基于巡檢無人機增程裝置的設計和實現
2024-03-25 06:34:20黃呈帥王劍飛鬲新鵬羅志鵬孫秀卿
電子設計工程 2024年6期
黃呈帥,王劍飛,鬲新鵬,羅志鵬,孫秀卿
(1.陜西省天然氣股份有限公司,陜西西安 710016;2.西安愛生無人機技術有限公司,陜西西安 710129)
巡檢無人機是一種以無線電遙控或飛控計算機操縱的不載人飛機,能夠自主完成電力、燃氣、管線的巡檢[1]。測控系統是無人機系統中必不可少的一個重要組成部分[2],用于傳輸無人機的遙控指令、遙測指令、跟蹤定位和圖像信息。測控系統(俗稱數據鏈)考慮到設計操作的簡單化,多采用時分系統,即接收和發射在時隙上分開,機載和地面配備一套測控系統[3]。
無人機測控系統主要分為射頻和基帶,兩者集成在電路板和金屬結構內。通常射頻的大功率器件會對基帶造成干擾[4],致使集成、設計、調試難度增大。
測控系統根據無人機的巡檢半徑進行選型,分為30、50、100、200 km 等。控制距離越遠,射頻功率芯片輸出功率越大,對基帶造成干擾越大,設計難度也越大。對測控系統來說,控制距離的改變,其基帶、射頻、堆疊、結構均需重新設計,成本也隨著控制距離直線上升。對于長距離的應用場景,短距離測控系統不能達標。對于短距離的應用場景,長距離測控系統成本昂貴,且重量、尺寸、功耗又較為冗余。因此將測控系統的射頻和基帶進行分模塊設計,基帶部分進行固定化設計,射頻部分根據巡檢距離進行適應性設計或選型,將大幅降低設計難度和成本。
1 系統總體設計架構
測控系統主要包括射頻和基帶兩部分。基帶部分用于實現數字功能,包括使用FPGA 和ARM實現通信算法,波形的解調和調制、編碼和解碼、數模轉換、模數轉換以及和用戶的接口交互。射頻部分則用于實現模擬射頻信號的放大和輸出,以及接收信號的放大和輸入。圖1 為測控終端的整體架構圖。
