輪式果園多功能自主導航作業平臺設計
2024-05-22 18:44:10褚陽陽汪冰清薛金林馬拯胞
中國農機化學報 2024年2期
褚陽陽 汪冰清 薛金林 馬拯胞

摘要:為實現果園作業機械的多功能應用,設計一款具備割草、噴藥、搬運等功能的輪式果園多功能自主導航作業平臺。根據作業需求對多功能平臺進行總體設計,平臺包括動力系統、行走系統、導航系統、控制系統、作業裝置等。根據搬運需求計算確定整機驅動電機選型;對割刀進行運動和動力學分析,根據切削范圍和穩定需求,計算確定割刀電機和電動推桿的型號;根據流體力學知識,計算確定滿足噴藥噴幅的藥泵型號,并對其他關鍵部件進行計算選型。對樣機進行最小轉彎半徑、割草性能、噴霧性能等基本性能試驗。試驗結果表明,所設計的平臺最小轉彎半徑為120.75 cm,滿足果園行間地頭良好的通過性要求;割刀轉速和高度可調,留茬高度可控制在5 cm以內,割草作業覆蓋率在91.25%以上;噴藥泵可根據車速、樹形等進行壓力調節,噴霧量均勻性變異系數在8.01%以內,保證噴霧均勻的同時減少農藥浪費。
關鍵詞:果園機械;多功能作業;輪式平臺;自主導航
中圖分類號:S224.4: S229+.1
文獻標識碼:A
文章編號:20955553 (2024) 02018007
收稿日期:2023年1月16日 ?修回日期:2023年4月23日
基金項目:江蘇省農機裝備與技術示范推廣項目(NJ2021—38);江蘇現代農業產業技術體系建設項目(JAST[2022]483);南京市現代農機裝備與技術創新示范項目(NJ[2022]07)
第一作者:褚陽陽,男,1996年生,山東新泰人,碩士研究生;研究方向為農機裝置智能化。Email: chuyy@njau.edu.cn
通訊作者:汪冰清,女,1973年生,江蘇響水人,高級工程師;研究方向為農機信息化與智能化。Email: Wangbq209@163.com
Design of a wheeled multifunction autonomous operation platform in orchard
Chu Yangyang1, Wang Bingqing2, Xue Jinlin1, Ma Zhengbao3
(1. College of Engineering, Nanjing Agricultural University, Nanjing, 210031, China; 2. Jiangsu Agricultural
Machinery Information Center, Nanjing, 210017, China; 3. Jiangsu Agricultural Machinery Development and
Application Center, Nanjing, 210017, China)
Abstract:
In order to realize the multifunctional application of orchard operation machinery, a wheeled orchard multifunctional autonomous navigation operation platform was designe with functions such as mowing, spraying and carrying was designed. The overall design of the multifunctional platform is carried out according to the operation requirements. The platform includes a power system, a walking system, a navigation system, a control system and operating devices. The selection of drive motor of the whole machine was determined according to the handling demand. The motion and dynamics of cutter were analyzed, and the model of cutter motor and electric push rod was determined according to cutting range and stability demand. According to the knowledge of fluid mechanics, the model of the pump that meets the spray width was determined by calculation, and other key components were selected by calculation. The prototype was tested on the minimum turning radius, grass cutting performance and spraying performance. The results showed that the minimum turning radius of the platform we designed is 120.75 cm, which meted the requirements of good passability between rows of orchard. The speed and height of cutter can be adjusted, the stubble height can be controlled within 5 cm, and the coverage rate of mowing operation is more than 91.25%. The spray pump can adjust the pressure according to the speed and tree shape, and the variation coefficient of spray uniformity is within 8.01%, which ensures the uniformity of spray and reduces the waste of pesticides.
