一種多策略改進(jìn)鯨魚優(yōu)化算法的混沌系統(tǒng)參數(shù)辨識
2024-04-09 01:42:02潘悅悅吳立飛楊曉忠
智能系統(tǒng)學(xué)報(bào) 2024年1期
潘悅悅,吳立飛,楊曉忠
(1.華北電力大學(xué) 控制與計(jì)算機(jī)工程學(xué)院, 北京 102206; 2.華北電力大學(xué) 數(shù)理學(xué)院信息與計(jì)算研究所, 北京 102206)
在非線性科學(xué)領(lǐng)域,混沌系統(tǒng)的控制與同步是研究熱點(diǎn),其在信息科學(xué)、保密通信等方面應(yīng)用廣泛[1-2],準(zhǔn)確的混沌系統(tǒng)模型是實(shí)現(xiàn)同步控制的基礎(chǔ)。然而,實(shí)際應(yīng)用中,混沌系統(tǒng)結(jié)構(gòu)復(fù)雜,部分參數(shù)不可知,因此精確辨識混沌系統(tǒng)參數(shù)具有重要的現(xiàn)實(shí)意義[3-4]。
近年來,許多學(xué)者開始關(guān)注和研究混沌系統(tǒng)參數(shù)辨識問題,并應(yīng)用智能優(yōu)化算法辨識系統(tǒng)參數(shù)。Chen等(2019年)[5]使用改進(jìn)花授粉算法估計(jì)混沌和超混沌系統(tǒng)參數(shù)。數(shù)值模擬證明了新算法的有效性和魯棒性。Ahandani等(2020年)[6]提出一種混洗復(fù)雜進(jìn)化算法解決混沌系統(tǒng)參數(shù)估計(jì)問題,數(shù)值結(jié)果表明改進(jìn)算法提高了參數(shù)估計(jì)的收斂速度和精度。Turgut等(2021年)[7]使用單元拓?fù)涓倪M(jìn)鯨魚算法和正余弦算法,辨識混沌系統(tǒng)參數(shù),測試結(jié)果證明,新算法成功地解決了參數(shù)識別問題。Ebrahimi等(2021年)[8]提出了一種改進(jìn)洛茲映射混沌優(yōu)化算法,數(shù)值結(jié)果表明,改進(jìn)算法能夠高效、準(zhǔn)確地估計(jì)混沌系統(tǒng)參數(shù)。
鯨魚優(yōu)化算法(whale optimization algorithm,WOA)是一種新型群智能算法[9],具有搜索能力強(qiáng)、計(jì)算穩(wěn)定等特點(diǎn),在最優(yōu)控制、光伏系統(tǒng)等方面應(yīng)用廣泛[10-11]。然而WOA存在全局和局部搜索不平衡,易陷入局部最優(yōu)等問題,因此國內(nèi)外學(xué)者對WOA進(jìn)行了有效的改進(jìn)。Chen等(2020年)[12]提出一種準(zhǔn)對立混沌WOA(whale optimization algorithm with chaos mechanism based on quasi-opposition, OBCWOA),數(shù)值仿真結(jié)果證明了改進(jìn)算法的全局搜索能力。Chen等(2020年)[13]為提高WOA的收斂精度和速度,提出一種雙自適應(yīng)隨機(jī)備用增強(qiáng)WOA(reinforced whale optimization algorithm, RDWOA)。仿真結(jié)果驗(yàn)證了RDWOA的有效性。Chakraborty等(2021年)[14]為解決高維問題,結(jié)合多種策略,提出一種增強(qiáng)WOA(enhanced whale optimization algorithm, eWOA),測試結(jié)果表明所提算法能有效解決高維問題。Shen等(2023年)[15]提出一種多策略進(jìn)化WOA(whale optimization algorithm based on multi-population evolution,MEWOA),試驗(yàn)結(jié)果證明了MEWOA求解優(yōu)化問題的有效性。Deng等(2023年)[16]提出了一種具有多策略混合算法的改進(jìn)WOA(improved whale optimization algorithm, IWOA),仿真結(jié)果表明,IWOA有較好的收斂速度和穩(wěn)定性。
