多執行器載荷差異儲能均衡系統特性
2024-04-25 10:58:34馮克溫王永進郝云曉
液壓與氣動 2024年4期
關鍵詞:系統
梁 濤,權 龍,馮克溫,王永進,郝云曉
(太原理工大學 新型傳感器與智能控制教育部與山西省重點試驗室,山西 太原 030024)
引言
液壓控制系統是液壓挖掘機、裝載機和叉車等工程機械最常見的驅動系統[1]。市場上典型的液壓系統包括正流量系統[2]和負流量系統[3]等,普遍存在能量效率低的缺點,導致工程機械平均效率只有22%。隨著全球能源危機和環境污染日益嚴重,亟需降低系統能量消耗和廢氣排放。
一種方法是通過降低節流損失來提升液壓系統能效。負載敏感系統通過壓力反饋使泵壓力和最高負載壓力匹配,控制液壓泵提供執行器所需的流量,但存在動態響應慢、易振蕩的問題[4]。在此基礎上提出的電液流量匹配系統,根據執行器所需流量同時控制液壓泵和多路閥,雖然提升了系統動態響應,但需解決泵閥之間的流量不匹配問題[5]。上述系統所采用的多路閥進出油口節流邊機械耦合,閥口仍存在大量節流損失,尤其在超越負載工況更為嚴重。相關學者提出進出口獨立控制系統,通過將進出口節流邊解耦,來進一步降低液壓系統節流損失[6]。近年來,進出口獨立控制系統在工程機械的應用已經成為了研究熱點[7-8],節能效果顯著。
能量回收是另一種有效提升液壓系統能效的方法,可以通過液壓或電氣儲能元件實現。在電氣能量回收方案中,一般通過液壓馬達-發電機將執行機構動勢能轉化為電能儲存在超級電容或蓄電池中[9]。龔俊等[10-11]提出了獨立于挖掘機原有系統的能量回收系統,通過再生馬達和發電機回收動臂和回轉機構的動勢能。液壓回收方案普遍采用液壓蓄能器作為能量回收單元。由于液壓蓄能器壓力隨著油液的體積而變化,為了避免蓄能器非線性對執行器運動性能造成影響。RANJAN P[12]在蓄能器出口增加比例閥,雖然改善了動臂控制特性,但是也增加了節流損失。夏連鵬等[13]提出采用三腔液壓缸驅動動臂的方案,大幅縮短了能量傳遞鏈,能量回收效率達70.9%。
現有技術方案對于單執行器系統的節能方法已經被研究充分。然而,在多執行器系統中,由于動力源壓力由最高負載壓力決定,其他執行器回路必須通過節流形式負載壓力與系統壓力相匹配,額外產生了載荷差異造成的節流損失。迄今為止,只有少量的研究報道討論降低載荷節流損失[14-15]。
為此,本研究提出了多執行器載荷差異儲能均衡原理,集成了消除載荷差異節流損失和回收執行機構能量的優點。并且通過出油腔壓力調控,使各執行器的多路閥壓差保持相等,確保了多執行器系統的控制性能。以37 t液壓挖掘機為研究對象,分別研究了所提系統的運行特性和能效特性。
1 工作原理
圖1為多執行器載荷差異儲能均衡系統原理圖。主電機驅動電控變量泵輸出執行器所需流量,通過多路閥分配流量,進而控制液壓缸的運行速度和位移。并且為了消除載荷差異造成的節流損失,回收執行器能量,設計了電液儲能單元,主要由液壓泵/馬達、電動/發電機、液壓蓄能器、雙向DC/DC變換器和超級電容器組成。