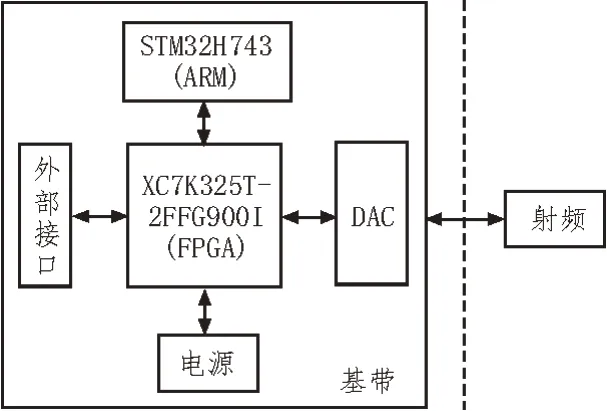
圖1 測控終端的整體設計架構
測控系統增程裝置主要涵蓋測控系統的射頻部分,其包含射頻接收電路、射頻發射電路、抗毀傷電路、控制電路四部分,增程模塊的主要設計架構如圖2 所示。增程裝置能夠根據基帶部分作適應性調整,具有自適應感知及自主收發切換功能,同時適應基帶頻段和控制距離的改變,最終實現巡檢無人機測控的經濟性和方便性。
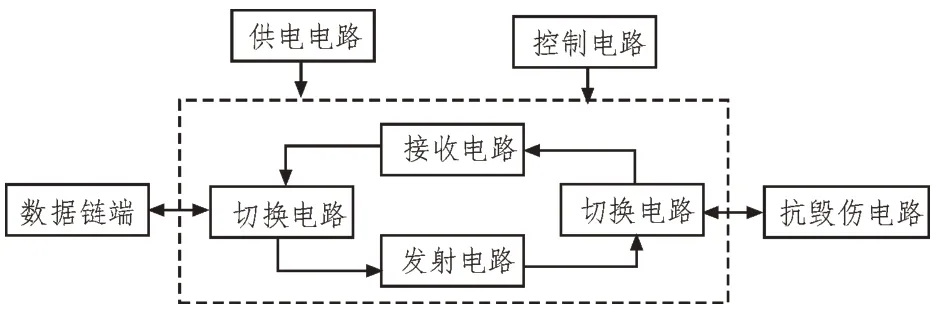
圖2 增程模塊的主要設計架構
2 主要模塊電路設計
2.1 射頻接收電路
接收電路用于對接收遠端傳輸進來的無線電小信號[5]進行放大和濾波。
當無人機在遠距離高空飛行時,測控系統發射的電磁波,會受到地形和環境的影響,產生損耗和多徑效應。
接收天線接收到的電磁信號通常經過空間傳播衰減很大,信號微弱并加載噪聲干擾,信噪比較低[6],因此接收機的接收靈敏度便成為重要的指標[7],其定義如式(1)所示:
式中,S0是接收靈敏度,BW 是信道帶寬,NF 是接收鏈路噪聲系數,是解調門限。由式(1)可知,帶寬、噪聲系數以及解調門限是影響接收靈敏度的關鍵參數[8]。
因此,接收電路設計的關鍵是盡可能地提高接收靈敏度[9]。通過對射頻前端低噪聲放大器的選型和濾波器的合理布局設計,降低整個鏈路的噪聲系數,提升接收靈敏度。
