基于注意力機制和深度殘差網絡的滾動軸承故障診斷
2024-04-29 00:44:03時培明吳術平于越張宇許學方
燕山大學學報 2024年1期
關鍵詞:特征提取
時培明 吳術平 于越 張宇 許學方

摘要:針對現有的滾動軸承診斷模型特征提取能力不足、診斷準確率不高的問題,提出一種注意力機制與一維深度殘差網絡相結合的故障診斷方法。該方法首先通過引入殘差結構來防止深度網絡性能退化,然后結合注意力機制來提高網絡的特征提取能力,最后使用原始的滾動軸承振動信號訓練故障特征分類器。針對變工況故障診斷,本文采用小樣本遷移學習框架。在兩個開源實驗平臺上的結果表明,該方法能夠有效地提高滾動軸承故障診斷的準確率,為實際應用提供一定的理論參考。
關鍵詞:滾動軸承;注意力機制;殘差網絡;特征提取;遷移學習
中圖分類號: TH113.1文獻標識碼: ADOI:10.3969/j.issn.1007-791X.2024.01.0050
引言
滾動軸承是旋轉機械設備中必不可少的零部件之一[1],起著支撐旋轉體、降低傳動設備摩擦系數等作用。滾動軸承已廣泛用在各類工業產品中,如電動機、內燃機等,滾動軸承的健康狀態在很大程度上決定著這些機械設備能否正常運行。一旦滾動軸承出現故障,輕則可能造成設備停機、企業停產,重則可能造成嚴重的生產事故、人員傷亡等[2],給企業生產、國民經濟帶來不小的損失。
深度學習的發展和應用給滾動軸承的故障診斷帶來了新的研究方法,這極大地克服了傳統的基于信號處理方法的特征提取不足、診斷精度不高、需要大量的專家經驗等缺點。
近年來,各種神經網絡在滾動軸承故障診斷的研究和應用層出不窮,研究成果呈現出井噴的增長趨勢。趙小強等[3]改進了傳統的LeNet-5網絡,并采用L2正則化等方法優化了網絡,使得新網絡具備更強的特征提取能力。畢鵬遠[4]提出了一種卷積與長短期記憶網絡相結合的模型,得到了較好的故障診斷精度。譚帥等[5]提出周期記憶神經網絡,利用時序信號內在的時序關聯關系進行故障診斷,實現了軸承的故障診斷。黃磊等[6]基于經驗模態分解、格拉姆算法和GoogLeNet網絡,使得診斷的準確率達到了一定高度。劉杰等[7]基于最小二乘生成對抗網絡和SqueezeNet網絡,提高了樣本不足條件下的故障診斷準確率。姜萬錄等[8]提出一種基于平滑偽WignerVille分布和深度學習相結合的診斷方法,可以較好地識別故障軸承。
上述的各種網絡模型都用到了卷積神經網絡(Convolutional Neural Network, CNN),但其結構都較為固定,主要體現在CNN的感受野(Convolution Receptive Field, CRF)是單一的,這使得神經網絡的適應性受到極大的挑戰,表現為模型特征提取能力不強、訓練成本高等。除此之外,一些學者將一維的振動信號轉換成類似圖片的高維信號來研究,這不僅增加了數據和模型的復雜度,還可能使得振動信號特征丟失[9],從而給診斷過程帶來不必要的麻煩。
選擇性核網絡(Selective Kernel Networks, SKNet)擁有兩路不同的CRF,能有效提高神經元的適應能力,表現為該網絡允許每個神經元根據輸入信息的多個尺度自適應地調整CRF大小,還會通過權重的調整使模型專注于較為重要的特征通道,從而可以更好地識別故障特征,故SKNet又稱為注意力機制。殘差結構通過特有的短接層使得深度網絡性能不會退化,為更深層的網絡搭建提供了基礎。
綜合上述考慮,本文提出一種注意力機制結合殘差結構的網絡模型MSD-ResNet1D(Modified SKNet with Deep ResNet1D)。在兩個數據集上的實踐表明MSD-ResNet1D在滾動軸承故障診斷中有著優良的表現,具有應用價值。
1ResNet1D網絡
1.1殘差結構
