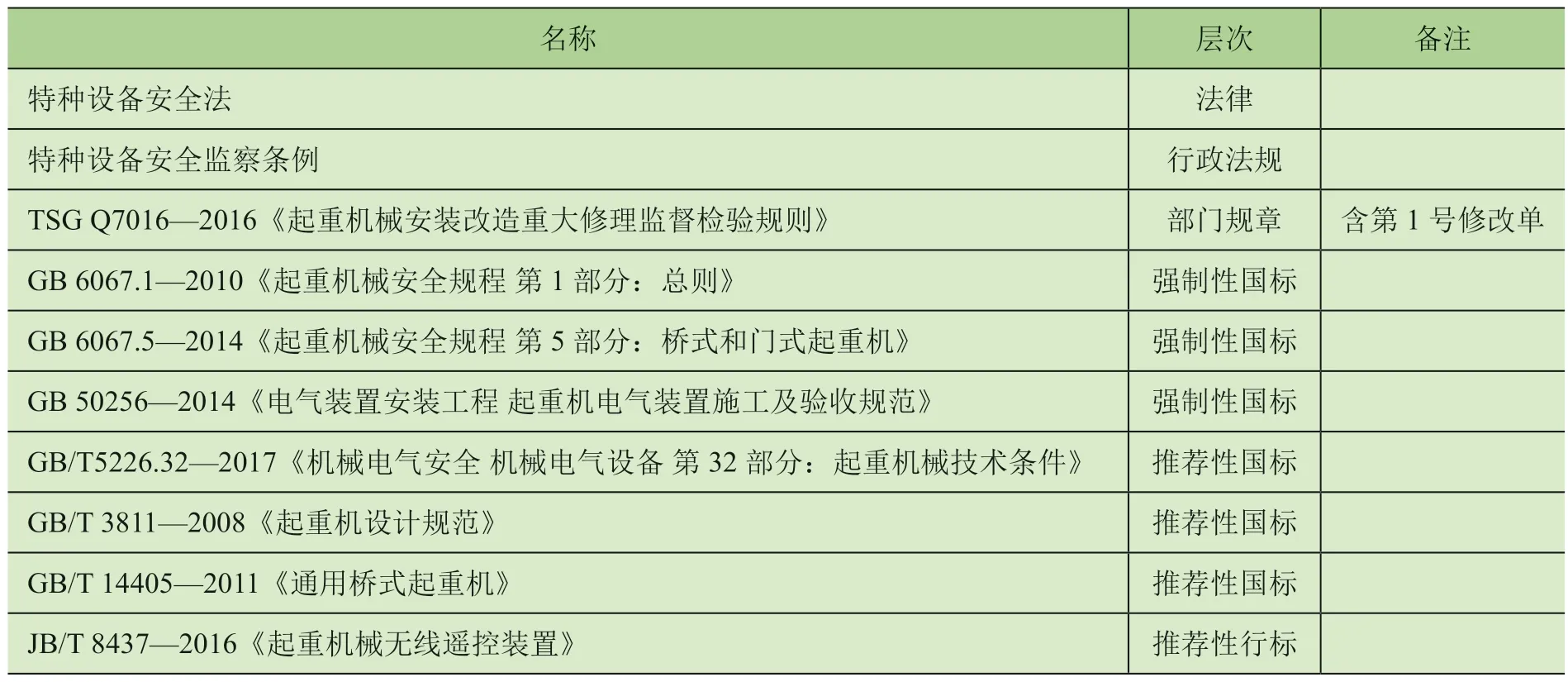
表1 無人化起重機改造相關標準
在表1 所示法規(guī)標準中,TSG Q7016—2016《起重機械安裝改造重大修理監(jiān)督檢驗規(guī)則》(含第1 號修改單)和GB 6067.1—2010《起重機械安全規(guī)程 第1 部分:總則》對橋式起重機無人化改造項目的安全保護有較高相關性。本文將主要以上述2 個法規(guī)標準為基礎結合無人化起重機安全策略設置要求對無人化橋式起重機的檢驗方案進行研究。無人化橋式起重機如圖1 所示。

圖1 運行中的無人化橋式起重機
2 無人化橋式起重機檢驗方案
本文以某冷軋板軋后庫8 臺通用橋式起重機為對象,研究其無人化改造項目檢驗。軋后庫是鋼板冷軋等待并進行后繼深加工的中間庫區(qū),軋后庫的8 臺橋式起重機械是冷軋鋼卷存卷、挪庫及深加工的重要生產(chǎn)設備,在該庫區(qū)的使用工況為加工設備、物流車輛、人員作業(yè)等,以實現(xiàn)橋式起重機的自動操作,不僅可以解決勞動力的短缺,還可以保障從業(yè)者在惡劣工作環(huán)境下的人身安全,故實現(xiàn)橋式起重機的無人化迫在眉睫[2]。
1)軋后庫基本情況
該冷軋板軋后庫共有2 跨,其中北跨有5 臺橋式起重機,南跨有3 臺橋式起重機,共8 臺橋式起重機。庫區(qū)涉及4 個過跨車、5 個步進梁、3 個汽車運輸線、2個打包區(qū),庫區(qū)布置如圖2 所示。
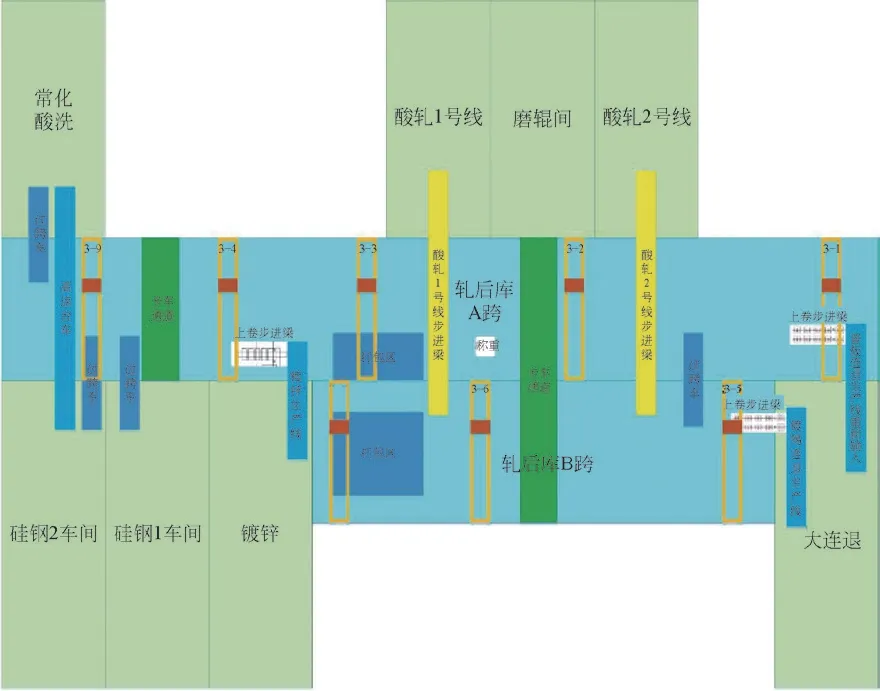
圖2 軋后庫布置圖
無人化橋式起重機自動控制功能包括操作方式、起重機本體自動控制系統(tǒng)、傳動控制系統(tǒng)、定位控制系統(tǒng)、防碰撞系統(tǒng)、吊具控制系統(tǒng)、防搖擺控制系統(tǒng)和數(shù)據(jù)系統(tǒng)等,可實現(xiàn)起重機無人駕駛、精準定位、自動吊放鋼卷等功能。通過對起重機進行無人化改造,使其具有自動、遙控、司機室等3 種操作模式。
2)起重機本地自動化系統(tǒng)
對所需改造的起重機進行本體自動化改造,新增安全型 PLC,系統(tǒng)以主從結合,全部采用以太網(wǎng)通訊方式。具體改造是在起重機電氣室布置控制器,在司機室、夾鉗信號柜內(nèi)布置遠程 I/O,以減少起重機連接電纜,滿足無人化起重機的高可靠性控制要求,降低線路故障排查工作,減少電纜的維護[3-6]。
根據(jù)起重機械使用單位的技術要求,結合軋后庫自身特點、無人化起重機系統(tǒng)構架圖(見圖3),在詳細了解現(xiàn)場起重機械及庫區(qū)物流流程的基礎上,參照TSG 7016—2016《起重機械安裝改造重大修理監(jiān)視檢驗規(guī)》、GB 6067.1—2010《起重機安全規(guī)程 第1 部分總則》相關規(guī)定,對軋后庫起重機械無人化改造項目的8 臺通用橋式起重機制定了檢驗方案。
