改進(jìn)細(xì)菌覓食算法的永磁同步電機(jī)參數(shù)辨識(shí)
2024-05-30 00:00:00邊琦馬建張夢(mèng)寒王建平
電機(jī)與控制學(xué)報(bào) 2024年2期
關(guān)鍵詞:永磁同步電機(jī)

摘 要:
應(yīng)用群智能算法對(duì)永磁同步電機(jī)(PMSM)進(jìn)行參數(shù)辨識(shí)后期容易進(jìn)入局部最優(yōu),從而導(dǎo)致辨識(shí)誤差大,為此提出一種融合小生境技術(shù)的改進(jìn)細(xì)菌覓食算法(MBFA)。通過(guò)構(gòu)建目標(biāo)追蹤函數(shù),利用電機(jī)電流、電壓和轉(zhuǎn)速等直接測(cè)量的信號(hào)實(shí)現(xiàn)對(duì)電機(jī)d軸電感、q軸電感、定子電阻和永磁體磁鏈的快速、準(zhǔn)確辨識(shí);辨識(shí)過(guò)程中通過(guò)引入格型準(zhǔn)則對(duì)目標(biāo)解空間進(jìn)行擬蒙特卡羅采樣提高算法的全局搜索能力;基于小生境技術(shù)進(jìn)行在線多種群協(xié)同搜索策略提高算法的搜索效率和尋優(yōu)精度;最后通過(guò)引入一種種群實(shí)時(shí)監(jiān)測(cè)和動(dòng)態(tài)更新機(jī)制保證了算法在整個(gè)尋優(yōu)過(guò)程的魯棒性。仿真和實(shí)驗(yàn)結(jié)果表明,所提算法在參數(shù)辨識(shí)的快速性、準(zhǔn)確性、穩(wěn)定性方面均表現(xiàn)優(yōu)越,辨識(shí)結(jié)果能夠滿足對(duì)永磁同步電機(jī)進(jìn)行建模和仿真的精度要求。
關(guān)鍵詞:永磁同步電機(jī);參數(shù)辨識(shí);細(xì)菌覓食算法;擬蒙特卡羅采樣;小生境技術(shù);群智能優(yōu)化
DOI:10.15938/j.emc.2024.02.017
中圖分類號(hào):TM351
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1007-449X(2024)02-0174-08
收稿日期: 2022-07-14
基金項(xiàng)目:國(guó)家重點(diǎn)研發(fā)計(jì)劃(2019YFB1600800);國(guó)家自然科學(xué)基金(62103061);中國(guó)博士后科學(xué)基金(2022M720534); 陜西省自然科學(xué)基礎(chǔ)研究計(jì)劃(2021JQ-287,2021JQ-252);長(zhǎng)安大學(xué)中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(300102223202)
作者簡(jiǎn)介:邊 琦(1988—),男,博士,副教授,研究方向?yàn)閺?fù)雜非線性動(dòng)力系統(tǒng)的控制與優(yōu)化;
馬 建(1957—),男,博士,教授,博士生導(dǎo)師,研究方向?yàn)殡妱?dòng)汽車(chē)及清潔能源汽車(chē)技術(shù);
張夢(mèng)寒(1996—),女,碩士,研究方向?yàn)殡娏﹄娮优c電機(jī)傳動(dòng);
王建平(1997—),男,博士研究生,研究方向?yàn)橹悄芸刂啤?/p>
通信作者:馬 建
Parameter identification of permanent magnet synchronous motor based on modified bacterial foraging algorithm
BIAN Qi, MA Jian, ZHANG Menghan, WANG Jianping
(School of Automobile, Chang’an University, Xi’an 710064, China)
Abstract:
In order to solve the problem that the parameter identification of permanent magnet synchronous motor (PMSM) using swarm intelligence algorithm is easy to fall into local optimization in the late stage, resulting in poor identification accuracy, a modified bacterial foraging algorithm (MBFA) integrating niche technology was proposed. By constructing the target tracking function, this method can quickly and accurately identify the d-axis inductance, q-axis inductance, stator resistance and permanent magnet flux linkage of the motor by using the directly measurable signals of motor voltage, current and speed. In the process of identification, Quasi Monte Carlo sampling of the target solution space by introducing lattice criteria improves the global search ability of the algorithm. The online multi group collaborative search strategy based on niche technology improves the search efficiency and optimization accuracy of the algorithm. Finally, a real-time population monitoring and dynamic updating mechanism was introduced to ensure the robustness of the algorithm in the whole optimization process. Simulation and experimental results show that the proposed algorithm is superior in the speed, accuracy and stability of parameter identification. The identification results can meet accuracy requirements of modeling and simulation of permanent magnet synchronous motor.