以上改進(jìn)算法雖然有一定提升,但在收斂精度和速度方面仍有待提高,本文在已有工作的基礎(chǔ)上,以WOA為基礎(chǔ),使用Chebyshev混沌映射產(chǎn)生均勻分布種群,增加初始種群多樣性。將收斂因子非線性化,增加自適應(yīng)權(quán)重,兼顧全局搜索和局部挖掘。動態(tài)選擇自適應(yīng)t分布或蟻獅優(yōu)化算法[17-18],跳出局部最優(yōu)。通過對10個基準(zhǔn)函數(shù)和高維測試函數(shù)進(jìn)行仿真試驗(yàn),驗(yàn)證了MIWOA的優(yōu)越性。將MIWOA應(yīng)用于Ro¨ssler和Lu¨混沌系統(tǒng)參數(shù)辨識,仿真結(jié)果證明了MIWOA辨識混沌系統(tǒng)參數(shù)的有效性。
1 多策略改進(jìn)鯨魚優(yōu)化算法的建立
1.1 基本W(wǎng)OA
WOA模擬了鯨魚捕食行為,其仿生學(xué)原理描述如下:
1) 包圍捕食階段。
鯨魚尋找食物時(shí),當(dāng)前鯨魚根據(jù)最佳鯨魚位置更新自身位置,公式為
式中:a=2-2t/T,t和T分別為當(dāng)前迭代次數(shù)和最大迭代次數(shù),X*(t)和X(t)分別為最佳鯨魚位置和當(dāng)前位置,r1、r2為[0,1]的隨機(jī)數(shù)。
2) 螺旋更新階段。
在螺旋更新位置時(shí),鯨魚通過螺旋向上的方式,靠近群體中最優(yōu)位置,更新公式為
式中:D′為第i只鯨魚和獵物之間的距離,b為改變螺旋形狀的常數(shù),l為[-1,1]中的隨機(jī)數(shù)。
在鯨魚搜索獵物時(shí),收縮包圍和螺旋更新同步進(jìn)行,位置更新公式為
式中p為[0,1]之間的隨機(jī)數(shù)。
3) 隨機(jī)搜尋階段。
鯨魚通過|A|大小,選擇隨機(jī)搜尋或者包圍捕食。當(dāng)|A|>1時(shí),鯨魚在包圍圈外,通過隨機(jī)搜尋獲得獵物信息,位置更新公式為
式中Xrand為當(dāng)前的一個隨機(jī)鯨魚位置。
1.2 WOA的改進(jìn)
WOA初始化種群時(shí)采用隨機(jī)搜索策略,全局搜索能力弱。包圍捕食和螺旋更新階段,收斂因子線性遞減不能平衡全局和局部搜索。算法后期容易陷入局部最優(yōu)。針對以上缺點(diǎn),本文通過Chebyshev混沌映射初始化種群。包圍捕食和螺旋更新階段,非線性化收斂因子,加入自適應(yīng)權(quán)重。算法后期,動態(tài)使用自適應(yīng)t分布或蟻獅優(yōu)化算法更新鯨魚位置,對WOA進(jìn)行改進(jìn)。
1) Chebyshev混沌映射。
Chebyshev混沌映射對初值敏感[19],可產(chǎn)生大量無周期實(shí)值序列。本文采用Chebyshev混沌映射對WOA進(jìn)行種群初始化,迭代方式為
式中k為階次。Chebyshev映射迭代1 000次的分布如圖1所示。
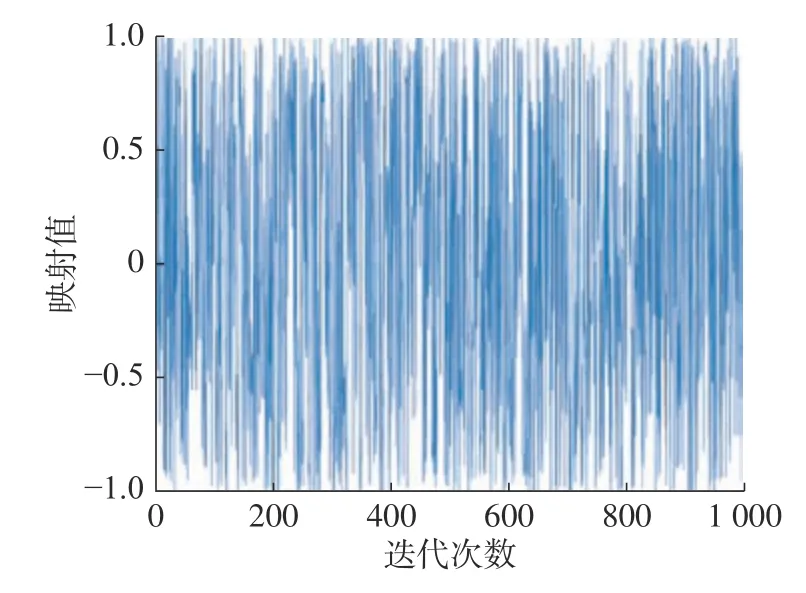
圖1 Chebyshev映射分布Fig.1 Chebyshev map distribution
由圖1可知,映射值分布于[-1,1],Chebyshev混沌映射能更均衡地選取初始種群。將Chebyshev混沌序列映射到WOA解空間中,規(guī)定鯨魚種群數(shù)為N,隨機(jī)產(chǎn)生第1只鯨魚個體向量,Y=(y1,y2,···,yd)。使用式(10)對Y的各維進(jìn)行n-1次迭代,產(chǎn)生其余的n-1只鯨魚。映射生成n只鯨魚個體為