接收電路的低噪聲放大器選擇NXP 公司的集成芯片BGU8052,是一款低噪聲高線性度放大器,具有較好的輸入和輸出回波損耗,在L 波段具有超低的噪聲系數,滿足接收機的設計要求。接收電路設計如圖3 所示,濾波器可根據實際的需求進行選型,推薦選用聲表濾波器。
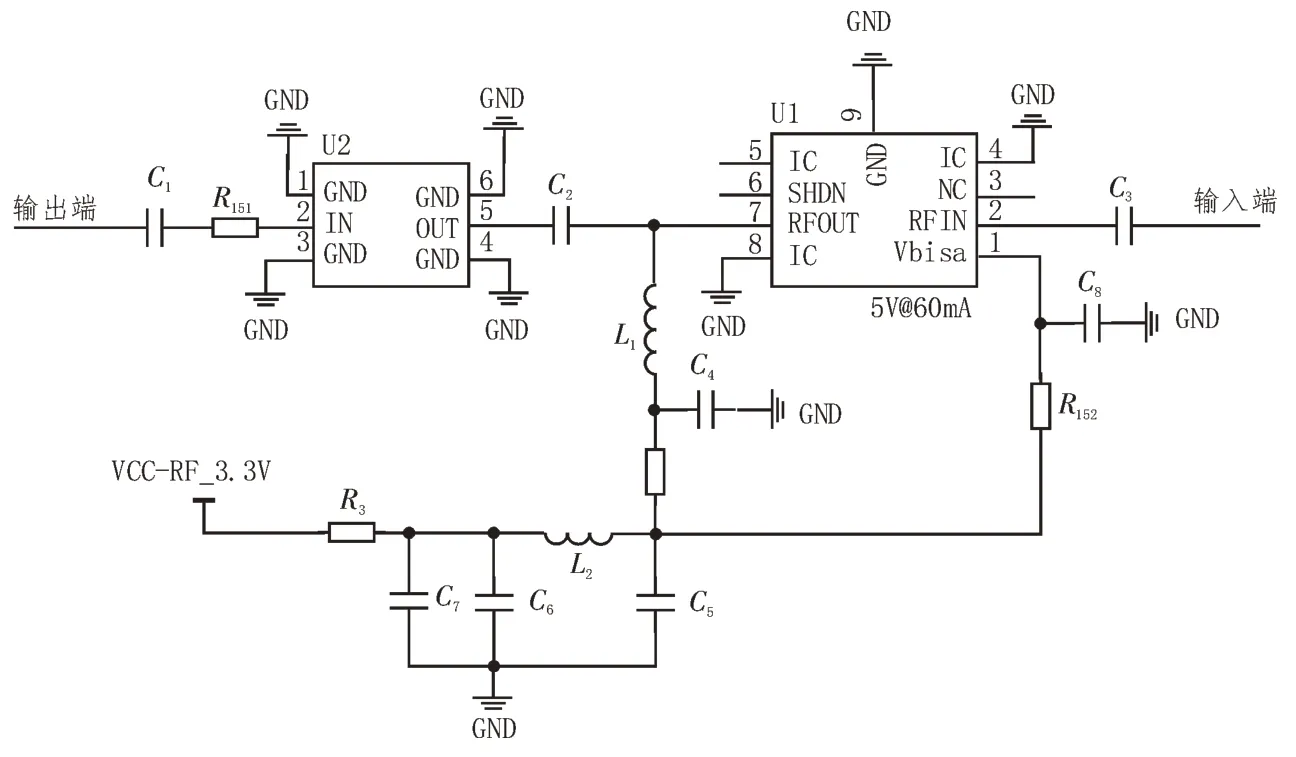
圖3 接收電路
2.2 射頻發射電路
以無人機測控系統法定頻段1 430~1 444 MHz為例,基帶數模轉換后輸出功率為0 dBm 信號,經過增程裝置輸出功率為36 dBm,射頻發射電路設計如圖4 所示。
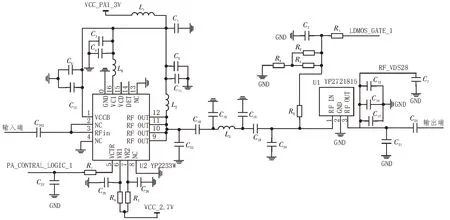
圖4 發射電路
放大電路采用放大器級聯完成,前級放大器為驅動放大器,完成小信號的放大,后級放大器為功率放大器,輸出所需的射頻信號功率。為保證信號處于線性范圍,應進行適當的回退調整[10]。
前級放大器選擇國產品牌因諾訊的YP2233W射頻放大器。該芯片是一款高動態寬帶射頻放大器,InGaP 異質結雙極晶體管(HBT)。其內部包含兩級放大器,提供26 dB 的典型增益,能夠實現0.7~2.7 GHz頻段的放大,1 dB 壓縮點為35 dBm。
后級放大器同樣選用國產品牌因諾訊的YP27 21815LDMOS 場效應功率放大器,供電電壓為28 V,輸出功率為42 dBm。用于700~2 700 MHz 頻段內的信號放大,可工作在AB/B 類和C 類的所有典型調制模式,靜態工作電壓和電流分別為28 V 和100 mA。設計上需注重后級放大器輸入和輸出端的匹配設計,匹配設計通常采用仿真為輔調試為主的原則,以微帶線和電容加載的方式進行[11],避免駐波過大導致高功率信號反射,造成芯片自激甚至燒毀芯片[12]。
2.3 收發切換電路
