不完全信息Epsilon納什均衡的航天器末端追逃博弈策略
2024-03-17 04:28:48孫兆偉
宇航學(xué)報(bào) 2024年1期
湯 旭,葉 東,肖 巖,孫兆偉
(哈爾濱工業(yè)大學(xué)衛(wèi)星技術(shù)研究所,哈爾濱 150001)
0 引言
隨著太空技術(shù)的不斷升級(jí),空間航天器的功能日趨完備,越來(lái)越多的航天器具備了空間態(tài)勢(shì)感知的能力[1-2]。當(dāng)攔截航天器接近目標(biāo)航天器時(shí),目標(biāo)方將采取機(jī)動(dòng)策略加以躲避,這使得攔截航天器控制系統(tǒng)在應(yīng)對(duì)新體系下迅速發(fā)展的空間攻防任務(wù)時(shí)面臨著困境[3]。因此,在爭(zhēng)奪戰(zhàn)時(shí)空間信息優(yōu)勢(shì)的過(guò)程中,亟待發(fā)展新的軌道控制策略。
針對(duì)此類具有自主機(jī)動(dòng)、自主決策能力的航天器攔截問(wèn)題,需要對(duì)連續(xù)動(dòng)態(tài)對(duì)抗的雙邊復(fù)雜態(tài)勢(shì)進(jìn)行研究,傳統(tǒng)的單邊優(yōu)化攔截控制方法將不再適用[4]。此時(shí),攔截器與目標(biāo)存在利益沖突,構(gòu)成博弈關(guān)系,空間攔截、交會(huì)對(duì)接問(wèn)題也將發(fā)展成雙方航天器間的追逃博弈問(wèn)題[5]。此外,由于空間戰(zhàn)場(chǎng)環(huán)境的限制、航天器固定指向以及傳感器的約束,攔截器將不能完全獲悉目標(biāo)信息,導(dǎo)致攔截呈現(xiàn)不完全信息態(tài)勢(shì)。因此,研究不完全信息下的航天器軌道追逃問(wèn)題對(duì)于應(yīng)對(duì)未來(lái)空間領(lǐng)域的新形勢(shì)具有重要意義[6]。
針對(duì)目標(biāo)具有機(jī)動(dòng)能力的雙邊攔截博弈問(wèn)題,應(yīng)用最廣泛的研究方法是微分對(duì)策理論,該理論已成熟應(yīng)用于導(dǎo)彈攔截問(wèn)題中。文獻(xiàn)[7]基于簡(jiǎn)化的雙積分系統(tǒng)導(dǎo)彈攔截模型,設(shè)計(jì)了導(dǎo)彈攔截矢量制導(dǎo)率,并分別給出了制導(dǎo)率在極坐標(biāo)和球坐標(biāo)下的分量表示,以便在不同坐標(biāo)系下進(jìn)行描述。文獻(xiàn)[8]在攔截過(guò)程中考慮了存在角度測(cè)量有界噪聲的情況,通過(guò)設(shè)計(jì)狀態(tài)觀測(cè)器實(shí)現(xiàn)對(duì)角度的估計(jì)并分別給出了不同噪聲條件下脫靶量的估計(jì)值。文獻(xiàn)[9]針對(duì)制導(dǎo)率包含攔截剩余時(shí)間且該時(shí)間難以確定的問(wèn)題,建立了關(guān)于剩余時(shí)間的方程,并討論了該方程的分叉現(xiàn)象,以求解最短攔截時(shí)間,從而實(shí)現(xiàn)快速攔截。盡管微分對(duì)策理論在導(dǎo)彈領(lǐng)域得到了廣泛的應(yīng)用,但在太空領(lǐng)域中仍有較大的提升空間。