Keywords:permanent magnet synchronous motor; parameter identification; bacterial foraging algorithm; Quasi Monte Carlo sampling; niching technology; swarm intelligence optimization
0 引 言
永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)因其具有效率高、重量小、反應(yīng)快、結(jié)構(gòu)緊湊、轉(zhuǎn)速范圍廣等優(yōu)點(diǎn)而廣泛地運(yùn)用于各類型電機(jī)驅(qū)動(dòng)系統(tǒng)。由于電機(jī)驅(qū)動(dòng)系統(tǒng)對(duì)精密性及集成度要求較高,相關(guān)電器元件加工難度大,運(yùn)行工況較為復(fù)雜,因此針對(duì)PMSM的相關(guān)研究一直以來(lái)都是工業(yè)生產(chǎn)控制領(lǐng)域的熱點(diǎn)內(nèi)容[1-3]。
PMSM作為很多驅(qū)動(dòng)系統(tǒng)的核心部件,有關(guān)其生產(chǎn)制造及控制技術(shù)的研究已較為成熟,在機(jī)械、電控、航天等各大領(lǐng)域均得到廣泛應(yīng)用。永磁體作為PMSM重要組成部分,對(duì)電機(jī)制造成本、輸出特性均具有重要影響[4]。由于電機(jī)結(jié)構(gòu)緊湊、散熱較慢,當(dāng)電機(jī)永磁材料持續(xù)工作在高溫環(huán)境下,將會(huì)造成永磁體不可逆損耗,即使后期恢復(fù)正常溫度,電機(jī)永磁體磁性也將一直低于正常值。另外,當(dāng)電機(jī)電流瞬間激增或遭受劇烈碰撞,也會(huì)造成電機(jī)不同程度退磁。為了能夠保證PMSM在全生命周期內(nèi)的正常使用,針對(duì)其相關(guān)參數(shù)進(jìn)行快速、準(zhǔn)確辨識(shí)是對(duì)PMSM進(jìn)行建模與控制的基礎(chǔ)[5-6]。
文獻(xiàn)[7]提出一種基于自適應(yīng)正態(tài)云模型的樽海鞘群辨識(shí)算法以解決PMSM在參數(shù)辨識(shí)過(guò)程后期容易進(jìn)入局部最優(yōu),從而導(dǎo)致辨識(shí)精度差的問(wèn)題。該算法通過(guò)在更新階段引入自適應(yīng)正態(tài)云模型,使算法的種群多樣性得到改善,在保證收斂精度的同時(shí),大大提高了算法的迭代速度。文獻(xiàn)[8]提出一種融合差分進(jìn)化算法中的交叉變異策略以及加入動(dòng)態(tài)搜索的麻雀搜索算法。該算法在基本麻雀搜索算法的基礎(chǔ)上,在麻雀發(fā)現(xiàn)者的位置更新階段引入交叉變異策略和動(dòng)態(tài)搜索,使得算法在前期增加了種群的多樣性,避免了陷入局部最優(yōu)的情況。文獻(xiàn)[9]針對(duì)PMSM多參數(shù)高精度辨識(shí)的問(wèn)題,提出一種克隆選擇差分進(jìn)化算法,將其運(yùn)用于永磁同步電機(jī)的多參數(shù)在線辨識(shí)。