自主收發切換電路采用檢波電壓控制射頻開關切換。定向耦合器耦合出基帶輸出的射頻信號,經射頻功率檢測電路檢波輸出0.5~1.8 V 線性直流電壓[13],輸入電壓比較器后輸出邏輯高低電平特性,控制射頻單刀雙擲開關。
射頻單刀雙擲開關(SPDT),考慮成本因素,高功率電路選用Skyworks 公司的大功率射頻開關SKY 12207。低功率電路可選擇成本更低的AS139。當AS139 芯片V1 為高電平,V2 為低電平時,J1 與J2 管腳導通;反之,當V1 為低電平,V2 為低電平時,J1 與J3 導通。
收發切換電路如圖5 所示,當處于發射狀態時,有信號輸入耦合器,經耦合器耦合出射頻信號,檢波器同時輸出直流電壓,再經過比較器與設定的電壓值相比,高于設定值輸出高電平(5 V)。通過雙通道高速功率MOS 管TC4428A,一路反向驅動,一路正向驅動,即當INA 和INB 均輸入高電平時,OUTA-輸出為低電平,OUTB 輸出為高電平,反之依次類推。此時J1 和J3 導通。
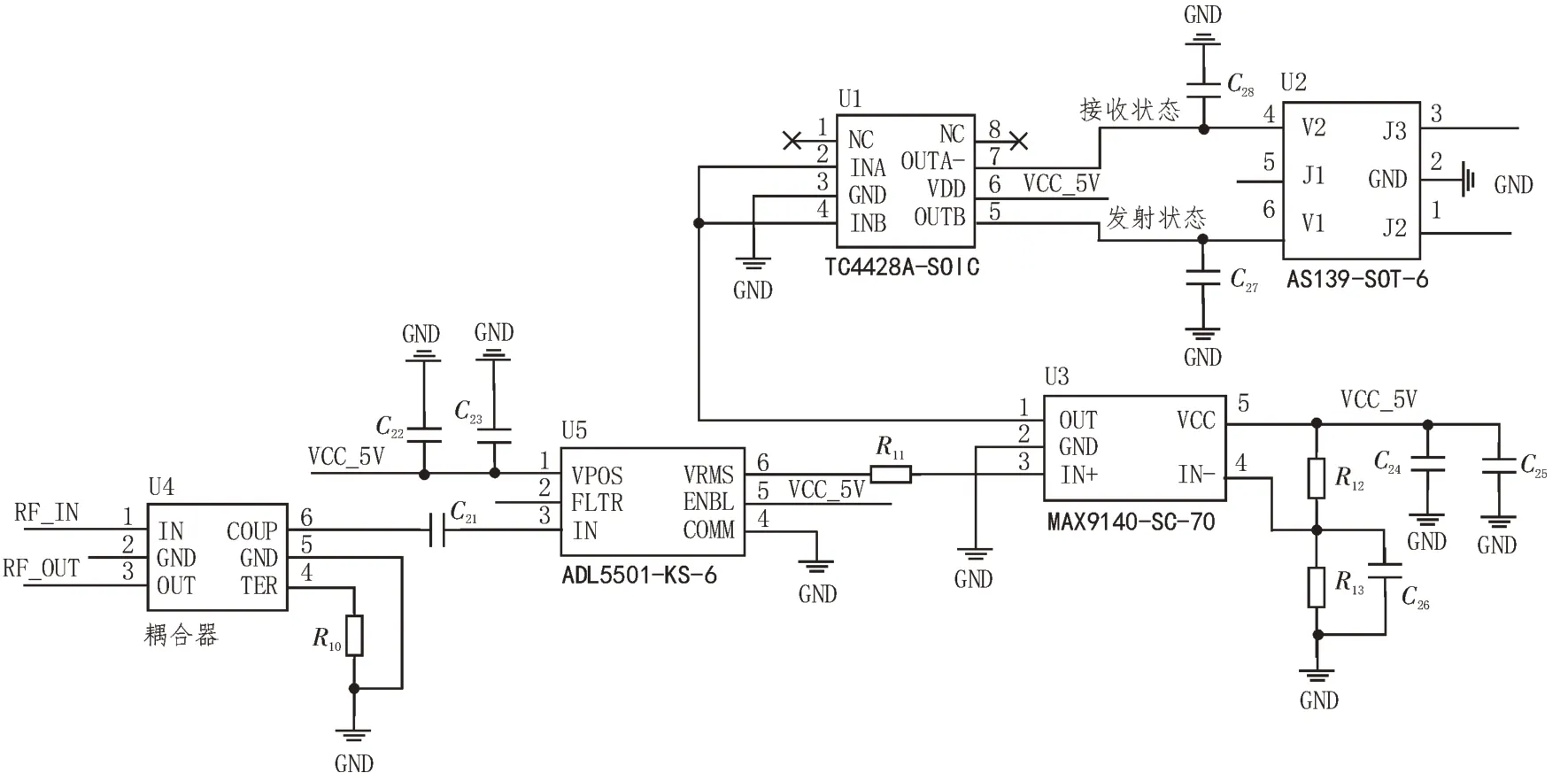
圖5 收發切換電路
當處于接收狀態時,耦合器沒有輸出,檢波電壓為低電平,低于比較器預設值,比較器輸出也為低電平,此時雙通道高速功率MOS 管輸出OUTA 為高電平,OUTB 為低電平,此時J1 和J2 接通。
2.4 抗毀傷電路
抗毀傷電路采用環形器和50 Ω高功率負載電阻配合射頻開關設計,如圖6 所示。
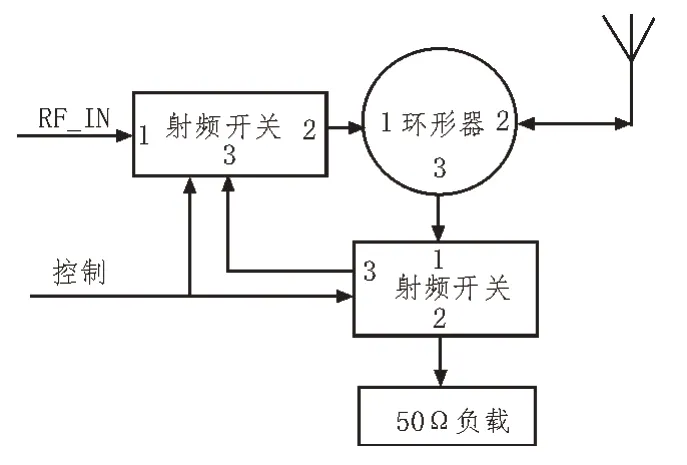
圖6 抗毀傷電路