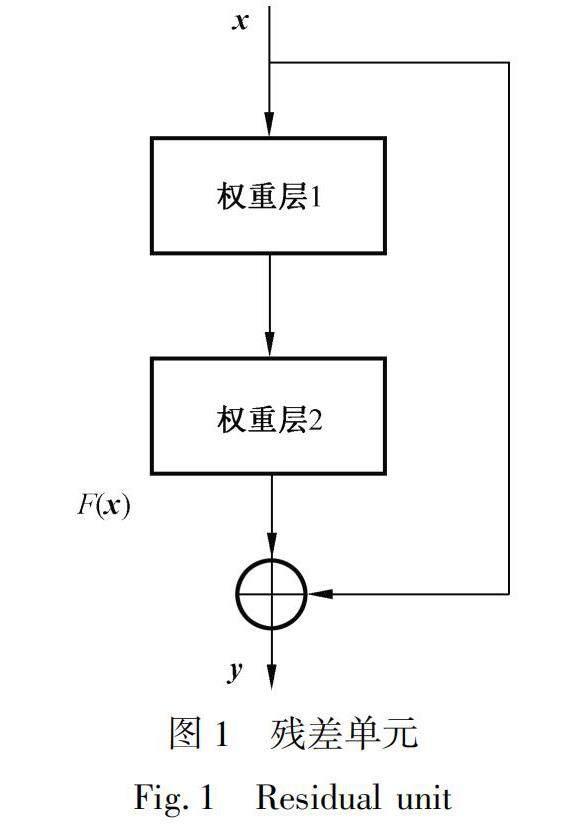
深度殘差網絡擁有獨特的殘差單元[10],其特點在于短接線的引入,如圖1所示。
模型在訓練時,數據經過新增的權重層,如果不能使得梯度下降,那么就僅僅復制淺層特征,即對淺層網絡進行恒等映射,這樣保證了深度網絡的性能不會退化。
殘差單元的輸出公式:
y=F(x)+x, ???(1)
式中,x代表輸入,y代表輸出,F(x)代表經過權重層的結果。
1.2組卷積
組卷積的概念最早出現在2012年提出的AlexNet網絡[11]。使用組卷積后,參數量減少為原來的1/g(g≥1)。不僅如此,組卷積還增加相鄰層過濾器之間的對角相關性,有效防止過擬合的產生。
1.3ResNet1D結構
本文使用一維CNN搭建深度殘差網絡,因為原始的滾動軸承振動數據本身為一維數據,使用一維CNN可以直接對數據進行特征提取,故稱該網絡為ResNet1D。ResNet1D網絡有10層,由1個卷積層、4個殘差單元以及1個全連接層組成,且將ResNet1D的所有卷積設置為組卷積。網絡的詳細信息如表1所示。
2 SKNet網絡
2.1SKNet簡介及改進
SKNet是由Li等人提出的一種輕量化網絡結構[12],用于圖像分類并取得顯著的成績。筆者根據滾動軸承故障診斷的實際背景和數據維度對其進行改進,改進后的網絡(Modified SKNet,M-SKNet)結構如圖2所示。
SKNet的設計體現了多CRF特征融合的思想,使得模型能夠捕獲多尺度的信息,再者是對不同尺寸卷積核的輸出結果進行權重分配,希望更能突出有用的數據信息,故稱其為注意力機制。
2.2空洞卷積
空洞卷積是指在普通卷積核中引入空洞0,以此擴大CNN的CRF,捕獲更大尺度的數據信息。圖2中,Conv_A代表普通的卷積,其卷積核為1×3×C,C代表通道數,而Conv_B代表空洞卷積,其卷積核與Conv_A的一樣,但是其膨脹系數為2,最終其卷積核為大小為1×5×C。
空洞卷積不僅擴大了感受野,并且由于填充了0,所以其計算量也變小了[13]。其次,當Conv_A和Conv_B的結果進行相加時,由于兩個卷積有不同的膨脹系數,將會使得相加的結果攜帶多尺度信息,
U3=U1+U2, ???(2)
式中,U3代表相加的結果。
2.3自適應平均池化
自適應平均池化,即圖2中的Sequeeze操作,公式為
式中,U4代表輸出的結果,U3i代表該維度的元素,N代表該維度元素總量。自適應平均池化的目的是用一個數去表示一個特征通道。
2.4全連接層
圖2中的FC為全連接層,公式為
W=convfd(U4), ???(4)
U5=δ(β(W)), ???(5)
式(4)中,convfd代表卷積核為1×1的卷積,用于代替全連接層,其作用是將數據的通道從f變換到
式(5)中,δ代表RELU激活函數,β代表批歸一化函數。式(6)中,r代表指定的縮小比例,L是一個指定的實驗值,max代表取最大值,int代表取整數值。
2.5Softmax層
圖2中,Softmax層的公式為
式中,Zi代表第i個節點的輸出值,i∈[0,N]。
U5經過Softmax層,得到歸一化的概率值,使得ai+bi=1。
3 MSD-ResNet1D與遷移學習
3.1 MSD-ResNet1D網絡
將ResNet1D與M-SKNet網絡結合在一起,組合成MSD-ResNet1D網絡,其網絡結構和診斷流程如圖3所示。
圖3中,“殘差層M-SKNet”代表的是M-SKNet與殘差層4(如表1所示)的結合。這樣的結合方式,使得M-SKNet網絡在數據進入全連接層之前有選擇性地發揮作用,與殘差結構防止深度網絡性能退化是同理的。
3.2小樣本遷移學習