算法通過(guò)對(duì)差分進(jìn)化算法與免疫克隆選擇算法進(jìn)行混合優(yōu)化,提高種群多樣性,加強(qiáng)了局部和全局的搜索能力。文獻(xiàn)[10]針對(duì)傳統(tǒng)粒子群算法辨識(shí)永磁同步電機(jī)參數(shù)過(guò)程中,由于粒子在迭代后期易陷入局部最優(yōu)從而無(wú)法滿足辨識(shí)精度要求的問(wèn)題,提出一種結(jié)合小生境技術(shù)和混沌變異策略的改進(jìn)粒子群算法。該辨識(shí)方法不需推導(dǎo)復(fù)雜的電機(jī)數(shù)學(xué)模型,即可同時(shí)辨識(shí)PMSM的多組參數(shù)。文獻(xiàn)[11]提出一種基于人工魚(yú)群算法的PMSM參數(shù)辨識(shí)方法以提高PMSM的參數(shù)辨識(shí)度。該方法以PMSM待辨識(shí)參數(shù)作為位置向量,以d-q軸電流誤差的平方和與時(shí)間乘積的積分作為優(yōu)化目標(biāo),給定待辨識(shí)參數(shù)范圍后,通過(guò)迭代尋優(yōu)得到待辨識(shí)參數(shù)的最優(yōu)值。
細(xì)菌覓食算法(bacterial foraging optimization,BFO)是一種通過(guò)對(duì)自然界中細(xì)菌種群在覓食過(guò)程中的行為進(jìn)行計(jì)算模擬所獲得的啟發(fā)式算法。自其提出之初便獲得了科研工作者們的極大興趣,并隨著不斷地發(fā)展和完善,被越來(lái)越廣泛地應(yīng)用于各個(gè)工程領(lǐng)域并得到了驗(yàn)證[12-14]。文獻(xiàn)[15]針對(duì)傳統(tǒng)支持向量機(jī)算法(support vector machine,SVM)在變電站變壓器故障診斷中存在準(zhǔn)確率不高的問(wèn)題,在大數(shù)據(jù)環(huán)境下,提出一種基于BFO改進(jìn)SVM的電力變壓器故障診斷模型,對(duì)變壓器故障測(cè)試數(shù)據(jù)進(jìn)行測(cè)試診斷。文獻(xiàn)[16]針對(duì)應(yīng)用BFO處理水面艦艇路徑規(guī)劃時(shí)易于陷入局部最優(yōu)的問(wèn)題,提出一種基于模擬退火策略的BFO算法。該算法通過(guò)將模擬退火機(jī)制引入到BFO算法的遷移操作中,加快算法收斂速度,提高求解質(zhì)量。文獻(xiàn)[17]提出一種基于改進(jìn)BFO算法的多模態(tài)參數(shù)優(yōu)化方法以處理飛控系統(tǒng)參數(shù)的優(yōu)化問(wèn)題。所提算法可以有效地簡(jiǎn)化系統(tǒng)調(diào)參的過(guò)程,更快速地獲得一個(gè)滿足設(shè)計(jì)性能期望的飛控系統(tǒng)。
