基于改進遺傳算法的列車自動駕駛規劃速度曲線生成研究
2024-06-14 04:20:58華潤愷于逸塵李紀元
交通科技與管理 2024年8期
華潤愷 于逸塵 李紀元
摘要 針對現有城軌列車自動駕駛過程中的準時性、停車精準性、節能性以及舒適性的問題,文章提出一種改進遺傳算法,旨在實現對城軌列車自動駕駛的準點、精準停車、節能及舒適等運行指標的多目標優化,并提高傳統遺傳算法的尋優效率。仿真結果表明,采用所提算法能滿足列車運行的安全、準時和精準停車基本約束條件,同時,降低了運行能耗,提高了運行舒適度。
關鍵詞 城軌列車;自動駕駛;遺傳算法;多目標優化
中圖分類號 U284.48文獻標識碼 A文章編號 2096-8949(2024)08-0018-04
0 引言
列車自動駕駛(Automatic Train Operation,ATO)系統能夠在給定約束條件和評價指標下基于規劃算法尋找出滿足要求的規劃速度曲線,指導列車跟隨該規劃速度曲線運行,國內外學者對此開展了研究[1],取得了一定的成果。Wang M[2]等通過螢火蟲算法實現了列車運行工況轉換點速度序列的最佳搜索,達到了列車節能運行的目的。丁文君[3]構建了規劃速度曲線優化模型,并以動態規劃最優性原理為基礎確定模型求解路徑,實現了列車運行的多目標優化,但是動態規劃無法很好地解決準點和精準停車目標的問題。張明銳等、陳榮武等[4-5]基于遺傳算法對列車規劃速度曲線進行了優化,并取得了較好的優化效果。結合現有研究,該文提出一種基于改進遺傳算法的規劃算法,實現對列車運行安全、準時、精準停車、能耗和舒適度指標的多目標優化。
1 列車動力學模型、約束條件和評價指標
1.1 列車動力學模型建立
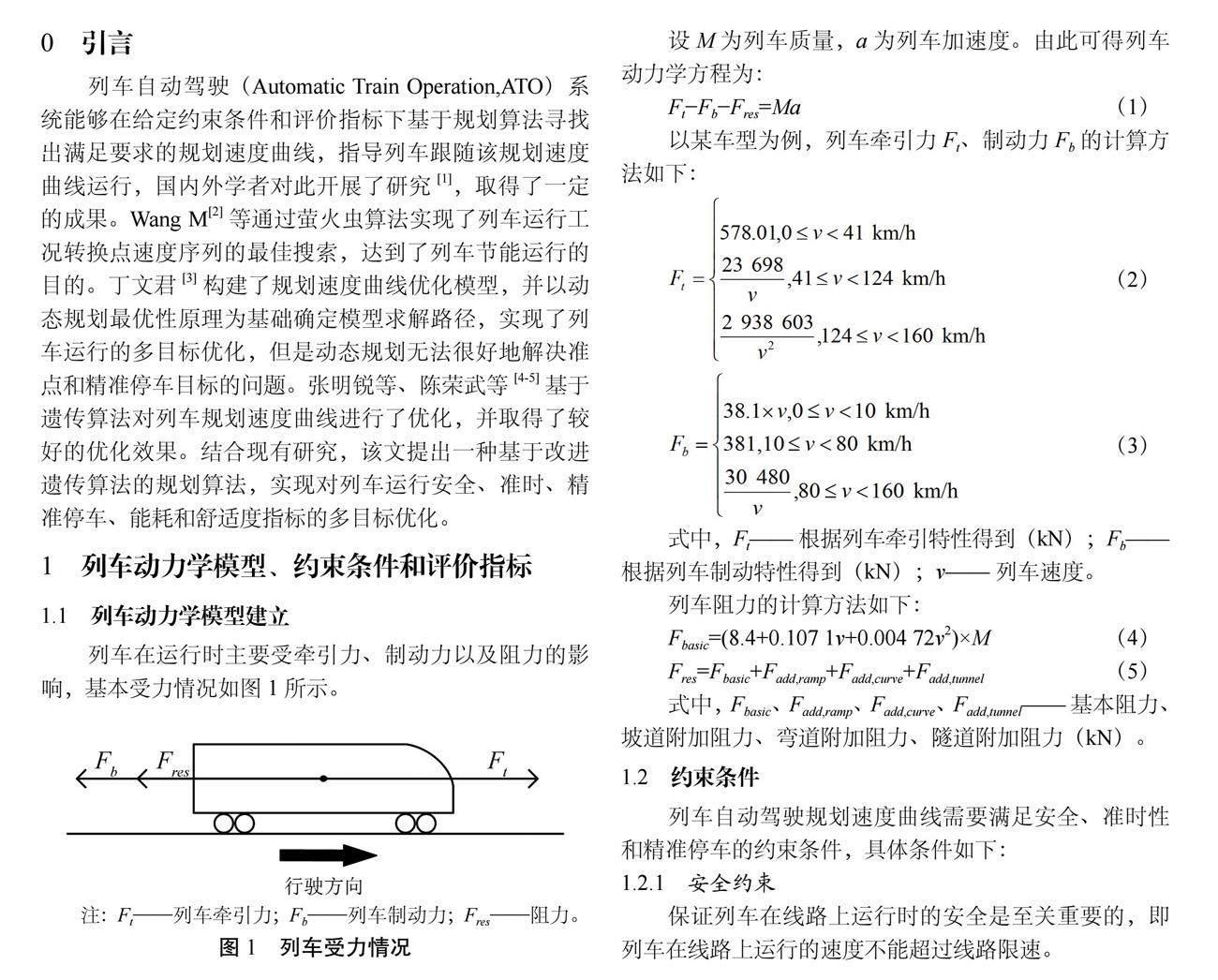
列車在運行時主要受牽引力、制動力以及阻力的影響,基本受力情況如圖1所示。
設M為列車質量,a為列車加速度。由此可得列車動力學方程為:
Ft?Fb?Fres=Ma (1)
以某車型為例,列車牽引力Ft、制動力Fb的計算方法如下:
(2)
(3)
式中,Ft——根據列車牽引特性得到(kN);Fb——
根據列車制動特性得到(kN);v——列車速度。
列車阻力的計算方法如下:
Fbasic=(8.4+0.107 1v+0.004 72v2)×M (4)
