基于線性自抗擾控制的縱向艦載機(jī)直接升力全自動著艦控制
2024-04-09 01:41:52吳啟龍朱齊丹
智能系統(tǒng)學(xué)報(bào) 2024年1期
吳啟龍,朱齊丹
(哈爾濱工程大學(xué) 智能科學(xué)與工程學(xué)院, 黑龍江 哈爾濱 150001)
艦載機(jī)的著艦控制是飛行控制系統(tǒng)的一個重要研究內(nèi)容,目的是提高著艦精度[1]。傳統(tǒng)的艦載機(jī)采用油門控制下滑,俯仰桿控制迎角的控制方法。這種方法有很多缺點(diǎn),如操縱通道的耦合,軌跡和姿態(tài)的耦合,以及著艦精度差等,因此提出了直接升力控制(direct lift control,DLC)用于艦載機(jī)著艦[2-3]。這種技術(shù)直接控制作用在飛機(jī)上的力,從而消除了軌跡和姿態(tài)運(yùn)動的耦合。但是由于艦載機(jī)的最終著艦過程會受到強(qiáng)烈的艦尾流干擾,即使在DLC下,這些干擾也會大大影響著艦精度。如何使艦載機(jī)在干擾作用下快速準(zhǔn)確地跟蹤理想的下滑軌跡,是全自動著艦系統(tǒng)的關(guān)鍵問題。為了使直接升力控制自動著艦系統(tǒng)具有更好的抗干擾能力,需要引入先進(jìn)的控制律來實(shí)現(xiàn)姿態(tài)穩(wěn)定和理想下滑道跟蹤。
對于DLC著艦控制系統(tǒng)的設(shè)計(jì),許多專家設(shè)計(jì)了不同的方案。精密進(jìn)近與著艦的增強(qiáng)引導(dǎo)綜合控制技術(shù)就是利用DLC來提高艦載機(jī)下滑道跟蹤性能。在飛機(jī)上的驗(yàn)證表明,艦載機(jī)著陸偏差被有效降低[4]。但是此設(shè)計(jì)的航母著陸系統(tǒng)仍然是一個人工控制系統(tǒng),由飛行員發(fā)出引導(dǎo)指令。由于DLC系統(tǒng)的姿態(tài)和軌跡解耦性較差,因此設(shè)計(jì)了一種模糊動態(tài)逆控制器[5],可以實(shí)現(xiàn)DLC,具有良好的魯棒性,在動態(tài)響應(yīng)方面優(yōu)于常規(guī)動態(tài)逆控制器。然而,動態(tài)逆DLC著艦系統(tǒng)在很大程度上依賴于準(zhǔn)確的飛機(jī)模型,當(dāng)飛機(jī)模型數(shù)據(jù)不準(zhǔn)確時,動態(tài)逆向控制器的性能會急劇下降。在文獻(xiàn)[6]中,這種設(shè)計(jì)方法雖然可以保證DLC模式的實(shí)現(xiàn),但在實(shí)現(xiàn)中需要根據(jù)不同的飛行狀態(tài)求解合適的增益參數(shù),因此很難實(shí)現(xiàn)飛行軌跡與姿態(tài)的真正解耦。H無窮控制策略被應(yīng)用于飛行控制系統(tǒng)的設(shè)計(jì),提高了系統(tǒng)的魯棒性能[7-8]。然而,這種方法在處理高增益系統(tǒng)和設(shè)計(jì)高階控制器時過于復(fù)雜。文獻(xiàn)[9-10]將自適應(yīng)模糊控制方法應(yīng)用到飛行控制中,與傳統(tǒng)控制方案相比,它提高了著艦精度。此方法解決了艦載機(jī)著艦?zāi)P椭械膹?qiáng)時變性、參數(shù)不確定性、復(fù)雜環(huán)境干擾等問題。然而,當(dāng)模型發(fā)生重大變化時,自適應(yīng)控制器的參數(shù)往往不能及時調(diào)整。因此,自抗擾控制(active disturbance rejection control,ADRC)得到了越來越多的關(guān)注。
ADRC已被成功地應(yīng)用于許多領(lǐng)域。許多學(xué)者都給出了不同的設(shè)計(jì)方案,如非線性飛機(jī)模型姿態(tài)控制[11]、電力驅(qū)動速度控制[12]、解決高超音速飛行器控制系統(tǒng)中的耦合和干擾問題[13]以及無人駕駛飛機(jī)的可視化著陸系統(tǒng)[14]。然而,ADRC包含非線性函數(shù)和許多可調(diào)參數(shù),這使得參數(shù)調(diào)整更加復(fù)雜。因此,文獻(xiàn)[15]引入帶寬的概念,將非線性ADRC轉(zhuǎn)化為由線性擴(kuò)張狀態(tài)觀測器(linear extended state observer,LESO)和比例-微分控制器(proportional-derivative controller,PD)組成的LADRC。LADRC大大簡化了參數(shù)的設(shè)置,使得LADRC技術(shù)在各個領(lǐng)域得到了更廣泛的應(yīng)用。文獻(xiàn)[16]為四旋翼無人機(jī)設(shè)計(jì)了一種滑模控制和LADRC相結(jié)合的控制方法,以解決在有干擾的情況下,無人機(jī)對參考信號的穩(wěn)定跟蹤。文獻(xiàn)[17]介紹了一種自適應(yīng)LADRC控制器,以實(shí)現(xiàn)強(qiáng)大的抗干擾性能并降低機(jī)電執(zhí)行器的噪聲敏感性。雖然LADRC具有上述優(yōu)點(diǎn),但當(dāng)艦載機(jī)受到外部干擾和LESO估計(jì)誤差的影響時,一組固定的反饋率參數(shù)使得控制效率不盡人意。徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)(radial basis function neural network, RBFNN)由于具有學(xué)習(xí)和自適應(yīng)能力,可以有效控制復(fù)雜的不確定系統(tǒng)[18-20]。為了簡化參數(shù)調(diào)整過程,增強(qiáng)控制器的抗干擾能力,使自動著艦控制系統(tǒng)在外界干擾下能快速穩(wěn)定地沿理想下滑道飛行。本文提出了一種利用徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)對LADRC參數(shù)進(jìn)行在線自動調(diào)整的新方法,并將該策略應(yīng)用于直接升力控制自動著艦系統(tǒng)中。利用Lyapunov穩(wěn)定性理論分析了控制系統(tǒng)的穩(wěn)定性,并將仿真結(jié)果與傳統(tǒng)的LADRC、比例-積分-微分控制器(proportional-integral-derivative controller,PID)控制方案、反向傳播神經(jīng)網(wǎng)絡(luò)結(jié)合線性自抗擾控制(back propagation neural network combined with liner active disturbance rejection control,BP-LADRC)以及自適應(yīng)滑膜控制進(jìn)行了比較。結(jié)果表明,該方法能夠快速、穩(wěn)定地跟蹤理想下滑道,并且對外部干擾具有良好的魯棒性。
1 著艦?zāi)P徒?/h2>
艦載機(jī)著艦如圖1所示。本節(jié)介紹縱向飛機(jī)模型和艦尾流模型。

