安全PLC 系統(tǒng)在物料搬運(yùn)行業(yè)的應(yīng)用
2024-03-13 12:22:46張一然郝鵬飛張柯林
起重運(yùn)輸機(jī)械 2024年3期
張一然 郝鵬飛 袁 楷 張柯林 王 毅
北京起重運(yùn)輸機(jī)械設(shè)計(jì)研究院有限公司 北京 100007
0 引言
近些年,由于工業(yè)事故致使人員傷亡、財(cái)產(chǎn)損失和環(huán)境污染的情況頻發(fā),使人們更深刻認(rèn)識(shí)到建立安全工業(yè)流程的必要性。隨著工業(yè)安全的普及,新的安全國(guó)際標(biāo)準(zhǔn)IEC 61508—2000《電氣/電子/可編程電子安全系統(tǒng)的功能安全》和國(guó)家標(biāo)準(zhǔn)GB/T 20438—2017《電氣/電子/可編程電子安全相關(guān)系統(tǒng)的功能安全》應(yīng)運(yùn)而生。國(guó)內(nèi)外各行各業(yè)對(duì)于控制系統(tǒng)中電氣控制功能的安全要求也日益提高,許多歐美國(guó)家已經(jīng)將此類要求作為項(xiàng)目投標(biāo)的必要條件。目前,我國(guó)在這方面尚還處于發(fā)展初期,大部分設(shè)備都具有潛在的危險(xiǎn)性且沒(méi)有完善的防護(hù)措施,這也是安全事故頻發(fā)的重要原因之一。
近些年,國(guó)家對(duì)這類問(wèn)題重視度日漸提高,設(shè)備的安全性和穩(wěn)定性已然成為大家重點(diǎn)關(guān)注的焦點(diǎn)。在不斷拓展海外市場(chǎng)的過(guò)程中,對(duì)設(shè)備的控制系統(tǒng)及安全性要求越來(lái)越高,必須要達(dá)到國(guó)際標(biāo)準(zhǔn)。因此,安全控制系統(tǒng)在起重運(yùn)輸設(shè)備中起到至關(guān)重要的作用,也是用戶判定供應(yīng)商提供的設(shè)備是否可靠的重要指標(biāo)之一。
1 電氣系統(tǒng)安全控制的方式及選型基本原則
電氣系統(tǒng)需要設(shè)計(jì)一種穩(wěn)定的安全保護(hù)機(jī)制,盡可能地消除機(jī)械設(shè)備的安全隱患,為設(shè)備安全和人身安全提供有力保障,杜絕重大安全事故發(fā)生,避免造成經(jīng)濟(jì)上的損失。安全系統(tǒng)在設(shè)備啟動(dòng)、停止、出現(xiàn)不穩(wěn)定狀態(tài)以及檢修模式工作期間都應(yīng)對(duì)設(shè)備起到保護(hù)作用。如設(shè)備現(xiàn)場(chǎng)發(fā)生危急情況,安全保護(hù)系統(tǒng)應(yīng)立即啟動(dòng)響應(yīng)機(jī)制并及時(shí)做出反饋,保障設(shè)備安全停機(jī)。
電氣系統(tǒng)安全控制的方式從安全等級(jí)由低到高大體上可以分為3 種:由安全繼電器搭建的回路、安全PLC和安全總線系統(tǒng)、可編程的模塊化安全控制系統(tǒng)。