Fres=Fbasic+Fadd,ramp+Fadd,curve+Fadd,tunnel (5)
式中,Fbasic、Fadd,ramp、Fadd,curve、Fadd,tunnel——基本阻力、坡道附加阻力、彎道附加阻力、隧道附加阻力(kN)。
1.2 約束條件
列車自動駕駛規劃速度曲線需要滿足安全、準時性和精準停車的約束條件,具體條件如下:
1.2.1 安全約束
保證列車在線路上運行時的安全是至關重要的,即列車在線路上運行的速度不能超過線路限速。
1.2.2 準時性約束
列車是否準點出發和到達,決定著交通運輸效率的高低,通常要求列車實際運行時間與計劃運行時間的偏差在 5%范圍內。
1.2.3 精準停車約束
由于城市軌道交通系統均安裝了站臺屏蔽門,通常要求城軌列車停車誤差在(?30,30)cm 這個范圍內。
1.3 評價指標
在滿足了上述基本約束條件后,該文還將從能耗和舒適度指標出發,來評價規劃生成的目標速度曲線是否合理。假設將運行區間線路總長度L等距離離散為N個點,其中第n個點的位置為sn,速度為vn,加速度為an,牽引力為Ft,n,制動力為Fb,n,從起點至第n個點總共用時為tn,則相鄰兩點位置間的運行步長可表示為:
(6)
1.3.1 能耗指標
列車的能耗評價指標一般采用牽引力的做功情況來表示,該指標越小,表征運行過程越節能。通過對單列車動力學模型進行計算,可以得到列車運行的能耗評價指標為:
(7)
式中,μ——能量吸收率。
1.3.2 舒適度指標
列車的舒適度評價指標一般采用加速度的變化率來表示,該指標越小,表征列車運行過程越舒適。該評價指標可表示為:
C (8)
2 改進遺傳算法
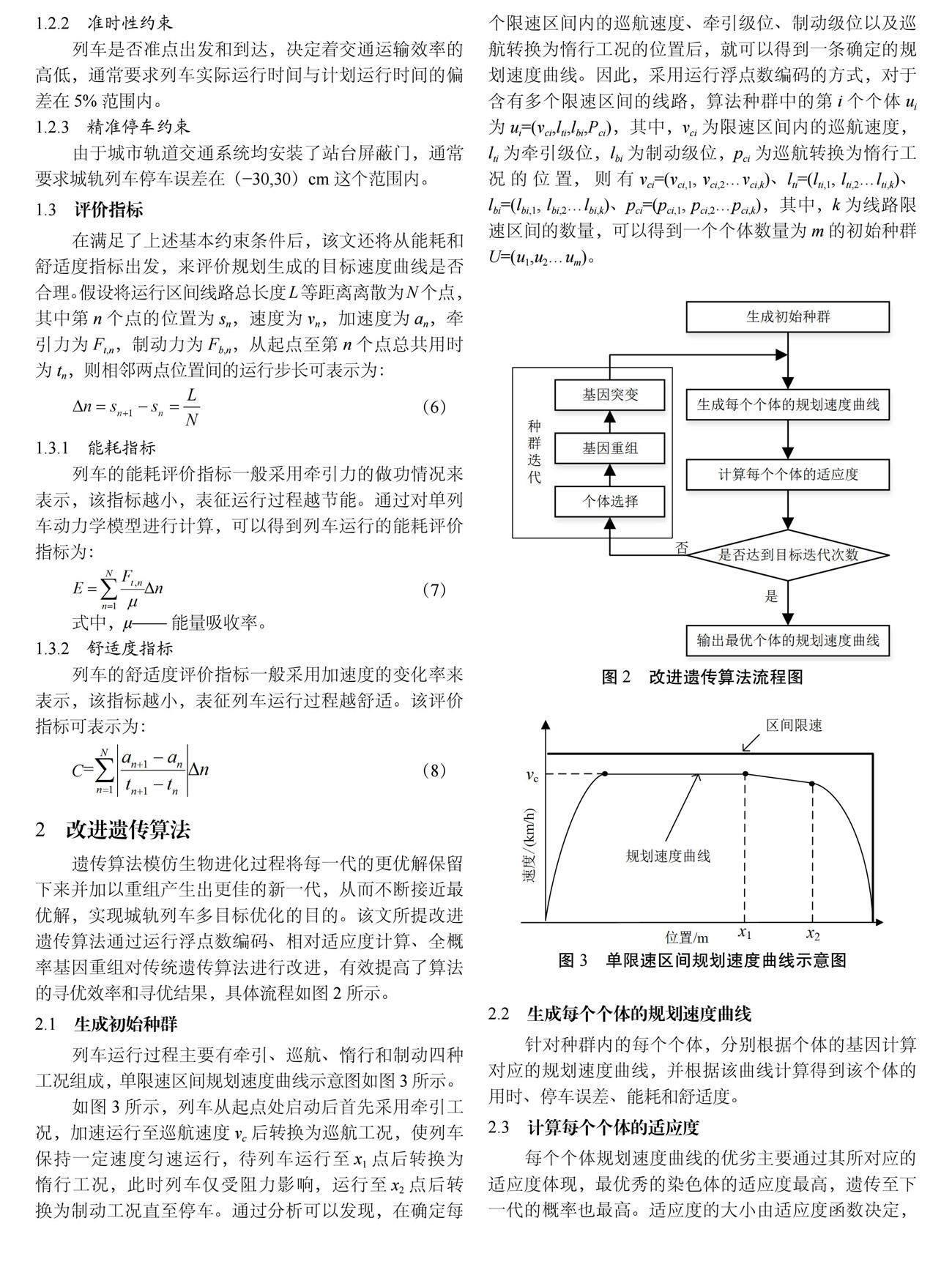
遺傳算法模仿生物進化過程將每一代的更優解保留下來并加以重組產生出更佳的新一代,從而不斷接近最優解,實現城軌列車多目標優化的目的。該文所提改進遺傳算法通過運行浮點數編碼、相對適應度計算、全概率基因重組對傳統遺傳算法進行改進,有效提高了算法的尋優效率和尋優結果,具體流程如圖2所示。
2.1 生成初始種群
列車運行過程主要有牽引、巡航、惰行和制動四種工況組成,單限速區間規劃速度曲線示意圖如圖3所示。