與傳統(tǒng)的空間交會(huì)攔截問(wèn)題相比,航天器追逃博弈策略需要考慮博弈雙方的控制策略。文獻(xiàn)[10]將非線性攔截逃逸相對(duì)動(dòng)力學(xué)簡(jiǎn)化為CW方程,根據(jù)攔截任務(wù)終止要求引入零控脫靶矢量將動(dòng)力學(xué)方程降階,采用攔截脫靶量和燃料消耗作為二次最優(yōu)目標(biāo)函數(shù),推導(dǎo)了衛(wèi)星軌道次優(yōu)控制策略。文獻(xiàn)[11]則以CW 方程為基礎(chǔ),推導(dǎo)了最優(yōu)推力角博弈策略,并采用粒子群優(yōu)化算法解決了協(xié)態(tài)變量初值難以確定的問(wèn)題,得到了開(kāi)環(huán)解。同時(shí),通過(guò)預(yù)先生成一系列最優(yōu)軌跡,并進(jìn)行插值和外推,得到反饋控制策略的閉環(huán)解。文獻(xiàn)[12]考慮了航天器追逃的雙邊博弈問(wèn)題,提出了混合控制策略,以適配多任務(wù)的需求。通過(guò)博弈值函數(shù)與軌跡界柵判斷是否需要執(zhí)行策略切換,以實(shí)現(xiàn)追逃任務(wù)與自身任務(wù)的平衡。文獻(xiàn)[13-14]對(duì)航天器遠(yuǎn)程攔截博弈問(wèn)題進(jìn)行了研究,針對(duì)協(xié)態(tài)變量初值難以確定的問(wèn)題,通過(guò)遺傳算法優(yōu)化求解近似初值,然后將運(yùn)動(dòng)軌跡離散化,為各離散點(diǎn)配置狀態(tài),并使用非線性規(guī)劃優(yōu)化求解協(xié)態(tài)變量初值的精確值。文獻(xiàn)[15]研究了航天器多段博弈攔截問(wèn)題:在遠(yuǎn)程攔截段,基于微分對(duì)策理論分別給出了閉環(huán)鞍點(diǎn)解和開(kāi)環(huán)鞍點(diǎn)解,兩組解在形式上相同;在近程攔截段,考慮不同的指標(biāo)函數(shù),分別建立了不同的博弈策略。通過(guò)分析得出,實(shí)現(xiàn)攔截的充要條件是攔截器的推力幅值大于目標(biāo)的推力幅值。文獻(xiàn)[16]針對(duì)多航天器的末端攔截博弈問(wèn)題,根據(jù)攔截空間是否具有防御器將博弈態(tài)勢(shì)分為雙星博弈和三星博弈,并提出了一種博弈切換策略,將三星博弈轉(zhuǎn)化為分段的雙星博弈,并將雙邊時(shí)間方程擴(kuò)展到三星博弈中,使得攔截器能夠在不被防御器反攔截的情況下快速攔截目標(biāo)。
由于空間攻防時(shí)戰(zhàn)場(chǎng)的不確定性、信息不對(duì)稱等因素,航天器追逃任務(wù)中往往存在信息不完全的情況。因此,攔截航天器需要在有限時(shí)間內(nèi)對(duì)目標(biāo)航天器的不完全信息進(jìn)行估計(jì),以便實(shí)施有效的機(jī)動(dòng)策略。在這種情況下,航天器追逃博弈理論可以為攔截任務(wù)提供有效的決策支持。針對(duì)不完全信息下的攔截問(wèn)題,文獻(xiàn)[17]研究了目標(biāo)的逃逸防御問(wèn)題,通過(guò)給定攔截器策略,考慮目標(biāo)與防御器之間存在單向通訊或雙向通訊的不同情況,建立了目標(biāo)與防御器間的最優(yōu)博弈策略。文獻(xiàn)[18-19]中使用雙積分系統(tǒng)作為動(dòng)力學(xué)模型來(lái)探究目標(biāo)信息不完全和動(dòng)力學(xué)信息不完美的情況,將不完全信息和不完美信息視為擴(kuò)展的狀態(tài)變量,采用了增廣原動(dòng)力學(xué)的方法處理信息缺失問(wèn)題。同時(shí),設(shè)計(jì)了觀測(cè)器對(duì)擴(kuò)展?fàn)顟B(tài)進(jìn)行有效估計(jì)。