由安全繼電器搭建的安全回路可用于控制單一或數(shù)量較少的安全功能,主要適用于單機(jī)或簡(jiǎn)單自動(dòng)化生產(chǎn)線等小型安全控制系統(tǒng);安全可編程邏輯控制器(F-PLC)和安全總線系統(tǒng)適用于大型、離散式的安全控制系統(tǒng)。20 世紀(jì)末,安全PLC 問(wèn)世,其可編程序性能強(qiáng)大,使用安全總線能實(shí)現(xiàn)較高要求的安全控制,但成本較高;可編程的模塊化安全控制系統(tǒng)是近年推出的安全控制模塊類產(chǎn)品,介于安全繼電器和安全PLC 之間,具有一定的可編程能力和擴(kuò)展性,價(jià)格相對(duì)不高。
根據(jù)EN954-1《機(jī)械安全-控制系統(tǒng)有關(guān)安全的部件》安全等級(jí)的基本要求,首先依據(jù)機(jī)器的工作模式、功能對(duì)機(jī)器工作可能存在的所有危險(xiǎn)進(jìn)行分析、評(píng)估,確定設(shè)備各個(gè)部分的危險(xiǎn)等級(jí),從而選擇相應(yīng)的安全等級(jí),一般選3 級(jí)即可滿足大多數(shù)的應(yīng)用。然后對(duì)所有需要安全保護(hù)的部分進(jìn)行統(tǒng)計(jì),包括輸入、輸出、保護(hù)的安全等級(jí),系統(tǒng)的工作模式,系統(tǒng)的復(fù)位方式等。最后設(shè)計(jì)、選擇合適的安全保護(hù)方式和產(chǎn)品。
2 設(shè)備系統(tǒng)結(jié)構(gòu)及安全PLC 應(yīng)用實(shí)例
物料搬運(yùn)設(shè)備的系統(tǒng)主要應(yīng)包括檢測(cè)元件、執(zhí)行機(jī)構(gòu)、控制系統(tǒng)3 部分。物料搬運(yùn)設(shè)備通常具有運(yùn)行空間較為開(kāi)闊、可能出現(xiàn)運(yùn)行人員和檢修人員的點(diǎn)位較多、設(shè)備與設(shè)備之間的交互控制較為復(fù)雜等特點(diǎn)。因此,物料搬運(yùn)設(shè)備系統(tǒng)應(yīng)由以下組件構(gòu)成:輸入設(shè)備(包括主令控制器、各種安全限制器、急停開(kāi)關(guān)等)、邏輯控制器(系統(tǒng)PLC 和安全PLC 等)、執(zhí)行機(jī)構(gòu)(運(yùn)行設(shè)備、夾具設(shè)備等)。
安全PLC 系統(tǒng)是一個(gè)具有特殊結(jié)構(gòu)形式和特殊處理方式的PLC 安全認(rèn)證系統(tǒng)。安全PLC 系統(tǒng)包括安全輸入設(shè)備(如急停控制按鈕、安全門限位開(kāi)關(guān)或連鎖開(kāi)關(guān)、安全光柵或光幕等),安全控制電氣元件(如安全繼電器、安全PLC 和安全總線等)以及安全輸出控制(如主回路中的接觸器、繼電器等)。