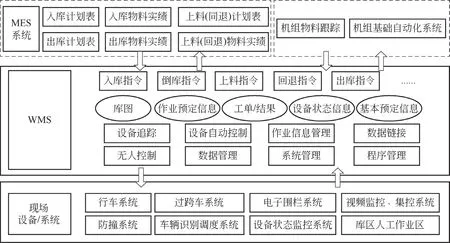
圖3 無人化起重機系統(tǒng)架構圖
2.1 技術資料
技術資料審查分為設計文件、出廠資料和管理制度等3 部分。這些資料可以確保無人化系統(tǒng)的功能設計、現(xiàn)場調(diào)試及使用維護有健全的制度保障。設計文件需要提現(xiàn)該系統(tǒng)的完整功能需求、技術說明書、設計圖樣(電氣原理圖)等內(nèi)容;出廠資料需提供系統(tǒng)的合格證明文件、出廠檢驗文件、安裝調(diào)試說明書、使用維護說明書等;管理制度方面需要使用單位制定了包含無人操作起重機的使用管理規(guī)定、日常巡檢規(guī)定、維護保養(yǎng)規(guī)定、故障應急預案規(guī)定等內(nèi)容在內(nèi)的管理制度。
2.2 地面管理子系統(tǒng)
1)權限分級
地面管理子系統(tǒng)需要有相應的權限分級,客戶端操作界面設置登錄管理,操作權限進行分組管理。權限由低到高分別為只讀權限、可操作權限、可配置權限、廠家權限等。只讀權限用戶只能查看設備、作業(yè)、配置等信息,不能修改;可操作權限用戶可以切換設備模式、調(diào)整作業(yè)順序和內(nèi)容,但不能進行配置;可配置權限除了有操作權限外,還可對庫管系統(tǒng)進行配置,如修改作業(yè)優(yōu)先級、修改作業(yè)范圍、修改垛位禁用、增加卡車二維碼信息等;廠家權限包含所有權限,以便于廠家進行維護和升級。
子系統(tǒng)的操作和管理權限應分級,并由經(jīng)過授權的人員進行授權才可切換。
2)操作模式
根據(jù)庫區(qū)及起重機的工況,無人化橋式起重機應具備司機室駕駛模式、遙控模式和自動模式3 種模式。優(yōu)先級從高到低依次為司機室駕駛模式、遙控模式、自動模式。在投入自動模式時,需地面監(jiān)控人員確認,起重機才可自動執(zhí)行指令;應配置顯示屏或指示燈,明確指示當前起重機的作業(yè)模式和工作狀態(tài)(如自動、空操、遙控等)。
系統(tǒng)應具備司機室駕駛模式(若有司機室)、遙控模式和自動模式3 種模式。優(yōu)先級從高到低依次為司機室駕駛模式、遙控模式、自動模式。控制模式根據(jù)優(yōu)先級互鎖,即優(yōu)先級較高的控制模式運行時起重機不接收優(yōu)先級較低的控制模式的控制信號;優(yōu)先級較高的控制模式可在優(yōu)先級較低的控制模式運行期間切入,反之不可。
3)報警裝置
子系統(tǒng)應設置聲光報警裝置,以確保起重機發(fā)生故障時向系統(tǒng)監(jiān)視人員發(fā)出清晰的聲光報警。
4)緊急停止裝置
子系統(tǒng)應設置緊急停止裝置,該裝置可切斷起重機械的動力電源,且不能自動復位。
5)文字表達形式
系統(tǒng)顯示的文字應為簡體中文。
6)無人起重機作業(yè)區(qū)域