文獻(xiàn)[20-21]中提出了一種基于狀態(tài)觀測(cè)的博弈值函數(shù)近似方法。該方法利用級(jí)數(shù)展開(kāi)對(duì)博弈值函數(shù)進(jìn)行近似,然后通過(guò)觀測(cè)目標(biāo)的狀態(tài)信息對(duì)級(jí)數(shù)的各系數(shù)進(jìn)行更新。該方法具有較高的計(jì)算效率和精度,已經(jīng)在空間攻防任務(wù)中得到了廣泛應(yīng)用。文獻(xiàn)[22-23]中考慮了模型不確定問(wèn)題,首先預(yù)設(shè)了多種攔截彈可能采取的制導(dǎo)率,并設(shè)計(jì)了多個(gè)估計(jì)器并行計(jì)算不同情況下攔截彈的最優(yōu)狀態(tài)估計(jì),并給出相應(yīng)估計(jì)后驗(yàn)概率。然后,通過(guò)概率融合方法將不同估計(jì)器得到的最優(yōu)狀態(tài)估計(jì)和后驗(yàn)概率融合,得到更加準(zhǔn)確的攔截彈制導(dǎo)率。最后,通過(guò)設(shè)計(jì)目標(biāo)和防御器的協(xié)同制導(dǎo)率有效躲避了攔截。
雖然追逃博弈問(wèn)題已經(jīng)得到了廣泛研究,但大多數(shù)研究都是以攔截器可以完全獲得目標(biāo)信息的假設(shè)為基礎(chǔ)進(jìn)行的,或者是基于簡(jiǎn)化的動(dòng)力學(xué)模型研究不完全信息博弈,這與實(shí)際的航天器追逃博弈態(tài)勢(shì)存在較大差異。因此,本文針對(duì)不完全信息下的航天器追逃博弈問(wèn)題進(jìn)行了研究,實(shí)現(xiàn)了在不完全信息下對(duì)目標(biāo)的快速攔截。隨著低軌目標(biāo)攔截技術(shù)不斷發(fā)展,任務(wù)能夠快速準(zhǔn)確地獲得發(fā)射窗口[24],該方法也將成為未來(lái)處理一類具備智能體特性的失控航天器的機(jī)動(dòng)策略之一。通過(guò)快速接近不受地面指令控制的失控航天器,并將其引導(dǎo)到安全軌道,可以避免對(duì)其他航天器和空間設(shè)施造成威脅。
綜合前文所述,本文針對(duì)不完全信息下航天器末端追逃博弈問(wèn)題,首先建立了航天器末端攔截動(dòng)力學(xué)模型,并給出了完全信息下的納什均衡策略對(duì)。然后,考慮目標(biāo)控制矩陣信息不完全的情況,設(shè)計(jì)了基于廣義卡爾曼濾波的行為學(xué)習(xí)信息估計(jì)算法,并嚴(yán)格證明了所提出的不完全信息下微分博弈策略對(duì)滿足Epsilon 納什均衡。最后,通過(guò)仿真驗(yàn)證了算法的有效性和攔截的快速性。本策略不僅適用于航天器攔截任務(wù),還可以作為星群中具備智能體特性的失控航天器的處理方法,具有實(shí)際應(yīng)用價(jià)值。
1 航天器相對(duì)運(yùn)動(dòng)狀態(tài)方程
在航天器末端攔截段,攔截航天器與目標(biāo)航天器的相對(duì)距離遠(yuǎn)小于兩星質(zhì)心到地心的距離,因此在攔截衛(wèi)星附近設(shè)置參考衛(wèi)星O1,P為攔截航天器,如圖1 所示。假設(shè)參考衛(wèi)星運(yùn)行在圓軌道,以參考衛(wèi)星為原點(diǎn),x軸沿著參考衛(wèi)星地心矢徑方向,z軸沿著軌道角動(dòng)量方向,y軸滿足右手定則,定義虛擬衛(wèi)星軌道坐標(biāo)系O1xyz[25],在LVLH 坐標(biāo)系下攔截器相對(duì)參考衛(wèi)星的動(dòng)力學(xué)方程可以簡(jiǎn)化為CW方程:
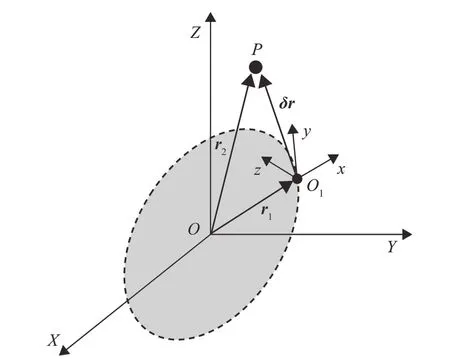
圖1 攔截器與參考衛(wèi)星Fig 1 Interceptor and reference satellite
式中:x,y,z為攔截器相對(duì)參考衛(wèi)星的位置;ω為參考衛(wèi)星的軌道角速度;ux,uy,uz分別為攔截器三軸方向上的控制輸入。
由線性系統(tǒng)理論可得狀態(tài)轉(zhuǎn)移矩陣為:
式中的子矩陣[26]分別為:
式中:τ=t-t0,且滿足(t,t0)=Φ(t,t0)A。
當(dāng)τ=tf-t時(shí),狀態(tài)轉(zhuǎn)移矩陣Φ滿足(tf,t)=-Φ(tf,t)A。在該虛擬衛(wèi)星軌道坐標(biāo)系下,攔截器與目標(biāo)動(dòng)力學(xué)均滿足CW方程,即:
式中:Ui(i=P,E)分別為攔截器P 以及目標(biāo)E 的推力,且均滿足幅值限制‖UP‖<ρP,‖UE‖<ρE。
定義攔截器與目標(biāo)的相對(duì)狀態(tài)為:
對(duì)其求導(dǎo)并將式(4)代入可得相對(duì)狀態(tài)方程:
式中:CE=BP。
2 有限時(shí)間追逃博弈策略對(duì)
在末端博弈過(guò)程中,雙方將圍繞攔截結(jié)束時(shí)的距離展開(kāi)爭(zhēng)奪。攔截器盡可能以最小代價(jià)實(shí)現(xiàn)對(duì)目標(biāo)的快速接近,而目標(biāo)則盡可能以最小代價(jià)增大與攔截器之間的距離。因此,本文定義以下指標(biāo)函數(shù):
式中:S>0為對(duì)稱正定矩陣;Q≥0為對(duì)稱半正定矩陣;RP>0與RE>0均為對(duì)稱正定矩陣,且滿足:
式中:I∈R3×3為單位陣。
定義如下哈密頓函數(shù):
式中:λ為協(xié)態(tài)變量。
設(shè)協(xié)態(tài)變量與狀態(tài)變量滿足如下關(guān)系:
式中:P為對(duì)稱正定陣,即P>0,PT=P。
對(duì)式(12)求導(dǎo),并將其與式(7)和式(11)代入式(13),可得黎卡提微分方程如式(14)所示。
因此,攔截器與目標(biāo)的鞍點(diǎn)策略對(duì)為:
式中:P滿足式(15),推力滿足幅值限制‖UP‖≤ρP,‖UE‖≤ρE。
3 不完全信息下博弈策略設(shè)計(jì)
本節(jié)考慮攔截航天器無(wú)法獲取目標(biāo)航天器控制矩陣的不完全信息情況。在這種情況下,追逃博弈不再滿足納什均衡,因此本文采用Epsilon 納什均衡(后文簡(jiǎn)寫(xiě)為ε-納什均衡)[27]對(duì)其進(jìn)行描述。此外,目標(biāo)航天器實(shí)際采取式(16)中的博弈策略,掌握著博弈進(jìn)程的完全信息,進(jìn)而獲得更好的逃逸性能。
假設(shè)1.在本節(jié)研究的情境下,攔截器在面對(duì)不完全信息時(shí)存在行為學(xué)習(xí)信息估計(jì)進(jìn)程,而目標(biāo)無(wú)法獲取攔截器的實(shí)際機(jī)動(dòng)策略。