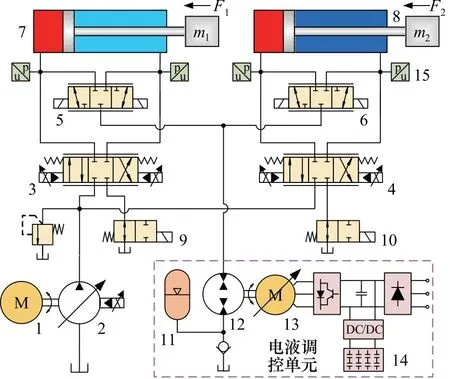
1.主電機 2.電控變量泵 3、4.多路閥 5、6.比例閥 7、8.液壓缸 9、10.開關閥 11.蓄能器 12.液壓泵/馬達 13.電動/發電機 14.超級電容 15.壓力傳感器
當兩個液壓缸復合動作,重載液壓缸回路的比例閥關閉,開關閥打開,通過多路閥控制液壓缸的速度和位移。輕載液壓缸回路的開關閥關閉,通過比例閥控制電液儲能單元位于輕載執行器的回油路。此時,通過控制電動/發電機的扭矩,可調控輕載液壓缸的出油腔腔壓力升高,使兩個液壓缸的進油腔壓力相等,從而消除載荷差異引起的節流損失。原本由于載荷差異造成的能量損失,通過電液儲能單元轉換為電能和液壓能儲存。此時,各多路閥的進出油口壓差相等,意味著本系統自然具有傳統壓力補償器的壓力補償功能。
當執行器處于超越負載工況,電液儲能單元與執行器出油口連接,從而平衡外負載。執行器動勢能通過電液儲能單元進行回收,而不是因節流作用完全浪費。同時在泵/馬達出口安裝了液壓蓄能器,來降低電動/發電機的裝機功率。
2 能效分析
為明確載荷差異儲能均衡系統的能效特性,本研究選擇典型的電液流量匹配系統進行對比分析。
2.1 電液流量匹配系統
圖2為電液流量匹配系統簡圖,包括動力源、閥前壓力補償器和多路閥。壓力補償器通過控制各多路閥壓差保持不變,進而消除負載壓力對流量的影響。假設液壓缸1為重載執行器,液壓缸2為輕載執行器。
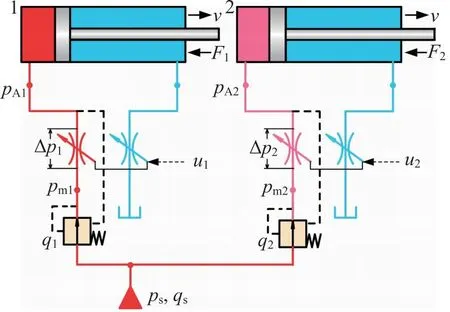
圖2 電液流量匹配系統簡圖
根據流量匹配控制方式,多路閥通過流量僅由開口面積決定,多路閥通過流量為:
(1)
式中,qi——多路閥i進油路通過的流量,其中,i=1,2
ui——多路閥i輸入信號
A(ui)——多路閥i進油路的閥口面積
Cd——流量系數
ρ——油液密度
Δpi——多路閥i進油路的閥口壓差
pd——壓力補償器預設壓力
此時重載執行器的補償器1全開,則輕載執行器的補償器2需減小開口,用以保持兩個多路閥壓差等于補償器設定壓力。兩個壓力補償器的壓力損失分別為:
Δpr1=pr
(2)
Δpr2=pr+(pA1-pA2)
(3)
式中,Δpr1,Δpr2——壓力補償器1,2壓損
pr——壓力補償器全開時壓損
pA1,pA2——液壓缸1,2無桿腔壓力
忽略在液壓管路造成的壓力損失,液壓系統輸出壓力為:
ps=pA1+pd+Δpr1=pA1+pd+Δpr
(4)
假設液壓缸有桿腔壓力pB=0,則系統的節流損失為:
Ploss=q1pd+q1pr+q2pd+q2pr+q2(pA1-pA2)
(5)
忽略在液壓管路造成的壓力損失,電液流量匹配系統輸出功率為:
Ps=pA1q1+pA2q2+Ploss=pA1q1+pA2q2+