式中:ud和ld分別為搜索空間第d維的上下界,yid和xid分別為第d維的第i只鯨魚和第i只鯨魚的坐標(biāo)值。
2) 非線性收斂因子和自適應(yīng)權(quán)重。
WOA中,參數(shù)A∈[-a,a]調(diào)節(jié)全局搜索和局部挖掘。當(dāng)|A|≥1時(shí),算法進(jìn)行全局搜索,當(dāng)|A|<1時(shí),算法進(jìn)行局部挖掘。隨著迭代的進(jìn)行,a=2-2t/T線性遞減不能體現(xiàn)實(shí)際優(yōu)化過程,因此改進(jìn)收斂因子,公式為[20]
式中:u為大于零的常數(shù),調(diào)節(jié)a的衰減程度。T=500時(shí),圖2為a隨u的變化曲線。
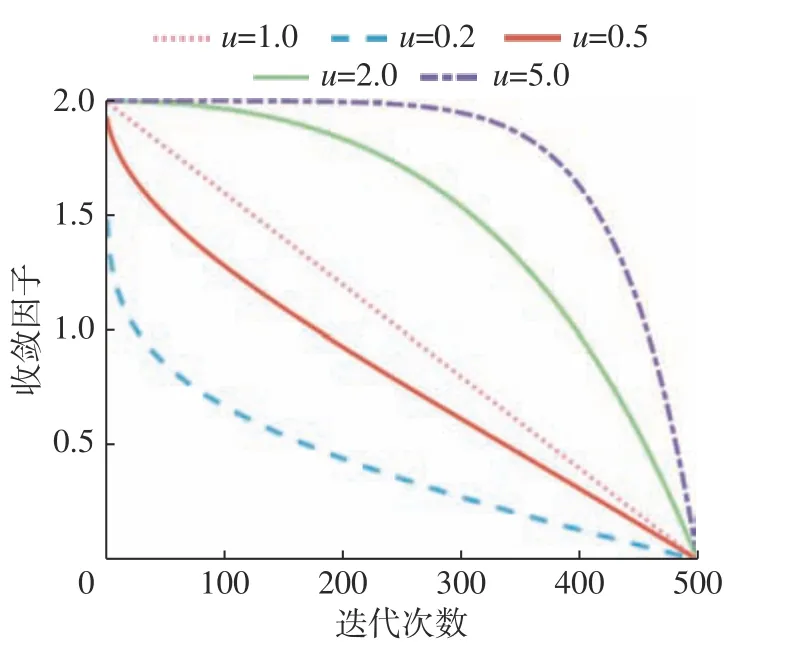
圖2 a的衰減曲線Fig.2 Attenuation curves of a
如圖2,與WOA相比,u越大,a>1所占的迭代次數(shù)比例越大,算法全局搜索能力越強(qiáng),局部挖掘能力越弱。反之,u越小,a<1所占的比例越大,算法局部挖掘能力越強(qiáng),全局搜索能力越弱。所以a的變化趨勢很大程度地影響優(yōu)化求解。由于本文提出的Chebyshev混沌映射初始化種群策略,可以有效提高算法全局搜索能力,故選取u=0.6,增強(qiáng)局部挖掘能力,加快收斂速度,提高精度。
針對WOA后期局部挖掘時(shí),權(quán)重固定,不利于算法尋優(yōu),本文提出一種自適應(yīng)權(quán)重策略,公式為
3) 自適應(yīng)t分布。
t分布又稱學(xué)生分布,概率密度函數(shù)為[17]
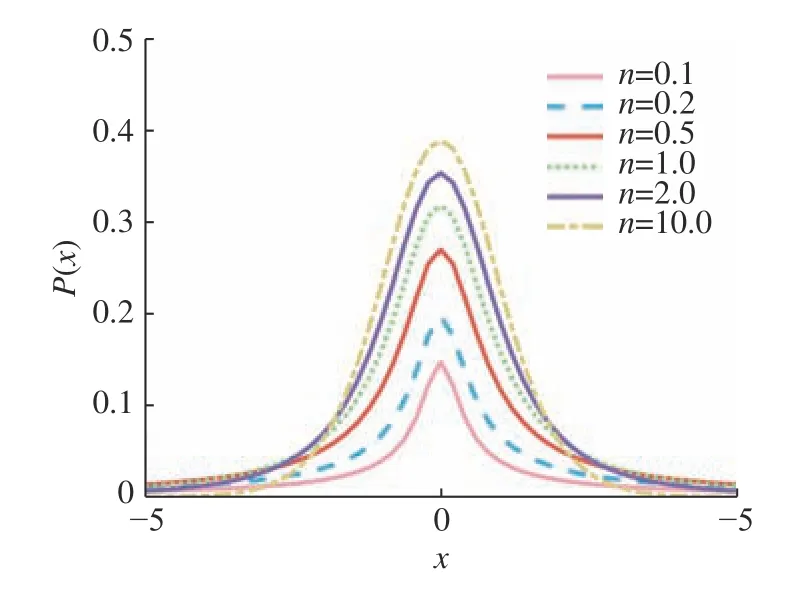
圖3 函數(shù)分布對比Fig.3 Function distribution comparison
由圖3可知,t分布的自由度n越小,曲線的雙尾翹越高,中間峰值越小,整體越平滑。反之,自由度n越大,中間峰值越大,整體越陡峭。自適應(yīng)t分布對鯨魚位置的更新為
式中:xti為更新后的鯨魚位置,n和t(n)分別為迭代次數(shù)和以迭代次數(shù)為自由度的t分布函數(shù)。
4) 蟻獅優(yōu)化算法。
在蟻獅優(yōu)化算法中,螞蟻通過隨機(jī)游走更新位置,公式為[18]
式中:cumsum為螞蟻游走位置累加和,T為最大迭代次數(shù),t為當(dāng)前迭代次數(shù),r(t)為0或1的隨機(jī)數(shù)。螞蟻隨機(jī)游走公式的標(biāo)準(zhǔn)化形式為
式中:ai和bi分別為第i個變量的最小值和最大值,和分別為第t代第i個變量的最小值和最大值。
2 混沌系統(tǒng)參數(shù)辨識的MIWOA
2.1 混沌系統(tǒng)的參數(shù)辨識原理
混沌系統(tǒng)參數(shù)辨識原理如圖4所示。
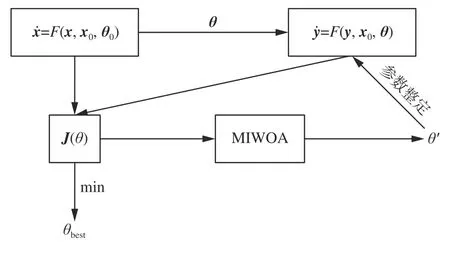
圖4 混沌系統(tǒng)參數(shù)辨識原理Fig.4 Principle of parameter identification for chaotic system
考慮如下n維混沌動力學(xué)系統(tǒng):
式中:x=[x1x2···xn]T∈Rn為系統(tǒng)的n維狀態(tài)變量,x0為初始狀態(tài)量,θ0=[θ10θ20···θm0]T為參數(shù)真實(shí)值。當(dāng)辨識系統(tǒng)參數(shù)時(shí),假設(shè)結(jié)構(gòu)為