各廠家的產(chǎn)品不同,所采用的技術(shù)和措施也不盡相同,但安全PLC 都具有以下2 個(gè)共同特點(diǎn):一是利用冗余多樣性技術(shù),能專業(yè)應(yīng)對(duì)條件苛刻的任務(wù)或安全相關(guān)應(yīng)用。二是可在任何時(shí)間、每一步進(jìn)行診斷和檢測(cè)以保證無(wú)差錯(cuò)或顯著地減少錯(cuò)誤。因此,當(dāng)安全PLC 發(fā)生故障或者失效時(shí),不會(huì)對(duì)相關(guān)人員的安全或者過(guò)程的安全帶來(lái)危險(xiǎn)。除此之外,大部分安全PLC 還具有以下特點(diǎn):1)根據(jù)相應(yīng)安全標(biāo)準(zhǔn)研制開(kāi)發(fā)的用于安全防護(hù)系統(tǒng)控制設(shè)備的可編程電子系統(tǒng);2)均為模塊化結(jié)構(gòu),各類模塊都設(shè)計(jì)成故障-安全型;3)具有完善的測(cè)試手段或采取有效措施保證其安全性;4)當(dāng)檢測(cè)到系統(tǒng)故障尤其是危險(xiǎn)故障時(shí)能使系統(tǒng)回到安全狀態(tài);5)取得相應(yīng)等級(jí)的安全標(biāo)準(zhǔn)證書,系統(tǒng)軟件也達(dá)到相應(yīng)安全等級(jí);6)能進(jìn)行系統(tǒng)故障報(bào)警并指示故障原因和故障位置;7)能在線進(jìn)行系統(tǒng)維護(hù),冗余卡可在線更換并恢復(fù);8)有準(zhǔn)確無(wú)誤的順序事故記錄功能。
以某起重機(jī)項(xiàng)目為例,就硬件和軟件2 方面分別介紹安全PLC 在物料搬運(yùn)行業(yè)中的應(yīng)用。
2.1 硬件設(shè)計(jì)
該項(xiàng)目共有4 臺(tái)灰渣搬運(yùn)起重機(jī),每臺(tái)設(shè)備均有各自的控制系統(tǒng),另設(shè)有1 套上位控制系統(tǒng)。項(xiàng)目選用了某品牌的安全控制系列產(chǎn)品,包括可配置安全控制器PNOZ m B0、擴(kuò)展模塊PNOZ m EF 4DIDOR、安全急停按鈕PIT es Set1s-5c、強(qiáng)制導(dǎo)向繼電器SRD-SIM4 SIM312 及配套端子等。其中上位控制部分設(shè)有1 個(gè)可配置安全控制器(以下簡(jiǎn)稱主m B0)和1 個(gè)擴(kuò)展模塊,安裝在上位控制電控柜內(nèi);4 臺(tái)設(shè)備的控制部分各設(shè)1個(gè)可配置安全控制器(以下簡(jiǎn)稱設(shè)備m B0),安裝在各設(shè)備的配電保護(hù)柜內(nèi)。控制器PNOZ m B0 具有以下功能和特點(diǎn):1)4 個(gè)最高可達(dá)EN IEC 62061 的SIL 3級(jí)別的半導(dǎo)體安全輸出;2)12 個(gè)常規(guī)輸入,可連接如急停按鈕、安全門限位、啟動(dòng)按鈕、雙手控制按鈕、掃描儀、使能開(kāi)關(guān)、操作模式選擇開(kāi)關(guān)等輸入設(shè)備;3)8 個(gè)可配置輸入/輸出,可配置為上述常規(guī)輸入設(shè)備或輔助輸出;4)4 個(gè)可配置輸出,可配置為輔助輸出或測(cè)試脈沖輸出,測(cè)試脈沖輸出用于監(jiān)控輸入短路;5)1塊LED 顯示屏,可顯示如錯(cuò)誤消息、診斷、電源電壓、輸入輸出錯(cuò)誤等信息;6)1 塊背光顯示屏用于顯示錯(cuò)誤消息、電源電壓狀態(tài)、輸入輸出狀態(tài)、狀態(tài)信息和單元信息。
