基于遠(yuǎn)程非車載充電機(jī)的現(xiàn)場校準(zhǔn)方法研究
2024-05-07 02:44:48楊永建尹文慶李廣山
自動(dòng)化儀表 2024年4期
關(guān)鍵詞:信息
李 寧,楊永建,尹文慶,李廣山,于 靜
(國網(wǎng)新疆電力有限公司營銷服務(wù)中心(資金集約中心、計(jì)量中心),新疆 烏魯木齊 830011)
0 引 言
隨著汽車領(lǐng)域的飛速發(fā)展,直流充電技術(shù)的應(yīng)用越來越廣泛。其中,非車載充電機(jī)檢測至關(guān)重要。然而,現(xiàn)有技術(shù)存在以下缺陷。
首先,現(xiàn)有技術(shù)多采用現(xiàn)場校驗(yàn)的方法檢測非車載充電機(jī)。這是一種一機(jī)一測的原始檢測方案。該方案雖然能夠?qū)崿F(xiàn)數(shù)據(jù)信息的監(jiān)測,但效率低下,檢測過程需要耗費(fèi)大量的人力[1]。
其次,現(xiàn)有技術(shù)對(duì)非車載充電機(jī)進(jìn)行電能計(jì)量時(shí),采用的計(jì)量方法精度低。現(xiàn)有技術(shù)大部分采用0.2級(jí)以上的電源及其他配件參數(shù)[2],整體監(jiān)測誤差高。
最后,現(xiàn)有技術(shù)采用RS-232、RS-485等有線測量方法[3],現(xiàn)場布局混亂、遠(yuǎn)程監(jiān)測能力差。
針對(duì)上述不足,本文對(duì)高精度非車載充電機(jī)現(xiàn)場進(jìn)行遠(yuǎn)程校驗(yàn),提出一種相關(guān)設(shè)計(jì)人員即使不在現(xiàn)場也能實(shí)現(xiàn)高精度非車載充電機(jī)現(xiàn)場無線監(jiān)控與校準(zhǔn)的方法。
1 現(xiàn)場校準(zhǔn)原理
現(xiàn)場校準(zhǔn)架構(gòu)如圖1所示。
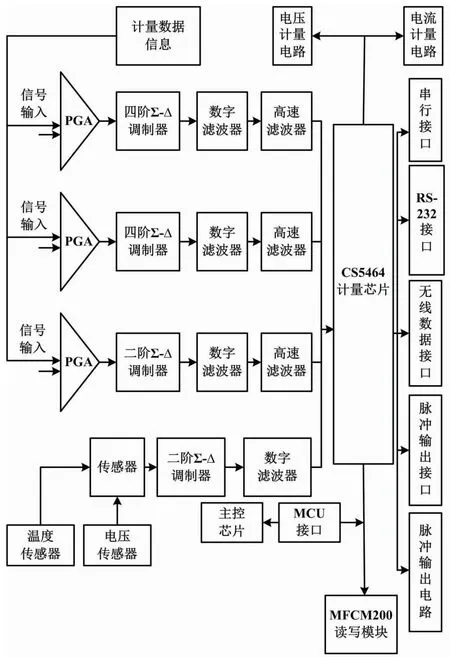
圖1 現(xiàn)場校準(zhǔn)架構(gòu)示意圖
本文設(shè)計(jì)的基于遠(yuǎn)程非車載充電機(jī)現(xiàn)場校準(zhǔn)方法的校準(zhǔn)原理如下。對(duì)于主核心芯片,本文設(shè)計(jì)了CS5464非車載充電機(jī)電能計(jì)量芯片。通過該芯片,可以實(shí)現(xiàn)非車載充電機(jī)的計(jì)量、檢測與控制。硬件結(jié)構(gòu)包括電壓計(jì)量電路、電流計(jì)量電路、濾波器、調(diào)制器、基于MSP430FG4619核心芯片的微控制單元(microcontroller unit,MCU)內(nèi)核等[4]。在電路設(shè)計(jì)中,本文引入了MFCM200讀寫模塊、MCU接口等。通過MFCM200模塊,可以實(shí)現(xiàn)MFCM200與集成電路(integrated circuit,IC)卡控制部件的連接等功能。通過CS5464芯片[5],能夠輸出非車載充電機(jī)電能計(jì)量的瞬態(tài)功率等。電路包括放大器電路、調(diào)制電路、數(shù)字濾波電路和數(shù)據(jù)通信電路等[6]。
為了提高現(xiàn)場校準(zhǔn)能力,本文引入了16位MSP430FG4619的MCU內(nèi)核計(jì)算電路,以實(shí)現(xiàn)數(shù)據(jù)信息的計(jì)算與處理。硬件模塊設(shè)計(jì)了運(yùn)算器電路、控制器電路、存儲(chǔ)器電路、輸入輸出設(shè)備等[7-8]。相關(guān)設(shè)計(jì)人員可以借助計(jì)算機(jī)軟件對(duì)電源模塊輸出的參數(shù)進(jìn)行設(shè)置,比如電壓和電流的幅值、波形、頻率和相位等。這些參數(shù)能夠多角度、多方面反映非車載充電機(jī)工作參數(shù)的數(shù)據(jù)信息。其中,插針網(wǎng)格陣列(pin grid array,PGA)封裝在本文方法中發(fā)揮著至關(guān)重要的作用。