式中:y=[y1y2···yn]T∈Rn為辨識系統(tǒng)的狀態(tài)變量,θ=[θ1θ2···θm]T為參數(shù)估計(jì)值。系統(tǒng)參數(shù)辨識是尋找一組最優(yōu)未知參數(shù),使系統(tǒng)真值x和估計(jì)值y的誤差值最小:
式中:xk和yk分別為k時(shí)刻的系統(tǒng)真值和估計(jì)值,m為參數(shù)辨識狀態(tài)變量序列的長度。目標(biāo)泛函J(θ)的值越小,參數(shù)辨識的精度越高。MIWOA流程如圖5所示。
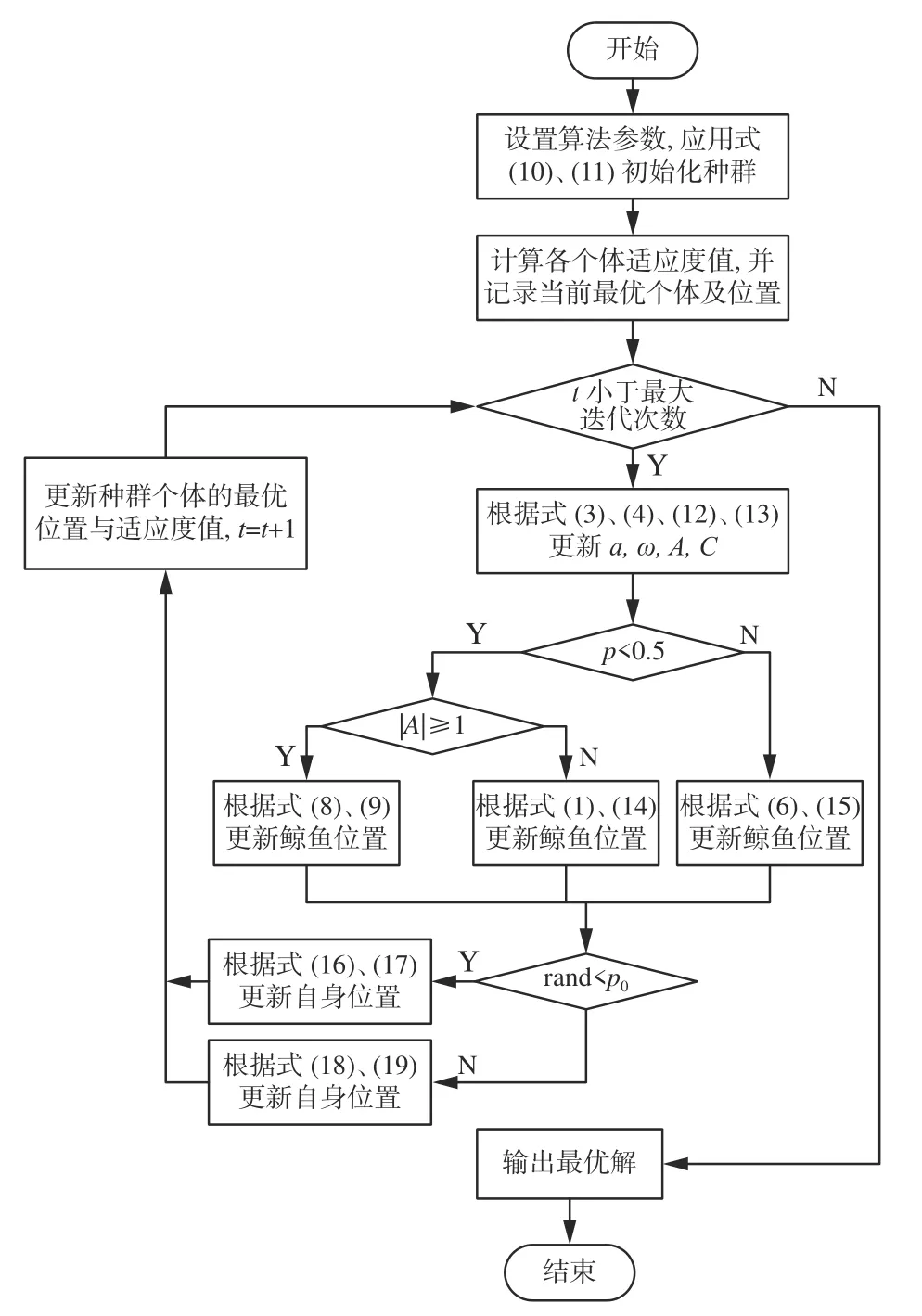
圖5 MIWOA流程Fig.5 Flow chart of MIWOA
2.2 MIWOA的時(shí)間復(fù)雜度分析
設(shè)種群規(guī)模為N,搜索空間維度為D,最大迭代次數(shù)為T,WOA的時(shí)間復(fù)雜度為O(NDT)。本文MIWOA以WOA為基礎(chǔ)進(jìn)行改進(jìn),Chebyshev混沌映射初始化種群的時(shí)間復(fù)雜度為O(ND),非線性收斂因子和自適應(yīng)權(quán)重未在基本W(wǎng)OA基礎(chǔ)上增加循環(huán)嵌套,時(shí)間復(fù)雜度為O(NDT),動態(tài)選擇自適應(yīng)t分布或蟻獅優(yōu)化算法的時(shí)間為t1,則其時(shí)間復(fù)雜度為O(NDT+t1),雖然MIWOA的時(shí)間復(fù)雜度相對WOA有所增加,但在可接受范圍內(nèi),下面通過數(shù)值試驗(yàn)說明MIWOA的卓越性。
3 MIWOA性能測試與分析
3.1 測試函數(shù)的選取
仿真試驗(yàn)基于AMD Ryzen R7 5700U CPU@1.80 GHz,在Matlab R2019a 環(huán)境下運(yùn)行。為了驗(yàn)證MIWOA有更好的尋優(yōu)性能,選取表1的10個基準(zhǔn)函數(shù)進(jìn)行測試,ε表示絕對誤差精度。f1~f7為單峰函數(shù),f8~f10為多峰函數(shù),10個測試函數(shù)的最優(yōu)值均為0。

表1 基準(zhǔn)函數(shù)Table 1 Benchmark functions
3.2 MIWOA與其他智能算法對比
采用10個基準(zhǔn)函數(shù)檢驗(yàn)MIWOA的性能,與WOA、粒子群算法(particleswarmoptimization,PSO)[21]、人工蜂群算法(artificialbee colonyalgorithm,ABC)[22]、灰狼算法(greywolf optimizer,GWO)[23]和哈里斯鷹算法(harris hawksoptimization,HHO)[24]進(jìn)行測試結(jié)果比較。令N=30,D=30,T=1000,運(yùn)行30次,表2為6種算法的最優(yōu)值、最差值、平均值和標(biāo)準(zhǔn)差(黑色粗體為最優(yōu)結(jié)果)。
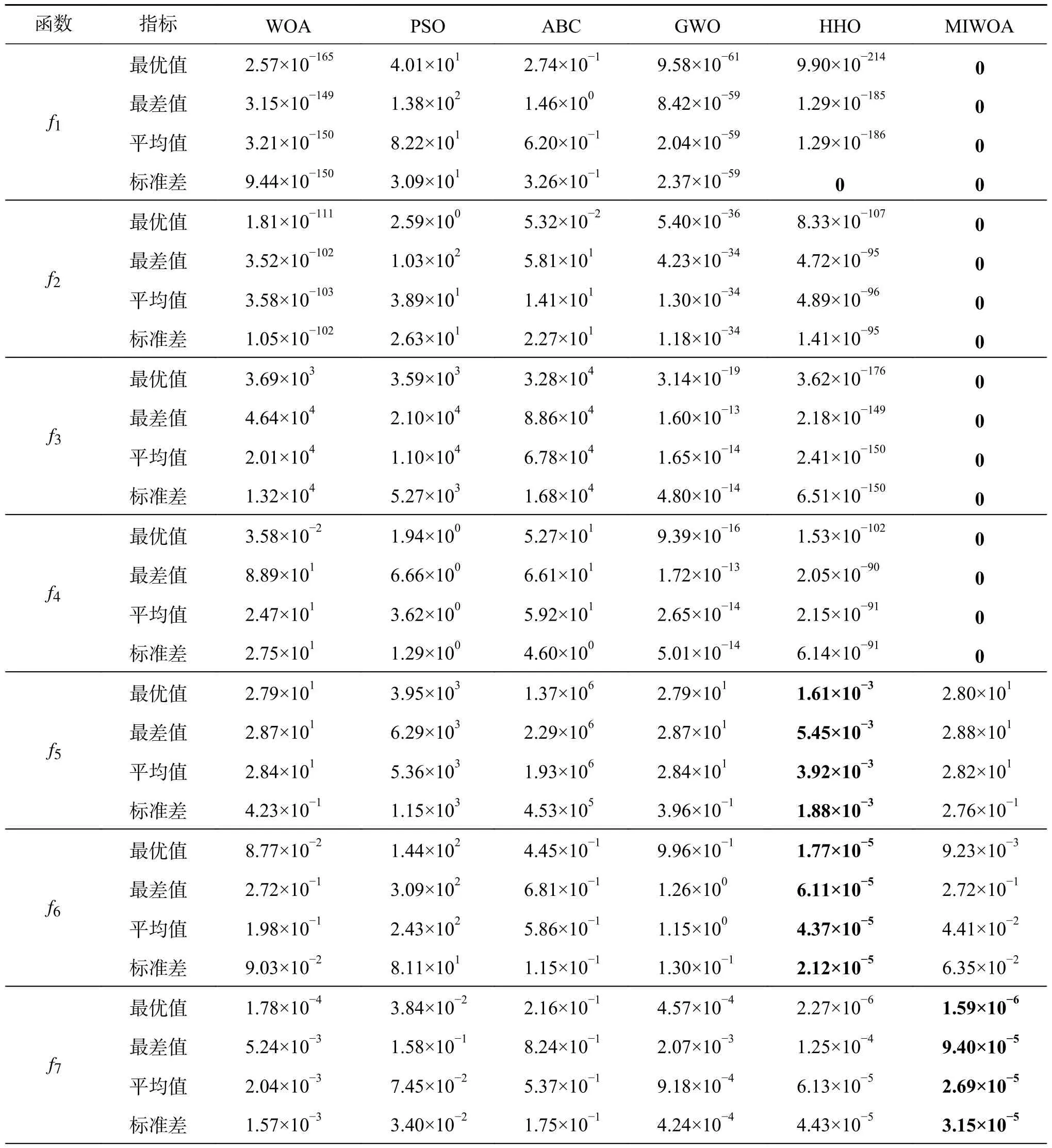
表2 測試函數(shù)優(yōu)化結(jié)果Table 2 Test function optimization results
由表2數(shù)據(jù)可知,對于單峰函數(shù)f1、f2,MIWOA的尋優(yōu)結(jié)果均為0, WOA的計(jì)算結(jié)果優(yōu)于PSO、ABC和GWO算法。在f3、f4測試函數(shù)上,MIWOA的計(jì)算結(jié)果優(yōu)于HHO,可取得理論最小值。對于f5~f7函數(shù),雖然MIWOA沒有達(dá)到最小值,但優(yōu)于WOA。對于多峰函數(shù)f8~f10,MIWOA可收斂到最優(yōu)值附近,其中f9函數(shù)可收斂到最優(yōu)值,說明MIWOA相對于其他算法有更好的收斂精度和穩(wěn)定性。