對(duì)于急停開(kāi)關(guān)的布置,針對(duì)每臺(tái)設(shè)備分別在設(shè)備操作椅、起重機(jī)主梁安全門各設(shè)有1 個(gè)急停開(kāi)關(guān),信號(hào)通過(guò)硬接線進(jìn)入各自設(shè)備m B0;針對(duì)上位控制系統(tǒng)分別在裝載區(qū)控制箱(6 個(gè))、中控室操作臺(tái)、外部控制室操作臺(tái)各設(shè)有1 個(gè)急停開(kāi)關(guān),信號(hào)通過(guò)硬接線進(jìn)入主m B0。主m B0 與4 臺(tái)設(shè)備m B0 之間通過(guò)硬接線進(jìn)行信號(hào)交互。圖1 為安全PLC 硬件配置示意圖。
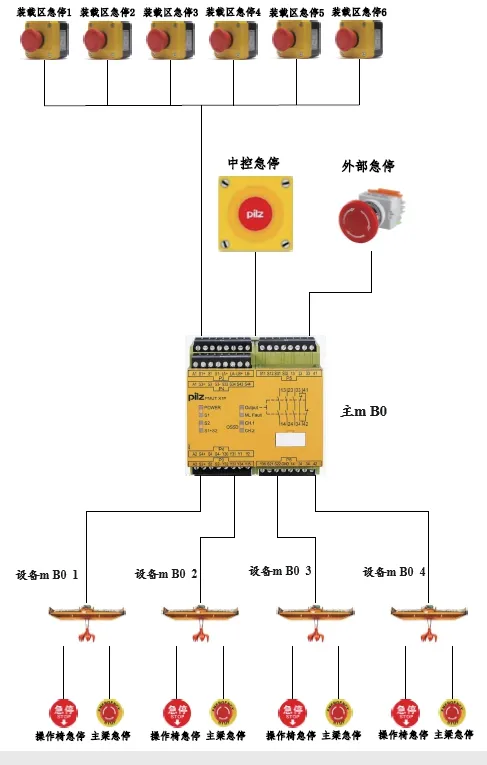
圖1 安全PLC 硬件配置示意圖
m B0 模塊需有2 組24 V DC 分別對(duì)控制系統(tǒng)的電源和半導(dǎo)體輸出分別進(jìn)行供電。其中半導(dǎo)體輸出的電源電壓必須始終存在,即使工程中沒(méi)有使用半導(dǎo)體輸出。需要注意的是,使用2 個(gè)電源分別饋送電壓時(shí),控制系統(tǒng)的電源電壓和半導(dǎo)體輸出的電源電壓要使用電位隔離。圖2 為m B0 模塊供電示意圖。
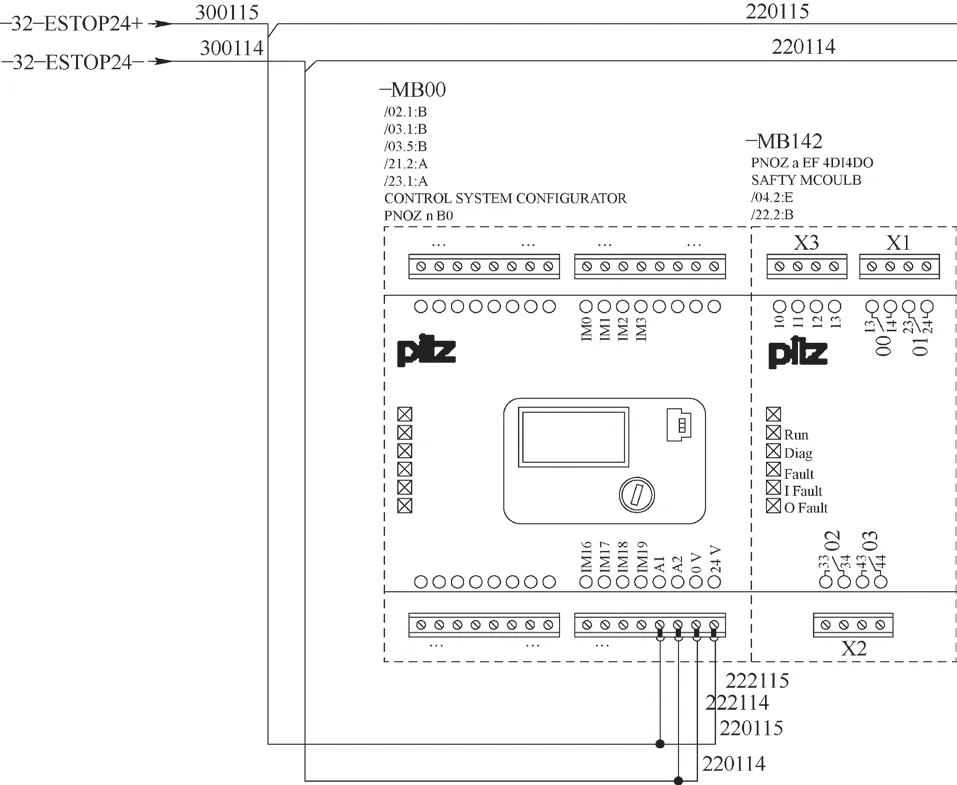
圖2 m B0 模塊供電示意圖
本項(xiàng)目中使用的急停開(kāi)關(guān)配有2 副觸點(diǎn),每個(gè)觸點(diǎn)進(jìn)入m B0 的1 個(gè)輸入通道。2 副觸點(diǎn)中的任意一副動(dòng)作,在控制器中都會(huì)被判斷為急停按鈕觸發(fā),該冗余設(shè)計(jì)保證了即使其中任意一個(gè)觸點(diǎn)出現(xiàn)卡阻或粘連等故障,也不會(huì)導(dǎo)致整個(gè)急停的失效。
2.2 邏輯及軟件介紹
2.2.1 主m B0 運(yùn)行邏輯
1)主m B0 接受與其直接關(guān)聯(lián)的各個(gè)急停開(kāi)關(guān)和每個(gè)設(shè)備m B0 的反饋信號(hào),當(dāng)有其中一個(gè)或一個(gè)以上的安全輸入斷開(kāi)時(shí),所有的安全輸出全部斷開(kāi)。
2)脈沖輸出供常規(guī)PLC(S7-1500)判斷具體哪路急停或安全條件不滿足。當(dāng)各急停拍下時(shí),安全控制器通過(guò)編程由可配置輸出端輸出不同赫茲數(shù)的脈沖至常規(guī)PLC,若2 個(gè)或2 個(gè)以上的急停同時(shí)拍下,常規(guī)PLC 通過(guò)脈沖數(shù)可判斷具體哪路急停或安全條件不滿足。