本文針對(duì)PMSM的參數(shù)辨識(shí)問(wèn)題,在構(gòu)建PMSM電壓方程和待辨識(shí)參數(shù)適應(yīng)度函數(shù)的基礎(chǔ)上,提出一種基于改進(jìn)細(xì)菌覓食算法(modified bacterial foraging algorithm,MBFA)的PMSM參數(shù)快速辨識(shí)方法,將對(duì)PMSM相關(guān)參數(shù)的辨識(shí)問(wèn)題轉(zhuǎn)化為對(duì)目標(biāo)函數(shù)的優(yōu)化問(wèn)題。通過(guò)引入格型準(zhǔn)則對(duì)目標(biāo)解空間進(jìn)行擬蒙特卡羅采樣并構(gòu)建基于小生境技術(shù)的多種群并行搜索策略以兼顧算法的全局搜索能力和局部尋優(yōu)精度。同時(shí),通過(guò)引入一種種群動(dòng)態(tài)更新機(jī)制以確保算法尋優(yōu)的魯棒性。最后,通過(guò)仿真實(shí)驗(yàn)與PMSM測(cè)試臺(tái)架試驗(yàn)驗(yàn)證了本文所提算法在參數(shù)辨識(shí)過(guò)程中的精確性和有效性,辨識(shí)結(jié)果能夠滿足對(duì)PMSM的建模和仿真精度要求。
第5步,種群繁殖:在完成細(xì)菌群聚操作后,整個(gè)種群將進(jìn)行下一代的繁殖操作。在該過(guò)程中,按其所屬適應(yīng)度值對(duì)每個(gè)細(xì)菌進(jìn)行升序排列,然后移除適應(yīng)度不佳的個(gè)體,而對(duì)于優(yōu)秀的個(gè)體則令其在所處區(qū)域一分為二。
第6步,種群分散:為了避免整個(gè)種群在迭代過(guò)程中陷入局部最優(yōu),在一定尋優(yōu)步驟后將進(jìn)行種群分散操作。根據(jù)所設(shè)定的概率,當(dāng)某個(gè)細(xì)菌滿足條件時(shí),將其直接清除或?qū)⑵湟苿?dòng)到搜索空間的其他區(qū)域。
第7步,種群更新:在搜索的過(guò)程中,為了保證整個(gè)種群的搜索效率,引入一種種群健康度監(jiān)測(cè)機(jī)制以動(dòng)態(tài)更新種群中搜索能力較差的個(gè)體。首先將所有種群中個(gè)體按其適應(yīng)度進(jìn)行排序;然后在每次迭代搜索結(jié)束后對(duì)整個(gè)種群個(gè)體進(jìn)行遍歷,如果任何一個(gè)個(gè)體在排序序列的后百分之ρe存在超過(guò)te步,則剔除該個(gè)體并應(yīng)用格型準(zhǔn)則生成新的個(gè)體;此外,如果任何2個(gè)個(gè)體之間的距離小于re,則具有較低適應(yīng)度的個(gè)體也將被新生成的個(gè)體替換。
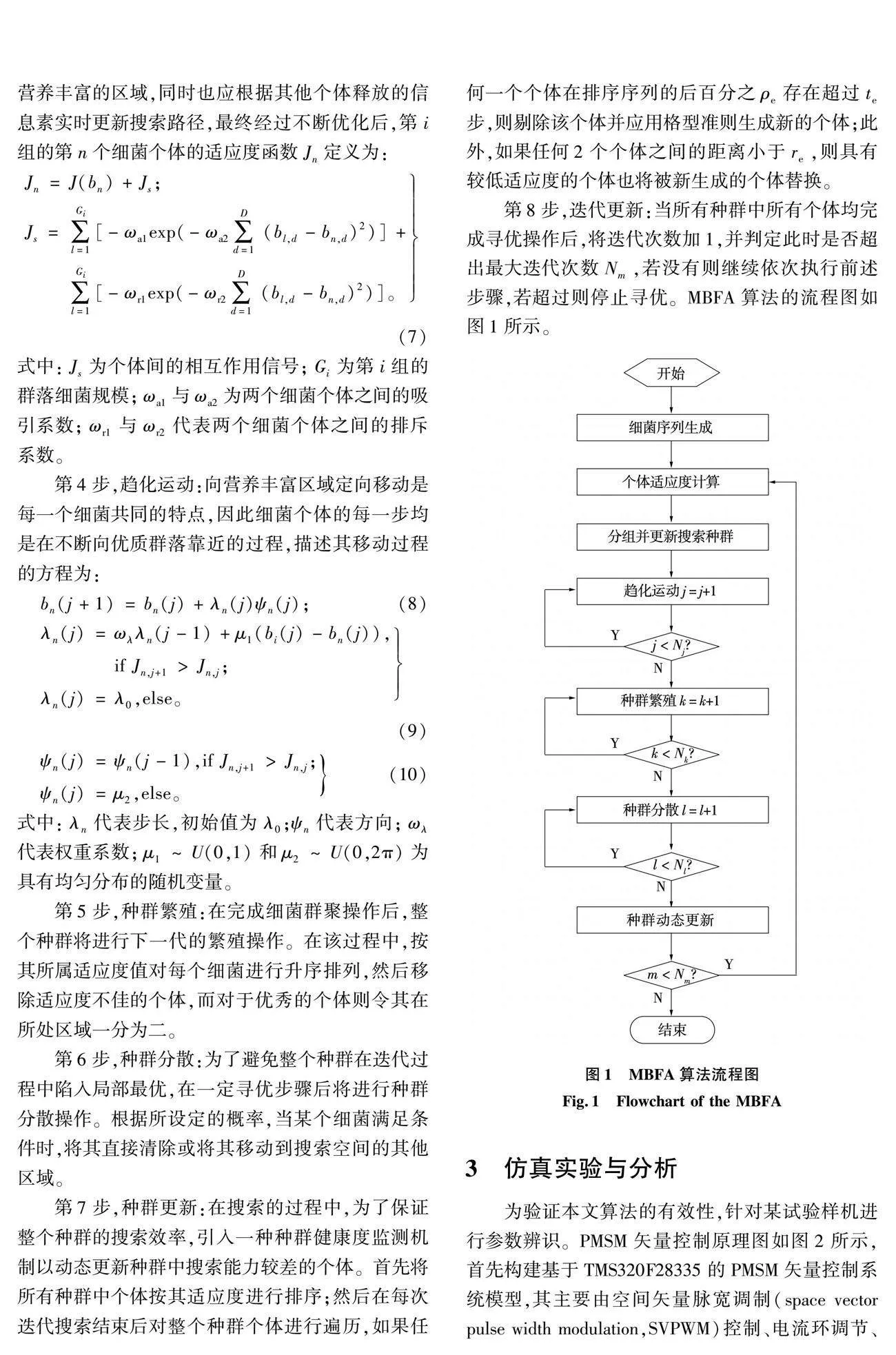
第8步,迭代更新:當(dāng)所有種群中所有個(gè)體均完成尋優(yōu)操作后,將迭代次數(shù)加1,并判定此時(shí)是否超出最大迭代次數(shù)Nm,若沒(méi)有則繼續(xù)依次執(zhí)行前述步驟,若超過(guò)則停止尋優(yōu)。MBFA算法的流程圖如圖1所示。
3 仿真實(shí)驗(yàn)與分析
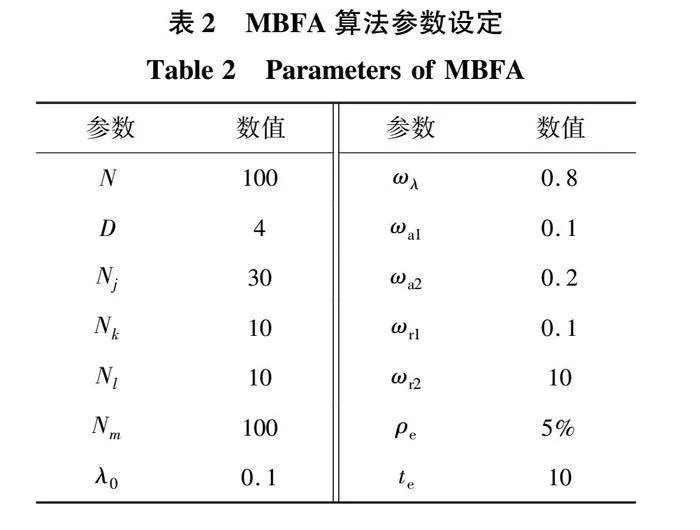
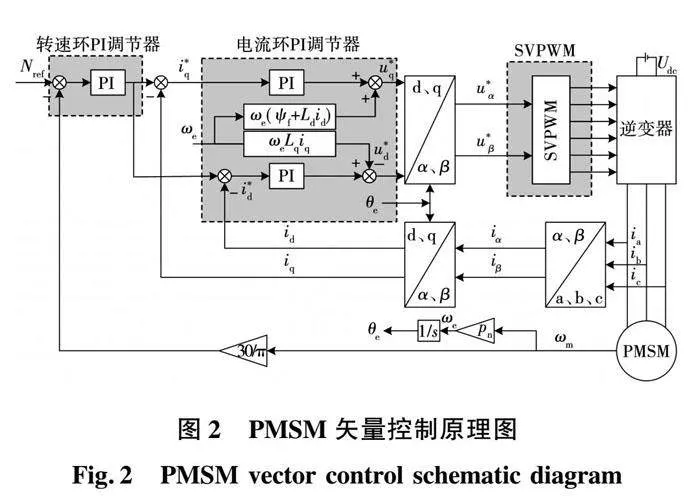
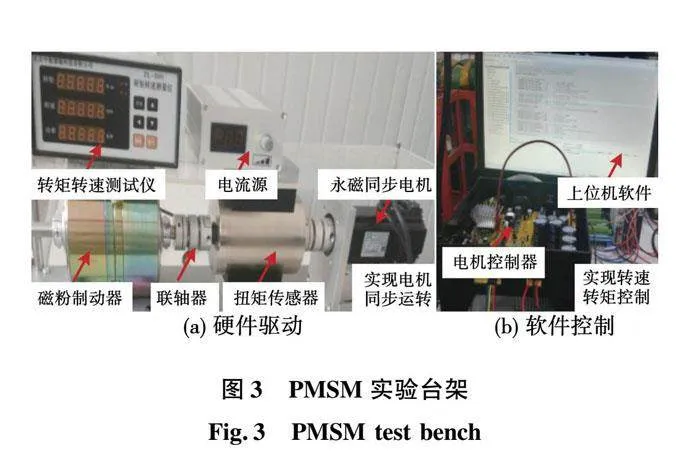