Keywords:
orchard machinery; multifunctional operation; wheeled platform; autonomous navigation
0 引言
我國是水果生產和消費大國,果樹種植面積及水果年產量都位于世界前列[1]。近年來,根據果園管理建設需要以及降低果園生產成本需求,果園機械正朝著通用化、智能化方向發展[2],發展多功能果園生產管理機械是必然趨勢。
歐美等國家早在20世紀60年代后已經開始果園多功能作業平臺的研究[34],英國Genie公司和澳大利亞CRENDON公司的升降采摘平臺、日本筑水農機運輸管理機等,這些平臺或管理機操縱性和穩定性較好,能夠滿足果園采摘方面的平臺升降和果實運輸等需求,法國JTC viticulture公司葡萄園管理機能夠實現旋耕、施肥、除草、噴藥、果枝修剪等功能[5]。我國在這方面研究起步較晚,2007年,新疆機械研究院研發了我國第一臺果園多功能作業機,該平臺可以完成運輸、剪枝、采摘登高以及噴藥等工作[6];之后,諸多學者和公司根據我國果園特點不斷進行多功能平臺研究和改進,張亞等[7]設計的果園多功能管理平臺能夠完成開溝、施肥、施藥作業,并且設計監控系統,可順利實現果園作業監控與管理;洛陽瑪斯特研發的履帶自走式多功能管理機,該機除運輸外還可以進行旋耕、植保、割草、開溝、施肥、枝條粉碎等工作[8];楊濤等[9]設計一款適宜丘陵地帶的微型電動多功能行駛平臺,基本能夠適應壕溝、坡道等場景。
綜上所述,目前常見的果園多功能作業平臺多種多樣,但是存在機械結構復雜、生產成本高、利用率低等缺點。本文針對果園生產管理需求,設計一款掛接方便、結構簡單、轉向輕便的集割草、搬運、噴藥等功能于一體的果園多功能自主導航作業平臺。
1 整機結構與工作原理
現代標準化高密度果園行距一般在4~5 m,株距1~2 m,樹冠直徑1~2 m,樹高2~3 m,樹干高度0.6 m以上[10],平臺設計應滿足標準化果園行間的自主導航、割草、噴藥、搬運等要求,即噴藥幅寬應在0.6~3 m,最小轉彎半徑小于2 m,果園留草高度控制在10 cm左右[11]。
1.1 整機結構
履帶式果園機械具有良好的地形適應能力、爬坡能力強等,但運行速度相對較低、功耗較大;而輪式果園機械具有速度快、牽引力大、機動性好、可靠性高、噪聲低、對地面損害小等優點[1213]。標準化果園地形平整,輪式作業可以很好地滿足需求。
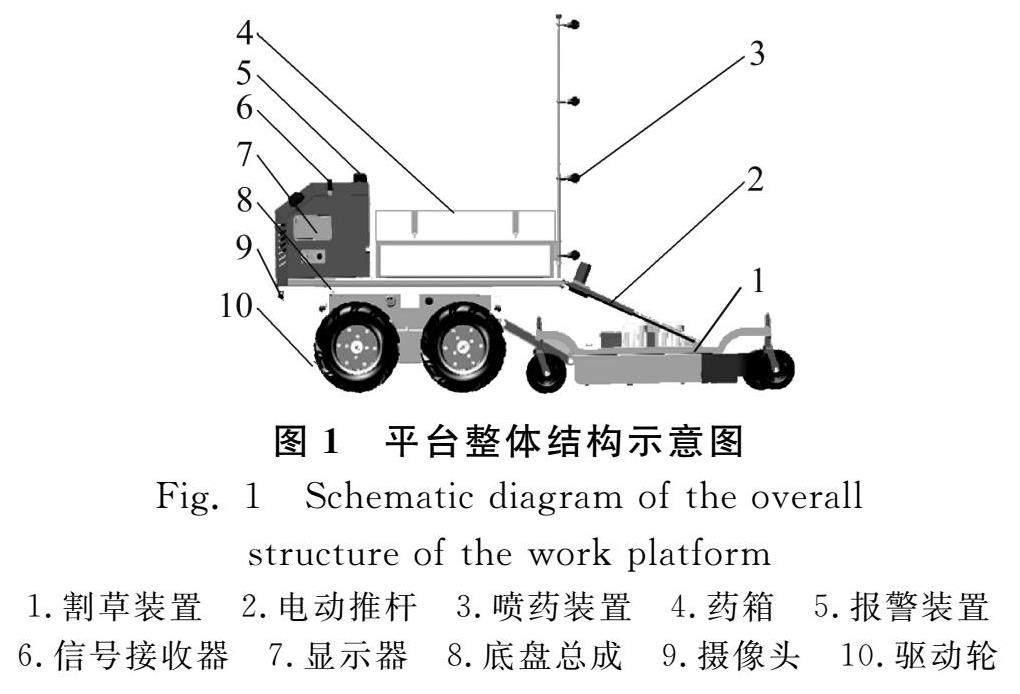
本文所設計作業平臺主要包括行走系統、動力系統、導航系統、控制系統、作業裝置等,結構如圖1所示。整機主要技術參數如表1所示。
1.割草裝置
2.電動推桿
3.噴藥裝置
4.藥箱
5.報警裝置
6.信號接收器
7.顯示器
8.底盤總成
9.攝像頭
10.驅動輪