2.2.2 設(shè)備m B0 運(yùn)行邏輯
1)接受急停和m B0 急停反饋信號(hào),當(dāng)急停和安全輸入或主m B0 有斷開(kāi)時(shí),所有的安全輸出按照以下第2 條邏輯執(zhí)行。
2)斷開(kāi)邏輯 ①首先斷開(kāi)設(shè)備主接觸器回路,開(kāi)始監(jiān)測(cè)主接觸器狀態(tài)反饋的狀態(tài)。②當(dāng)主接觸器回路在30 ms 內(nèi)反饋斷開(kāi)則主斷路器回路無(wú)需斷開(kāi);當(dāng)主接觸器回路在30 ms 內(nèi)未斷開(kāi)則斷開(kāi)主斷路器回路,作為強(qiáng)制斷開(kāi)電源的輔助措施。③執(zhí)行邏輯①的同時(shí),發(fā)送斷開(kāi)指令給主m B0,以便通知主m B0 斷開(kāi)其他設(shè)備。④若主接觸器并非由m B0 發(fā)起的斷開(kāi)指令(設(shè)備的其他安全條件觸發(fā)),但仍監(jiān)控到主接觸器狀態(tài)反饋斷開(kāi),則不需要斷開(kāi)主斷路器。
3)通過(guò)脈沖輸出頻率情況供常規(guī)PLC 判斷哪一路或安全條件不滿足。
本項(xiàng)目由于使用的安全控制器需使用相應(yīng)的控制器編程軟件Multi Configurator。軟件需要授權(quán)才能上傳和下載程序,沒(méi)有授權(quán)的軟件只能做有限的編程功能。編程軟件界面主要包括硬件配置和用戶程序2 部分。
硬件配置時(shí)雙擊左邊模塊或者將其拖拽至右側(cè)硬件配置區(qū)域即可。將模塊拖拽至配置區(qū),完成后模塊下方會(huì)顯示已配置硬件的基本參數(shù),根據(jù)實(shí)物上的版本號(hào)選擇對(duì)應(yīng)的版本,設(shè)備標(biāo)識(shí)為自己定義的設(shè)備名稱;設(shè)備標(biāo)識(shí)和位置描述可根據(jù)實(shí)際需要選擇填寫,其余參數(shù)可不進(jìn)行編輯。本項(xiàng)目主m B0 硬件配置顯示如圖3 所示。

圖3 硬件配置圖
2.3 用戶程序界面
用戶程序界面分為程序管理區(qū)、輸入點(diǎn)配置區(qū)、功能塊配置區(qū)、邏輯塊配置區(qū)、輸出快配置區(qū)、輸出點(diǎn)配置區(qū)、功能塊選擇區(qū)7 部分(見(jiàn)圖4)。
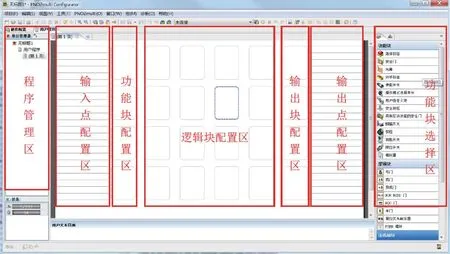
圖4 用戶程序界面
1)程序管理區(qū) 用于管理用戶程序,可添加/刪除或者重命名頁(yè)面。
2)輸入點(diǎn)配置區(qū) 雙擊激活輸入點(diǎn)配置框,配置輸入點(diǎn);設(shè)備ID 為硬件配置時(shí)用戶所配置的設(shè)備標(biāo)識(shí);輸入/輸出可下拉菜單選擇IO,RLO:0 為常閉點(diǎn),RLO:1 為常開(kāi)點(diǎn);監(jiān)測(cè)輸入回路觸點(diǎn)間的短路勾選后則需要配置測(cè)試脈沖,未配置則默認(rèn)識(shí)別24 V 為輸入電壓;否定勾選則表示將輸入信號(hào)取反,過(guò)濾時(shí)間指信號(hào)的安定時(shí)間,持續(xù)大于該時(shí)間信號(hào)則被認(rèn)為有效,避免干擾信號(hào)造成誤觸發(fā)。