圖1 艦載機(jī)著艦階段Fig.1 Carrier-based aircraft landing phase
1.1 艦載機(jī)縱向非線性模型
艦載機(jī)的縱向飛行狀態(tài)選擇在沒有大氣干擾的情況下以70 m/s的恒定速度直線飛行,迎角為9.1°,襟翼偏轉(zhuǎn)為20°,飛行軌跡角為-3.5°,3個控制效應(yīng)器為升降舵δe、襟翼δf和油門桿δpl。艦載機(jī)的縱向方程如下[21]。
力方程:
導(dǎo)航方程:
力矩方程:
飛機(jī)的阻力、升力和俯仰力矩分別為
式中:V為速度,γ為飛行軌跡角,α為迎角,q為俯仰角速率,θ為俯仰角,CM、CD和CL分別為俯仰力矩系數(shù)、升力系數(shù)和阻力系數(shù),ρ為空氣密度,h為高度,Iyy為俯仰慣性力矩,P為發(fā)動機(jī)推力,M為俯仰力矩。
1.2 艦尾流建模
采用美國軍事標(biāo)準(zhǔn)MIL-F-8785C對艦尾流建模[22]。艦尾流由水平縱向部分u、水平橫向部分v和垂直部分w等3個部分組成:
式中:u1、v1、w1為自由大氣紊流分量,u2、w2為穩(wěn)態(tài)分量,u3、w3為周期性分量,u4、v4、w4為隨機(jī)性分量。
1.3 艦載機(jī)在艦尾流擾動時的縱向線性模型
飛機(jī)在遇到陣風(fēng)時,空氣動力學(xué)會發(fā)生瞬變[23-25]。為了通過線性模型分析艦尾流對飛行狀態(tài)的影響,根據(jù)以下思路對縱向線性模型進(jìn)行擴(kuò)展。本文只研究飛機(jī)縱向運(yùn)動,因此可以忽略水平橫向部分的影響。
如果u>0,在空氣動力學(xué)上相當(dāng)于空速的降低,關(guān)系為
如果w>0,飛行狀態(tài)立即發(fā)生變化,如圖2所示,考慮到風(fēng)速通常遠(yuǎn)小于飛行速度,v和vI之間的角約等于w/v*,因此:

圖2 艦尾流中姿態(tài)和空速的關(guān)系Fig.2 Relationship between attitude and airspeed in carrier air-wake
假設(shè)風(fēng)速參考值為零,因此Δu=u,Δw=w;則帶艦尾流擾動的飛機(jī)縱向線性模型為
2 控制器設(shè)計(jì)
2.1 通過RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化的LADRC
對于如下二階系統(tǒng):
為了使輸出跟蹤參考信號,有必要設(shè)計(jì)二階RBFLADRC方案。下面將詳細(xì)介紹該控制器的構(gòu)造。
1)線性跟蹤微分器。
線性跟蹤微分器(linear tracking differentiator,LTD)的具體實(shí)現(xiàn)為
式中:xd為期望值;xd1為軟化后的期望值;xd2為xd1的微分信號;r為快速因子,用于調(diào)整過渡過程的速度。
2)線性擴(kuò)展?fàn)顟B(tài)觀測器。
將二階系統(tǒng)中的總擾動視為擴(kuò)展?fàn)顟B(tài)變量:
在式(4)的基礎(chǔ)上建立一個三階LESO為
式中:為對x1的精確估計(jì);為對整體擾動的估計(jì);βi(i=1,2,3)為觀測器增益,β1=3w0,β2=3w20,β3=w30,其中w0為觀測器帶寬[26]。
3)線性狀態(tài)誤差反饋。
在LESO準(zhǔn)確估計(jì)總擾動的情況下,設(shè)計(jì)控制器為
忽略估計(jì)誤差,將系統(tǒng)降為級聯(lián)積分系統(tǒng)為
由于LTD對參考信號的精確跟蹤和對輸出信號的精確估計(jì),級聯(lián)積分器系統(tǒng)可以很容易地由PD控制器控制:
為了簡化參數(shù)設(shè)置,引入RBF神經(jīng)網(wǎng)絡(luò)對kp和kd進(jìn)行實(shí)時調(diào)整。
RBF神經(jīng)網(wǎng)絡(luò)是3層前饋網(wǎng)絡(luò),只有一個隱含層[27],如圖3所示。RBF神經(jīng)網(wǎng)絡(luò)模擬了人腦中局部調(diào)節(jié)的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),已經(jīng)證明RBF神經(jīng)網(wǎng)絡(luò)可以以任意的精度近似任何連續(xù)函數(shù)[28]。