q1pd+q1pr+q2pd+q2pr+q2(pA1-pA2)
(6)
從式(5)和式(6)可以看出,出現了由各液壓缸進油腔壓力差造成的能耗添加項q2(pA1-pA2),且隨著執行器載荷差異的增加,這部分能耗會進一步增大,嚴重降低了系統能效。
2.2 載荷差異儲能均衡系統
當保持和圖2所示電液流量匹配系統相同的液壓缸尺寸和運行工況,可以將多執行器載載荷差異儲能均衡系統簡化為如圖3所示。
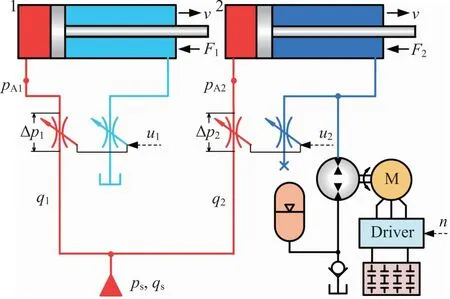
圖3 多執行器載荷差異儲能均衡系統簡圖
相比電液流量匹配系統,新提出的系統去掉了閥前壓力補償器,并通過電液儲能單元對輕載執行器出油腔壓力進行調控,進而使各進油腔壓力相等。多路閥的進油口壓差為:
Δp1=Δp2=pd
(7)
液壓系統輸出壓力為:
ps=pA1+Δp1=pA2+Δp2=pA1+pd
(8)
由于輕載液壓缸2負載力,不受出油腔壓力調控影響,因此可以得到液壓缸2調控后的有桿腔壓力為:
pB2=(pA1-pA2)α
(9)
α=AA/AB
(10)
式中,α——液壓缸兩腔有效面積比
AA——液壓缸無桿腔有效面積
AB——液壓缸有桿腔有效面積
通過電液儲能單元可回收的液壓功率為:
Pre=pB2q2/α=(pA1-pA2)q2
(11)
此時液壓系統的節流損失為:
Ploss=q1Δp1+q2Δp2=(q1+q2)pd
(12)
載荷差異儲能均衡系統的輸出功率為:
Ps=pA1q1+pA2q2+Ploss
=pA1q1+pA2q2+(q1+q2)pd
(13)
通過上述分析,可以得到電液流量匹配系統和多執行器載荷差異儲能均衡系統的功率分配特性,如圖4所示。通過電液儲能單元對輕載執行器出油腔壓力進行調控,使各執行器進油腔壓力相等。可以看出,相比電液流量匹配系統,本研究所提出的載荷差異儲能均衡系統系統,有效消除了載荷差異造成的節流損失和壓力補償器造成的節流損失。并通過電液儲能單元將原來由載荷差異造成的能量損失進行了回收。
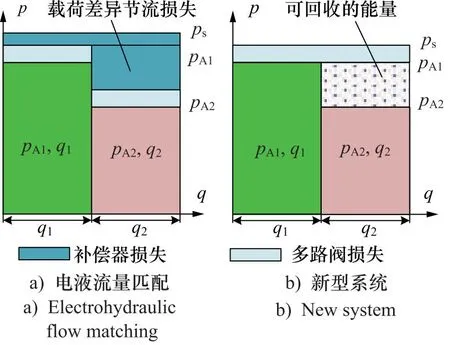
圖4 系統能耗對比
3 仿真模型構建
本研究選用工程機械中最為典型的液壓挖掘機作為應用對象,通過動臂和鏟斗復合動作,對所提出的多執行器載荷差異儲能均衡系統的運行特性和能效特性進行研究。
對實驗室某37 t液壓挖掘機機械結構進行測繪,并結合液壓控制系統中主要元件的主要參數,利用多學科聯合仿真軟件SimulationX,構建出載荷差異儲能均衡液壓挖掘機的聯合仿真模型如圖5所示。

圖5 載荷差異儲能均衡液壓挖掘機仿真模型
如圖5所示,載荷差異儲能均衡液壓挖掘機聯合仿真模型包括液壓系統、電氣系統和機械系統3部分。該模型充分考慮了各液壓元件的效率,以及各執行機構的連接副和質心位置。在仿真過程中,能夠真實反映37 t液壓挖掘機運行過程中的慣性質量和負載力。仿真模型主要參數如表1所示。