網絡模型的訓練需要一定的數據量,但實際上在一些工況下數據量短缺,不可能從零開始訓練出良好的模型,針對這個問題,本文采用小樣本遷移學習[14]的方式,即以MSD-ResNet1D為特征提取網絡,以小樣本遷移學習為基本框架。
4早停機機制與隨機定點取樣
4.1早停機機制
在模型的訓練中,訓練的次數較為依靠專家經驗,且模型的訓練次數并不是越多越好,次數過多容易造成模型過擬合,也會影響模型的泛化性能。
為了解決這個問題,本文引用早停機機制EarlyStop的思想,并提出一種結合Metropolis接收準則的早停機機制構想(Metropolis Early Stop, MES)。
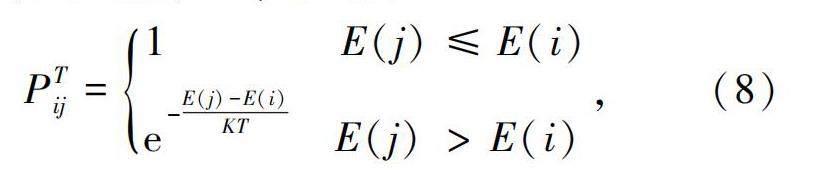
Metropolis準則通常與模擬退火算法相結合,所以也叫退火概率[15],公式為
式中,PTij代表接受的概率,E(i)和E(j)代表物體在狀態i和j下的內能,T代表此刻的溫度,K代表玻爾茲曼常數。MES基本流程如圖4所示。
圖4中,n代表第一階段訓練次數,N代表訓練次數上限。L=SAcc×SLoss,其中SAcc代表準確率較上次變化的趨勢,如果上升,記3分,否則記1分;同理,SLoss代表損失值較上次的變化趨勢,如果下降,記2分,否則記1分。M準則如下:
式中,接收值V即為模型繼續向下訓練的概率。
相較于Pytorch、TensorFlow等深度學習框架提供的早停機API而言,MES機制有著更高的靈活性和實際問題針對性,表現在該機制可以根據需求設置和使用。
4.2隨機定點取樣
傳統的按順序采樣(Order Sampling, OS)的數據,由于過多的時序依賴而使模型不可避免地具有較強的思維定式,模型的泛化性能存疑,而實際工況下采集的數據不一定是連續的,具有很強的隨機性。為此本文提出一種數據的取樣方式——隨機定點取樣(Random Sampling, RS),取樣過程如圖5所示。
圖5中,i,j≥1且i≠j,n,m≥1且n≠m。這種方式取出的來的數據具有隨機、多樣以及交叉融合的性質,前后兩組數據有一定的相關性,但不一定強,更能模擬出實際工況下取出的數據狀態。
5實驗
5.1實驗數據
選取兩個實驗平臺的滾動軸承振動數據,因為振動信號易于測量和采集,而且包含了豐富的故障信息[16]。
1) 凱斯西儲大學數據集[17],簡稱CWRU數據集。數據集詳細信息如下:采樣頻率為12 kHz,故障尺寸分別為0.177 8、0.355 6、0.533 4 mm,負載電機功率分別為0、1、2、3 hp,測點為驅動端(Driver End,DE)、風扇端(Fan End, FE),數據類別有:內圈故障、外圈故障、滾動體故障、正常。
2) 江南大學數據集[18],簡稱JN數據集。數據集詳細信息如下:采樣頻率為50 kHz,轉速分別為600、800、1 000 r/min,數據類別與CWRU數據集的類別相同。
由(1)的表述可知,CWRU數據每類故障有3種尺寸,所以故障類別可以分為10小類(考慮故障尺寸)或4大類(不考慮故障尺寸),且CWRU數據由于實驗平臺的原因顯得較為理想,為了模擬實際工作環境,以信噪比(Signal to Noise Ratio, SNR)的形式給CWRU數據集添加噪聲,信噪比的表達式為
其中,PS和PN分別代表信號和噪聲的有效功率,通常認為當SNR≤0時,信號處于強噪聲環境。
5.2對比模型
為了與同類方法(基于深度學習的方法)在診斷準確率、模型參數量等方面進行對比,選取并搭建一些常用的網絡。
1) ResNet1D:該網絡與MSD-ResNet1D相比,僅缺少M-SKNet。
2) ResNet2D:該網絡的結構與(1)相同,只是將一維 CNN換成了二維 CNN。
3) LeNet5:該網絡是由科學家Yann Lecun等人提出[19],由二維 CNN、池化層、全連接層組成,選用RELU激活函數。