圖3 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)Fig.3 RBF neural network structure diagram
選擇X=[u(k)y(k)y(k-1)]T作為RBFNN的輸入向量。
RBFNN的性能指標(biāo)函數(shù)為
根據(jù)梯度下降法,輸出權(quán)重向量、節(jié)點(diǎn)中心向量和節(jié)點(diǎn)基寬參數(shù)的迭代算法為
式中:η為學(xué)習(xí)率,α為動量因子。
RBFNN的Jacobian信息為
式中x1=u(k)。
梯度下降法被用來調(diào)整kp和kd:
基于RBF神經(jīng)網(wǎng)絡(luò)的LADRC控制系統(tǒng)的結(jié)構(gòu)如圖4所示。
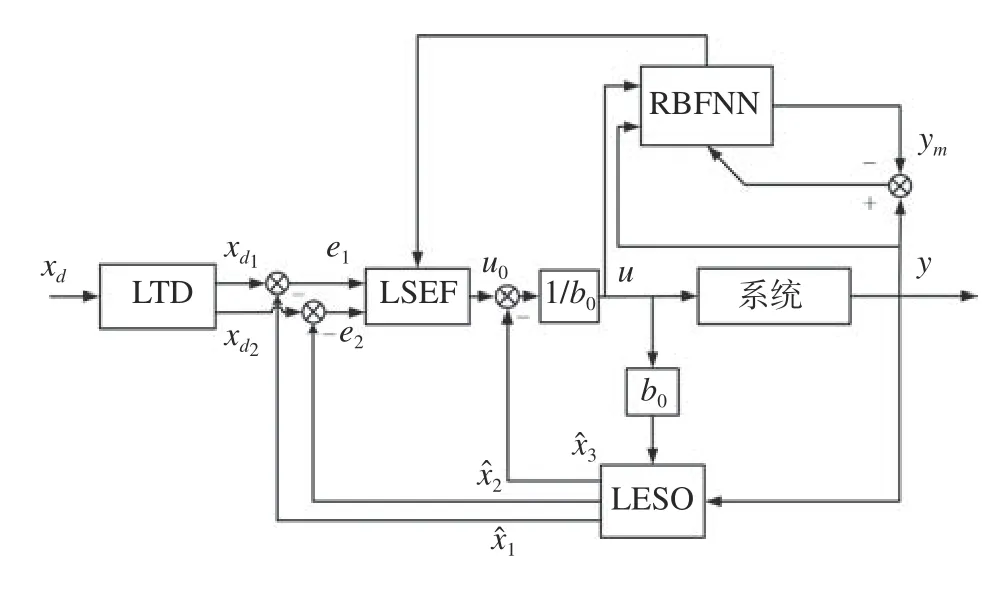
圖4 基于RBF神經(jīng)網(wǎng)絡(luò)的LADRC結(jié)構(gòu)Fig.4 Structure of RBF neural network based on LADRC
2.2 穩(wěn)定性分析
本節(jié)分析ESO收斂性和引入RBFNN后的閉環(huán)系統(tǒng)的穩(wěn)定性。
ESO估計(jì)誤差定義為
式(5)和式(7)結(jié)合起來,可以得到如下ESO估計(jì)誤差形式:
式(8)可以表示為
式(9)的解為
設(shè)
設(shè)ξmax(0)=|ξ1(0)|+|ξ2(0)|+|ξ3(0)|, 對于任意時間t≥T>0,i= 1, 2, 3,可以得到:
設(shè)Emax(0)=|E1(0)|+|E2(0)|+|E3(0)|,根據(jù)ξi(t)=Ei(t)/,可知:
從上述分析可以看出,ESO的估計(jì)誤差的上界隨著觀測器帶寬的增加而單調(diào)地減少。
為了分析系統(tǒng)的閉環(huán)穩(wěn)定性,構(gòu)造Lyapunov函數(shù)為
根據(jù)式(10),得出Lyapunov函數(shù)的變化量為
權(quán)重的變化量為
其中:
誤差方程的線性化模型可以表示為
使用式(6)可以得到:
使用式(12)、(13)可以得到:
根據(jù)式(11)、(14),ΔV(k)可以表示為
如果ηx選擇為
則式(15)中的ΔV(k)值將小于零。因此V>0和<0,根據(jù) Lyapunov 穩(wěn)定性定理,閉環(huán)系統(tǒng)漸近穩(wěn)定。
3 直接升力自動著艦系統(tǒng)的設(shè)計(jì)
在本節(jié)中,基于RBF-LADRC的艦載機(jī)直接升力控制自動著艦系統(tǒng)的設(shè)計(jì)如圖5所示。