3)功能塊配置區(qū) 可將右邊的功能例如急停功能塊等拖拽到此處進(jìn)行編輯,也可雙擊空白處激活選擇對(duì)話框所需功能塊;首先要將開(kāi)關(guān)類型選擇對(duì)應(yīng)的觸點(diǎn)類型,類型3-同步指的是2 個(gè)觸點(diǎn)的閉合與斷開(kāi)都有時(shí)間同步性的要求,不能大于3 s,否則會(huì)報(bào)錯(cuò);開(kāi)關(guān)類型選擇完成要根據(jù)實(shí)際接線配置IO,使用了測(cè)試脈沖則要勾選檢測(cè)輸入回路觸點(diǎn)間短路。
配置輸入后需要配置復(fù)位,復(fù)位有手動(dòng)復(fù)位、自動(dòng)復(fù)位、可監(jiān)控手動(dòng)復(fù)位3 種類型。①自動(dòng)復(fù)位 被觸發(fā)后只要輸入信號(hào)恢復(fù)正常后輸出立即恢復(fù);②手動(dòng)復(fù)位輸入信號(hào)恢復(fù)正常后需要1 個(gè)上升沿的復(fù)位信號(hào)輸出才能恢復(fù);③可監(jiān)控后動(dòng)復(fù)位 輸入信號(hào)恢復(fù)正常后需要一個(gè)下降沿的復(fù)位信號(hào)輸出才能恢復(fù)。
4)邏輯塊配置區(qū) 可將右側(cè)的邏輯塊拖拽到此處進(jìn)行編輯,也可雙擊空白處激活選擇對(duì)話框選擇所需功能塊;功能塊之間的連線可直接用鼠標(biāo)點(diǎn)擊拖拽連接。
5)輸出塊配置區(qū) 可在右側(cè)輸出部分選擇輸出塊,也可雙擊空白處激活選擇對(duì)話框選擇所需輸出塊,輸出塊有繼電器型、半導(dǎo)體型、安全閥型等,本項(xiàng)目使用了m B0 本體上的4 個(gè)半導(dǎo)體輸出和4 個(gè)可配置脈沖測(cè)試輸出,同時(shí)使用了擴(kuò)展模塊4DIDOR 的2 個(gè)繼電器輸出。半導(dǎo)體輸出可以選擇安全輸出和標(biāo)準(zhǔn)輸出,安全輸出是O0-O3,標(biāo)準(zhǔn)輸出是IM0-IM3、IM16-IM19 這幾個(gè)可配置為標(biāo)準(zhǔn)輸出用,另外測(cè)試脈沖也可配置為標(biāo)準(zhǔn)輸出使用。輸出類型默認(rèn)為單極輸出,也可根據(jù)需要配置輸出數(shù)量為單極輸出還是雙輸出。