4) MLP:搭建多層感知機MLP模型,選用Adam優化器,學習率0.001,隱藏層數為5。
5.3實驗結果
5.3.1實驗一:非變工況實驗
訓練MSD-ResNet1D模型。選取CWRU數據集0HP工況下DE端數據,分10個類別,按照隨機定點取樣的方式,每個類別選取50組數據,每組數據包含625個數據點,作為訓練集TrainingSet。不重合地選取一定的數據作為驗證集VaildingSet。引入MES早停機機制,在該機制內,對模型準確率的需求設置為95%,達到后允許繼續尋優。模型訓練時的損失和分類準確率、故障數據召回率隨次數的變化如圖6所示。
通過引入MES機制,模型僅訓練了33次。選取不同于TrainingSet和VaildingSet的數據作為測試集TestingSet,得到模型在10類下的準確率為99.1%,在4類下的準確率為99.2%,故障數據召回率、故障數據精確度均為100%,混淆矩陣如圖7所示。
圖7中,G1、G2、G3代表滾動體故障大類,G4、G5、G6代表內圈故障大類,G7、G8、G9代表外圈故障大類。使用相同的TrainingSet訓練其他模型,根據實際的模型情況調整訓練次數,分別得到效果最好的各類模型。隨機選取測試數據5次,分別得到ResNet1D、ResNet2D、LeNet5,MLP模型在10類別下的準確率均值為(95.4±0.4)%、(90.6±0.6)%、(85.4±0.5)%、(80.9±0.5)%。可以看出,本文所提模型的診斷準確率最高。各模型參數總量(Params)和浮點運算數(FLOPs)如表2所示。
由表2可以看出,由于組卷積、M-SKNet網絡的使用,MSD-ResNet1D的參數總量是所提模型中最小的,浮點運算數值僅大于LeNet5,MSD-ResNet1D擁有輕量、簡便的特點。
為了能模擬實際工作環境下的故障診斷情形,給TestingSet添加不同程度的信噪比,故障類別分為4大類即可,各模型5次測量的平均準確率如表3所示。
加入噪聲后,各模型故障診斷的準確率都有所下降,但本文所提模型的平均準確率依然維持最高水平,說明M-SKNet的加入使得模型具備更強的特征提取能力和較強的魯棒性。
使用JN數據集,選取轉速為600 r/min下的數據,訓練集TrainingSet、驗證集VaildingSet、測試集TestingSet數據的整理和模型的訓練過程不再贅述,得到MSD-ResNet1D模型的訓練次數為48次,診斷準確率為96.5%,故障數據召回率為99.6%。以相同的方式訓練其他模型,分別得到ResNet1D、ResNet2D、LeNet5、MLP模型在600 r/min的轉速數據下5次測試的準確率均值為(93.0±0.4)%、(90.2±0.3)%、(50.7±0.5)%、(40.6±0.4)%,MSD-ResNet1D仍然具有最高的診斷準確率。與ResNet1D網絡的對比證明M-SKNet的加入起到了積極作用,此外,通過與LeNet5、MLP的對比可以證明殘差結構是模型性能的一個重要保證。
5.3.2實驗二:變工況實驗
本小節針對MSD-ResNet1D網絡模型和數據采樣方法,在不同工況下進行實驗。
使用OS和RS兩種采樣方法,在CWRU的0HP-DE工況下采樣相同量的訓練數據TrainingSet_OS和TrainingSet_RS,訓練相同的次數,分別得到模型C_OS和C_RS。同理,在JN數據集600 r/min轉速的數據集下,得到模型J_OS和J_RS。測試數據也分為按順序取樣Testing_OS和隨機定點取樣Testing_RS數據,簡稱TO和TR,上述4個模型在各數據集的其他工況下,診斷的準確率如表4所示(CWRU測試數據無噪聲,數據類別均為4類)。