整機驅動采用蓄電池組,配套動力為:48V-100AH,是平臺的主要動力來源;導航系統采用GPS與和視覺融合,可實現平臺在果園中的自主導航;控制系統是平臺的核心,是整機的大腦;作業裝置包括可拆卸的割草裝置、噴藥裝置、搬運平臺等。分布式電驅動形式傳動鏈短、結構緊湊、傳動效率高,可以很好地簡化底盤的動力與傳動結構[1415];相較于單輪胎,雙輪胎更加穩定,與地面接觸面積更大,承重能力更強,延長輪胎使用壽命,可以很好地減少軸距,結構緊湊,減小轉彎半徑[1617],因此選擇四輪獨立驅動(4 Wheels Independent Drive, 4WID)作為作業平臺的行駛系統,外側最大寬度為0.88 m,最大行駛速度為5 km/h,作用是支承整機全部質量。
1.2 工作原理
整機在遙控裝置的作用下進行工作,GPS和相機可實現平臺的自主導航,相機可以識別果園環境并做出反應。驅動電機的正反轉作用下實現平臺的前進或后退,轉向時,兩側電機輸出不同轉速形成轉速差,平臺在內外輪轉速差的作用下完成轉向動作。噴藥裝置和割草裝置可拆卸,藥箱拆下時,周轉箱等可以放在載物臺完成搬運工作。在懸掛裝置和支撐輪作用下,割草裝置可以保持穩定,割草作業完成后,在電動推桿的作用下,割草裝置提升,平臺可更加平穩地行駛。
2 關鍵裝置設計
2.1 驅動電機選型
相較于燃油驅動,電驅動不需要機械式的傳動部分,導線易彎折,因此電驅動可很好的壓縮空間,減小整機體積及質量;另一方面,電驅動可以很好地做到節約能源,減少廢氣排放[18],因此整機采用電驅動方式。
平臺在果園行駛時,由于運輸時產生的負載較大,當載荷量達到目標值300 kg時,此時電機克服載重所需驅動力
Ft≥μG
(1)
式中:
Ft——車輪驅動力,N;
μ——
輪胎與地面的靜摩擦因數,取μ=0.7;
G——整機滿載質量,N。
此時驅動力應為4 550 N。
當車輛行駛在地面上時,驅動輪驅動力
Ft=ηT0R
(2)
T0=9 550×P0n
(3)
式中:
P0——電機輸出功率,kW;
T0——電機輸出扭矩,N·m;
n——電機轉速,r/min;
R——驅動輪半徑,m;
η——傳動效率,取為0.9。
因此在滿載行駛時,電機的驅動力至少應為7 kW。
為滿足作業平臺行駛和運輸需求,選用的驅動電機輸出扭矩為1 282 N·m,最終選定TKM38B-30-80B14電機,最大輸出功率為7.5 kW,驅動器型號為KYDBL48150-1E。
2.2 割草部件設計
果園內雜草在一定程度上可以起到保水保溫、補充有機養分的作用,考慮到實際生產,果園雜草不完全清除,而是采用割草確保將雜草控制在一定高度內。割草裝置由外殼、割刀、懸掛裝置、支撐輪、電機等組成,如圖2所示。外殼后側板空缺安裝保護罩,內部包含兩個旋割刀,懸掛裝置兩側支撐臂分別與主機鉸接,提升臂直接使用電動推桿與主機鉸接,在電動推桿的作用下,割草部件可以進行提升和下降。旋耕割刀錯位安裝,保證割幅的同時使結構更加緊湊、減小裝置質量,兩個電機獨立驅動,減小機械阻力,保證了作業效率。割刀高度根據割草高度和果園地形需要,可通過調節螺栓對支撐輪進行調節,改善割草效果。
1.保護罩
2.外殼
3.割刀裝置電路總成
4.割刀驅動電機
5.高度調節裝置
6.支承輪
2.2.1 割刀轉速計算