無人起重機作業(yè)區(qū)域應有明顯標志與限位開關或電子圍欄裝置(見圖4),人員進入應有報警。
7)系統(tǒng)畫面顯示
系統(tǒng)畫面顯示有起重機械動畫示意顯示,與起重機械位置相符;吊具開閉、旋轉(zhuǎn)狀態(tài)指示;起重機械每一步運行的指示;起重機械位置值顯示;吊具的高度值顯示;起重機械是否具備自動工作條件的指示;每個變頻器的電流值;質(zhì)量顯示值;該小循環(huán)吊具吊取的區(qū)域指示;局部設備界面實現(xiàn)圖形化動態(tài)實時展現(xiàn)制動器狀態(tài)指示等。
8)數(shù)據(jù)存儲
系統(tǒng)應在起重機運行過程中對運行數(shù)據(jù)依序存儲,存儲周期不應大于2 s,子系統(tǒng)可存儲不少于50 個工作循環(huán)的數(shù)據(jù),數(shù)據(jù)應能存儲歷史電動機電流,數(shù)據(jù)應能存儲歷史每次抓取質(zhì)量,數(shù)據(jù)應能存儲每個變頻器故障代碼,數(shù)據(jù)應能分別存儲提升卷筒、開閉卷筒承受的質(zhì)量。
9)歷史追溯
系統(tǒng)可在存儲容量達到上限前提示管理人員做好數(shù)據(jù)備份;在關閉電源或供電中斷時,自動保留已采集的所有信息;通過記錄的數(shù)據(jù)可追溯到起重機械的運行狀態(tài)和故障報警信息。
10)故障自診斷
系統(tǒng)通電后應具有運行自檢的程序,子系統(tǒng)可顯示自檢結果,發(fā)生故障而影響正常使用時能立即發(fā)出報警信號。
2.3 車載裝置
為滿足軋后庫鋼卷吊運工作的需要,無人化橋式起重機需要有足夠的精度實現(xiàn)無人化自動作業(yè),對車載系統(tǒng)的掃描周期、大車、小車、起升機構定位有精確的定位要求;為保障平穩(wěn)吊運重物系統(tǒng)還需要加裝防搖擺控制系統(tǒng)。為此,應對車載系統(tǒng)設置如下檢驗要求:
1)通用要求車載裝置的防護級別應滿足起重機械的實際使用環(huán)境條件要求。車載裝置的掃描周期應不大于100 ms。
2)大車機構
大車定位精度應不大于±30 mm ,大車定位故障時起重機械自動停機。大車行程限位需滿足如下要求:
①利用格雷母線位置設置程序限位,兩端設置禁行區(qū)域,進入禁行區(qū)域后,只能向相反方向運行。
②根據(jù)實際工況設置紅外防撞系統(tǒng)防撞距離,起重機在達到設計減速距離時開始減速;起重機在達到設計極限位置時,自動切斷前進方向的動力源,只可向反方向運行。
③設置極限限位,達到設計極限位置時,自動切斷前進方向的動力源,需人工確認后,起重機可向反方向運行。
3)小車機構
小車定位精度應不大于±30 mm,小車定位故障時起重機械自動停機。小車行程限位需滿足如下要求:
①利用格雷母線位置設置程序限位,兩端設置禁行區(qū)域,進入禁行區(qū)域后,只能向相反方向運行。