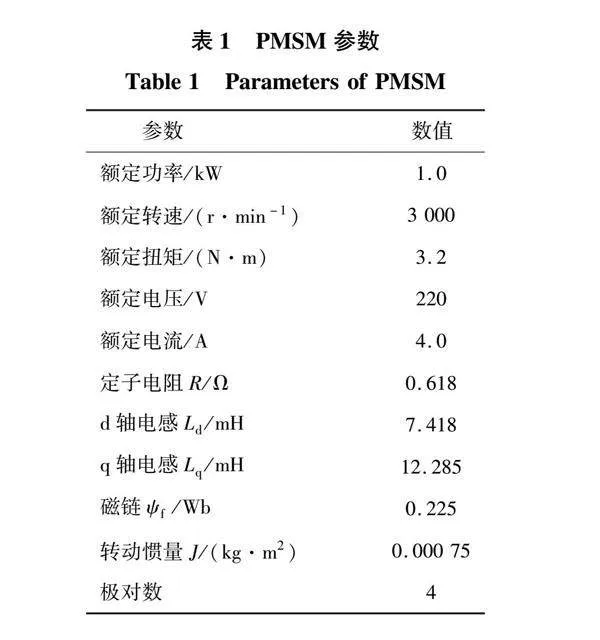
為驗(yàn)證本文算法的有效性,針對(duì)某試驗(yàn)樣機(jī)進(jìn)行參數(shù)辨識(shí)。PMSM矢量控制原理圖如圖2所示,首先構(gòu)建基于TMS320F28335的PMSM矢量控制系統(tǒng)模型,其主要由空間矢量脈寬調(diào)制(space vector pulse width modulation,SVPWM)控制、電流環(huán)調(diào)節(jié)、轉(zhuǎn)速環(huán)調(diào)節(jié)三大模塊組成。PMSM測(cè)試臺(tái)架如圖3所示,設(shè)定電機(jī)轉(zhuǎn)速為3 000 r/min,輸出轉(zhuǎn)矩為3.2 N·m,分別采用id=0 A和id=-1 A的控制策略進(jìn)行實(shí)驗(yàn)。在電機(jī)運(yùn)行穩(wěn)定后,采集電機(jī)運(yùn)轉(zhuǎn)過(guò)程中的電流、電壓、轉(zhuǎn)速等數(shù)據(jù),并對(duì)采集數(shù)據(jù)濾波后應(yīng)用本文算法進(jìn)行參數(shù)辨識(shí)。用于實(shí)驗(yàn)的PMSM參數(shù)如表1所示。基于MBFA算法進(jìn)行PMSM參數(shù)辨識(shí)時(shí),算法參數(shù)設(shè)定如表2所示。
將本文算法與目前應(yīng)用廣泛的3種群智能算法進(jìn)行對(duì)比仿真,分別為自適應(yīng)粒子群算法(adaptive particle swarm optimizer,APSO)[18]、增強(qiáng)型進(jìn)化聚類算法(enhanced evolutionary clustering algorithm,EECA)[19]、經(jīng)典細(xì)菌覓食算法(bacterial foraging algorithm,BFA)[20]。為了確保對(duì)比實(shí)驗(yàn)的一致性,4種算法的種群規(guī)模均設(shè)置為100,迭代步數(shù)均為100,同時(shí)初始搜索區(qū)間均保持一致。此外為減小統(tǒng)計(jì)誤差,所有實(shí)驗(yàn)均獨(dú)立運(yùn)行30次,取平均值作為最終輸出結(jié)果。
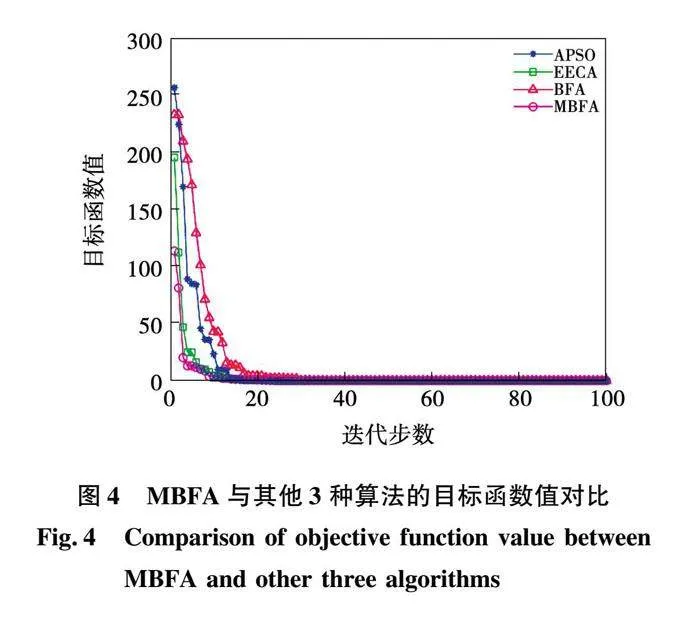
首先,為測(cè)試本文算法的收斂速度,圖4分別給出應(yīng)用上述4種算法對(duì)PMSM進(jìn)行參數(shù)辨識(shí)后目標(biāo)函數(shù)值的下降曲線。可以看出,4種算法在經(jīng)過(guò)100次迭代后均能收斂到穩(wěn)定的目標(biāo)函數(shù)值,證明4種算法均能夠?qū)崿F(xiàn)全局尋優(yōu),同時(shí)APSO、EECA、BFA 3種算法的目標(biāo)函數(shù)值均能在30步后進(jìn)入收斂,證明3種算法均具有較好的收斂能力,只是迭代過(guò)程的波動(dòng)幅度與最終收斂的總步長(zhǎng)有所差異。相比于其他3種算法,MBFA算法不僅具有較低的初始目標(biāo)函數(shù)值,同時(shí)收斂的速度也更為快速。