由表4可以看出,在兩個實驗平臺上,通過隨機定點取樣的訓練數據,能夠訓練出泛化性能更強的網絡模型,具體表現為:在其他工況下,模型C_RS、J_RS比C_OS、J_OS具有更高的診斷準確率,且在在不同工況的TO和TR測試數據下,診斷的準確率都較為穩定。
上述C_RS模型在CWRU變工況以及帶噪聲的測試數據上的診斷準確率如表5所示(數據類別為4類)。
由上述實踐結果可知,某一工況數據下訓練好的模型并不能直接用于其他工況,否則將導致故障診斷的準確率低下,這是因為數據在不同的工況下有不同的分布特征。針對這個問題,本文采用小樣本遷移學習的方法。
CWRU數據集中,僅選取0HP-FE端下的每個類別各5組隨機定點采樣的數據(無噪聲),作為遷移數據集,以C_RS模型為遷移對象。不重合地選取驗證集VaildingSet和測試集TestingSet,結合MES機制,設定模型準確率要求為95%。遷移訓練過程中,模型的損失、準確率和故障類別召回率隨訓練次數的變化曲線如圖8所示。
經過小樣本遷移學習,得到遷移模型C_RS_0-FE。由于訓練數據集較少,所以訓練的次數較多,一共訓練了67次,且在訓練過程中,驗證集的10類準確率長期沒有達到設定的95%,故MES機制提前結束了訓練過程。使用測試集TestingSet數據,C_RS_0-FE診斷的準確率為92.8%(10類別)或96.4%(4類別),故障數據召回率和精確度均為100%,混淆矩陣如圖9所示。
相較于C_RS模型直接用于0HP-FE端數據,遷移后的模型,故障診斷準確率提升了47.6%,體現出MSD-ResNet1D網絡可觀的特征提取能力和遷移學習的優良性能。
使用類似的方法,以C_RS模型為遷移對象,對CWRU數據集DE端、FE端的各工況以及各種噪聲狀態進行小樣本遷移學習。以J_RS為遷移對象,對JN數據集800 r/min、1 000 r/min轉速的數據進行小樣本(5組/工況·類別-1)遷移學習。再以C_RS為遷移對象,以JN數據集三個工況的小樣本數據為遷移數據,進行跨域(跨實驗平臺遷移)。得到遷移后各數據集、各工況、跨域下,故障診斷的準確率如表6所示(故障類別均為4類)。
表6中CWRU→JN表示跨域遷移。從表6實驗數據可以看出,MSD-ResNet1D模型配合小樣本遷移學習框架,在變工況環境下取得了非常不錯的診斷準確率,在跨域診斷上也表現得較好。
使用相同的遷移數據對ResNet1D網絡進行小樣本遷移學習,作為一組對比實驗,因為在5.3.2節各模型對比中,ResNet1D準確率僅次于MSD-ResNet1D。使用實驗一中訓練好的ResNet1D模型,做與上表相同的遷移測試,得到表7所示的實驗結果。
表7中,“(↑)”符號代表該位置準確率優于表6中對應位置的值,但表7中實驗數值普遍小于表6實驗數值,證明本文對注意力機制SKNet的改進和應用是有助于網絡性能提升的。
6結論
本文提出的基于注意力機制和深度殘差網絡的滾動軸承故障診斷方法是一種集合型方法,通過實驗驗證可以得到以下結論:
1) 注意力機制SKNet的改進和使用優化了原始網絡性能,提高了網絡的故障數據特征提取能力,為后續特征分類器的訓練提供了基礎,且SKNet具有輕量簡便的優點,便于應用部署,在滾動軸承故障診斷方面具有一定的優越性。
2) 經實驗對比,通過殘差結構搭建的網絡模型診斷的準確率都相對較高,說明基于殘差結構的網絡有著優良的性能,這是因為殘差結構有效地防止了深度網絡性能退化。
3) 本文所提方法配合小樣本遷移學習框架有效地解決了變工況和跨域條件下的滾動軸承故障診斷問題,取得了不錯的診斷準確率,優于現有主流網絡,可用于實際工業環境的滾動軸承故障診斷中。
參考文獻