為保證割刀穩定工作,選取割刀刀頭處對割刀進行動力學分析,如圖3所示。
平臺行駛時,在割刀刀頭處,其位移隨其轉速和行駛速度的變化為
x=r(1-cosωt)
y=vt+rsinωt
(4)
式中:
r——割刀割幅半徑,m;
v——平臺行駛速度,m/s;
ω——割刀角速度,rad/s。
對時間t進行微分求出其速度
vx=ωrsinωt
vy=v+ωrcosωt
(5)
對速度進行合成求出刀頭的絕對速度
va=vx2+vy2=ω2r2+v2+2vωrcosωt
(6)
當cosωt最小,即cosωt為-1時,速度最小,此時割刀刀頭切向速度與行進速度共線反向。為保證割刀作業穩定,無支撐的割刀切削線速度應保持在40~80 m/s[19],取平臺以最大速度勻速行駛,v=5 km/h,刀頭處線速度最小處設置為不超過40 m/s。按照切削穩定、保證切削范圍的要求,設計機械在行間行走至少可以覆蓋果園行間距的一半,初步設定割幅范圍600 mm,求出電機轉速應大于1 229 r/min,因此本設計采用的電機轉速有1 500 r/min和2 500 r/min兩個擋位。
2.2.2 電動推桿選型
為選擇合適的電動推桿以保證所掛接裝置的平穩提升,將割草部件簡化為如圖4所示的模型,并對其進行受力分析。由圖4(a)可知,當電動推桿恰好可以提升裝置時,輪1受到地面的力為0,此時作用在割草部件上的力平衡和力矩平衡方程
Tcosα=Fcosθ
N+Fsinθ=Tsinα+G0
Fsinθ·s+Tsinα·L=N(L+l)
(7)
式中:
F——電動推桿對裝置的力,N;
T——支撐臂對裝置的力,N;
N——地面對裝置的支撐力,N;
G0——割草裝置質量,N;
L、s——
電動推桿鉸點、支撐臂鉸點與質心的水平距離,m;
l——
支撐輪地面觸點與裝置前壁的水平距離,m;
α、θ——
提升桿、電動推桿和水平面的夾角,(°)。
(a) 割草裝置剛好抬起
(b) 割草部件完全抬起
求解方程組,電動推桿對裝置的力
F=G0(L+l)(L+l+s)sinθ-lcosθtanα
(8)
由圖4(b)可知,當裝置完全離地且處于平衡狀態,地面對裝置不存在作用力,此時求解得電動推桿對裝置的力
F=G0·cosα0sin(θ0-α0)
(9)
將其外形尺寸代入相關參數,s=l=0.2 m,L=0.6 m,靜止狀態下,α≈35°,θ≈30°,被抬起后,α0≈22°,θ0≈20°。計算得出電動推桿力應在3 332 N以上,為保證其工作穩定,選擇采用LV5000電動推桿,其推力5 000 N,工作電壓為24 V,速度為25 mm/s,行程為300 mm。
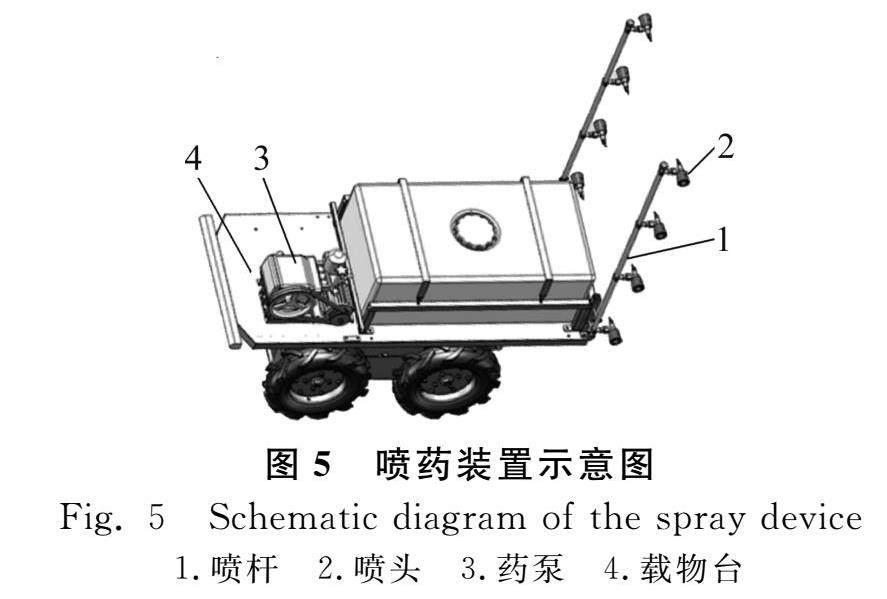
2.3 噴藥裝置設計
噴藥裝置由藥箱、藥泵、電磁閥、噴桿及噴頭組成,如圖5所示。可拆卸藥箱安裝在載物臺上,藥箱內裝有液位傳感器,當液面低于一定程度時會自動報警停止噴藥并記錄工作點位。噴桿位于藥箱后部兩側,每側安裝4個噴頭,噴頭仰角由上至下依次減小,以保證噴霧對樹冠全覆蓋。
1.噴桿
2.噴頭
3.藥泵