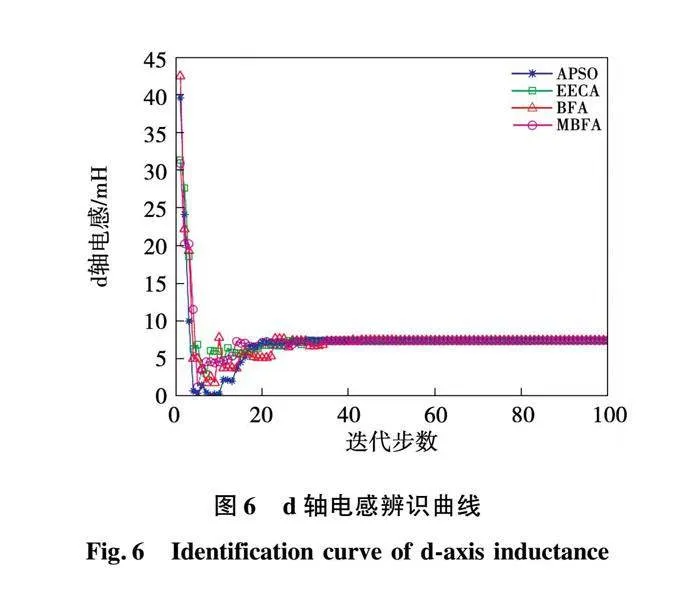
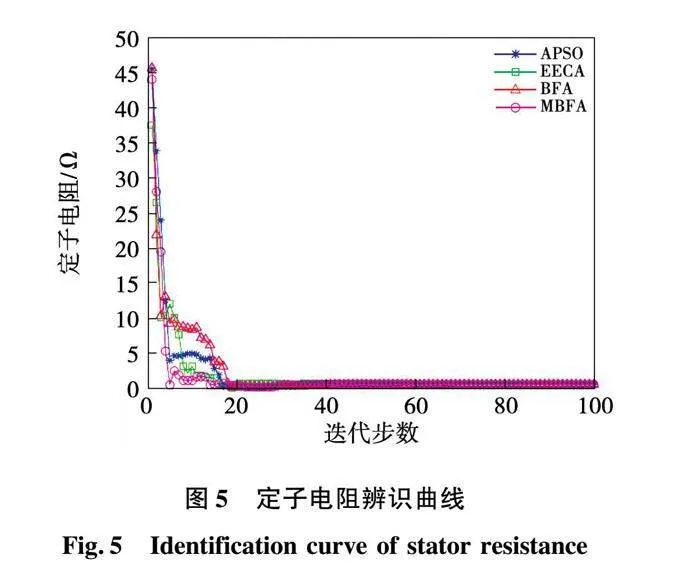
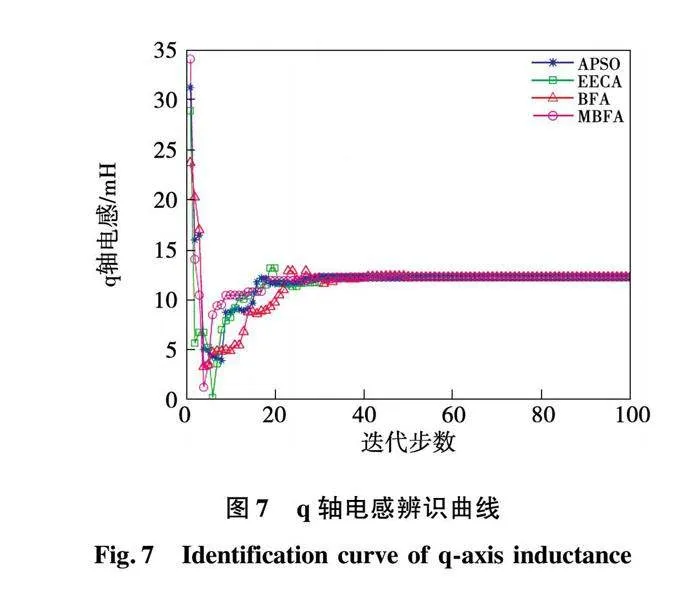
然后,分別應(yīng)用本文算法和其他3種算法對(duì)待測(cè)電機(jī)參數(shù)進(jìn)行辨識(shí),辨識(shí)曲線如圖5~圖8所示。可以看出,應(yīng)用4種算法進(jìn)行辨識(shí)的過(guò)程中,待辨識(shí)參數(shù)曲線均具有較快的初始收斂速度,且能夠在迭代后期進(jìn)入穩(wěn)定狀態(tài)。相較于其他3種算法,本文算法在尋優(yōu)的過(guò)程中波動(dòng)較小,具有更好的穩(wěn)定性。
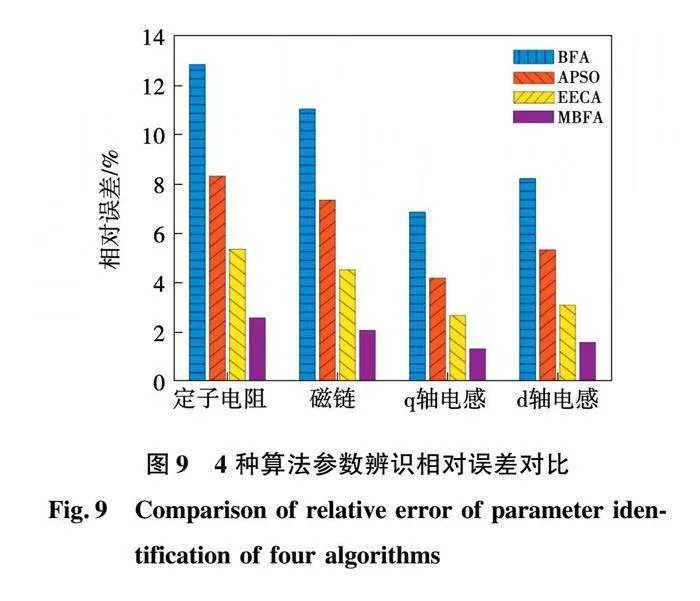
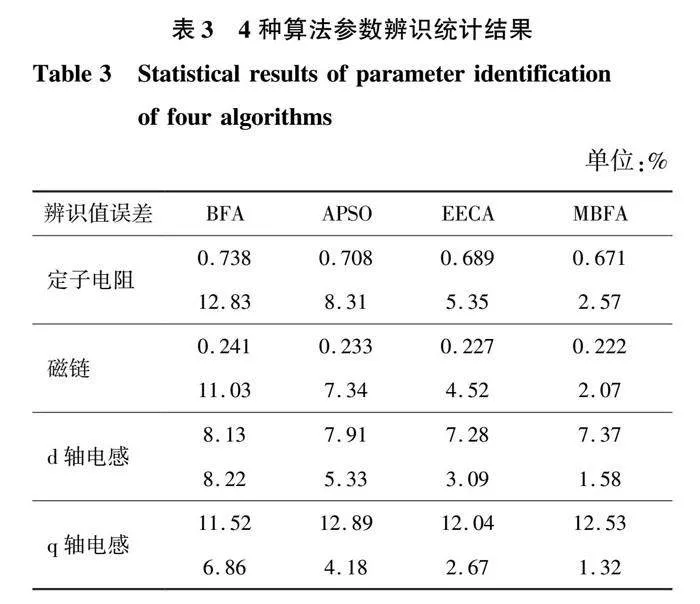
對(duì)應(yīng)用前述4種算法的辨識(shí)結(jié)果進(jìn)行統(tǒng)計(jì),如表3所示,相對(duì)誤差對(duì)比如圖9所示。從圖和表中可以看出,與APSO、EECA、BFA 3種算法相比,應(yīng)用本文算法對(duì)4個(gè)參數(shù)的辨識(shí)結(jié)果最大誤差為2.57%,每一個(gè)參數(shù)辨識(shí)相對(duì)誤差均為最小,且相對(duì)誤差均在3%之內(nèi),該辨識(shí)結(jié)果已能夠滿足對(duì)PMSM進(jìn)行建模和仿真的精度要求。分析可知,通過(guò)采用基于格型準(zhǔn)則的細(xì)菌序列生成方法與種群自適應(yīng)搜索策略對(duì)MBFA性能的改進(jìn)效果明顯,算法在參數(shù)辨識(shí)的準(zhǔn)確性、高效性、魯棒性方面均表現(xiàn)優(yōu)越。
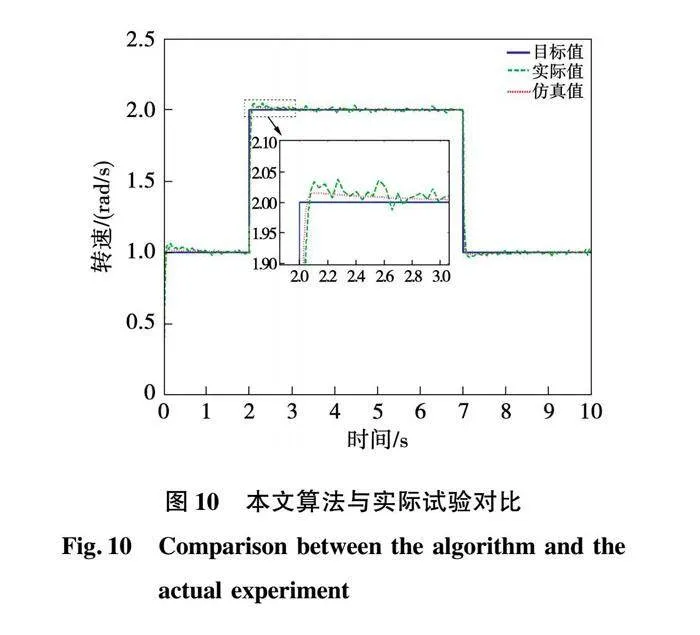
最后,將本文算法獲得的參數(shù)辨識(shí)結(jié)果進(jìn)行電機(jī)建模和仿真,并與實(shí)際電機(jī)轉(zhuǎn)速控制試驗(yàn)結(jié)果進(jìn)行對(duì)比,如圖10所示。可以看出,應(yīng)用本文算法的仿真結(jié)果與實(shí)際試驗(yàn)結(jié)果的相符度較高,誤差較小,辨識(shí)結(jié)果能夠滿足對(duì)PMSM進(jìn)行建模和仿真的精度要求。
4 結(jié) 論
本文針對(duì)PMSM的參數(shù)辨識(shí)問(wèn)題,提出一種基于MBFA的參數(shù)辨識(shí)方法。在構(gòu)建PMSM電壓方程和待辨識(shí)參數(shù)適應(yīng)度函數(shù)的基礎(chǔ)上,將對(duì)PMSM相關(guān)參數(shù)的辨識(shí)問(wèn)題轉(zhuǎn)化為對(duì)目標(biāo)函數(shù)的優(yōu)化問(wèn)題。通過(guò)引入格型準(zhǔn)則對(duì)目標(biāo)解空間進(jìn)行擬蒙特卡羅采樣并構(gòu)建基于小生境技術(shù)的多種群并行搜索策略以兼顧算法的全局搜索能力和局部尋優(yōu)精度。