當處于發射狀態時,兩個射頻開關1-2 接通,信號通過射頻開關進入環形器,環形器將信號從1 口傳輸至2 口,最終通過天線輻射。當處于接收狀態時,射頻開關1-3 接通,天線接收信號,進入環形器2口,由環形器傳輸至環形器3 口,經射頻開關后進入接收通路。
在發射狀態下功放輸出的大功率信號不能及時通過天線輻射出去,會造成信號反射導致芯片自激燒毀[14-15]。為了防止增程模塊在使用和操作過程中未接天線造成損傷,設計中增加了抗毀傷電路,如上文所述發射狀態時,兩個射頻開關1-2 接通,當天線未安裝時,信號會在天線端口全反射,從環形器2 口傳輸至環形器3 口,最終經過射頻開關由50 Ω高功率負載電阻吸收,這樣的設計可以有效地防止損傷設備。
抗毀傷電路涉及大功率器件,在選型射頻開關時必須注意射頻開關能夠承受的最大功率,設計選用Skyworks 公司的一款50 W 大功率硅二極管單刀雙擲開關SKY12207,工作在900 MHz~4 GHz 頻段,具有超低的插損,極好的線性與低直流功耗,納秒級別的開關特性。環形器選擇優譯公司的一款L 波段表貼型低成本鐵氧體環形器UIYSC12A1427T1517。鐵氧體環形器具有小型化、寬頻帶、插損小、大功率的特性[16]。
3 實驗測試及分析
根據上述設計,對增程模塊的原理圖和PCB 電路板進行設計,并完成制板、焊接、調試工作。對其各項性能指標進行測試[17-19]。測試儀器使用到頻譜分析儀、射頻信號源、直流穩壓源、衰減器。測試發射功能的測試環境搭建如圖7 所示。
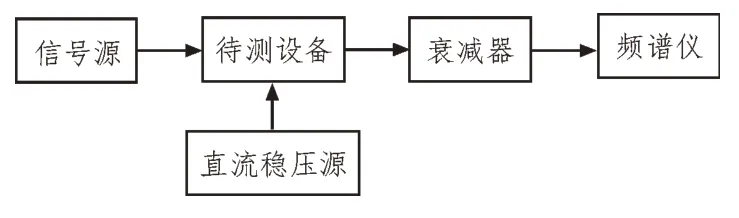
圖7 測試環境
