精密導向膜片設計與優化*
2024-04-29 05:49:10周洪海徐振邦王學問
組合機床與自動化加工技術 2024年4期
關鍵詞:優化
周洪海,秦 超,徐振邦,王學問,鞏 浩,陳 洋
(1.中國科學院長春光學精密機械與物理研究所,長春 130033;2.中國科學院大學,北京 100049;3.中國科學院空間光學系統在軌制造與集成系統重點實驗室,長春 130033)
0 引言
隨著精密光學技術的不斷發展,光學設施對精密調整機構的精度要求越來越高,有的甚至達到納米、亞納米級水平[1-3]。傳統的導向或調節機構如導軌、絲杠螺母、凸輪機構等,存在摩擦、側隙、需要潤滑、精度低等缺點。而且在制造和組裝過程中也存在不可避免的誤差。雖然有著大行程、高穩定性等優點,但并不適用于超精密導向、調整領域。
為了解決這些問題,柔性機構逐漸成為當下的研究熱點。相對于傳統的導向或調節機構,柔性機構具有更小的體積、更高的靈敏度、沒有機械摩擦和齒隙等優點,被廣泛應用于高性能顯微鏡、光刻機物鏡系統、微定位臺等精密調整、導向機構中[4-9]。通過使用柔性機構代替傳統機構,可以實現納米甚至亞納米級的高精度調整,從而滿足現代光學技術所需的要求[10]。因此,柔性機構將成為未來精密光學技術中不可或缺的一部分。
曾超等[11]設計了一種納米精度的位移機構,采用平面連桿柔性鉸鏈實現了0.2 mm的運動行程和1.1 nm(均方根誤差)的高位置穩定性。趙磊等[12]用直梁型柔性鉸鏈代替傳統的轉動副,設計了一款用于光刻投影物鏡中的x-y面內的微動調整機構。張德福等[13]采用由倒角形柔性鉸鏈構成的對稱平行四邊形機構來實現z向的位置調整。但以上結構的適配性相對較差,整體的位移調整模型需要圍繞著柔性鉸鏈搭建。
如圖1所示,本文設計了一種以繞中心均勻分布的6條柔性梁為柔性部分的導向膜片。通過6條柔性梁的彎曲來約束中心平臺的運動,使光學元件嚴格沿軸向平移。這種結構表現為低軸向剛度和高徑向剛度,能夠抑制垂直于運動軸向的寄生運動。而且膜片結構尺寸小、可單獨加工。在使用時將膜片固定在基座即可,安裝方便,與整體結構的適配性好。

(a) 導向膜片組成 (b) 導向膜片的工作原理
本文采用柔度矩陣法對膜片內圈進行建模,列出柔度矩陣并通過有限元分析驗證了公式的正確性。然后根據使用需求,對結構進行了優化,提高了軸向柔度、軸向/徑向柔度比和最小應力的指標數值。優化后的結構可用在由小型音圈電機驅動、具有微米級行程的精密導向機構上。
1 精密導向膜片的組成及工作原理