同時(shí)通過(guò)引入一種種群動(dòng)態(tài)更新機(jī)制以確保算法尋優(yōu)的魯棒性。通過(guò)與其他3種經(jīng)典算法的辨識(shí)對(duì)比實(shí)驗(yàn),驗(yàn)證了本文所提算法在參數(shù)辨識(shí)過(guò)程中的快速性和穩(wěn)定性,在PMSM測(cè)試臺(tái)架上的試驗(yàn)證明了本文算法不僅能夠在尋優(yōu)初期快速收斂到真實(shí)值附近,而且最終求解參數(shù)值也具有較高的精度,辨識(shí)結(jié)果能夠滿足對(duì)PMSM的建模和仿真精度要求。
參 考 文 獻(xiàn):
[1] 劉忠永,范濤,何國(guó)林,等.高性能永磁同步電機(jī)顯式模型預(yù)測(cè)控制算法研究[J].電工技術(shù)學(xué)報(bào),2023,38(22):6039.
LIU Zhongyong, FAN Tao, HE Guolin,et al. Research on high-performance explicit model predictive control algorithm for permanent magnet synchronous motors[J]. Transactions of China Electrotechnical Society,2023,38(22):6039.
[2] ULLAH K, GUZINSKI J, MIRZA A F. Critical review on robust speed control techniques for permanent magnet synchronous motor (PMSM) speed regulation[J]. Energies,2022,15(3):1235.
[3] 王政,溫從劍,朱辰雨,等.位置伺服永磁電機(jī)魯棒性無(wú)差拍預(yù)測(cè)轉(zhuǎn)速控制[J].電工技術(shù)學(xué)報(bào),2023,38(19):5176.
WANG Zheng, WEN Congjian, ZHU Chenyu,et al. Robust deadbeat predictive control for position servo permanent magnet motor[J]. Transactions of China Electrotechnical Society,2023,38(19):5176.
[4] 李耀華,趙承輝,周逸凡,等.基于數(shù)據(jù)驅(qū)動(dòng)的永磁同步電機(jī)深度神經(jīng)網(wǎng)絡(luò)控制[J].電機(jī)與控制學(xué)報(bào),2022,26(1):115.
LI Yaohua, ZHAO Chenghui, ZHOU Yifan, et al. Deep neural network control of permanent magnet synchronous motors based on data-driven control [J]. Electric Machines and Control,2022,26(1):115.