基準(zhǔn)測試函數(shù)的收斂曲線可以清晰地展現(xiàn)算法的收斂速度,圖6(a)~(d)和(e)~(f)分別為單峰和多峰函數(shù)的平均收斂曲線。由圖6可以看出,對于6個測試函數(shù),在收斂精度相同的情況下,MIWOA收斂速度更快,說明Chebyshev混沌映射初始化種群策略提高了種群中高質(zhì)量個體的比例,非線性收斂因子和自適應(yīng)權(quán)重平衡了全局和局部搜索,加速收斂。MIWOA收斂曲線波動下降,說明自適應(yīng)t分布或蟻獅優(yōu)化算法的動態(tài)選擇策略有助于算法跳出局部最優(yōu),提高收斂精度。
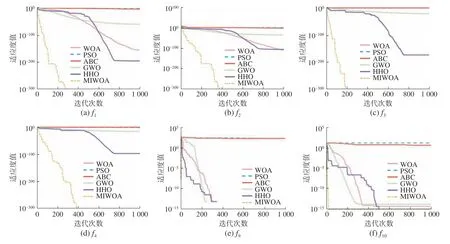
圖6 30維測試函數(shù)的平均收斂曲線Fig.6 Average convergence curves of 30 dimensional test functions
3.3 Wilcoxon秩和檢驗(yàn)
Wilcoxon秩和檢驗(yàn)?zāi)軌驒z測更為復(fù)雜的數(shù)據(jù)分布,并與算法多次運(yùn)行的數(shù)據(jù)對比,公平地體現(xiàn)MIWOA的優(yōu)越性[24]。實(shí)驗(yàn)設(shè)定顯著性差異為5% ,當(dāng)p<5%判定兩算法有明顯差異,反之無明顯差異。符號“+”“-”和“=”分別表示MIWOA的性能優(yōu)于、劣于和相當(dāng)于對比算法,N/A表示無法進(jìn)行顯著性判斷。選取MIWOA在10個測試函數(shù)的運(yùn)行結(jié)果與WOA、PSO、ABC、GWO以及HHO運(yùn)行結(jié)果進(jìn)行Wilcoxon秩和檢驗(yàn),計(jì)算p值。表3結(jié)果顯示大部分p<5%,說明MIWOA的尋優(yōu)能力優(yōu)于5種對比算法。
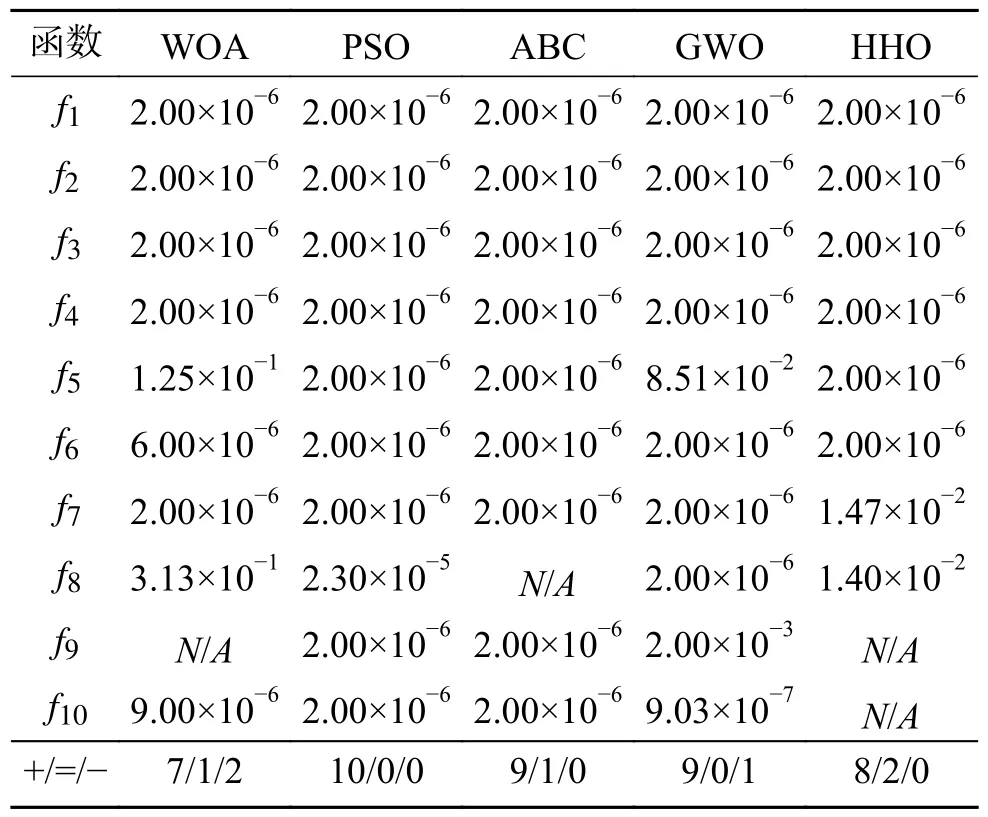
表3 Wilcoxon秩和檢驗(yàn)結(jié)果Table 3 Results of Wilcoxon rank sum test
3.4 MIWOA不同改進(jìn)策略的有效性分析
為比較3種改進(jìn)策略對MIWOA性能的影響,令N=30,D=30,T=500,對f1~f10進(jìn)行尋優(yōu)計(jì)算,將MIWOA與WOA、WOA1(采用Chebyshev混沌映射)、WOA2(采用非線性收斂因子和自適應(yīng)權(quán)重)和WOA3(采用自適應(yīng)t分布或蟻獅優(yōu)化算法)比較,計(jì)算結(jié)果如表4。

表4 不同改進(jìn)策略算法性能對比Table 4 Performance comparison of algorithms for different improved strategies
由表4可知,3種改進(jìn)策略對WOA均有不同程度的提升,WOA3的改進(jìn)效果最好,WOA2次之,WOA1的計(jì)算結(jié)果低于其他2種算法的計(jì)算結(jié)果,但對WOA仍有明顯的改進(jìn)效果。將3種改進(jìn)策略相結(jié)合時(shí),算法搜索最精確,明顯優(yōu)于WOA1、WOA2和WOA3,表明3種改進(jìn)策略是有效的。
3.5 MIWOA與不同策略改進(jìn)WOA對比
為了對比MIWOA與其他改進(jìn)WOA的改進(jìn)效果,令N=30,D=500,T=500,引用3種算法(OBCWOA[12]、eWOA[14]和MEWOA[15])的數(shù)據(jù),在相同測試條件下,對f1~f10測試,結(jié)果如表5。
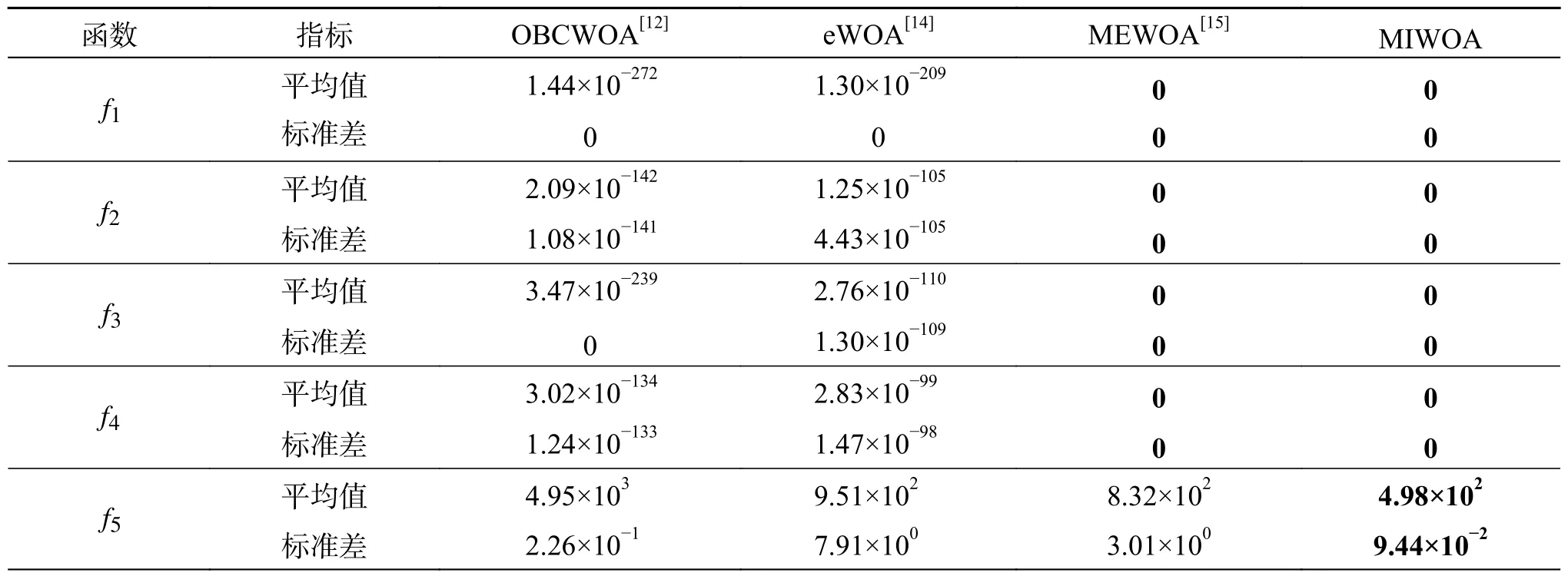