為了提高數(shù)據(jù)的監(jiān)測能力,需要對(duì)充電機(jī)直流電流以及直流電壓進(jìn)行采樣、測量和計(jì)算。數(shù)據(jù)信息包括電流、電壓等。在實(shí)現(xiàn)數(shù)據(jù)信息采樣時(shí),通過這些參數(shù)能夠全面反映現(xiàn)場校準(zhǔn)情況。在具體工作過程中,利用瞬時(shí)功率計(jì)算式對(duì)非車載充電機(jī)的高精度信息進(jìn)行提取和計(jì)算時(shí),本文設(shè)計(jì)了高精度電源模塊。該模塊輸出功率精度較高,約為5×10-5,可實(shí)現(xiàn)數(shù)據(jù)信息的周期性計(jì)量。系統(tǒng)設(shè)置的額定電壓分別為10 kV和35 kV。工作過程中輸出的工作電流為1 000 A[9]。
在對(duì)比測量時(shí),本文采用了高精度標(biāo)準(zhǔn)電能表。該電能表的精度為0.01級(jí)、標(biāo)準(zhǔn)參數(shù)功率準(zhǔn)確度優(yōu)于0.05%。信號(hào)放大電路設(shè)計(jì)時(shí),其計(jì)量參數(shù)處于1 000∶1內(nèi)的動(dòng)態(tài)范圍,信號(hào)輸出線性度可以達(dá)到±0.1%的精度。通過上述方法可實(shí)現(xiàn)現(xiàn)場校準(zhǔn)的高精度計(jì)量[10]。
在計(jì)量非車載充電機(jī)時(shí),為了提高電能計(jì)量能力,本文還對(duì)其他參數(shù)(如瞬時(shí)電壓、電流、功率以及電能表輸出的電壓、電流、功率有效值等)進(jìn)行了計(jì)量和研究。在數(shù)據(jù)信息存儲(chǔ)時(shí),本文設(shè)置了E2PROM模塊。該模塊具有三線數(shù)字串行接口。E2PROM模塊還設(shè)置了實(shí)現(xiàn)非車載充電機(jī)現(xiàn)場計(jì)量數(shù)據(jù)信息的監(jiān)控模塊,提高了非車載充電機(jī)現(xiàn)場計(jì)量能力[11]。在現(xiàn)場校準(zhǔn)模塊的設(shè)計(jì)過程中,本文在校準(zhǔn)裝置上設(shè)置輸入/輸出引腳,比如:XOUT、XIN晶振腳;SCLK串行通信時(shí)鐘信號(hào)腳;SDO、SDI輸出輸入腳;VIN+、VIN-電壓通道的輸入引腳等[12]。其中,瞬態(tài)電流為:
(1)
式中:IRMS為瞬態(tài)電流;N為測量次數(shù);IN為電流。
瞬態(tài)電壓為:
(2)
式中:URMS為瞬態(tài)電壓;UN為電壓。
瞬態(tài)功率為:
PRMS=IRMS×URMS
(3)
式中:PRMS為瞬態(tài)功率。
在計(jì)算交流電能數(shù)據(jù)采樣時(shí),本文通過PFMON比較器實(shí)現(xiàn)非車載充電機(jī)數(shù)據(jù)信息的計(jì)量與診斷。通過將URMS和IRMS相乘,可以輸出PRMS的值[13]。
S=URMS×IRMS
(4)
式中:S為有功功率。
通過上述計(jì)量后,本文對(duì)輸出的數(shù)據(jù)信息值與標(biāo)準(zhǔn)值進(jìn)行對(duì)比。現(xiàn)場誤差為:
(5)
式中:δ為誤差率,%;η為測量值;μ為標(biāo)準(zhǔn)值。
γ=γe+γh+γd
(6)
式中:γ為高精度非車載充電機(jī)綜合總誤差;γe為功率誤差;γh為互感器的合成誤差;γd為二次降壓誤差。
2 現(xiàn)場校準(zhǔn)監(jiān)控方案設(shè)計(jì)
