基于人工智能的煤礦皮帶輸送系統(tǒng)設計與實現(xiàn)
2024-05-06 05:43:48王帥
裝備制造技術 2024年3期
王 帥
(平頂山天安煤業(yè)股份有限公司五礦,河南 平頂山 467000)
0 引言
在當今工業(yè)化和信息化的快速發(fā)展下,煤炭作為基礎能源的重要性不言而喻。煤礦皮帶輸送系統(tǒng),作為煤炭生產(chǎn)中的核心環(huán)節(jié),承擔著將煤炭從采礦點有效、安全地輸送到指定位置的關鍵任務。隨著科技的進步,特別是人工智能技術的突破,如何利用這些先進技術優(yōu)化煤礦皮帶輸送系統(tǒng),成為電氣技術與經(jīng)濟領域的一個研究熱點。煤礦皮帶輸送系統(tǒng)的高效與安全直接關系到煤炭資源的有效利用及工作人員的生命安全,提高其自動化和智能化水平是實現(xiàn)煤礦生產(chǎn)現(xiàn)代化的重要手段。
1 人工智能的煤礦皮帶輸送系統(tǒng)設計與實現(xiàn)
1.1 硬件結(jié)構(gòu)設計與實現(xiàn)
1.1.1 井下監(jiān)控分站設計
在技術要素方面,井下監(jiān)控分站的設計需要綜合考慮數(shù)據(jù)采集、信號處理、通信接口和人工智能算法的實現(xiàn),圖1 為皮帶輸送機監(jiān)控分站結(jié)構(gòu)示意圖[1]。在硬件結(jié)構(gòu)設計中,人工智能的體現(xiàn)主要在于傳感器的集成和高級控制系統(tǒng)的設計。傳感器不僅用于監(jiān)測基本參數(shù),如溫度、壓力和負載,還用于收集更復雜的數(shù)據(jù),如圖像和聲音,以支持更高級的AI 分析。數(shù)據(jù)采集模塊須精確、可靠,能夠捕捉到關鍵監(jiān)控參數(shù),如皮帶速度、負載量、溫度等。信號處理模塊應有強大的數(shù)據(jù)處理能力,能夠?qū)崟r處理大量的傳感器數(shù)據(jù),確保信息的精確傳輸。通信接口則要保證與上位機及其他監(jiān)控分站的高效、穩(wěn)定連接。同時,人工智能算法的應用需要基于深度學習和模式識別技術,以實現(xiàn)復雜環(huán)境下的數(shù)據(jù)分析和決策支持。在設計原則上,井下監(jiān)控分站的設計強調(diào)了可靠性、安全性和可擴展性。可靠性是指系統(tǒng)能夠在惡劣的井下環(huán)境中長期穩(wěn)定運行,對各種干擾有良好的抵抗能力[2]。安全性則涉及系統(tǒng)設計必須符合煤礦安全生產(chǎn)的相關規(guī)定,能夠在出現(xiàn)危險情況時及時預警和采取措施。可擴展性表明監(jiān)控分站在未來能夠適應新技術的集成和系統(tǒng)升級,以適應不斷變化的生產(chǎn)需求。井下監(jiān)控分站設計中的人工智能應用,主要體現(xiàn)在智能診斷和預測維護方面。根據(jù)采集的數(shù)據(jù),結(jié)合機器學習算法,監(jiān)控分站能夠?qū)ζн\行狀態(tài)進行實時分析,預測潛在的故障并提前提出維護建議,提高皮帶輸送系統(tǒng)的運行效率,顯著降低意外停機的風險。
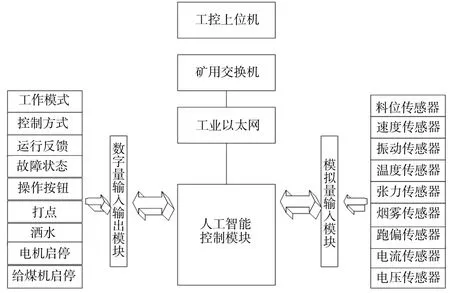
圖1 皮帶輸送機監(jiān)控分站結(jié)構(gòu)示意圖
1.1.2 監(jiān)測傳感器