精密導向膜片如圖1所示。膜片的柔性由6條繞中心對稱的柔性梁組成,膜片的外圈和內圈被固定約束,因為約束后的剛度遠大于柔性梁結構,可將膜片內圈,外圈視為剛體。為了增強膜片在受到軸向力時的柔性,可以采取以下措施:減小柔性梁厚度并增大長度,這有助于柔性梁發生彎曲變形。此外,由于軸向運動會產生寄生的徑向運動,為了抑制這種運動,需要增大柔性梁寬度,提高其在平面內的抗拉壓和抗剪切能力。
2 基于柔度矩陣法的柔度建模
2.1 建立單條柔性梁的柔度矩陣
在導向膜片的使用過程中,膜片外圈不發生運動,膜片內圈和導向桿件的運動相同。由于導向膜片的變形主要集中于柔性梁,此時需要建立柔性梁的柔度模型來分析其支承和導向的性能。如圖2所示,柔性梁連接外圈的一端為固定約束,連接內圈的一端為自由端。
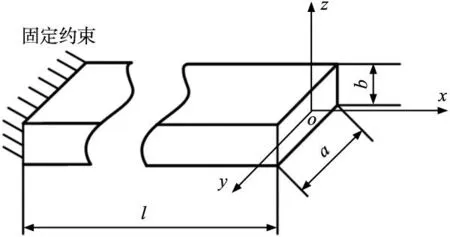
圖2 柔性梁末端的局部坐標系
對膜片內圈進行軸向運動和徑向運動時的受力分析,軸向運動與徑向運動的受力分析圖如圖3a和圖3b所示。

(a) 軸向運動受力分析 (b) 徑向運動受力分析
如圖3a所示,在膜片發生軸向運動時,因柔性梁的分布為膜片內圈各邊的中心,所以6條柔性梁沿各自局部坐標軸x方向力Fx1、Fx2、Fx3、Fx4、Fx5、Fx6它們的作用線穿過膜片內圈的形心,對形心的作用為矢量力的疊加。而沿局部坐標軸z方向的力Fz1、Fz2、Fz3、Fz4、Fz5、Fz6它們會對形心產生力矩作用,對形心的作用為矢量力與力矩的疊加。同理可知在膜片軸向運動和徑向運動時柔性梁末端施加給膜片中心Fx、Fy、Fz、My、Mz的作用,根據受力特點列出單條柔性梁末端的局部柔度矩陣。
柔性梁末端受F=[Fx,Fy,Fz,Mx,My,Mz]T的作用,其對應的變形可以表示為:
δ=CF
(1)
式中:變形δ=[Δx,Δy,Δz,Δα,Δβ,Δγ],柔性梁的柔度矩陣Ci(i=1,2,3,…,6)為:
(2)
式中:柔度系數CΔx-Fx、CΔy-Fy、CΔy-Mz、CΔz-Fz、CΔz-My、CΔα-Mx、CΔβ-Fz、CΔβ-My、CΔγ-Fy、CΔγ-Mz分別為:
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
對x軸慣性矩:
Ix=βab3
(13)
對y軸慣性矩:
(14)
對z軸慣性矩:
(15)
2.2 建立膜片的整體柔度矩陣
膜片中6條獨立的柔性梁為并聯連接。為了獲得整個膜片的柔度矩陣,需要將局部坐標系轉換為用于描述整個膜片的整體坐標系。
把以各柔性梁末端中心為原點建立的坐標系oi-xiyizi稱為局部坐標系,把以膜片內圈中心為原點建立的坐標系o-xyz稱為整體坐標系。局部坐標系與整體坐標系的關系如圖4所示。以整體坐標系為基準,因6條柔性梁均勻分布,各局部坐標系至整體坐標系的旋轉角度θ為0°、60°、120°、180°、240°、360°。局部坐標原點與整體坐標原點的距離為r。