表5 MIWOA與其他改進(jìn)WOA性能對比Table 5 Performance comparison between MIWOA and other improved WOAs
表5結(jié)果顯示,對于函數(shù)f1~f4,MIWOA與MEWOA可以在有限次迭代收斂到最優(yōu)值,而OBCWOA和eWOA相對收斂精度較低。對于函數(shù)f5~f10,MIWOA可以使用更少的迭代次數(shù)收斂到最優(yōu)值,說明MIWOA比其他改進(jìn)WOA尋優(yōu)效果更好。
平均絕對誤差(meanabsoluteerror, MAE)是評價(jià)算法有效可行的重要指標(biāo),計(jì)算公式為[23]
式中:mi為算法求解結(jié)果平均值,oi為各測試函數(shù)理論值,Nf為測試函數(shù)個數(shù)。表6為除理論值非零的f8函數(shù)外,4種算法的MAE排序,由計(jì)算結(jié)果可知,MIWOA的MAE值最小,排名第1,證明了本文改進(jìn)策略的有效性。
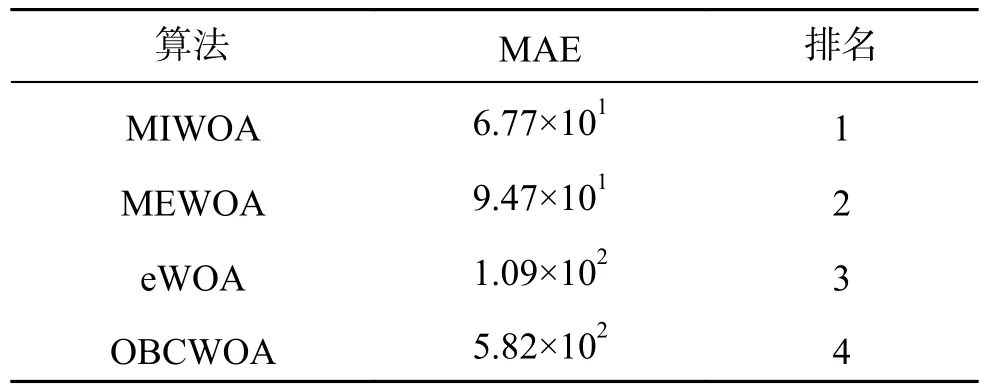
表6 4種改進(jìn)WOA的MAE排名Table 6 MAE ranking of four improved WOAs
3.6 MIWOA求解高維函數(shù)的實(shí)驗(yàn)分析
由上述計(jì)算結(jié)果可知,對于低維測試函數(shù),本文MIWOA尋優(yōu)效果良好,但實(shí)際應(yīng)用中高維大規(guī)模問題普遍存在,為了檢驗(yàn)MIWOA求解高維問題的可行性,將其在10個基準(zhǔn)函數(shù),N=30,T=500,D=200、500、1000情況下,運(yùn)行30次取平均值,根據(jù)文獻(xiàn)[25]求解算法尋優(yōu)成功率。絕對誤差精度如表1所示,計(jì)算結(jié)果如表7。

表7 高維測試函數(shù)優(yōu)化對比Table 7 High dimensional test functions optimization comparison
從表7可以看出,兩算法在求解高維測試函數(shù)時(shí),尋優(yōu)精度比求低維函數(shù)略有下降,但整體仍可達(dá)到較高精度,獲得理想結(jié)果。MIWOA在7個基準(zhǔn)函數(shù)上尋優(yōu)成功率達(dá)到了100%,相同維度下,MIWOA的尋優(yōu)效果比WOA更好,說明MIWOA對于求解高維優(yōu)化問題具有較高的計(jì)算精度和穩(wěn)定性。
3.7 MIWOA平均運(yùn)行時(shí)間分析
為了驗(yàn)證MIWOA的計(jì)算速度,將其與PSO、ABC、GWO、HHO、WOA、WOA1、WOA2、WOA3運(yùn)行30次的平均時(shí)間對比,N=30,D=1000,T=500,計(jì)算結(jié)果如表8。
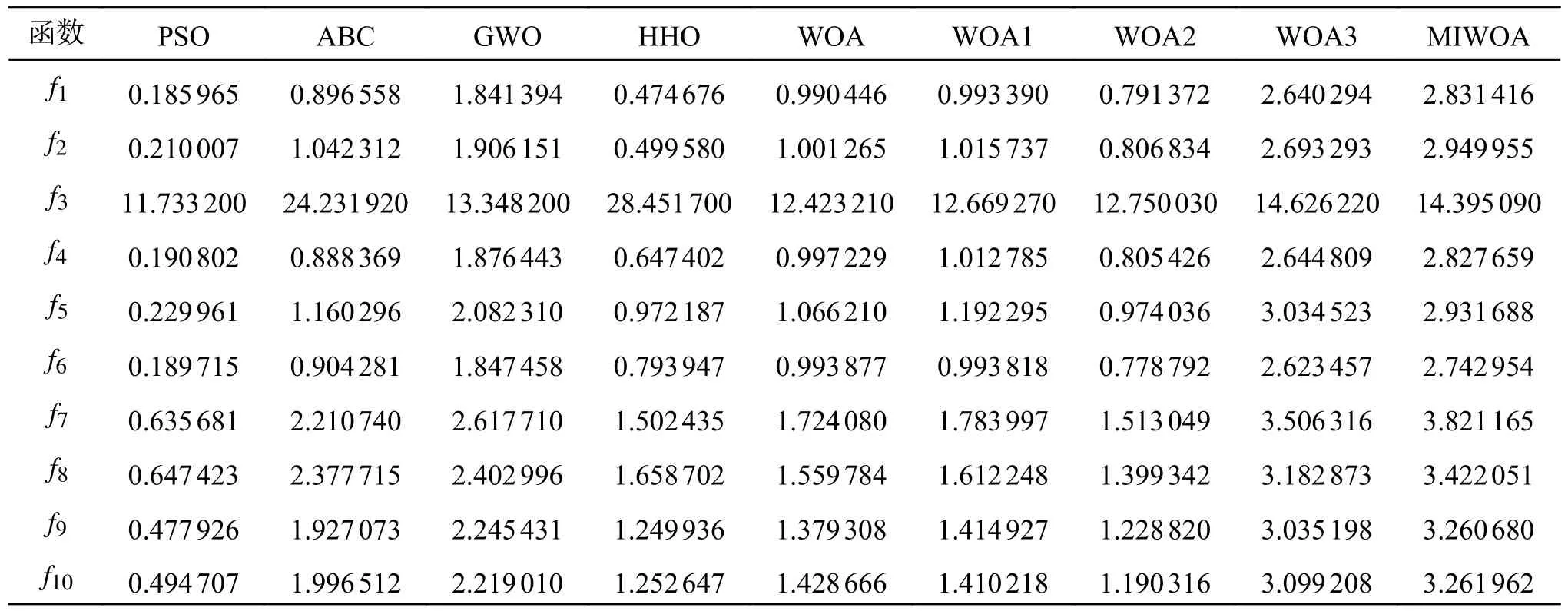
表8 基準(zhǔn)函數(shù)尋優(yōu)平均時(shí)間對比Table 8 Comparison of average time for optimization of benchmark functions
由表8可知,對于元啟發(fā)式算法,WOA與ABC、HHO運(yùn)行時(shí)間相近,可以快速收斂到最優(yōu)值。對于改進(jìn)算法,WOA、WOA1和WOA2的平均時(shí)長相當(dāng),說明WOA1和WOA2的改進(jìn)策略未增加WOA運(yùn)行時(shí)間。由于算法后期動態(tài)選擇自適應(yīng)t分布或蟻獅優(yōu)化算法,增加了循環(huán)嵌套,WOA3耗時(shí)多于WOA。融合多種改進(jìn)策略的MIWOA搜索范圍變廣,尋優(yōu)時(shí)間增加,但均在合理范圍內(nèi),與理論分析相符。