反饋回路的作用是用來(lái)監(jiān)控輸出所驅(qū)動(dòng)的元件是否正常動(dòng)作,如圖5 所示,將接觸器的常閉觸點(diǎn)接入I7,當(dāng)輸出O0 正常輸出驅(qū)動(dòng)接觸器,接觸器正常動(dòng)作則反饋信號(hào)會(huì)有一個(gè)由ON 到OFF 的變化,如果在O0 輸出前該反饋信號(hào)不正常(如OFF)或動(dòng)作后反饋信號(hào)沒(méi)有在監(jiān)控時(shí)間內(nèi)斷開(kāi)(本項(xiàng)目設(shè)為3 s)則控制器認(rèn)為接觸器出現(xiàn)異常,則中斷輸出并報(bào)故障,從而達(dá)到監(jiān)控輸出驅(qū)動(dòng)單元的功能。在配置輸出模塊時(shí)要選擇使用反饋回路,然后在回路中把反饋信號(hào)連接到輸出模塊的反饋信號(hào)連接處。
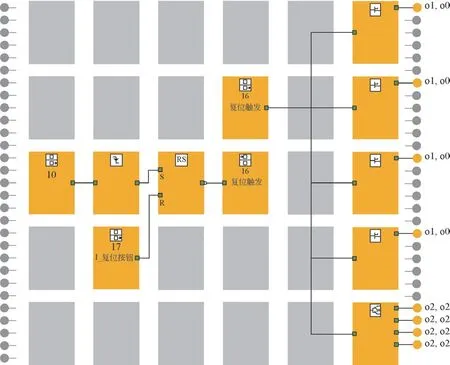
圖5 急停程序設(shè)計(jì)
具體程序如圖5 所示。這段程序中,節(jié)點(diǎn)16 為所有急停信號(hào)的并聯(lián)輸入點(diǎn),即整個(gè)系統(tǒng)中任何一個(gè)急停開(kāi)關(guān)被觸發(fā)都會(huì)使程序中節(jié)點(diǎn)16 動(dòng)作。節(jié)點(diǎn)16 后接一個(gè)下降沿和一個(gè)RS 觸發(fā)器,一旦檢測(cè)到節(jié)點(diǎn)16 的信號(hào)從1 變?yōu)? 時(shí),RS 觸發(fā)器被觸發(fā),節(jié)點(diǎn)18 動(dòng)作。節(jié)點(diǎn)18 使a1-o0、a1-o1、a1-o2、a1-o3 這4 個(gè)輸出點(diǎn)動(dòng)作,進(jìn)而將緊急停止信號(hào)傳輸?shù)? 臺(tái)設(shè)備的分m B0 上,由分m B0 使各設(shè)備停止運(yùn)行;同時(shí)觸發(fā)a2-o2、a2-o3 這2 個(gè)外部繼電器,繼電器信號(hào)輸出到主PLC,由主PLC進(jìn)行邏輯分析和判斷。由于2 個(gè)繼電器輸出信號(hào)的排列組合可以形成4 種狀態(tài),進(jìn)而通過(guò)這4 種狀態(tài)分別代表4 臺(tái)設(shè)備中的某一臺(tái)觸發(fā)了急停信號(hào)。
3 結(jié)語(yǔ)
本文介紹的安全PLC 系統(tǒng)目前尚屬并未廣泛應(yīng)用的控制系統(tǒng),隨著以人為本理念的深入貫徹,未來(lái)將具有長(zhǎng)遠(yuǎn)和持續(xù)性的發(fā)展,在工業(yè)生產(chǎn)中得到更加廣泛的應(yīng)用。根據(jù)不同項(xiàng)目控制系統(tǒng)的要求,統(tǒng)籌考慮冗余程度、故障原因、響應(yīng)速度、復(fù)位方式、性價(jià)比等因素,選擇適用的硬件和合理的配置,結(jié)合工藝設(shè)計(jì)和邏輯編程,組建一套完善的安全系統(tǒng),提升系統(tǒng)運(yùn)行的穩(wěn)定性,尤其是應(yīng)用于物料搬運(yùn)起重設(shè)備能大幅提升系統(tǒng)運(yùn)行的安全性和可靠性,減少甚至避免由于系統(tǒng)故障導(dǎo)致的人員傷亡和財(cái)產(chǎn)損失。
猜你喜歡
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