4.載物臺
根據伯努利方程,藥液在藥泵出口和噴嘴處的速度、壓力等關系為
p0+ρgh0+12ρv02=∑4i=1pi+ρghi+12ρvi2+Δpw
(10)
式中:
p0、pi——
藥泵出口、噴頭處的藥液壓力,Pa;
ρ——藥液密度,kg/m3;
g——重力加速度,m/s2;
h0、hi——
藥泵出口、噴頭處的藥液高度,m;
v0、vi——
藥泵出口、噴頭處的藥液流速,m/s;
Δpw——管道壓力損失,Pa。
Δpw=Δpf+Δpr
(11)
Δpf=λl0dρv-22
(12)
Δpr=ξρv-22
(13)
式中:
Δpf——
沿程壓力損失,Pa;
Δpr——
局部壓力損失,Pa;
l0——管道長度,m;
d——管道直徑,m;
v-——藥液平均流速,m/s;
λ——沿程阻力系數;
ξ——局部阻力系數。
根據文獻[20],噴頭射程理論公式為
Rδ=
1Kln1+Kvicosδ1Kg+arctanKgvisinδ+
hiKg+12Kg1Kg+arctanKg
(visinδ)2
(14)
K=34Cddρaρ
(15)
式中:
Rδ——噴頭射程,m;
Cd——摩擦阻力系數;
ρa——空氣密度,kg/m3;
δ——噴射仰角,(°)。
根據標準化果園一般行距,整機寬度為0.88 m,因此最高處噴頭覆蓋至少為2.06 m(圖6)。藥泵型號選擇為LS-535,藥泵壓力在1.5~4.4 MPa可調節,噴速可根據車速以及樹冠大小情況進行調整,實現可變量噴霧。
3 性能試驗
3.1 試驗內容
圖7為果園作業平臺樣機,試驗包括整機基本性能試驗和作業性能試驗,基本性能試驗主要是最小轉彎半徑測定,作業性能試驗包括割草性能試驗、噴霧性能試驗。
試驗選在南京萬村百果園內進行,果園位于江蘇省南京市江寧區谷里街道石壩社區,隸屬于南京萬村黃玉梨專業合作社,是較典型的標準化果園。園區陸地面積約70 hm2,主要有梨、枇杷、楊梅、草莓、火龍果以及獼猴桃等果樹。試驗果園為梨園,每行有梨樹30棵左右,樹冠高度在0.8~2.5 m范圍內,株間距1.5 m,行間距4.2 m。
3.2 基本性能試驗與分析
最小轉彎半徑是評價該平臺在果園中通過性能的重要指標[21]。試驗時,通過遙控使平臺分別完成左轉和右轉運動,得到不同的運動軌跡,對不同運動軌跡上的點進行測量,得到轉彎直徑,計算直徑均值進而獲得平臺的最小轉彎半徑。
測試結果如表2所示,在不掛接機具的情況下,平臺最小轉彎半徑為120.75 cm,相較于空載狀態下其自身長寬尺寸,基本可以認定平臺能夠實現原地轉向,說明其在果園行間具有良好的轉向性能和通過性能。
3.3 作業性能試驗與分析
3.3.1 割草性能測試
進行割草性能試驗時,設定1 500 r/min和2 500 r/min兩種割草轉速,分別調節割刀轉速和高度,記錄不同轉速和不同的留茬高度以及割刀割草作業覆蓋的面積,單位面積內割刀覆蓋面積即為作業覆蓋率。試驗結果如表3所示。
從表3可知,雜草最小留茬高度在5 cm以內,單位面積內割刀覆蓋率達到91.25%以上,當割刀轉速增加或者割刀高度降低時,割草作業覆蓋率增大。