4 MIWOA辨識混沌系統(tǒng)參數(shù)
4.1 MIWOA對Ro¨ssler 混沌系統(tǒng)的參數(shù)辨識
Ro¨ssler 系統(tǒng)具有簡單、非對稱吸引子結(jié)構(gòu),在保密通信中承擔(dān)非常重要的作用。以典型Ro¨ssler混沌系統(tǒng)為例,驗(yàn)證MIWOA可以精確辨識混沌系統(tǒng)參數(shù)。Ro¨ssler系統(tǒng)表達(dá)式為[7]
當(dāng)參數(shù)a=0.2,b=0.2,c=5.7時(shí),系統(tǒng)為混沌狀態(tài),其演化過程如圖7所示。令初值向量為[-101]T,步長h=0.01,使用四階Runge-Kutta法解式(21),利用前100個解及PSO、WOA、MIWOA辨識待定參數(shù)[abc]T,各算法獨(dú)立運(yùn)行20次。

圖7 Ro¨ssler 混沌系統(tǒng)動力學(xué)軌跡Fig.7 Dynamic track of Ro¨ssler chaotic system
首先測試3種算法在具有一個未知參數(shù)的Ro¨ssler系統(tǒng)參數(shù)辨識中的搜索性能,即每次只辨識a、b、c3個參數(shù)中的一個,測試結(jié)果如表9。由表中數(shù)據(jù)可知,對于參數(shù)a,MIWOA可收斂到理論最優(yōu)值,其最差值優(yōu)于其他2種算法的最優(yōu)值。對于參數(shù)b,WOA和MIWOA均可達(dá)到理論最優(yōu)值,但MIWOA尋優(yōu)效果更好。對于參數(shù)c,MIWOA的適應(yīng)度值小于PSO和WOA的適應(yīng)度值,估計(jì)值很接近真實(shí)值,說明MIWOA具有良好的全局搜索能力和計(jì)算魯棒性。
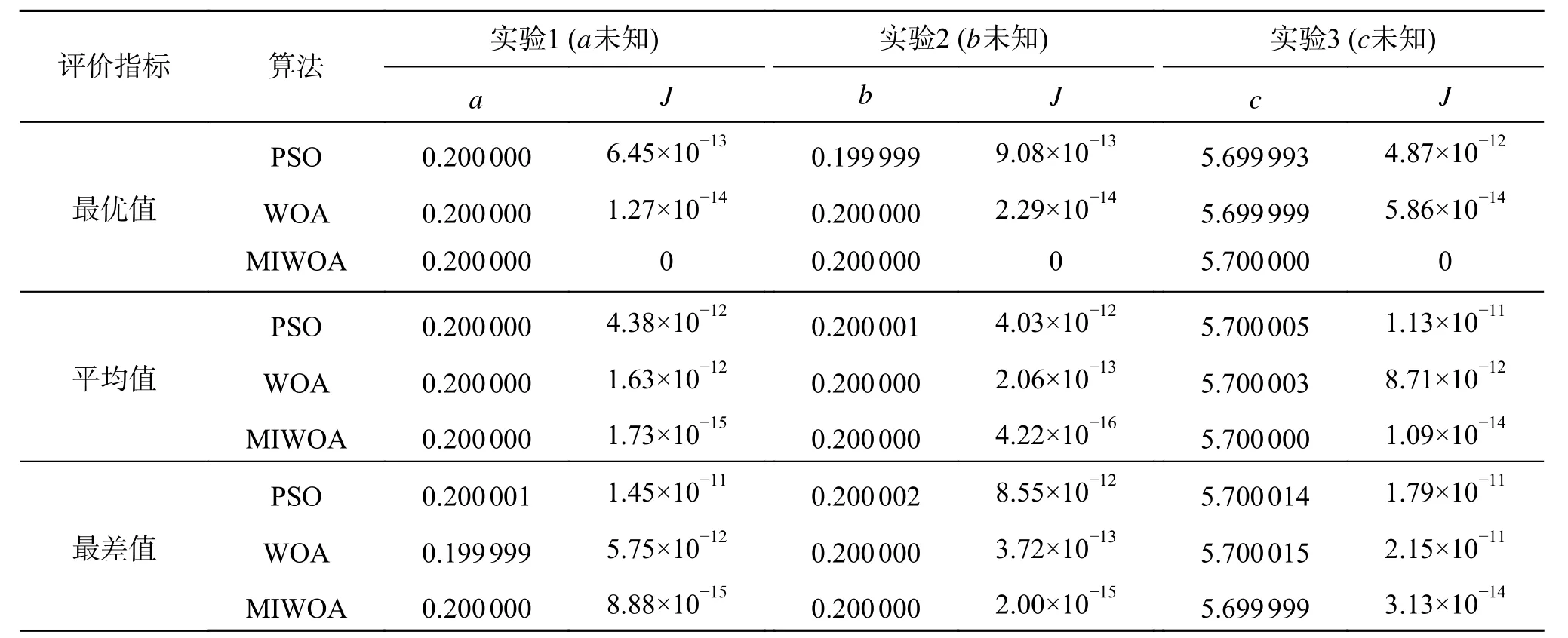
表9 不同算法的一維參數(shù)估計(jì)結(jié)果比較Table 9 Comparison of one-dimensional parameter estimation results for different algorithms
然后測試各算法在具有2個未知參數(shù)的混沌系統(tǒng)參數(shù)辨識中的搜索性能,計(jì)算結(jié)果如表10。從表10估計(jì)a和b可以看出,各算法搜索精度相似,相對于一個未知參數(shù)的情況,搜索精度略有下降,但MIWOA的計(jì)算結(jié)果仍優(yōu)于PSO和WOA。另外2種情況也得出同樣的結(jié)論,驗(yàn)證了MIWOA辨識2個未知參數(shù)Ro¨ssler系統(tǒng)的可行性。
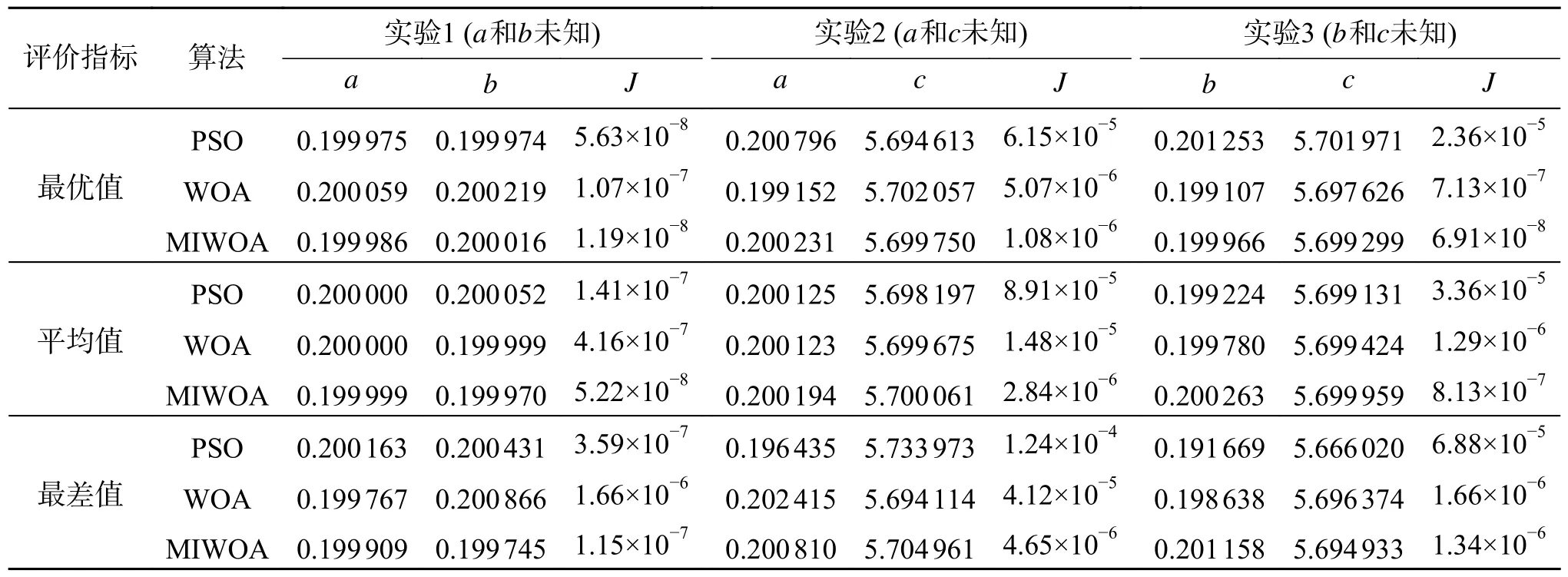
表10 不同算法的二維參數(shù)估計(jì)結(jié)果比較Table 10 Comparison of two-dimensional parameter estimation results for different algorithms
最后,使用3種算法辨識具有3個未知參數(shù)的混沌系統(tǒng),表11為各算法運(yùn)行20次的統(tǒng)計(jì)結(jié)果。由表11中數(shù)據(jù)可知,各算法的搜索精度下降,但MIWOA的最差值優(yōu)于PSO和WOA的最優(yōu)值,在3種算法中搜索精度最高,表明MIWOA對Ro¨ssler混沌系統(tǒng)參數(shù)辨識更具有效性。

表11 不同算法的三維參數(shù)估計(jì)結(jié)果比較Table 11 Comparison of three-dimensional parameter estimation results for different algorithms