[1] JIA F,LEI Y G,LIN J,et al. Deep neural networks:a promising tool for fault characteristic mining and intelligent diagnosis of rotating machinery with massive data[J]. Mechanical Systems and Signal Processing,2016,72/73:303-315.
[2] JIAO J, ZHAO M, LIN J, et al. Hierarchical discriminating sparse coding for weak fault feature extraction of rolling bearings[J]. Reliability Engineering & System Safety, 2019, 184:41-54.
[3] 趙小強,羅維蘭.改進卷積Lenet-5神經網絡的軸承故障診斷方法[J].電子測量與儀器學報,2022,36(6):113-125.
ZHAO X Q, LUO W L. Bearing fault diagnosis method based on improved convolutional Lenet-5 neural network [J]. Journal of Electronic Measurement and Instrument, 2022, 36(6): 113-125.
[4] 畢鵬遠.一種基于Conv-LSTM的滾動軸承故障診斷方法[J]. 機電工程技術,2021,50(11):113-115.
BI P Y. A Conv-LSTM-based fault diagnosis method for rolling bearings [J]. Electromechanical Engineering Technology, 2021, 50(11): 113-115.
[5] 譚帥,馬遙,侍洪波,等. 基于時序關聯分析的旋轉機械故障診斷[J]. 振動與沖擊,2022, 41(8): 171-178.
TAN S, MA Y, SHI H B, et al. Fault diagnosis of rotating machinery based on time series correlation analysis [J]. Journal of Vibration and Shock, 2022, 41(8): 171-178.
[6] 黃磊,馬圣,曹永華.基于GAF與GoogLeNet的軸承故障診斷研究[J].機床與液壓,2022,50(1):193-198.
HUANG L, MA S, CAO Y H. Research on bearing fault diagnosis based on GAF and GoogLeNet[J]. Machine Tool & Hydraulics,2022,50(1):193-198.
[7] 劉杰,李長杰,蘇宇涵,等. 基于LSGAN-SqueezeNet的軸承故障診斷研究[J].振動與沖擊,2022,41(12):293-300.
LIU J, LI C J, SU Y H, et al. Research on bearing fault diagnosis based on LSGAN-SqueezeNet [J]. Journal of Vibration and Shock,2022,41(12):293-300.
[8] 姜萬錄,李振寶,雷亞飛,等.基于深度學習的滾動軸承故障診斷與性能退化程度識別方法[J].燕山大學學報,2020,44(6):526-536.