表1 仿真模型主要參數
4 動臂/鏟斗復合運行特性
為充分分析本研究所提系統在多執行器復合動作時的運行特性和能效特性,本研究選用工程機械典型的電液流量匹配系統作為對比對象。在空載工況下,控制液壓挖掘機的動臂和鏟斗復合動作,動作軌跡如圖6所示,可分為R1和R2兩個階段。在R1階段,同時控制動臂液壓缸伸出和鏟斗液壓缸縮回,模擬液壓挖掘機卸載動作;在R2階段,同時控制動臂液壓缸縮回和鏟斗液壓缸伸出,使動臂和鏟斗返回原來位置。

圖6 動臂/鏟斗復合動作軌跡
4.1 電液流量匹配系統
電液流量匹配系統的運行特性如圖7所示。圖7a為動臂液壓缸和鏟斗液壓缸的速度和負載力,圖7b為動臂液壓缸和鏟斗液壓缸的兩腔壓力和位移。
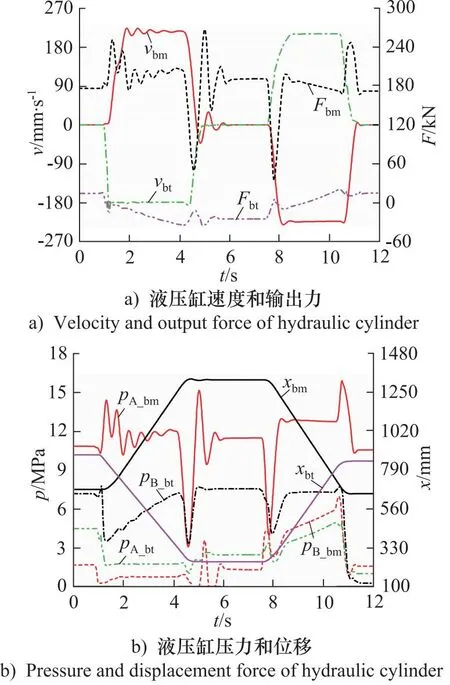
圖7 電液流量匹配系統運行特性
定義液壓缸輸出力為:
FL=pAAA-pBAB
(14)
可以看出在1~5.1 s的R1階段,動臂和鏟斗液壓缸同時動作完成卸載動作時,動臂液壓缸負載力Fbm大于鏟斗液壓缸負載力Fbt,兩執行器載荷差異明顯,動臂液壓缸為重載執行器。當動臂和鏟斗同時接收控制信號時,動臂液壓缸速度vbm在滯后鏟斗液壓缸速度vbt約160 ms才開始響應動作,嚴重影響了操作人員駕駛體驗。此時動臂液壓缸進油腔壓力pA_bm約為11.8 MPa,并且存在明顯波動,鏟斗液壓缸進油腔壓力pB_bt約為5.8 MPa,液壓泵出口壓力由pA_bm決定。在7.5~11.3 s的R2階段,動臂/鏟斗液壓缸復位時,動臂液壓缸在執行機構重力作用下縮回,兩液壓缸進油腔壓力基本相等。
如圖8a所示為動臂和鏟斗液壓回路中壓力補償器的壓力損失和功率損失,如圖8b所示為系統功率及能耗。在R1階段,液壓泵輸出壓力由動臂無桿腔壓力決定,為保證動臂和鏟斗的多路閥進油路壓差相等,鏟斗補償閥的壓差Δpr_bt達9.6 MPa,節流損失Pr_bt達15.4 kW,這部分能量損失正是由兩執行載荷差異造成;液壓系統輸出功率Ps平均值約為131.3 kW,系統節流損失Pts約為30.3 kW。在R2階段動臂/鏟斗復位過程中,Ps平均值45.2 kW,此時動臂重力勢能全部通過多路閥節流損失耗散,系統節流損失Pts達到約118.1 kW。
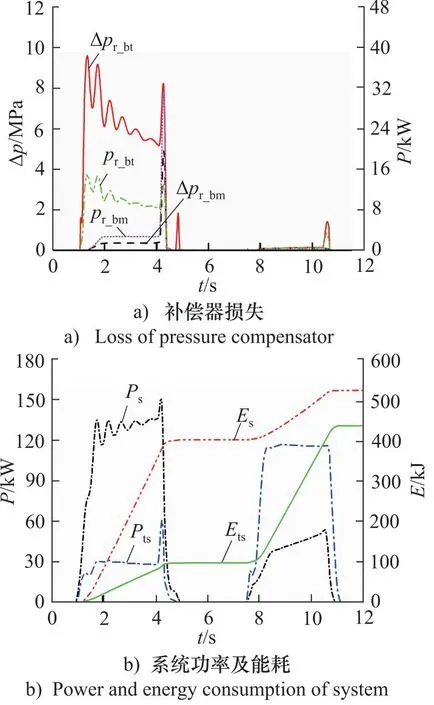
圖8 電液流量匹配系統能量特性
電液流量匹配系統控制動臂/鏟斗的整個運行周期,系統由節流作用造成能量損失Ets為440.2 kJ,系統能耗Es為527.9 kJ。根據式(15)可以計算得到系統平均能效為17%。
(15)
4.2 載荷差異儲能均衡系統
當采用所提出的載荷差異儲能均衡系統,控制動臂/鏟斗按照圖6所示軌跡復合動作,如圖9所示為動臂/鏟斗復合動作的運行特性曲線。
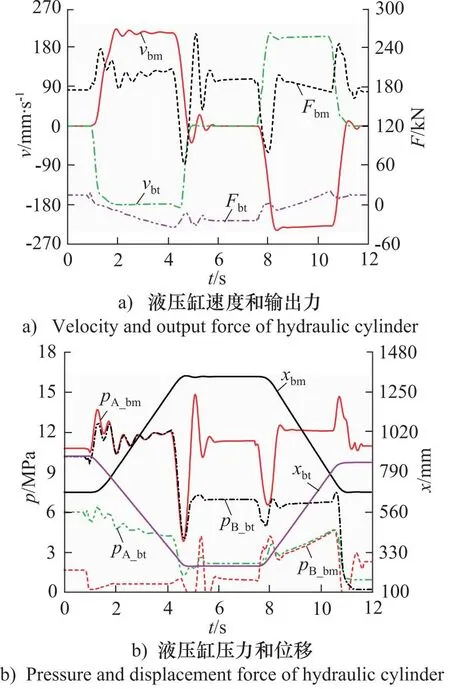
圖9 載荷差異儲能均衡系統運行特性