監(jiān)測傳感器作為數(shù)據(jù)采集的基本單元,其性能直接影響到整個系統(tǒng)的準確性和可靠性。在這部分內(nèi)容中,將深入探討監(jiān)測傳感器的類型、特性、工作原理及其在智能化皮帶輸送系統(tǒng)中的應用。監(jiān)測傳感器的選擇和配置需基于煤礦皮帶輸送系統(tǒng)的具體要求和環(huán)境條件。考慮到煤礦環(huán)境的特殊性,如高塵埃、濕度、振動和潛在的可燃氣體,傳感器需具備高度的防護等級、抗干擾能力和長期穩(wěn)定性。此外,不同類型的傳感器,如溫度傳感器、壓力傳感器、速度傳感器以及負載傳感器,需要根據(jù)其監(jiān)測目標和精度要求進行精心選擇和配置。
1.1.3 視頻監(jiān)控
視頻監(jiān)控系統(tǒng)的設計旨在實現(xiàn)對煤礦作業(yè)區(qū)域的全面視覺監(jiān)控,以便及時檢測并應對可能的安全隱患或效率損失問題。該系統(tǒng)的核心是高分辨率攝像頭、先進的圖像處理硬件以及與之配套的分析軟件。這些攝像頭能夠捕捉到井下環(huán)境的詳細視覺信息,包括設備運行狀態(tài)、作業(yè)人員動態(tài)和環(huán)境條件等。圖像處理硬件需具備高速處理能力,以支持來自多個攝像頭的視頻流的實時分析[3]。此外,配套的分析軟件則應用先進的圖像識別技術,如深度學習和模式識別算法,以自動檢測視頻中的異常模式,如設備故障、安全危險或非標準操作程序。視頻監(jiān)控系統(tǒng)的設計還須考慮井下環(huán)境的特殊性,包括高濕度、塵埃、震動和潛在的易燃氣體環(huán)境。因此,攝像頭和相關硬件設備應具有防爆、防塵、防水和抗震動的特性。同時,由于井下環(huán)境的光照條件可能較差,攝像頭需要具備良好的低光性能,甚至紅外或熱成像功能。
1.2 軟件結(jié)構(gòu)設計與實現(xiàn)
1.2.1 控制主程序
控制主程序不僅需要處理來自傳感器的數(shù)據(jù),還要實時調(diào)節(jié)系統(tǒng)的運行狀態(tài),同時確保系統(tǒng)的最優(yōu)性和穩(wěn)定性。為了深入闡述這一點,本段將引入一個基于卡爾曼濾波的實時監(jiān)測算法,并使用相關公式來展現(xiàn)其在控制主程序中的應用。同時,軟件結(jié)構(gòu)的設計重點在于集成人工智能算法,以及建立一個健壯的軟件框架,支持復雜數(shù)據(jù)處理、決策制定和系統(tǒng)控制。
控制主程序的核心是實時數(shù)據(jù)處理和決策制定。考慮到煤礦皮帶輸送系統(tǒng)中數(shù)據(jù)的不確定性和動態(tài)變化性,卡爾曼濾波算法是一個理想的選擇,借助使用機器學習算法,如深度學習神經(jīng)網(wǎng)絡,用于數(shù)據(jù)分析和模式識別,實現(xiàn)預測維護算法,通過分析歷史數(shù)據(jù)和實時數(shù)據(jù),預測系統(tǒng)可能的故障和維護需求,有效處理含有噪聲的數(shù)據(jù)并提供準確的估計[4]。在實現(xiàn)卡爾曼濾波算法時,首先定義系統(tǒng)狀態(tài)方程和測量方程,如下:
其中,xk是時間步k的系統(tǒng)狀態(tài),A是狀態(tài)轉(zhuǎn)移矩陣,B是控制輸入矩陣,uk-1是控制輸入,wk-1是過程噪聲,zk是觀測值,H是觀測矩陣,vk是觀測噪聲。