為了提高遠(yuǎn)程校驗(yàn)?zāi)芰?遠(yuǎn)程數(shù)據(jù)信息監(jiān)控采用多通道的數(shù)字視頻采集設(shè)備。通過遠(yuǎn)程無線通信接口,可以實(shí)現(xiàn)現(xiàn)場校準(zhǔn)的遠(yuǎn)距離監(jiān)控[14]。遠(yuǎn)程數(shù)據(jù)監(jiān)控終端如圖2所示。

圖2 遠(yuǎn)程數(shù)據(jù)監(jiān)控終端示意圖
為了提高非車載充電機(jī)現(xiàn)場監(jiān)控能力,本文通過多路視頻的實(shí)時(shí)采集和高速壓縮實(shí)現(xiàn)編碼處理。現(xiàn)場高精度非車載監(jiān)控采用的主控芯片為TMS320DM8168芯片。通過該芯片,可控制高精度非車載充電機(jī)的監(jiān)測現(xiàn)狀。輸出的視頻數(shù)據(jù)一方面通過本地存儲(chǔ)模塊實(shí)現(xiàn)信息存儲(chǔ),另一方面通過遠(yuǎn)程無線數(shù)據(jù)通信接口實(shí)現(xiàn)與遠(yuǎn)程控制終端的交互。
非車載充電機(jī)數(shù)據(jù)信息在本地硬盤存儲(chǔ)。遠(yuǎn)程數(shù)據(jù)監(jiān)控終端具備無線通信功能。通過與本地具有無線數(shù)據(jù)通信接口的平板、智能手機(jī)或者智能終端通信,可以實(shí)現(xiàn)本地?cái)?shù)據(jù)信息交互。遠(yuǎn)程數(shù)據(jù)監(jiān)控終端包括控制模塊、ARM子控制系統(tǒng)、數(shù)據(jù)存儲(chǔ)處理控制系統(tǒng)、計(jì)量數(shù)字信號(hào)處理(digital signal processing,DSP)系統(tǒng)等多種數(shù)據(jù)控制、計(jì)量模塊[15]。ARM子控制系統(tǒng)不僅能夠?qū)崿F(xiàn)現(xiàn)場數(shù)據(jù)信息的采集、控制,還能夠?qū)崿F(xiàn)對(duì)非車載充電機(jī)校核現(xiàn)場的監(jiān)控和遠(yuǎn)程數(shù)據(jù)傳遞。DSP子控制系統(tǒng)負(fù)責(zé)對(duì)采集到的視頻數(shù)據(jù)的監(jiān)視與管理。TVP5158芯片可實(shí)現(xiàn)非車載充電機(jī)多角度數(shù)據(jù)信息采集,并將采集到的視頻數(shù)據(jù)發(fā)送給主控模塊。主控模塊將采集到的數(shù)據(jù)信息發(fā)送到遠(yuǎn)程數(shù)據(jù)信息中心,以提高現(xiàn)場校核能力。
3 校準(zhǔn)精度提高方案設(shè)計(jì)
本文采用匹配算法實(shí)現(xiàn)非車載充電機(jī)遠(yuǎn)程在線校準(zhǔn)與監(jiān)控。本文假設(shè)校準(zhǔn)誤差為P、實(shí)際檢測值為Q,將數(shù)據(jù)信息轉(zhuǎn)換到極坐標(biāo)上進(jìn)行處理。本文假設(shè)存在離散點(diǎn)p、q,通過離散函數(shù)將所有的數(shù)據(jù)信息轉(zhuǎn)換到空間坐標(biāo)上進(jìn)行處理,則存在以下數(shù)據(jù)函數(shù):
(7)
式中:θ為空間極坐標(biāo)上的數(shù)據(jù)夾角;(p,r)為空間極坐標(biāo)上任意一點(diǎn);(q,r)為故障數(shù)據(jù)在空間極坐標(biāo)上的點(diǎn);Psin1為空間極坐標(biāo)上誤差數(shù)據(jù)的正弦;Qsin2為空間極坐標(biāo)上故障數(shù)據(jù)的正弦。
本文設(shè)f(pti)為非車載整機(jī)誤差變化規(guī)律函數(shù),則對(duì)上述正弦求解,有:
(8)

通過對(duì)比,計(jì)算出誤差函數(shù)為:
(9)
式中:O(pti)為空間極坐標(biāo)上初始誤差函數(shù)變化關(guān)系。
通過遠(yuǎn)程數(shù)據(jù)采集到的非車載充電機(jī)整體誤差函數(shù)表示為:
(10)

在進(jìn)行遠(yuǎn)程校驗(yàn)時(shí),可能會(huì)受到各種條件數(shù)據(jù)信息的影響。存在的限制條件為:
(11)
式中:f(qtj)為非車載整機(jī)故障信息在整個(gè)遠(yuǎn)程校驗(yàn)過程中的規(guī)律;ε為非車載整機(jī)遠(yuǎn)程在線校驗(yàn)過程中的數(shù)據(jù)誤差和故障數(shù)據(jù)變化標(biāo)準(zhǔn)范圍。
在設(shè)定的標(biāo)準(zhǔn)中,本文假設(shè)非車載整機(jī)誤差校驗(yàn)標(biāo)準(zhǔn)為ε2=ε3=ε4=0.01。
根據(jù)模板匹配方法,本文將檢測到的數(shù)據(jù)信息與標(biāo)準(zhǔn)信息進(jìn)行對(duì)比。對(duì)比后的數(shù)據(jù)集合為:
(12)

在進(jìn)行模板匹配校驗(yàn)過程中,存在以下關(guān)系式:
(13)
式中:dist()為模板匹配校驗(yàn)過程中的數(shù)據(jù)約束函數(shù)。
本文故障和誤差劃定范圍標(biāo)準(zhǔn)為ε5=0.02。
假設(shè)本文采集的誤差和故障點(diǎn)云數(shù)據(jù)組滿足約束條件,劃定此時(shí)整體范圍標(biāo)準(zhǔn)ε6=0.9,則計(jì)算得到的誤差數(shù)據(jù)總量應(yīng)滿足:
Ni≥ε6×N′
(14)
式中:Ni為滿足模板匹配校驗(yàn)過程中的非車載整機(jī)校驗(yàn)誤差約束條件參數(shù)數(shù)據(jù)信息;N′為非車載整機(jī)整個(gè)校驗(yàn)過程的遠(yuǎn)程數(shù)據(jù)總量。
非車載整機(jī)校驗(yàn)誤差函數(shù)為:
(15)
式中:ntd為非車載整機(jī)校驗(yàn)過程中的遠(yuǎn)程數(shù)據(jù)信息通道數(shù);qi為非車載整機(jī)校驗(yàn)過程中遠(yuǎn)程校驗(yàn)采集到的數(shù)據(jù)信息;RPk為非車載整機(jī)校驗(yàn)過程中誤差分析輸出數(shù)據(jù)信息;T為非車載整機(jī)校驗(yàn)過程中誤差計(jì)算需要的時(shí)間。
通過與模板匹配后,誤差函數(shù)為:
(16)
式中:x為非車載整機(jī)校驗(yàn)過程中關(guān)系比較臨近的誤差參數(shù),如電流;y為非車載整機(jī)校驗(yàn)過程中關(guān)系比較臨近的誤差參數(shù),如電壓;z為非車載整機(jī)校驗(yàn)過程中關(guān)系比較臨近的誤差參數(shù),如功率;m為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心的數(shù)據(jù)量。
模板配對(duì)數(shù)據(jù)輸出函數(shù)為:
(17)
式中:qsi為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心的故障數(shù)據(jù)配對(duì)數(shù)據(jù)信息;Rs+1為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心實(shí)現(xiàn)故障分析時(shí)的精度;psi為整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心受到外界數(shù)據(jù)信息影響時(shí)的非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心后的總體數(shù)據(jù)信息誤差傳輸結(jié)果;ts+1為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心的故障數(shù)據(jù)信息。
Ps+1=Rs+1Ps+Ts+1