②設置極限限位,起重機達到設計極限位置時,自動切斷前進方向的動力源,需人工確認后方可向反方向運行。
4)起升機構
起升高度定位精度應不大于±20 mm ,起升高度測量須用變頻器后增量編碼器,起升高度測量應實時接入高度運行控制系統(tǒng),并形成閉環(huán)控制;排除編碼器損壞或受干擾丟失脈沖導致的反饋值的失真,保證安全。起升機構高度限位需滿足如下要求:
①起升機構應設置程序高度限位,起升機構在達到設計減速距離時開始減速;起升機構在達到設計起升高度極限位置時,自動切斷起重機上升方向的動力源,只可向下運行。
②起升機構應設置雙重限位,當起升機構第2 重限位動作時,起重機械自動切斷起重機械起升機構的動力電源,需人工確認復位后起升機構方可運行。
5)門聯(lián)鎖保護
在自動運行狀態(tài)下,起重機的門聯(lián)鎖保護動作時,起重機動力電源應無法接通;如處于運行狀態(tài),當門聯(lián)鎖保護動作時,所有機構應停止運行。
6)變頻器
系統(tǒng)配置的變頻器應具備:變頻器配置電能回饋單元或電阻,再生制動能量必須回送電網(wǎng)或迅速釋放,保護電器元件;變頻柜具有降溫設計。
7)電動機
系統(tǒng)配置的主鉤電動機應為變頻電動機,需增加編碼器的電動機,由電動機廠家配置安裝軸,保證同心度。電動機單獨配置冷卻風扇、抱閘及控制回路。
8)防搖功能
起重機械在行駛過程中吊物存在搖擺,直接關系到無人化橋式起重機的運行效率和安全性,電子防搖技術是無人化橋式起重機控制系統(tǒng)的關鍵要求。自動系統(tǒng)應具備防搖功能,在平移運動過程中發(fā)送停止命令,吊物在一個擺動周期內(nèi)停止晃動,重物搖擺角度小于±1°。
9)電纜
系統(tǒng)配置的控制電纜均含屏蔽層,且一端接地。
10)視頻系統(tǒng)
車載視頻系統(tǒng)應在工作過程中能監(jiān)視到吊點、大車行走區(qū)域范圍;視頻存儲時間不少于72 h。
2.4 網(wǎng)絡通訊子系統(tǒng)
整個庫區(qū)無人化橋式起重機的改造涉及多項獨立子系統(tǒng)的數(shù)據(jù)交互和通訊,起重機械在快速行駛中必須保證數(shù)據(jù)通訊的穩(wěn)定性和連續(xù)性。在項目建設過程中,對庫區(qū)新增工業(yè)級無線AP,以確保無線數(shù)據(jù)傳輸系統(tǒng)對庫區(qū)現(xiàn)場提供無線信號的全覆蓋,覆蓋空中起重機械運行范圍,在任何一個基站出現(xiàn)故障時,通訊終端會自動切換到相鄰的信號最好的基站,切換時間小于100 ms,不影響整個庫位系統(tǒng)的正常運行。為了保證網(wǎng)絡通訊子系統(tǒng)的通用性、穩(wěn)定性和連續(xù)性,在網(wǎng)絡通訊子系統(tǒng)檢驗方案制定中確定了如下檢驗要求。
1)通訊協(xié)議