圖4 局部坐標系與整體坐標系示意圖
如圖4所示,設第i條柔性梁在局部坐標系oi-xiyizi的柔度為Ci,根據柔度矩陣法,建立空間變換矩陣Toi將單元柔度矩陣從局部坐標系oi-xiyizi轉到整體坐標系上。第i(i=1,2,3,4,5,6)條柔性梁的整體柔度矩陣為:
Coi=ToiCi(Toi)T
(16)
式中:第i(i=1,2,3,4,5,6)條柔性梁的變換矩陣Toi為:
(17)
最后,膜片整體的柔度矩陣為:
(18)
2.3 膜片內圈在軸向力下的運動求解
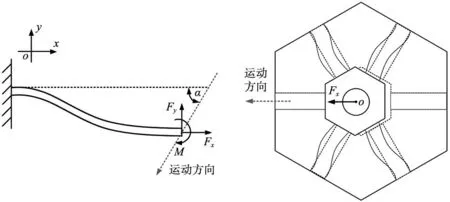
當施加載荷F=[0,0,1,0,0,0]T時,根據式(18)求出的整體柔度矩陣可以得到變形量為:δ=[0,0,l3/72EIy,0,0,0]T。由上述公式推導結果可知,當膜片內圈受到力Fz,膜片內圈只有z方向的位移。即單條柔性梁末端的x向位移為0,末端轉角為0,單條柔性梁以及膜片整體的變形如圖5所示。

(a) 單條柔性梁的變形示意圖 (b) 膜片在x-z平面的變形示意圖
從上述分析可知,當受到z向力時,單條柔性梁對膜片內圈有x、z方向的運動以及繞y、z方向的角運動,但關于中心對稱的兩條柔性梁對膜片內圈x的運動和y、z的角運動相互抵消。只保留了z方向上的位移,z方向上的柔度為:
Cz=l3/72EIy
(19)
2.4 膜片內圈在徑向力下的運動求解
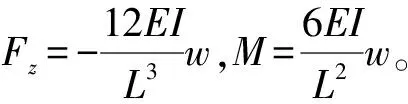
在運動元件帶動膜片做徑向運動時,其對膜片內圈的作用力可認為穿過形心,設其在x-y平面內作用力為Fr、與x軸的夾角為β。用F=[Frcosβ,Frsinβ,0,0,0,0]T表示其對形心的作用力,根據整體柔度矩陣得到變形量δ=[l3/3E(abl2+12Iz)]·[Frcosβ,Frsinβ,0,0,0,0]。由上述公式推導結果可知,膜片內圈在x-y平面內有以下特性:①運動方向與施加力方向相同。②任何運動方向的柔度相同。圖6為其效果圖。以Cr表示其在x-y平面的柔度。
(a) 單條柔性梁的變形示意圖 (b) 膜片內圈在x-y平面的變形示意圖
Cr=l3/3E(abl2+12Iz)
(20)
3 結構優化
根據導向膜片的使用特點,優化膜片的3個參數來提升其性能。首先,需要提高導向膜片的軸向柔度以確保其調節和導向能力;其次,需要提高導向膜片的徑向柔度,以抑制寄生的徑向運動;最后,膜片在運動行程內的最大應力應小于許用應力,且應降低最大應力的值,這能夠提高結構的安全可靠性、減少疲勞損傷并降低成本。