圖8和圖9分別是WOA和MIWOA對Ro¨ssler混沌系統(tǒng)的參數(shù)辨識曲線和適應(yīng)度值曲線,從圖中可以看到MIWOA的參數(shù)估計(jì)值可以快速收斂到真實(shí)值,適應(yīng)度值迅速逼近0,表明MIWOA高效的全局搜索能力和快速收斂速度。
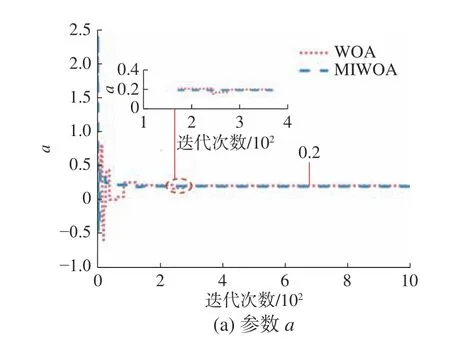
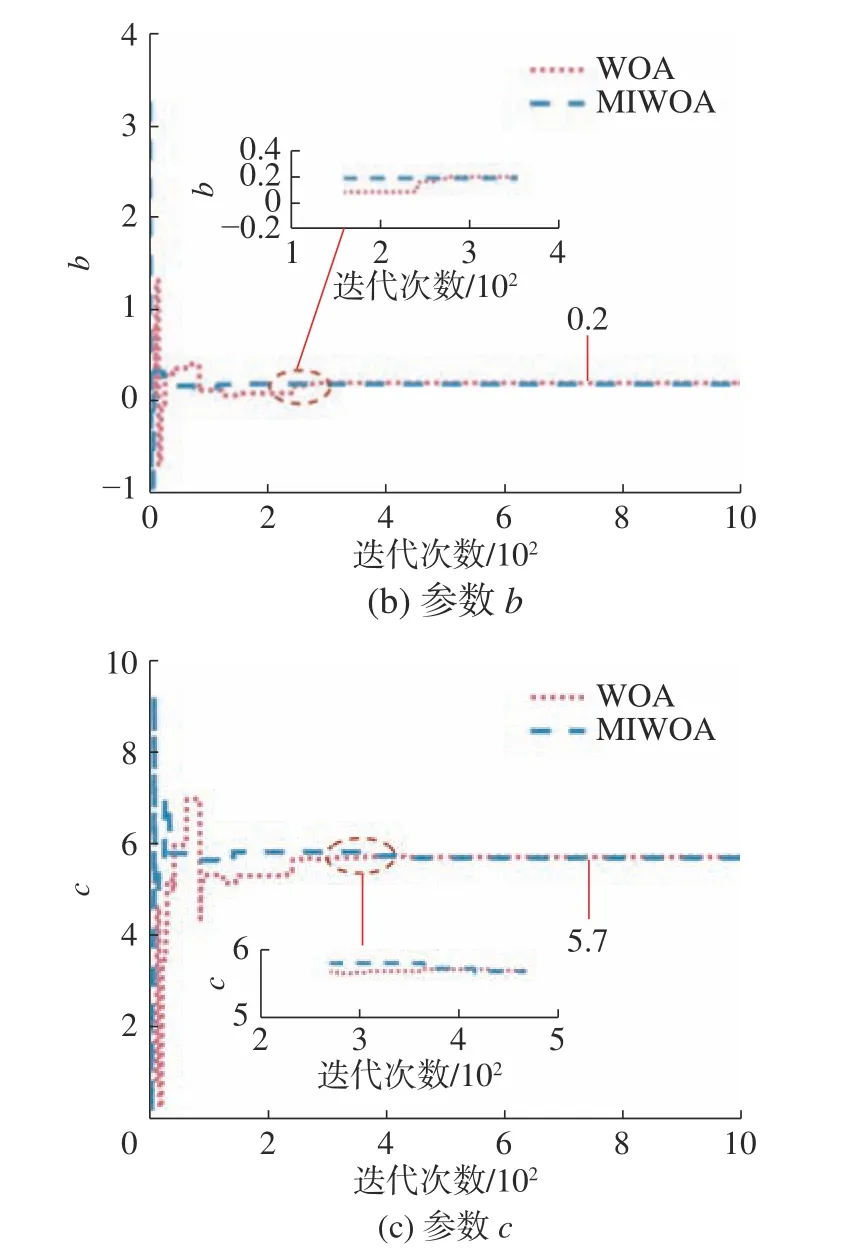
圖8 WOA和MIWOA參數(shù)辨識曲線Fig.8 Parameter identification curves of WOA and MIWOA
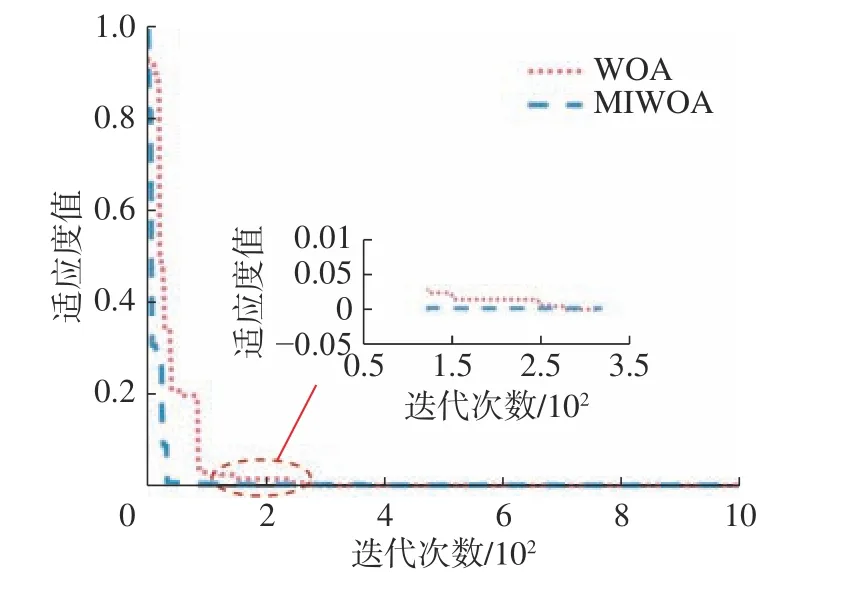
圖9 WOA和MIWOA適應(yīng)度值曲線Fig.9 Fitness value curves of WOA and MIWOA
4.2 MIWOA對Lu¨ 混沌系統(tǒng)的參數(shù)辨識
為了驗(yàn)證MIWOA對混沌系統(tǒng)參數(shù)辨識的普適性,以Lu¨系統(tǒng)為例進(jìn)行仿真,表達(dá)式為[26]
其中,系統(tǒng)參數(shù)真實(shí)值為a=30,b=22.2,c=8.8/3時(shí),系統(tǒng)為混沌狀態(tài),其演化過程如圖10所示。
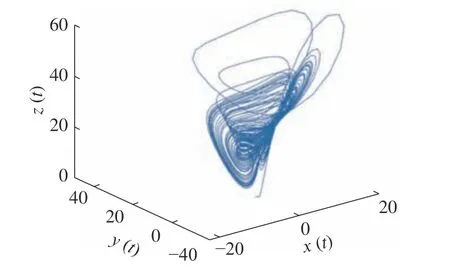
圖10 Lu¨混沌系統(tǒng)動力學(xué)軌跡Fig.10 Dynamic track of Lu¨ chaotic system
令初值向量為[-101]T,使用PSO、WOA和MIWOA辨識Lu¨混沌系統(tǒng)3個參數(shù)未知時(shí)的情況,3種算法獨(dú)立運(yùn)行20次,辨識結(jié)果如表12所示。
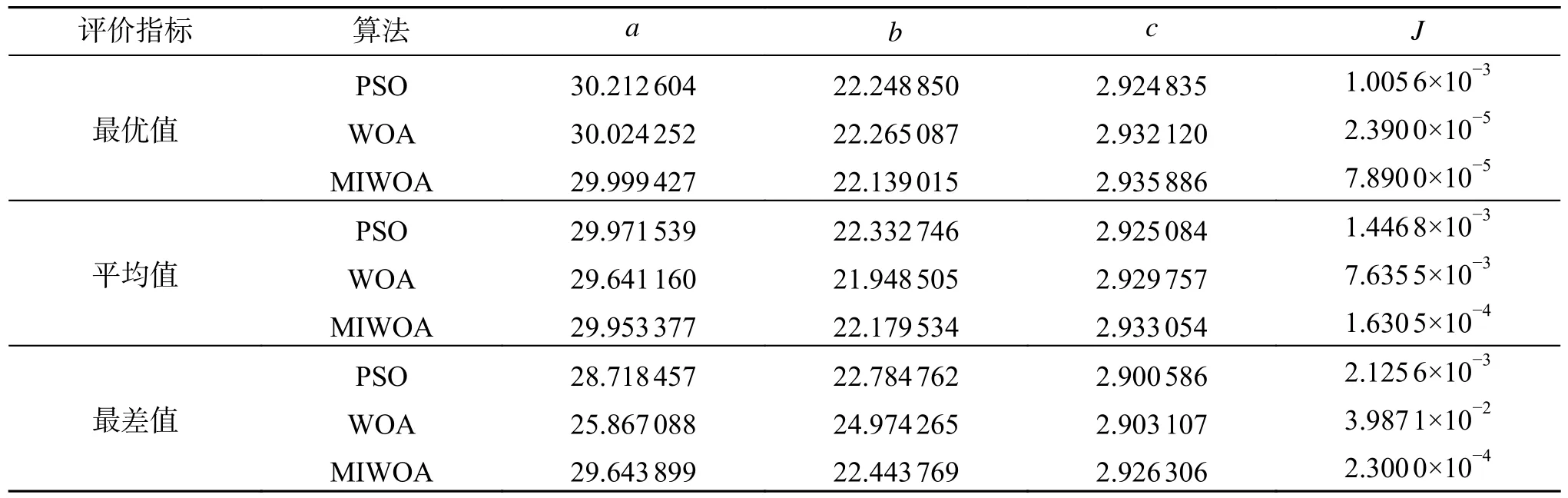
表12 各算法的三維參數(shù)估計(jì)結(jié)果比較Table 12 Comparison of three-dimensional parameter estimation results for each algorithm
由表12中數(shù)據(jù)可知,除了MIWOA的最優(yōu)適應(yīng)度值大于WOA的最優(yōu)適應(yīng)度值,MIWOA的計(jì)算結(jié)果均優(yōu)于其他2種算法,說明MIWOA辨識混沌系統(tǒng)具有普適性。
5 結(jié)束語
本文以WOA為基礎(chǔ),提出一種MIWOA。通過分析初始種群分布,使用Chebyshev混沌映射提高了初始種群質(zhì)量。采用非線性收斂因子和自適應(yīng)權(quán)重,提高了算法全局和局部搜索能力。動態(tài)選擇自適應(yīng)t分布或蟻獅優(yōu)化算法更新鯨魚位置,避免過早收斂。通過對10個基準(zhǔn)函數(shù)和高維測試函數(shù)進(jìn)行測試,以及Wilcoxon秩和檢驗(yàn),證明了MIWOA的優(yōu)越性。
將MIWOA應(yīng)用于Ro¨ssler和Lu¨ 混沌系統(tǒng)的參數(shù)辨識,仿真結(jié)果優(yōu)于PSO和WOA,驗(yàn)證了MIWOA辨識混沌系統(tǒng)參數(shù)的高效性。今后將繼續(xù)研究WOA的優(yōu)化策略,將其應(yīng)用到混沌系統(tǒng)控制與同步等其他領(lǐng)域。
致謝本文作者衷心感謝德國阿爾弗雷德韋格納研究所 Sergey Danilov 教授和王強(qiáng)博士在寫作過程中提出的寶貴建議和意見!
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34