圖5 基于RBF-LADRC的直接升力自動著艦系統(tǒng)示意Fig.5 Diagram of the direct lift automatic landing system based on RBF-LADRC
RBF-LADRC的設(shè)計(jì)將針對縱向引導(dǎo)律、姿態(tài)輔助控制通道和APCS進(jìn)行。詳細(xì)的設(shè)計(jì)過程將在下文中說明。
3.1 姿態(tài)輔助通道控制器設(shè)計(jì)方案
迎角、俯仰角和軌跡角之間的關(guān)系為
將式(16)代入式(2),可以得到方程:
式(17)在參考點(diǎn)的線性化被擴(kuò)展為以下方程:
升力的線性化為
將式(19)代入式(18),式(18)變?yōu)?/p>
設(shè)
升降舵的傳遞函數(shù)是一個一階慣性環(huán)節(jié),所以式(20)變成了二階形式:
將迎角回路中的總擾動視為擴(kuò)展的狀態(tài)變量:
在式(22)的基礎(chǔ)上建立三階LESO為
定義迎角誤差和迎角誤差的微分,其中αd1和αd2是期望迎角輸入通過LTD后得到的跟蹤和微分信號:
將這2個誤差進(jìn)行線性組合,并對迎角控制回路的總干擾進(jìn)行前饋補(bǔ)償,得到最終的控制信號u1為
根據(jù)上述RBF-LADRC設(shè)計(jì)方法設(shè)計(jì)參數(shù)kp和kd,采用梯度下降法調(diào)整kp1和kd1。
3.2 進(jìn)近動力補(bǔ)償系統(tǒng)控制器設(shè)計(jì)方案
進(jìn)場動力補(bǔ)償系統(tǒng)(approach power compensation system,APCS)用于自動調(diào)整油門以控制飛機(jī)的進(jìn)場速度。
式(1)在參考點(diǎn)的線性化被擴(kuò)展為
推力的變化量為
將式(24)代入式(23),可得:
令:
油門桿作動器傳遞函數(shù)是一個一階慣性環(huán)節(jié),所以式(25)變成了如下的二階形式:
建立三階RBF-LADRC為
根據(jù)上述RBF-LADRC設(shè)計(jì)方法設(shè)計(jì)參數(shù)kp2和kd2,用梯度下降法來調(diào)整kp2和kd2。
3.3 縱向引導(dǎo)律控制器設(shè)計(jì)方案
艦載機(jī)在著艦過程中受到艦尾流干擾。因此,可以使用RBF-LADRC的縱向引導(dǎo)律來有效抑制干擾。
式(3)在參考點(diǎn)的線性化被擴(kuò)展為以下方程:
令:
則此時式(26)可寫為
將高度環(huán)路中的總擾動視為擴(kuò)展?fàn)顟B(tài),建立線性擴(kuò)展?fàn)顟B(tài)觀測器為
定義誤差信號為
對這2個誤差進(jìn)行線性組合,并對高度控制回路的總擾動進(jìn)行前饋補(bǔ)償,得到最終控制信號u為
根據(jù)上述RBF-LADRC設(shè)計(jì)方法,采用梯度下降法對參數(shù)kp3進(jìn)行設(shè)計(jì)。
4 著艦仿真結(jié)果
當(dāng)艦載機(jī)進(jìn)入下滑道入口時,初始條件設(shè)定為:艦載機(jī)的飛行高度為h0=114.3m,艦載機(jī)理想著陸點(diǎn)的參考高度為hc=21.1m,參考速度為V0=70m/s。迎角控制在α0=9.1°,軌跡角控制在γ0=-3.5°。在仿真中,RBF-LADRC被應(yīng)用于艦載機(jī)直接升力控制自動著艦系統(tǒng)以驗(yàn)證其著艦性能。此外,RBF-LADRC方案的著艦性能與傳統(tǒng)的LADRC、PID、BP-LADRC以及自適應(yīng)滑膜控制進(jìn)行了比較。
控制器參數(shù)設(shè)置為:三通道觀測器帶寬為w1=10,w2=10,w3=3.5;RBF神經(jīng)網(wǎng)絡(luò)參數(shù)設(shè)置為學(xué)習(xí)率η=0.25,動量因子α=0.05,m=6。
縱向線性小擾動方程的矩陣具體參數(shù)為
4.1 LESO輸出估計(jì)
從圖6可以看出,通過LESO對三通道輸出進(jìn)行估計(jì),精度高,響應(yīng)快,有利于提高所提控制方案的抗干擾能力。

圖6 LESO對輸出變化量的估計(jì)Fig.6 Estimate of the output variation by LESO
4.2 艦尾流擾動下著艦仿真結(jié)果與分析
1)穩(wěn)定性比較。
從圖7可以看出,當(dāng)不引入RBFNN時,傳統(tǒng)LADRC的迎角偏差比較大。所提方法與PID相比,雖然偏差變化不明顯,但迎角的波動明顯減慢。通過對比分析,新設(shè)計(jì)方法下的迎角更加穩(wěn)定。從圖8可以看出,所提方法的速度擾動變化明顯低于其他控制方法。相比之下,新設(shè)計(jì)方法的速度穩(wěn)定性得到了較好的保持,并且可以有效地抑制艦尾流擾動。