3.1 優化目標
3.1.1 軸向柔度
目前,由于音圈電機具有響應速度快、運動部件質量輕、無力紋波、非接觸式進給驅動、易于控制等超精密定位特性[14],被廣泛應用于精密導向調整機構的驅動裝置中。目前直徑在5 cm之內的音圈電機驅動力約為0~10 N,為了得到微米級以上的行程,需增大膜片在軸向的柔度,使其至少要大于2×10-3mm/N。
3.1.2 優化軸向/徑向柔度比
如圖1a所示,在運動元件運動過程中,實際軌跡與理想軌跡的同軸度越小,運動精度越高。本文使用軸向/徑向柔度比[15]來衡量運動軌跡的偏離程度。在同樣的約束條件和行程下,軸向/徑向柔度比越高,軌跡的偏離程度越小,軌跡越接近軸線位置。本文設計的導向膜片軸向/徑向柔度比為:
(21)
3.1.3 優化軸向運動最大應力
由第2節分析可知,在膜片軸向運動過程中,單條柔性梁的末端的轉角為0,z方向上的位移為w,根據疊加法列出平衡方程:
(22)
(23)
由圖7可知,在沿z向運動時柔性梁的最大彎矩可能出現在其兩端,分別對兩端的彎矩進行計算。
(24)
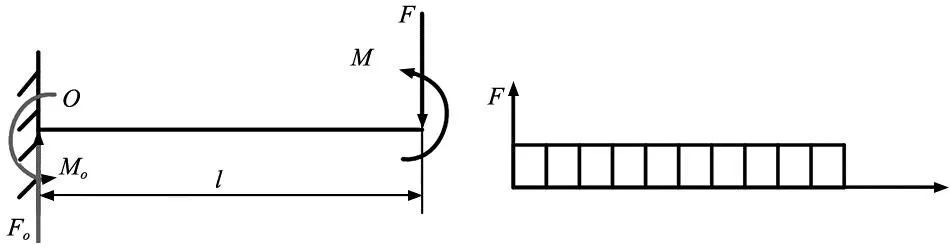
(a) 受力分析圖 (b) 剪力圖
由推導結果可知,首末兩端彎矩的大小相等,方向相反。
(25)
根據公式計算,最大應力出現在柔性梁局部坐標系x=0,y=2/b或x=l,y=2/b處,最大應力值為σmax=3Ebw/l2,w為柔性梁的撓度。
3.2 優化柔性梁的結構參數
根據式(19)、式(21)和式(25)可推導出膜片軸向柔度、軸向/徑向柔度比、最大應力值與柔性梁厚度b以及柔性梁長度l的關系,如圖8所示。當b變小或l變大時,軸向柔度變大、軸向/徑向柔度比變大、最大應力值變小。與期望的優化結果相同。當a變化時,軸向柔度與軸向/徑向柔度比變化的方向相反。根據膜片的實際使用要求及柔性梁的特點對a的值進行優化,設置邊界條件為:
(26)
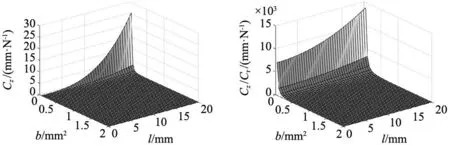
(a) Cz與b、l的關系 (b) Cz/Cr與b、l的關系
式中:[σ]為材料的彈性許用應力,本文膜片使用的鋁合金的彈性許用應力約為240 MPa。以a取值范圍的中值a=5為標準,賦予軸向柔度、軸向/徑向柔度比的權重分別為0.4、0.6建立優化函數:
(27)
U與a的關系如圖9所示。U在區間的最大值為1.03,此時a=6。優化前與優化后的參數如表1、表2所示。優化后的膜片的柔度為4.2×10-3mm/N,圖8b所示機構在0~10 N驅動力作用下的最大應力值為9.03 MPa,滿足使用要求。