注1.如果目標(biāo)能夠獲取攔截器的實(shí)際策略,那么它將采取誘導(dǎo)策略來(lái)迷惑攔截器,而攔截器則會(huì)采取相應(yīng)的對(duì)策來(lái)應(yīng)對(duì)誘導(dǎo)策略。這種無(wú)限變化的過(guò)程可以被看作是一個(gè)無(wú)限維博弈,因?yàn)殡p方都在不斷地改變自己的策略以適應(yīng)對(duì)方的變化。為了避免這種情況,本文假設(shè)1 指出只有攔截器存在信息估計(jì)的策略,而目標(biāo)不知道該過(guò)程和其實(shí)際機(jī)動(dòng)策略。
定義擴(kuò)展?fàn)顟B(tài)變量Y=[XPETrE]T,則擴(kuò)展?fàn)顟B(tài)方程與量測(cè)方程為:
由于擴(kuò)展?fàn)顟B(tài)方程的非線性,本文采用廣義卡爾曼濾波(類EKF)對(duì)RE進(jìn)行估計(jì)。定義標(biāo)稱狀態(tài)為Yn,Zn,則在標(biāo)稱狀態(tài)點(diǎn)對(duì)式(17)進(jìn)行一階泰勒展開(kāi)可得:
式中:ΔY=Y-Yn,ΔZ=Z-Zn為狀態(tài)偏差,F(xiàn)n為雅克比矩陣,Hn為量測(cè)矩陣,具體形式如下:
式中:Φ(k,k-1)為狀態(tài)轉(zhuǎn)移矩陣,且Φ(k,k-1) ≈I+FnT,Wk-1為過(guò)程噪聲,Vk為量測(cè)噪聲,T為采樣時(shí)間,且滿足如下條件:
式中:Ψk為系統(tǒng)噪聲序列的方差陣,為半正定陣;Rk為量測(cè)噪聲序列的方差陣,為正定陣;δkj為Kronecker符號(hào)。
圖2所示為不完全信息下的博弈控制策略流程,針對(duì)線性化的狀態(tài)方程(21),采用卡爾曼濾波進(jìn)行狀態(tài)估計(jì),此時(shí)的濾波方程為:
為了盡可能減小狀態(tài)偏差,本文希望狀態(tài)標(biāo)稱值盡可能接近于狀態(tài)最優(yōu)估計(jì)值。因此,可以將狀態(tài)標(biāo)稱值設(shè)置為狀態(tài)最優(yōu)估計(jì)值,以減少估計(jì)誤差。
式中:P*滿足如下黎卡提方程:
且P*仍滿足終端條件P*(tf)=S。
4 滿足ε-納什均衡的數(shù)學(xué)證明
在實(shí)際的空間攻防過(guò)程中,存在許多不確定性因素,例如戰(zhàn)爭(zhēng)迷霧、傳感器約束、目標(biāo)無(wú)規(guī)律機(jī)動(dòng)等。這些因素導(dǎo)致了目標(biāo)信息的不完全性,從而無(wú)法滿足完全信息下的納什均衡,因此完全信息策略不再適用。本節(jié)將嚴(yán)格證明所設(shè)計(jì)的微分博弈策略對(duì)滿足ε-納什均衡。這意味著,當(dāng)策略對(duì)滿足更加寬松的ε-納什均衡時(shí),可以確保攔截航天器處在不完全信息下的最劣情況時(shí)仍能獲得近似最優(yōu)解,并且目標(biāo)航天器的機(jī)動(dòng)策略不會(huì)對(duì)其收益帶來(lái)較大影響。
定理1.設(shè)攔截航天器與目標(biāo)航天器的動(dòng)力學(xué)方程為式(7),指標(biāo)函數(shù)采用式(8),攔截器實(shí)際采取的策略為式(25),記為,目標(biāo)實(shí)際采取的策略為式(16),記為。此時(shí)博弈策略對(duì)形成ε-納什均衡,即:
證.采取狀態(tài)估計(jì)策略下,相應(yīng)的航天器狀態(tài)分別記為,協(xié)態(tài)變量記為λ*,此時(shí)的博弈策略對(duì)改寫(xiě)為:
將式(29)代入相對(duì)狀態(tài)方程(7),并積分可得:
此時(shí)的指標(biāo)函數(shù)為:
注2.當(dāng)攔截器采取不同的機(jī)動(dòng)策略時(shí),會(huì)導(dǎo)致兩者相對(duì)狀態(tài)變量的不同,因此盡管目標(biāo)都采取了最優(yōu)策略,但是對(duì)應(yīng)的控制輸入?yún)s可能是不同的。綜上所述,本文將這種情況下的目標(biāo)策略記為。
此時(shí)的狀態(tài)變量為:
此時(shí)的指標(biāo)函數(shù)為:
同時(shí),對(duì)式(13)進(jìn)行積分,并結(jié)合橫截條件可得:
式中:i為任意策略。
定義狀態(tài)變量差為ΔX=X*-X+,協(xié)態(tài)變量差為Δλ=λ*-λ+,分別將式(30)、(33)和(35)代入得到:
對(duì)上式中的ΔXT(tf)SX+(tf)項(xiàng)進(jìn)行積分變換,則有:
令τ1-t0=τ-tf,則有:
式中:λmax(·)表示矩陣的最大特征值,由函數(shù)積分有界性定理可知:
因此,不完全信息下的追逃博弈策略設(shè)計(jì)滿足ε-納什均衡。
5 仿真校驗(yàn)
為了驗(yàn)證所提出的行為學(xué)習(xí)信息估計(jì)追逃博弈策略在不完全信息條件下的有效性,本節(jié)進(jìn)行了3 種不同情況的對(duì)比分析,包括完全信息、不完全信息和不完全信息條件下的信息估計(jì)博弈策略。
在完全信息條件下,假設(shè)雙方都可以獲取對(duì)方采取的納什均衡策略和當(dāng)前狀態(tài)信息。而在不完全信息條件下,假設(shè)攔截器只獲取到初始位置和對(duì)方可能采取的策略集合。在信息估計(jì)博弈條件下,本文考慮實(shí)際空間攻防中末端追逃場(chǎng)景,采用提出的不完全信息下ε-納什均衡博弈策略追擊目標(biāo)。通過(guò)對(duì)比分析3 種不同條件下的末端追逃結(jié)果,本節(jié)評(píng)估了所提出的不完全信息ε-納什均衡的航天器追逃博弈策略的有效性。
初始條件設(shè)定如下:假設(shè)攔截航天器與目標(biāo)均運(yùn)行在近地軌道附近,選取近地軌道上與其相近的衛(wèi)星作為參考衛(wèi)星,其軌道角速度ω=0.001 rad · s-1。攔截器與目標(biāo)的初始位置分別為[1.5 0.5 0]Tkm,[0 0 0]Tkm,初始速度分別為[0 0 0]Tkm · s-1,[ -0.05 0 0.05]Tkm · s-1。
假設(shè)攔截器與目標(biāo)的最大推力加速度均為10 m·s-2,廣義Kalman 濾波中過(guò)程噪聲方差陣為diag[10-610-610-60.25 × 10-60.25 × 10-60.25 × 10-61010],量測(cè)噪聲方差陣為diag[10-810-810-80.25 ×10-80.25 × 10-80.25 × 10-8]。
5.1 完全信息博弈
在這種情況下,攔截器可以精確獲取到目標(biāo)的控制矩陣RE。通過(guò)仿真,可以觀察到圖3和圖4中展示的航天器三維運(yùn)動(dòng)軌跡和相對(duì)距離變化,在488 s時(shí),攔截器成功地?cái)r截了目標(biāo)。此外,圖5展示了完全信息博弈進(jìn)程中攔截器的控制加速度變化情況。
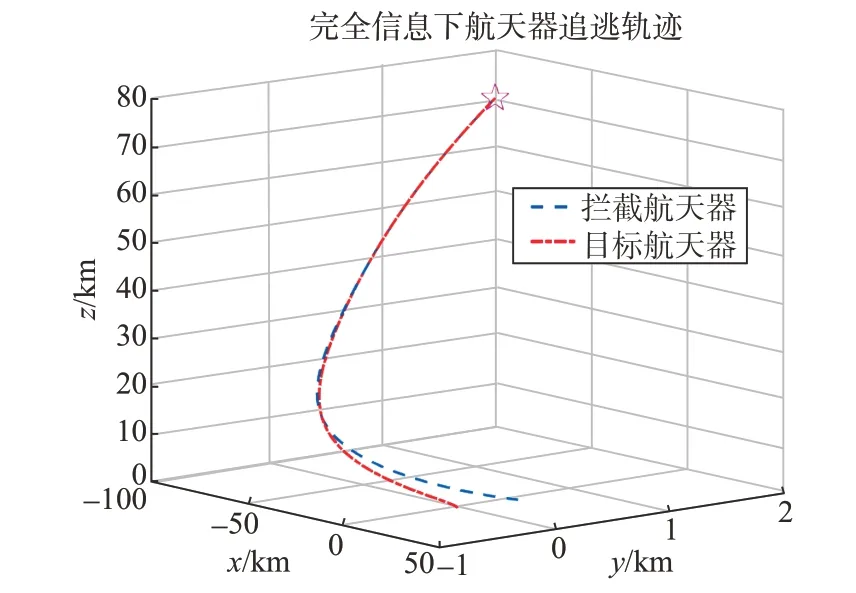
圖3 完全信息下航天器追逃軌跡Fig.3 Spacecraft pursuit-evasion trajectory under complete information
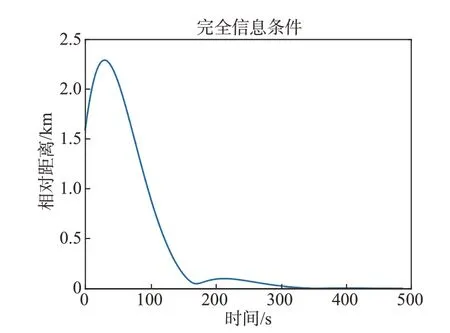