3.3.2 噴霧性能測試
進行噴霧性能測試時,將噴頭的噴霧量作為參考指標,噴頭的噴霧量均勻性常用變異系數來表示[2223]。進行噴霧量測試時,按照以下步驟:(1)在8個噴頭處加裝量筒用以收集噴頭噴出的藥液;(2)打開噴霧裝置,噴霧1min;(3)讀取量筒內的藥液量;(4)分別調節藥泵輸出壓力和行車速度,重復步驟(2)~步驟(4)。
噴霧量變異系數
CV=Sq-×100%
(16)
S=∑(qi-q-)2Ni-1
(17)
q-=∑qiNi
(18)
式中:
S——噴霧量標準差;
Ni——噴頭數量,i=1,2,…,8;
q-——
單位時間內噴頭平均噴霧量,mL/min;
qi——
單位時間內各噴頭的噴霧量,mL/min。
藥箱內的藥液全部用完所耗費時間
t0=V∑qi
(19)
式中:
V——藥箱容積,L。
因此,一個箱藥所能覆蓋株數與車速的對應關系
Nt=tv2γ
(20)
式中:
γ——樹冠半徑,m。
對平臺進行噴霧性能測試為噴霧量測試,不同壓力下的噴藥量如表4所示。
由表4可知,在不同藥泵壓力下,1 min內總噴霧量在[2300mL,6000mL]范圍內,噴霧量均勻性變異系數不超過8.01%,當藥泵噴藥壓力增大時,噴霧量增加且更加穩定均勻。
4 結論
1) 根據果園機械通用化要求,設計一款具備割草、噴藥、搬運等功能的輪式果園多功能自主導航作業平臺。進行了多功能平臺的總體方案設計,并計算確定了搬運、轉向、割草、噴藥等關鍵部件的設計參數:平臺空載時長×寬×高為1 620 mm×884 mm×1 260 mm,最大驅動功率7.5 kW,最大行駛速度5 km/h,整機最大質量350 kg,最大載重300 kg;電動推桿推力5 000 N,割刀電機轉速有1 500 r/min和2 500 r/min兩個擋位可調節,割幅600 mm;藥泵壓力在1.5~4.4 MPa可調節,最高處噴藥幅度在2.06 m以上。
2) 對樣機進行了最小轉彎半徑、割草性能、噴霧性能等基本性能試驗。試驗結果表明,所設計的平臺最小轉彎半徑為120.75 cm,在果園行間行駛具有良好的穩定性和通過性能。設定1 500 r/min和2 500 r/min兩種割草轉速,四種不同割草高度,割草穩定性好,留茬高度在5 cm以內,割草覆蓋率在91.25%以上,當割刀轉速增加或者割刀高度降低時,割刀作業覆蓋率增大。藥泵壓力可以根據不同車速不同樹形進行調節,能實現可變量噴霧,噴霧量均勻性變異系數在8.01%以內,提高噴霧均勻性,減少農藥浪費。
3) 該平臺結構緊湊小巧,能夠配備不同機具,可滿足標準化果園行間的搬運、植保等作業需求。能夠減少果園機械生產成本,提高果園作業效率,對推動果園機械通用化、智能化發展具有重要意義。
參 考 文 獻
[1]張雨, 李薇, 蔡慧, 等. 連棟大棚葡萄套種紫云英對園土理化特性的影響[J]. 現代園藝, 2022, 45(20): 1-3, 9.
[2]李沖沖. 丘陵果園多功能履帶運輸車的設計與試驗[D]. 南京: 南京農業大學, 2018.