(18)
式中:Ps為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心的所有模板匹配誤差數(shù)據(jù)值;Ts+1為非車載整機(jī)校驗(yàn)過程中,整機(jī)故障數(shù)據(jù)傳遞到遠(yuǎn)程監(jiān)控中心的消耗時(shí)間。
通過上述方法,本文實(shí)現(xiàn)了非車載整機(jī)校驗(yàn)的誤差分析。
4 試驗(yàn)結(jié)果及分析
試驗(yàn)架構(gòu)如圖3所示。

圖3 試驗(yàn)架構(gòu)示意圖
試驗(yàn)的硬件條件為Intel i9 9600KF配置計(jì)算機(jī)、256 GB內(nèi)存容量。現(xiàn)場試驗(yàn)環(huán)境設(shè)置中,非車載充電機(jī)采集精度大于85%。試驗(yàn)時(shí)采用的中央處理器(central processing unit,CPU)為Inter i8以上處理器。試驗(yàn)結(jié)果通過Matlab實(shí)現(xiàn)曲線呈現(xiàn)[16]。遠(yuǎn)程控制高精度非車載充電機(jī)使用的環(huán)境如下:智能電能表為DTZ545;CPU為Intel i8 9600KF;計(jì)算機(jī)的硬件配置為8核CPU,64位處理器,128 G內(nèi)存;仿真時(shí)采用Matlab 2019。
經(jīng)過8 h的試驗(yàn),為了數(shù)據(jù)分析的便利,本文抽取一部分?jǐn)?shù)據(jù)信息作為分析對(duì)象。本文通過方案1和方案2進(jìn)行對(duì)比分析。其中:方案1為常規(guī)技術(shù)中采用檢測設(shè)備進(jìn)行現(xiàn)場校驗(yàn)的方法;方案2為電動(dòng)汽車非車載充電機(jī)實(shí)現(xiàn)自動(dòng)檢測系統(tǒng)測量的方法。
假設(shè)測量次數(shù)(重復(fù)測量次數(shù))均為10次以上,則通過多次測量后,非車載充電機(jī)標(biāo)準(zhǔn)差估計(jì)值S′為:
(19)

三種方案測量數(shù)據(jù)記錄如表1所示。

表1 三種方案測量數(shù)據(jù)記錄表
非車載充電機(jī)計(jì)量精度如圖4所示。

圖4 非車載充電機(jī)計(jì)量精度示意圖
由圖4可知,隨著非車載充電機(jī)的數(shù)量增多,計(jì)量誤差也在逐步增加。方案1和方案2的檢定誤差隨著時(shí)間和非車載充電機(jī)數(shù)量的增多而逐步增加。本文方案誤差明顯低于方案1和方案2。
5 結(jié)論
針對(duì)現(xiàn)有技術(shù)中高精度非車載充電機(jī)現(xiàn)場校準(zhǔn)存在誤差大、校驗(yàn)不方便的問題,本文設(shè)計(jì)了基于遠(yuǎn)程非車載充電機(jī)的現(xiàn)場校準(zhǔn)方法,提高了非車載充電機(jī)計(jì)量效率和控制能力。通過MSP430FG4619核心MCU芯片,實(shí)現(xiàn)了非車載充電機(jī)的電能計(jì)量。遠(yuǎn)程數(shù)據(jù)信息監(jiān)控技術(shù)的多通道數(shù)字視頻采集設(shè)備,通過遠(yuǎn)程無線通信接口實(shí)現(xiàn)現(xiàn)場校準(zhǔn)的遠(yuǎn)距離監(jiān)控。通過匹配算法,對(duì)非車載充電機(jī)進(jìn)行遠(yuǎn)程在線校準(zhǔn)與監(jiān)控,提高了非車載充電機(jī)的在線評(píng)估能力。本文仍然存在一些不足,比如檢測過程中在實(shí)現(xiàn)一定精度下的時(shí)間控制、測量過程中的粗大誤差剔除等方面仍需進(jìn)行進(jìn)一步的探索和研究。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