圖4 完全信息下航天器相對(duì)距離Fig.4 Relative distance of spacecraft under complete information
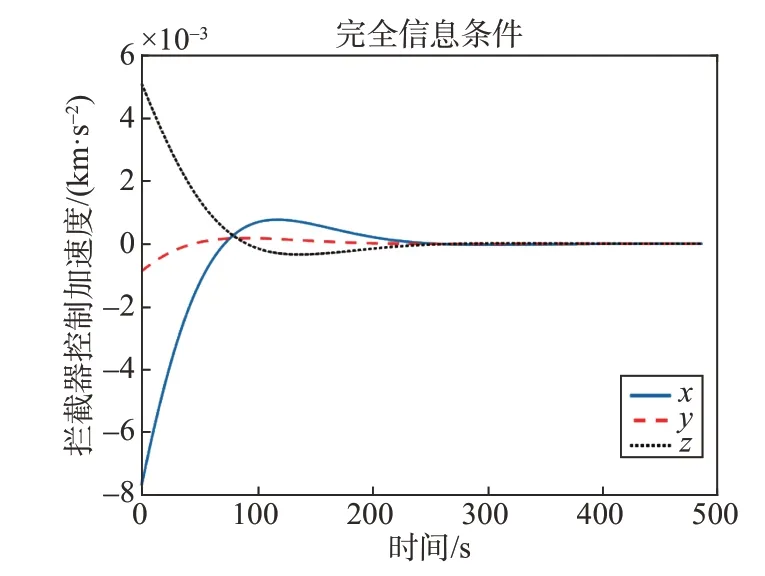
圖5 完全信息下攔截器控制加速度Fig.5 Control acceleration of the interceptor under complete information
5.2 不完全信息博弈
在這種情況下,攔截器無(wú)法準(zhǔn)確獲取到目標(biāo)的控制矩陣,只能通過(guò)猜測(cè)該矩陣來(lái)設(shè)計(jì)攔截器策略,假設(shè)攔截器猜測(cè)的目標(biāo)控制矩陣為=2 ×106I3。
通過(guò)仿真圖6 可以看出航天器間追逃軌跡,且攔截器在1 979 s 時(shí)成功攔截了目標(biāo)。然而,從圖7中可以看出,攔截器與目標(biāo)的相對(duì)距離變化很劇烈,經(jīng)過(guò)多次震蕩,攔截器才最終實(shí)現(xiàn)攔截。
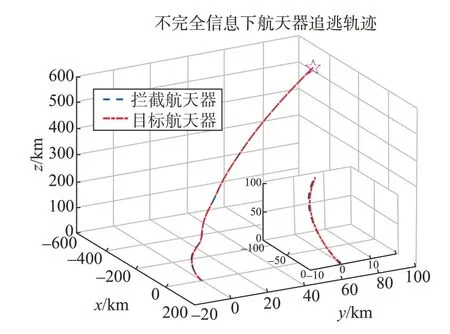
圖6 不完全信息下航天器追逃軌跡Fig.6 Spacecraft pursuit-evasion trajectory under incomplete information
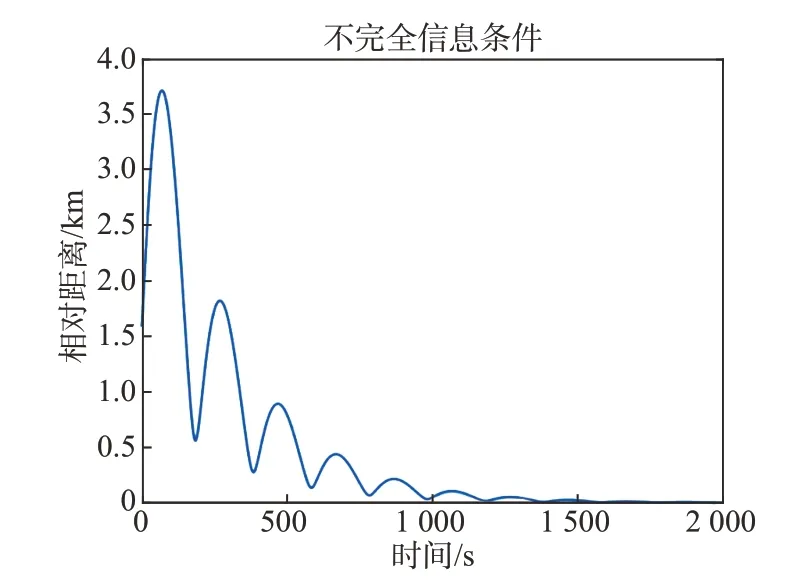
圖7 不完全信息下航天器相對(duì)距離Fig.7 Relative distance of spacecraft under incomplete information
通過(guò)比較圖5 和圖8 可以看出,由于攔截器是在猜測(cè)較大的值下決策的,該條件下的控制加速度表現(xiàn)出劇烈的振蕩,攔截過(guò)程的控制性能顯著下降。仿真結(jié)果表明,如果攔截器不能完全獲得目標(biāo)的信息,會(huì)導(dǎo)致攔截時(shí)間增加、攔截性能下降。因此,在航天器追逃控制中,對(duì)目標(biāo)的不完全信息進(jìn)行估計(jì)具有重要意義。
5.3 不完全信息下信息估計(jì)博弈策略
在這種情況下,攔截器采用信息估計(jì)的方法來(lái)適配目標(biāo)的控制矩陣,從而建立不完全信息下的博弈策略。假設(shè)攔截器對(duì)目標(biāo)控制矩陣的初始估計(jì)值為=2 × 106I3。
通過(guò)圖9和圖10可以觀察到航天器的三維追逃軌跡以及兩者間相對(duì)距離的變化情況,攔截器在經(jīng)過(guò)501 s 的追擊后成功地?cái)r截了目標(biāo)。從仿真圖11中可以看出,在估計(jì)目標(biāo)控制矩陣并采取相應(yīng)的行為學(xué)習(xí)方法后,攔截器的控制性能與完全信息條件下的情況相對(duì)接近,說(shuō)明在目標(biāo)信息不完全的情況下,通過(guò)信息估計(jì)來(lái)適配目標(biāo)的控制矩陣可以有效提高航天器的攔截性能。
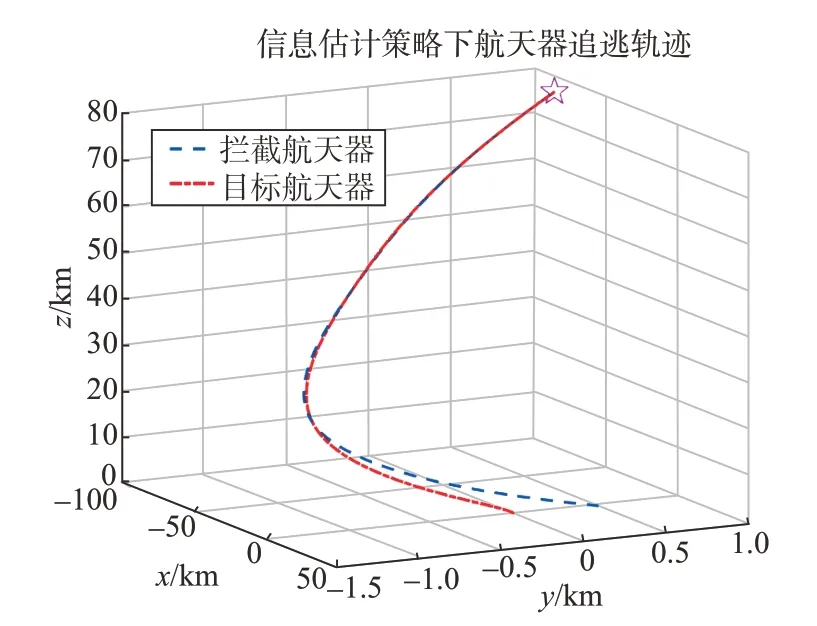
圖9 不完全信息估計(jì)策略下航天器追逃軌跡Fig.9 Spacecraft pursuit-evasion trajectory under estimation strategy
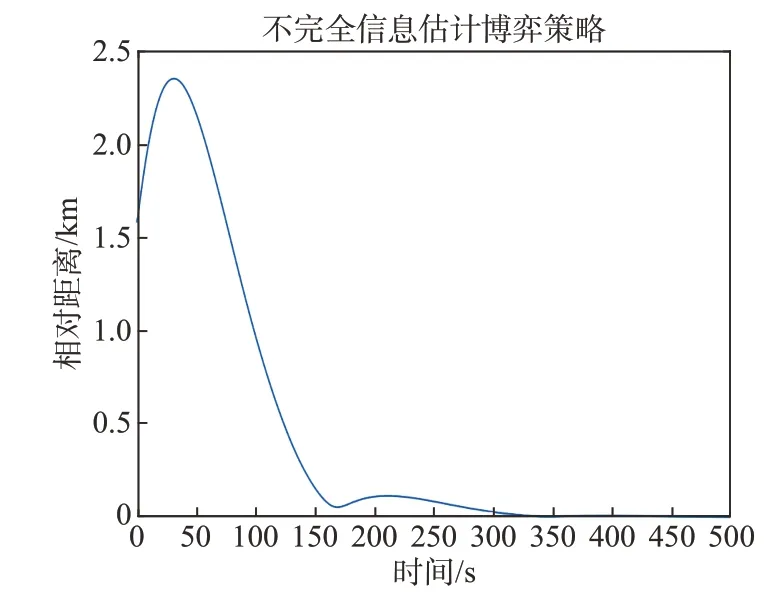