Li Chongchong. Design and tests of the multifunctional track transporter for hilly orchard [D]. Nanjing: Nanjing Agricultural University, 2018.
[3]繆友誼, 陳小兵, 朱繼平, 等. 果園作業平臺研究進展分析[J]. 中國農機化學報, 2021, 42(6): 41-49.
Miao Youyi, Chen Xiaobing, Zhu Jiping, et al. Research progress of orchard work platform [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(6): 41-49.
[4]Muro T, He T, Miyoshi M. Effects of a roller and a tracked vehicle on the compaction of a high lifted decomposed granite sandy soil [J]. Journal of Terramechanics, 1998, 35(4): 265-293.
[5]馮上海. 果園多功能管理機監控系統設計與液位負荷濾波研究[D]. 鎮江: 江蘇大學, 2014.
Feng Shanghai. The multifunction management machine monitoring system design and the level of load filter [D]. Zhenjiang: Jiangsu University, 2014.
[6]馬俊貴. 國內第一臺多功能果園作業機問世[J]. 現代農業裝備, 2007(12): 68.
[7]張亞, 劉繼展, 詹國祥, 等. 智能型果園多功能管理機的設計與田間試驗[J]. 江蘇農業科學, 2016, 44(3): 434-438.
[8]李克, 韓晨, 顧文威, 等. 果園履帶自走式多功能管理機應用實踐[J]. 鄉村科技, 2019(33): 124-125.
[9]楊濤, 吳柏強, 李曉曉, 等. 丘陵地形果園多功能電動作業平臺設計與性能研究[J]. 湖北農業科學, 2023, 62(9): 158-164, 169.
Yang Tao, Wu Baiqiang, Li Xiaoxiao, et al. Design and performance study of a multifunctional electric operation platform for orchards in hilly terrain [J]. Hubei Agricultural Sciences, 2023, 62(9): 158-164, 169.
[10]蔚露, 牛自勉, 程曉廷, 等. 梨高光效果園標準化生產關鍵技術[J]. 果樹資源學報, 2021, 2(4): 39-43.