圖7 迎角變化量對比Fig.7 Comparison of the AOA variation

圖8 速度變化量對比Fig.8 Comparison of the velocity variation
從圖9和圖10可以看出,引入RBFNN后,與傳統(tǒng)的LADRC相比,所提方法的俯仰角偏差和俯仰率偏差波動明顯減小,最大偏差值降低。相比之下,在RBF-LADRC方法下,艦載機(jī)的飛行姿態(tài)可以得到更好的保持。減少飛行姿態(tài)的偏差可以使航母飛機(jī)更平穩(wěn)地降落,增強(qiáng)系統(tǒng)的穩(wěn)定性。

圖9 俯仰角速率變化量對比Fig.9 Comparison of the pitch angle rate variation

圖10 俯仰角變化量對比Fig.10 Comparison of the pitch angle variation
2)軌跡跟蹤性能比較。
圖11比較了所提方法與其他4種方法的軌跡角偏差,其中所提方法是指本文提出的RBF-LADRC控制器。比較分析表明,在艦尾流的影響下,RBF-LADRC能更好地保持軌跡角的穩(wěn)定性。在自動著艦?zāi)J较拢€(wěn)定的軌跡角表明此設(shè)計(jì)可以安全地完成著艦任務(wù)。圖11給出了所提方法和其他4種方法的軌跡跟蹤比較。高度偏差表示仿真結(jié)果與理想下滑道之間的偏差。可以看出,基于RBF-LADRC的艦載機(jī)直接升力自動著艦系統(tǒng)的跟蹤誤差在0.2 m以內(nèi)。艦載機(jī)沿著理想的下滑路徑著艦。通過穩(wěn)定性比較部分可以看出,RBF-LADRC略優(yōu)于BP-LADRC方法,但是軌跡跟蹤性能仿真結(jié)果表明,所提出的基于RBFLADRC的艦載機(jī)直接升力自動著艦系統(tǒng)在有艦尾流干擾的情況下能更好地跟蹤理想下滑道。

圖11 飛行軌跡對比Fig.11 Comparison of flight path
4.3 執(zhí)行器故障時著艦仿真結(jié)果與分析
為進(jìn)一步驗(yàn)證本文設(shè)計(jì)的RBF-LADRC的魯棒性,當(dāng)執(zhí)行器存在以下時變故障情況時進(jìn)行仿真分析。發(fā)動機(jī)故障δpf=10sinπt/2.5(°)在t=4s處引入;升降舵故障 δef=8sinπt/2.5(°)在t=5s引入。
1)穩(wěn)定性比較。
從圖12~15可以看出,與其他方法相比,當(dāng)飛機(jī)遭受干擾和時變故障時,所提出的方法的姿態(tài)角和速度更加穩(wěn)定。

圖12 迎角變化量對比Fig.12 Comparison of the AOA variation

圖13 速度變化量對比Fig.13 Comparison of the velocity variation

圖14 俯仰角速率變化量對比Fig.14 Comparison of the pitch angle rate variation

圖15 俯仰角變化量對比Fig.15 Comparison of the pitch angle variation
2)軌跡跟蹤性能比較。
從圖16可以看出,所提出方法的軌跡角和高度變化均小于其他的控制方法,可以更好地跟蹤理想下滑道的誤差。


圖16 飛行軌跡對比Fig.16 Comparison of flight path
5 結(jié)束語
1)本文設(shè)計(jì)了基于RBFNN結(jié)合線性自抗擾控制的艦載機(jī)直接升力自動著艦系統(tǒng),能夠較好地抑制艦尾流的擾動。對著艦系統(tǒng)進(jìn)行仿真并與PID 控制器和傳統(tǒng)LADRC進(jìn)行對比,結(jié)果表明該方法不僅抑制了艦尾流擾動,準(zhǔn)確補(bǔ)償了擾動造成的偏差,而且顯著提高了系統(tǒng)的性能和魯棒性,并能保持軌跡角的穩(wěn)定性。
2)從仿真結(jié)果可以看出,所設(shè)計(jì)的控制方案是有效的,其設(shè)計(jì)思想和方法值得借鑒,如可應(yīng)用于旋翼機(jī)、固定翼飛機(jī)、推力矢量飛機(jī)等。
3)未來將進(jìn)一步研究如何利用該方法的魯棒性和學(xué)習(xí)能力處理著艦系統(tǒng)的控制輸入飽和、襟翼執(zhí)行器故障等復(fù)雜控制問題。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56