圖10 不完全信息估計(jì)策略下航天器相對(duì)距離Fig.10 Relative distance of spacecraft under estimation strategy
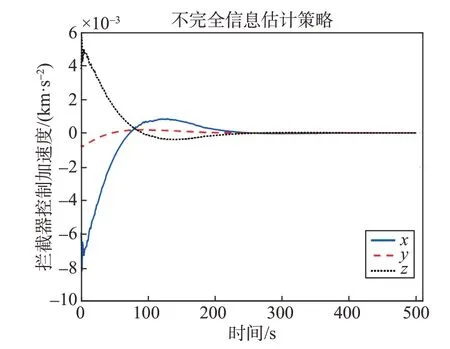
圖11 不完全信息估計(jì)策略下攔截器控制加速度Fig.11 Control acceleration of the interceptor under estimation strategy
圖12 顯示了攔截器對(duì)目標(biāo)控制矩陣信息的估計(jì)誤差,通過(guò)廣義Kalman 濾波算法,可以有效地對(duì)目標(biāo)信息進(jìn)行估計(jì),估計(jì)誤差快速收斂。
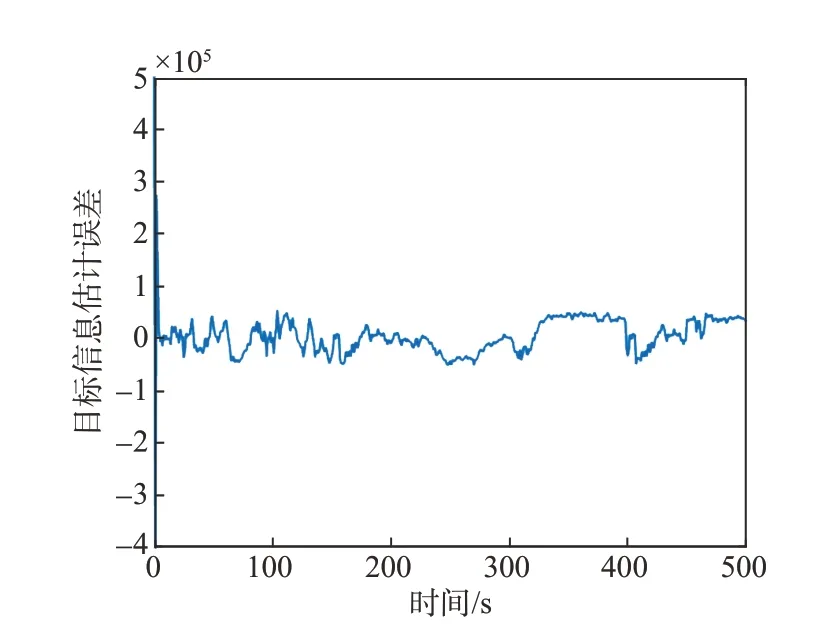
圖12 目標(biāo)信息估計(jì)誤差Fig.12 Estimation error of the target information
在追逃博弈中,代價(jià)函數(shù)值是衡量策略優(yōu)劣的標(biāo)準(zhǔn)。圖13 給出了3 種博弈場(chǎng)景的代價(jià)函數(shù)指標(biāo)。結(jié)果表明,當(dāng)攔截器采用信息估計(jì)策略時(shí),相應(yīng)的指標(biāo)明顯優(yōu)于不完全信息方案,攔截時(shí)間短、成本低,并且接近完全信息方案的指標(biāo),這驗(yàn)證了不完全信息估計(jì)博弈策略的有效性。
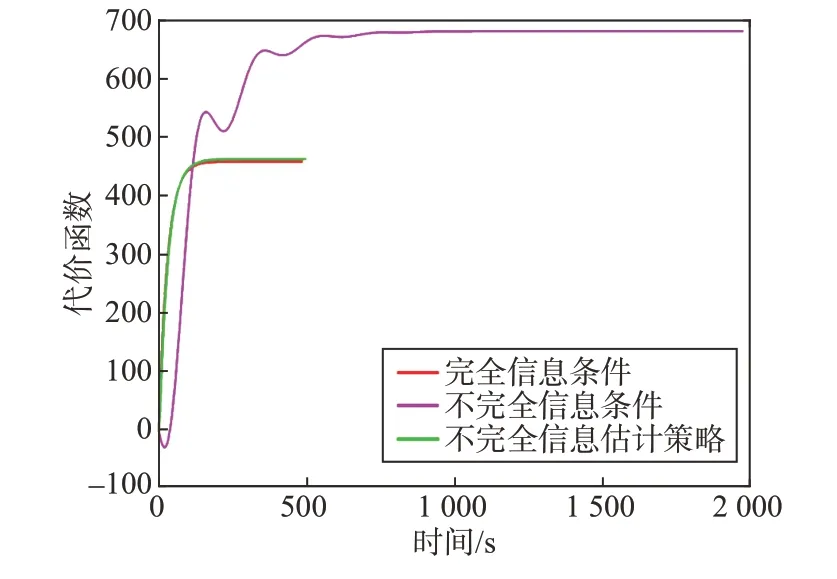
圖13 三種博弈場(chǎng)景的代價(jià)函數(shù)指標(biāo)值Fig.13 The cost function values of the three game scenarios
6 結(jié)論
本文探討了在不完全信息的情況下,如何設(shè)計(jì)一種快速、有效的航天器末端追逃博弈策略。首先,本文基于微分對(duì)策理論推導(dǎo)出完全信息下的納什均衡策略對(duì)。為了對(duì)未知的目標(biāo)信息進(jìn)行估計(jì),進(jìn)一步提出了基于廣義Kalman 濾波的估計(jì)算法。在此基礎(chǔ)上,設(shè)計(jì)了不完全信息下的航天器追逃博弈策略,并嚴(yán)格證明了該策略滿足ε-納什均衡條件。最后,通過(guò)仿真分析驗(yàn)證了該策略的有效性,結(jié)果表明采用本文提出的末端追逃博弈策略可以有效地估計(jì)目標(biāo)信息并實(shí)現(xiàn)快速攔截。
綜上所述,博弈論與空間飛行器導(dǎo)航、制導(dǎo)與控制相結(jié)合具有廣闊的應(yīng)用前景,能夠?yàn)槲磥?lái)具有自主避障能力的航天器攔截領(lǐng)域研究提供新的思路和方法,有望成為未來(lái)空間攻防任務(wù)的重要突破點(diǎn)。
猜你喜歡
教學(xué)考試(高考化學(xué))(2021年2期)2021-05-30 06:15:52
中學(xué)生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學(xué)生作文(低年級(jí)適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
時(shí)代英語(yǔ)·高三(2014年5期)2014-08-26 02:49:51
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32