Wei Lu, Niu Zimian, Cheng Xiaoting, et al. Standardized production technique of high lightefficiency pear orchard [J]. Journal of Fruit Resources, 2021, 2(4): 39-43.
[11]徐雄飛. 果園生草技術[J]. 安徽農學通報, 2022, 28(3): 69-70, 78.
[12]汪晨乘. 基于多傳感器融合的果園履帶式移動平臺自主導航研究[D]. 南京: 南京農業大學, 2021.
Wang Chencheng. Autonomous navigation of orchard track mobile platform based on multisensor fusion [D]. Nanjing: Nanjing Agriculture University, 2021.
[13]王旭. 輪式和履帶式拖拉機適應性對比分析[J]. 拖拉機與農用運輸車, 2006(1): 1-2, 13.
Wang Xu. Adaptability comparison between wheeled and crawler tractors [J]. Tractor & Farm Transporter, 2006(1): 1-2, 13.
[14]余卓平, 馮源, 熊璐. 分布式驅動電動汽車動力學控制發展現狀綜述[J]. 機械工程學報, 2013, 49(8): 105-114.
Yu Zhuoping, Feng Yuan, Xiong Lu. Review on vehicle dynamics control of distributed drive electric vehicle [J]. Journal of Mechanical Engineering, 2013, 49(8): 105-114.
[15]王立昂, 劉愛東. 四輪獨立驅動無人車運動控制研究[J]. 光學與光電技術, 2022, 20(2): 95-104.
Wang Liang, Liu Aidong. Tracking control of fourwheel independent drive unmanned vehicle [J]. Optics & Optoelectronic Technology, 2022, 20(2): 95-104.
[16]林乘福, 王雅文, 蘇福功, 等. 雙排輪胎及三排輪胎的應用和試驗[J]. 拖拉機, 1979(6): 46-49.
[17]陸根源. 國內外大中型拖拉機技術發展[J]. 農村機械化, 1997(4): 6-7, 19.
[18]毛鵬軍, 張家瑞, 殷珊珊, 等. 電動拖拉機整車二階動態方程建模仿真[J]. 中國農機化學報, 2019, 40(5): 111-116.
Mao Pengjun, Zhang Jiarui, Yin Shanshan, et al. Modeling and simulation of the second order dynamic equation for electric tractor [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(5): 111-116.
[19]李寶筏. 農業機械學[M]. 北京: 中國農業出版社, 2003.
[20]脫云飛, 楊路華, 柴春嶺, 等. 噴頭射程理論公式與試驗研究[J]. 農業工程學報, 2006(1): 23-26.
Tuo Yunfei, Yang Luhua, Chai Chunling, et al. Experimental study and theoretical formula of the sprinkler range [J]. Transactions of the Chinese Society of Agricultural Engineering, 2006(1): 23-26.
[21]楊福增, 孫景彬, 李亞男, 等. 郁閉果園圖傳遙控式割草機的設計與性能試驗[J/OL]. 吉林大學學報(工學版): 1-18[2022-12-16].
Yang Fuzeng, Sun Jingbin, Li Yanan, et al. Design and performance test of image transmission remote control mower in closed orchard [J/OL]. Journal of Jilin University (Engineering and Technology Edition): 1-18[2022-12-16].
[22]王敏. 防風罩葡萄噴藥設備噴霧性能試驗研究[D]. 秦皇島: 河北科技師范學院, 2022.
Wang Min. Study on spray performance of grape spray equipment of windproof cover [D]. Qinhuangdao: Hebei Normal University of Science & Technology, 2022.
[23]白海超. 水田噴桿噴霧機噴霧裝置優化設計與試驗[D]. 哈爾濱: 東北農業大學, 2019.
Bai Haichao. Optimal design and experiment of spray device for paddy field boom sprayer [J]. Harbin: Northeast Agricultural University, 2019.