為避免輸出功率過大對儀器造成損壞,增程模塊的輸出端需經過衰減器后接頻譜儀,信號源接增程模塊輸入端,設置信號源輸出0 dBm,改變頻率記錄發射通路數據,如圖8 所示。考慮到功放的線性度,未將功放推至飽和,進行功率回退8 dB 調試,發射通路總增益不小于36 dB。
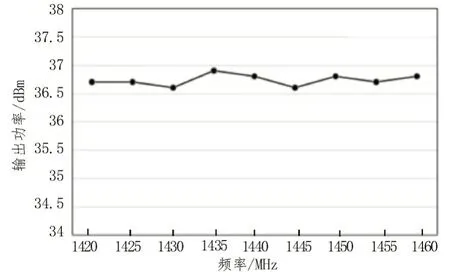
圖8 發射輸出功率
接收通路測試數據如圖9 所示,輸出端接信號源,設置信號源輸出為-60 dBm 小信號,輸入端接頻譜儀,改變頻率記錄接收通路數據,可計算出信號的增益,接收通路增益不小于19 dB。
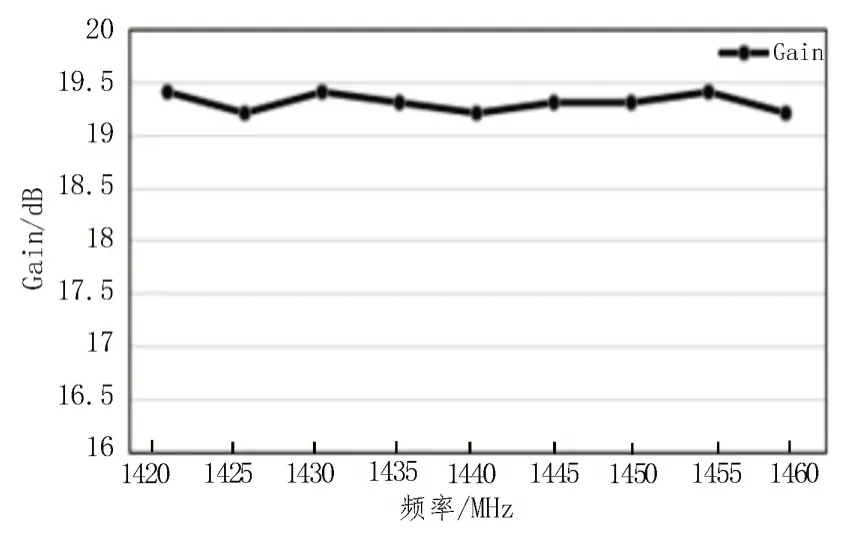
圖9 接收通路增益
抗毀傷性能測試,是在發射狀態下,拆卸掉天線,經過一段時間后,將待測設備的輸出口安裝天線或者接衰減器到頻譜儀測試設備的可靠性。該項實驗在輸出口懸空30 min 后,重新接入頻譜儀,測試并記錄數據如圖10 所示。測試結果與圖8 基本一致。輸出功率降低0.5 dB,是因為功放過熱導致,屬于正常現象,器件未損傷。
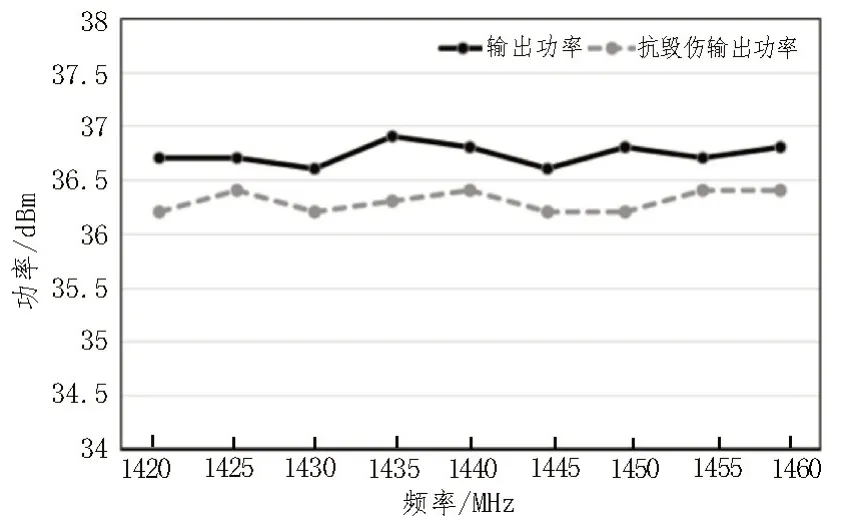
圖10 抗毀傷測試結果
4 結束語
針對目前巡檢類無人機的需求多樣化,設計了一款能夠自主切換接收和發射的增程模塊,具有改裝方便,抗毀傷性強等特點。可根據巡檢需求進行適應性改造,大大降低成本。同時對增程模塊的原理進行了闡述,最終對增程模塊進行了相應功能測試。測試結果表明,該模塊可以用于無人機在法定頻段1 430~1 444 MHz 的時分測控系統,滿足巡檢類無人機不同距離的巡檢需求,此設計同樣可應用于其他頻段。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