接下來,實現(xiàn)卡爾曼濾波的關鍵步驟包括狀態(tài)預測和更新。狀態(tài)預測公式如下:
狀態(tài)更新公式如下:
其中,Kk是卡爾曼增益,R是觀測噪聲協(xié)方差矩陣,是更新后的狀態(tài)估計,Pk|k-1是更新后的估計誤差協(xié)方差。
根據(jù)這種方法,控制主程序能夠?qū)崟r地處理和分析從煤礦皮帶輸送系統(tǒng)的各傳感器收集到的數(shù)據(jù)。卡爾曼濾波算法不僅提供了對系統(tǒng)狀態(tài)的最佳估計,還能夠適應環(huán)境中的變化和不確定性,從而使控制主程序能夠做出更加準確和有效的決策。控制主程序還需要考慮到數(shù)據(jù)的安全性和完整性,確保所有操作在規(guī)定的安全參數(shù)內(nèi)進行。程序還需具備良好的用戶界面,以便操作人員能夠輕松地監(jiān)控系統(tǒng)狀態(tài)并作出調(diào)整。
1.2.2 運行速度控制程序
這一部分將重點介紹一種基于模糊邏輯控制器的算法,該算法用于實時調(diào)節(jié)皮帶運輸系統(tǒng)的運行速度,以確保運輸效率和安全性。為了深入闡釋這一算法,將使用相關公式來展示其在控制程序中的具體應用。
模糊邏輯控制器的設計基于模糊邏輯原理,其核心思想是模擬人類的決策過程,以處理不確定性和模糊性信息。在實現(xiàn)模糊邏輯控制器時,首先定義輸入變量和輸出變量[5]。假設輸入變量為皮帶負載量L和運行環(huán)境因素E,輸出變量為皮帶運行速度V。接下來定義模糊集和隸屬度函數(shù)。例如,對于皮帶負載量L,可以定義三個模糊集:“低”“中”“高”,并為它們分別定義隸屬度函數(shù)。
接下來是模糊規(guī)則的制定,將AI 模塊與現(xiàn)有的控制系統(tǒng)集成,確保數(shù)據(jù)和控制流的順暢。例如,一個簡單的規(guī)則可以是:“如果負載量L是高的,且環(huán)境因素E是不利的,則皮帶運行速度V應該是低的。”這些規(guī)則反映了運行速度與負載量和環(huán)境因素之間的關系
模糊推理過程如下:
模糊化輸入:將實際輸入值轉(zhuǎn)換為模糊值。例如,對于給定的負載量L,計算其隸屬于各模糊集的程度:
應用模糊規(guī)則:根據(jù)模糊化的輸入和模糊規(guī)則計算模糊輸出。例如,根據(jù)上述規(guī)則,皮帶運行速度的模糊輸出V的隸屬度可以表示為:
清晰化輸出:將模糊輸出轉(zhuǎn)換為實際的控制量。這通常根據(jù)去模糊化過程實現(xiàn),例如使用質(zhì)心法計算實際的運行速度:
根據(jù)這種方式,運行速度控制程序能夠?qū)崟r地調(diào)整皮帶輸送系統(tǒng)的速度,以適應不同的運行條件和需求。模糊邏輯控制器提供了一種有效的方法來處理系統(tǒng)中的不確定性和模糊性,從而使控制程序能夠在各種復雜環(huán)境下做出準確和靈活的決策。
運行速度控制程序還需要考慮數(shù)據(jù)的安全性和完整性,確保所有操作在規(guī)定的安全參數(shù)內(nèi)進行。程序還需具備良好的用戶界面,以便操作人員能夠輕松地監(jiān)控系統(tǒng)狀態(tài)并作出調(diào)整。
2 系統(tǒng)功能驗證