從圖9可以看出,在1~5.1 s的R1階段,動臂/鏟斗液壓缸完成卸載動作。動臂液壓缸相比鏟斗液壓缸為重載執行器,此時通過鏟斗回路比例閥,控制電液儲能單元與鏟斗液壓缸出油腔連接,對無桿腔壓力進行調控。相比電液流量匹配系統,動臂液壓缸速度vbm在滯后鏟斗液壓缸速度vbt約18 ms開始響應,vbm振蕩3次便趨于平穩,鏟斗液壓缸速度vbt超調量減小達85%,顯著改善了系統運行協調性與平穩性。
在7.5~11.3 s的R2階段動臂/鏟斗液壓缸復位時,動臂液壓缸處于超越縮回工況。此時通過動臂回路比例閥,控制電液儲能單元與動臂液壓缸出油腔連接,將動臂重力勢能轉換液壓能和電能儲存。動臂和鏟斗液壓缸速度平穩,運行特性和電流流量匹配系統基本相同。
在動臂和鏟斗整個運行過程中,通過電液儲能單元對執行器出油腔壓力進行調控,從圖9b可以看出,動臂和鏟斗液壓缸進油腔壓力幾乎相等,從而成功消除了載荷差異造成了額外節流損失。此時,動臂和鏟斗回路多路閥的進油口壓差相等,使載荷差異儲能均衡系統自然具有了傳統壓力補償器的壓差調控功能。
圖10所示為載荷差異儲能均衡系統的能效特性。由于去掉了壓力補償器,動臂/鏟斗在R1和R2運行過程中,系統輸出功率Ps平均值降低至約為125.8 kW和39.4 kW;節流損失Pts分別降低至14.1 kW和30.2 kW。同時,原來在電液流量匹配系統中由于執行器載荷差異和動臂下降時造成的節流損失,在本系統中通過電液儲能單元轉換為液壓能和電能進行儲存,電液儲能單元入口的可回收功率為Pc,對應的能量回收功率為Pre。對Ps,Pts,Pc和Pre進行積分,可以得到動臂和鏟斗復合動作一個周期,系統能耗Es為507 kJ,節流損失造成能量損失Ets為109 kJ,可回收能量為Ec為331 kJ,通過蓄能器和超級電容回收能量Ere為219 kJ。

圖10 載荷差異儲能均衡系統能量特性
動臂鏟斗復合動作一個周期,與電液流量匹配系統相比,載荷差異儲能均衡系統能耗和節流損失分別減小了約3.9%和75.2%。并且,根據式(16),得到系統能量回收效率為66.2%;根據式(17)計算得到系統平均能效為56%。
(16)
(17)
5 結論
本研究提出了載荷差壓電液儲能均衡原理,集成了消除載荷差異節流損失和回收執行機構能量的優點,分析了37 t液壓挖掘機在動臂/鏟斗復合動作工況下的運行特性和能效特性。通過對輕載執行器出油腔壓力進行調控,使各執行器的多路閥壓差保持相等。載荷差壓電液儲能均衡系統消除了載荷差異造成的節流損失。與電液流量匹配系統相比,載荷儲能均衡系統節流損失降低了75%,系統平均效率提升了39%。電液儲能單元可以通過混合動力方式,和主液壓泵共同驅動執行器運行。因此,未來的研究工作將集中在回收能量的高效利用,以進一步降低系統能耗。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