JIANG W L,LI Z B,LEI Y F, et al.Deep learning based rolling bearing fault diagnosis and performance degradation degree recognition method[J].Journal of Yanshan University,2020,44(6):526-536.
[9]? 劉嵐, 侯立群. 基于改進一維殘差網絡的軸承故障診斷[J]. 儀器儀表用戶, 2021,28(9): 45-50.
LIU L, HOU L Q. Bearing fault diagnosis based on improved one-dimensional residual network [J]. Instrument User, 2021,28(9): 45-50.
[10] 張小剛, 丁華, 王曉波,等. 深度殘差網絡在滾動軸承故障診斷中的研究[J]. 機械設計與制造,2022(1):77-80.
ZHANG X G,DING H, WANG X B, et al. Research on deep residual network in rolling bearing fault diagnosis [J]. Machinery Design & Manufacture, 2022(1):77-80.
[11] KRIZHEVSKY A, SUTSKEVER I, HINTON G E.Imagenet classification with deep convolutional neural networks[J]. Communicationsof the ACM, 2017, 60(6): 84-90.
[12] LI Z, HU F, WANG C, et al. Selective kernel networks for weakly supervised relation extraction[J]. CAAI Transactions on Intelligence Technology, 2021, 6(2): 224-234.
[13] QIN Y, LUO H, Zhao F, et al. NDGCN: network in network, dilate convolution and graph convolutional networks based transportation mode recognition[J]. IEEE Transactions on Vehicular Technology, 2021, 70(3):2138-2152.
[14] 陳仁祥, 唐林林, 胡小林,等. 不同轉速下基于深度注意力遷移學習的滾動軸承故障診斷方法[J]. 振動與沖擊, 2022, 41(12): 95-101.
CHEN R X, TANG L L, HU X L, et al. Rolling bearing fault diagnosis method based on deep attention transfer learning at different speeds [J]. Journal of Vibration and Shock, 2022, 41(12): 95-101.
[15] JIANG P,GE Y, WANG C. Research and application of a hybrid forecasting model based on simulated annealing algorithm: a case study of wind speed forecasting[J]. Journal of Renewable & Sustainable Energy, 2016, 8(1):226-239.
[16] 王國彪, 何正嘉, 陳雪峰,等. 機械故障診斷基礎研究“何去何從”[J]. 機械工程學報, 2013, 49(1):63-72.
WANG G B, HE Z J, CHEN X F, et al. "Where to go" for basic research on mechanical fault diagnosis [J]. Chinese Journal of Mechanical Engineering, 2013, 49(1): 63-72.
[17] LOPARO K A. Western Reserve University bearings data center website [EB/OL].[2022-12-15].https://engineering.case.edu/bearingdatacenter/download-data-file.
[18] LI K, PING X, WANG H, et al. Sequential fuzzy diagnosis method for motor roller bearing in variable operating conditions based on vibration analysis [J].Sensors,2013, 13(6):8013-8041.
[19] LECUN Y, BOTTOU L.Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11):2278-2324.
Rolling bearing fault diagnosis based on attention mechanism
and depth residual network
SHI Peiming1, WU Shuping1, YU Yue1, ZHANG Yu2, XU Xuefang1
(1. School of Electrical Engineering, Yanshan University, Qinhuangdao, Hebei 066004, China;
2. School of Vehicle and Energy, Yanshan University, Qinhuangdao, Hebei 066004, China)
Abstract:Aiming at the problems of insufficient feature extraction ability and low diagnosis accuracy of existing rolling bearing diagnosis models, a fault diagnosis method combining attention mechanism and one-dimensional depth residual network was proposed. Firstly, the residual structure was introduced to prevent the performance degradation of the deep network, and then the feature extraction capability of the network was improved by combining the attention mechanism. Finally, the original rolling bearing vibration signals were used to train the fault feature classifier.In this paper, a small sample transfer learning framework was adopted for fault diagnosis in variable working conditions. The result of two open source experimental platforms shows that this method can effectively improve the accuracy of rolling bearing fault diagnosis and provide a theoretical reference for practical applications.
Keywords:rolling bearing; attention mechanism; residual network; feature extraction; transfer learning
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49