系統(tǒng)采用的無線通訊協(xié)議應符合IEEE 802.11a/b/g/n標準 ,基于MAC/IP/ 協(xié)議/ 端口過濾的防火墻技術 。起重機至服務器通訊、手持機至服務器通訊、遠程控制、視頻監(jiān)控、遠程服務器與現(xiàn)場設備通訊等應采用第5 代移動通信技術(5G 通信)。
2)通訊內(nèi)容
起重機械運行狀態(tài)參數(shù)(如起重機械位置、電動機電流頻率、變頻器狀態(tài)、載荷質(zhì)量等)實時傳輸至地面子系統(tǒng),地面子系統(tǒng)實時發(fā)送命令至起重機械(啟動停止、上電下電)。
3)使用環(huán)境
網(wǎng)絡通訊子系統(tǒng)元器件應滿足起重機械的實際使用環(huán)境條件要求。
4)通訊故障保護
系統(tǒng)應具備通訊信號故障保護功能,當通訊信號中斷時系統(tǒng)應能發(fā)出警報,并平穩(wěn)停止起重機運行;通訊信號故障排除后經(jīng)手動復位后才能重新運行。
2.5 機械要求
無人化起重機應滿足的要求有:大小車軌道要求平整,無明顯彎曲;起升機構鋼絲繩長度不能過長,起升機構上升限位動作時卷筒上空余3 個繩槽以上;機械防撞止擋牢固結實;機械機構性能符合國家相關強制標準要求。
2.6 運行試驗
無人化起重機系統(tǒng)可按照預設程序完成各機構規(guī)定的動作和功能,無異常震動、沖擊、噪聲等,各類安全保護裝置動作可靠、準確。
3 應用實例
國內(nèi)某研究機構自2019 年開始開展探索無人化起重機檢驗項目,目前已完成約20 臺無人化起重機項目的檢驗工作。在項目的檢驗工作中,與起重機械無人化控制系統(tǒng)的供應商進行了充分的技術及現(xiàn)場檢驗工作交流,積累了豐富的無人化起重機檢驗經(jīng)驗,并形成了經(jīng)省院備案的《無人化起重機檢驗方案》。此次結合《智能制造 鋼鐵行業(yè) 無人化起重機通用技術要求》編制起草的過程,又對該檢驗方案進行了完善。目前,已按新修訂的檢驗方案完成該項目的8 臺無人化橋式起重機檢驗工作。經(jīng)確認該無人化橋式起重機的控制系統(tǒng)符合特種設備相關規(guī)范及現(xiàn)場使用工況的要求,可以實現(xiàn)起重機械無人化運行,全方位提升了智能工廠的生產(chǎn)效率。無人化橋式起重機控制系統(tǒng)總覽界面如圖5 所示。
4 結論
無人化起重機的開發(fā)與應用是國家鼓勵發(fā)展的研究方向,但起重機械是國家要求進行強制監(jiān)管的特種設備,使起重機械無人化工作能夠合規(guī)、合法地開展是亟需解決的問題。當前,尚無相應的無人化起重機的檢驗要求或檢驗方案,本研究結合了國內(nèi)相關法律法規(guī)對無人化橋式起重機的檢驗方案進行了探索。本文所述研究雖對起重機械無人化的開展和使用提供了一定的保障,但尚有進一步完善的空間。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