表1 優化前柔性梁參數及理論計算結果

表2 優化后柔性梁參數及理論計算結果
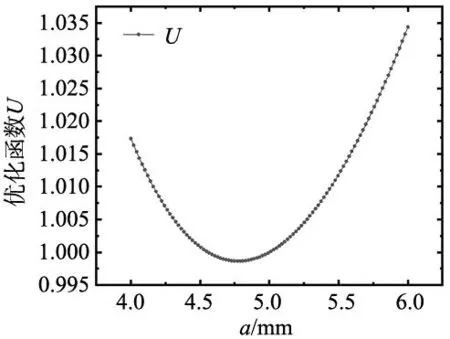
圖9 優化函數U隨a的變化圖
4 柔度模型的有限元和實驗驗證
圖10為有限元分析中的網格圖。對膜片內圈在x、y、z方向分別施加1 N的力得到表3和表4的結果,膜片的位移變化云圖如圖11和圖12所示。從表3和表4中可以看出優化前后理論計算柔度與仿真計算柔度x、y方向最大誤差為6.7%,z方向的最大誤差為4.3%皆處于可接受范圍內。仿真結果與計算結果存在誤差的原因主要來自兩個方面:①網格單元的劃分類型與網格質量存在影響;②理論計算中并未將與柔性梁相連膜片內圈的柔度計算在內,而仿真中膜片內圈有微量的變形并與柔性梁結構存在耦合關系,影響了仿真結果。
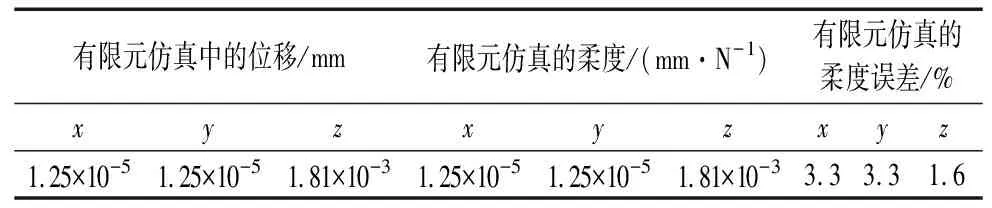
表3 優化前的有限元計算結果
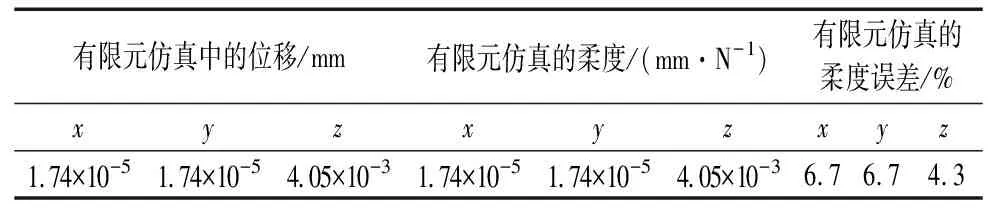
表4 優化后的有限元計算結果
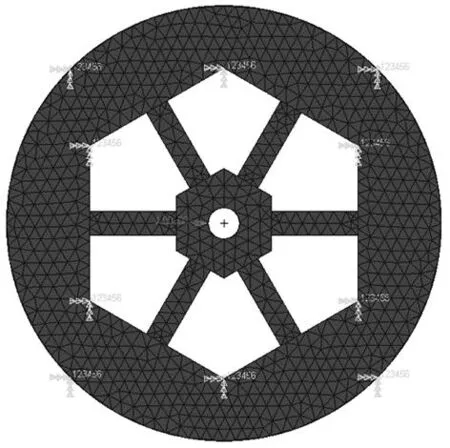
圖10 有限元網格圖

(a) 在x向力作用下 (b) 在y向力作用下
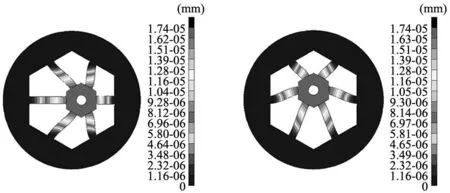
(a) 在x向力作用下 (b) 在y向力作用下
為了驗證柔度模型的準確性,搭建了柔度測試系統,其原理如圖13所示。壓力測試儀用來測量施加在膜片上的z向壓力,電子高度尺測量膜片的z向變形量。通過測量不同壓力下的z向變形量得到實驗結果如圖14所示。其中數據擬合曲線的斜率就是膜片的z向柔度。實測模型z向柔度與理論計算柔度的相對誤差為7.8%,驗證了本文方法的可行性。
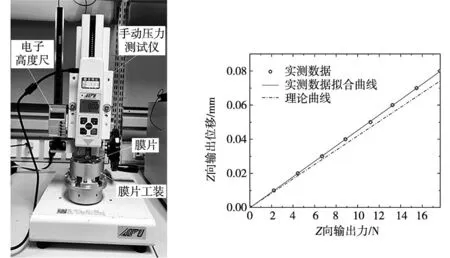
圖13 柔度測試裝置
5 結論
(1)提出了一種具有精密導向作用的柔性膜片,建立其軸向與徑向柔度的理論計算模型,并通過有限元分析與實驗測試,驗證了理論模型的正確性。
(2)分析了單條柔性梁參數對導向膜片軸向與徑向柔度的影響。
(3)以導向膜片的高軸向柔度、高軸向/徑向柔度比和低應力為目標,建立其優化設計模型,通過對不同目標權重比例的分配,對柔性梁結構參數進行目標優化。優化結果顯示,軸向/徑向柔度比優化率為172%,軸向柔度優化率為233%,最大應力優化率為32%。優化結果完全符合預期,說明優化結果具有可行性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