為了在煤礦皮帶輸送系統(tǒng)中驗證人工智能的應用,本研究的實驗計劃融合了傳統(tǒng)的系統(tǒng)測試方法和先進的人工智能技術。在設備選擇時,選擇煤礦皮帶輸送系統(tǒng)模型,配置高性能傳感器組件(溫度、壓力、速度、負載傳感器),設置視頻監(jiān)控設備,模擬煤礦環(huán)境(溫度、濕度、灰塵水平),在系統(tǒng)中集成預先訓練的人工智能模型。這些模型可能基于機器學習算法,如神經(jīng)網(wǎng)絡或決策樹,用于識別和預測系統(tǒng)的異常行為,確保人工智能模型能處理來自傳感器的實時數(shù)據(jù),并做出快速響應。針對數(shù)據(jù)收集與分析,每分鐘自動收集溫度、壓力、速度、負載等數(shù)據(jù),人工智能算法分析這些數(shù)據(jù),識別異常模式或趨勢,通過模擬不同的工作條件(如不同的負載、速度、環(huán)境變化)測試系統(tǒng)的響應,用AI 算法分析在不同條件下的系統(tǒng)表現(xiàn),比如負載變化對速度和壓力的影響,對比五組實驗數(shù)據(jù),分別對溫度、壓力、速度、負載、準確性等數(shù)據(jù)進行收集(表1),檢驗數(shù)據(jù)準確性和一致性,根據(jù)測試結(jié)果和AI 分析,調(diào)整系統(tǒng)配置或算法參數(shù)并優(yōu)化算法,以提高準確性和響應速度。根據(jù)分析數(shù)據(jù)顯示,在不同時間點,這些參數(shù)的值有所變化,反映出系統(tǒng)在各種條件下的性能表現(xiàn),這些數(shù)據(jù)對于評估系統(tǒng)的整體性能和確定進一步優(yōu)化的方向至關重要。
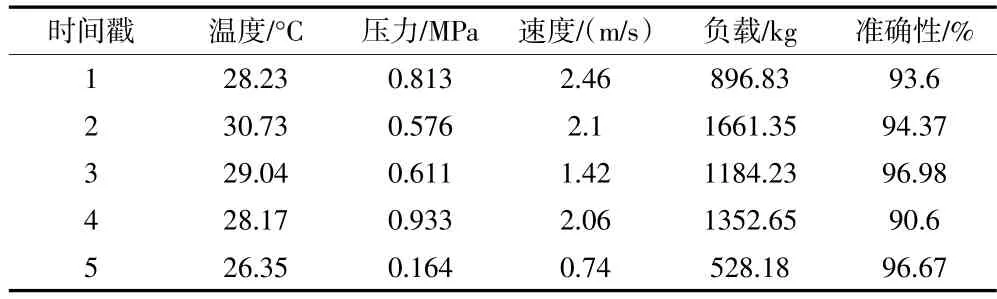
表1 系統(tǒng)功能驗證數(shù)據(jù)
3 結(jié)語
煤礦皮帶輸送系統(tǒng)的設計需要考慮電機驅(qū)動、動力分配和電路控制等關鍵技術。而自動控制領域的知識則為系統(tǒng)的穩(wěn)定運行和故障診斷提供理論支撐。信息處理技術,特別是人工智能的引入,為系統(tǒng)的數(shù)據(jù)分析和決策提供了新的思路。根據(jù)集成先進的傳感器技術和監(jiān)控系統(tǒng),可以實現(xiàn)對皮帶運行狀態(tài)的實時監(jiān)控,及時發(fā)現(xiàn)和處理潛在的安全隱患。此外,人工智能算法的應用還能優(yōu)化系統(tǒng)的能源管理和運行策略,降低能耗,提高經(jīng)濟效益,旨在為煤炭工業(yè)的現(xiàn)代化進程提供科學的理論指導和實踐方案,對推動煤礦安全生產(chǎn)和節(jié)能減排有重要作用。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
商界(2019年12期)2019-01-03 06:59:05
IT經(jīng)理世界(2018年20期)2018-10-24 02:38:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
工業(yè)設計(2016年4期)2016-05-04 04:00:23
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:55:34