[5] HANWOONG A, PARK H, KIM C,et al. A review of state-of-the-art techniques for PMSM parameter identification[J]. Journal of Electrical Engineering amp; Technology,2020,15(3):1177.
[6] 徐琛杰,章瑋.基于統(tǒng)一模型的永磁同步電機(jī)故障診斷[J].電機(jī)與控制學(xué)報(bào),2022,26(4):9.
XU Chenjie, ZHANG Wei. Fault diagnosis of permanent magnet synchronous motor based on unified model [J]. Electric Machines and Control,2022,26(4):9.
[7] 張鑄,張仕杰,饒盛華,等.改進(jìn)樽海鞘群算法的永磁同步電機(jī)多參數(shù)辨識(shí)[J].電機(jī)與控制學(xué)報(bào),2022,26(8):139.
ZHANG Zhu, ZHANG Shijie, RAO Shenghua,et al. Multi-parameter identification of permanent magnet synchronous motor based on improved salp swarm algorithm [J]. Electric Machines and Control,2022,26(8):139.
[8] 曹永娟,毛瑞,馮亮亮,等.基于改進(jìn)麻雀搜索算法的永磁同步電機(jī)多參數(shù)辨識(shí)[J].電工電能新技術(shù),2022,41(5):26.
CAO Yongjuan, MAO Rui, FENG Liangliang,et al. Multi parameter identification of permanent magnet synchronous motors based on improved sparrow search algorithm[J]. New Technology of Electrical Energy,2022,41(5):26.
[9] 陳強(qiáng),傅煜,蔡琦盼.基于克隆選擇差分進(jìn)化算法的永磁同步電機(jī)參數(shù)辨識(shí)[J].傳感器與微系統(tǒng),2022,41(1):135.
CHEN Qiang, FU Yu, CAI Qipan. Parameter identification of permanent magnet synchronous motors based on clone selection differential evolution algorithm [J].Sensors and Microsystems,2022,41(1):135.
[10] 劉細(xì)平,胡衛(wèi)平,鄒永玲,等.改進(jìn)粒子群算法的永磁同步電機(jī)多參數(shù)辨識(shí)[J].電機(jī)與控制學(xué)報(bào),2020,24(7):112.
LIU Xiping, HU Weiping, ZOU Yongling,et al. Multi parameter identification of permanent magnet synchronous motors using improved particle swarm optimization algorithm[J]. Electric Machines and Control,2020,24(7):112.
[11] 陶丁興,王家軍.基于人工魚(yú)群算法的PMSM參數(shù)辨識(shí)[J].杭州電子科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2021,41(5):47.
TAO Dingxing, WANG Jiajun. PMSM parameter identification based on artificial fish swarm algorithm [J]. Journal of Hangzhou University of Electronic Science and Technology (Natural Science Edition),2021,41(5):47.
[12] CHEN Huiling, ZHANG Qian, LUO Jie,et al. An enhanced bacterial foraging optimization and its application for training kernel extreme learning machine[J]. Applied Soft Computing,2020,86:105884.
[13] BIAN Qi, NENER B, WANG Jianping,et al. A fitness sharing based ant clustering method for multimodal optimization of the aircraft longitudinal automatic carrier landing system [J]. Aerospace Science and Technology,2022,122:107392.
[14] BIAN Qi, NENER B, WANG Xinmin. A modified bacterial-foraging tuning algorithm for multimodal optimization of the flight control system [J]. Aerospace Science and Technology,2019,93:105274.
[15] 金海川,陳佳雪,張磊,等.基于細(xì)菌覓食改進(jìn)SVM的變電站智能檢測(cè)方法[J].自動(dòng)化與儀器儀表,2021(11):52.
JIN Haichuan, CHEN Jiaxue, ZHANG Lei,et al. Intelligent detection method for substations based on bacterial foraging improved SVM [J]. Automation and Instrumentation, 2021(11): 52.
[16] 龍洋,蘇義鑫,廉城,等.混合細(xì)菌覓食算法求解無(wú)人艇路徑規(guī)劃問(wèn)題[J].華中科技大學(xué)學(xué)報(bào)(自然科學(xué)版),2022,50(3):68.
LONG Yang, SU Yixin, LIAN Cheng, et al. Hybrid bacterial foraging algorithm for solving unmanned boat path planning problem [J]. Journal of Huazhong University of Science and Technology (Natural Science Edition),2022,50(3):68.
[17] 邊琦,張夢(mèng)寒,王建平,等.基于改進(jìn)細(xì)菌覓食算法的飛控系統(tǒng)多模態(tài)參數(shù)優(yōu)化[J].控制與決策,2022,37(8):1981.
BIAN Qi, ZHANG Menghan, WANG Jianping, et al. Multimodal parameter optimization of flight control systems based on improved bacterial foraging algorithms [J]. Control and Decision,2022,37(8):1981.
[18] LI Dongyang, GUO Weian, LERCH A,et al. An adaptive particle swarm optimizer with decoupled exploration and exploitation for large scale optimization [J]. Swarm and Evolutionary Computation,2021,60:100789.
[19] XU Yunlang, YANG Xiaofeng, YANG Zhile, et al. An enhanced differential evolution algorithm with a new oppositional-mutual learning strategy[J]. Neurocomputing, 2021,435:162.
[20] LI Jun, DANG Jianwu, FENG Bu, et al. Analysis and improvement of the bacterial foraging optimization algorithm [J]. Journal of Computing Science and Engineering, 2014,8(1):1.
(編輯:邱赫男)
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車(chē)工程學(xué)報(bào)(2016年5期)2017-01-16 02:42:50
計(jì)算技術(shù)與自動(dòng)化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國(guó)科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識(shí)與技術(shù)(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識(shí)與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識(shí)與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學(xué)學(xué)報(bào)(2015年6期)2016-02-18 00:26:49