如圖3所示,列車從起點處啟動后首先采用牽引工況,加速運行至巡航速度vc后轉換為巡航工況,使列車保持一定速度勻速運行,待列車運行至x1點后轉換為惰行工況,此時列車僅受阻力影響,運行至x2點后轉換為制動工況直至停車。通過分析可以發現,在確定每個限速區間內的巡航速度、牽引級位、制動級位以及巡航轉換為惰行工況的位置后,就可以得到一條確定的規劃速度曲線。因此,采用運行浮點數編碼的方式,對于含有多個限速區間的線路,算法種群中的第i個個體ui為ui=(vci,lti,lbi,Pci),其中,vci為限速區間內的巡航速度,lti為牽引級位,lbi為制動級位,pci為巡航轉換為惰行工況的位置,則有vci=(vci,1, vci,2…vci,k)、lti=(lti,1, lti,2…lti,k)、lbi=(lbi,1, lbi,2…lbi,k)、pci=(pci,1, pci,2…pci,k),其中,k為線路限速區間的數量,可以得到一個個體數量為m的初始種群U=(u1,u2…um)。
2.2 生成每個個體的規劃速度曲線
針對種群內的每個個體,分別根據個體的基因計算對應的規劃速度曲線,并根據該曲線計算得到該個體的用時、停車誤差、能耗和舒適度。
2.3 計算每個個體的適應度
每個個體規劃速度曲線的優劣主要通過其所對應的適應度體現,最優秀的染色體的適應度最高,遺傳至下一代的概率也最高。適應度的大小由適應度函數決定,由于在生成曲線時已經滿足安全和精準停車的約束,因此適應度函數主要考慮列車運行的準時、能耗和舒適度指標,種群中第i個個體的適應度由式(9)得到:
Ki=λ1kt,i+λ2ke,i+λ3kc,i (9)
式中,λ1、λ2、λ3——各運行指標的權重,要滿足λ1+λ2+λ3=1;kt,i、ke,i、kt,i分別對應準時、能耗及舒適度指標。該算法在能耗和舒適度性能指標采用相對適應度計算的方式,避免在初期迭代時因種群整體節能性和舒適性較差而造成較多個體死亡的情況,計算方式如下:
kt,i=|Tc,i?T0| (10)
ke,i (11)
kc,i (12)
式中,Tc,i——第i個個體實際運行時間;T0——時刻表中計劃用時;Ei——第i個個體的能耗指標;Emax、Emin——種群中能耗最高和最低個體的能耗指標;Ci——第i個個體的舒適度指標;Cmax、Cmin——種群中舒適度最高和最低的個體的舒適度指標。
在得到每個個體的適應度后,判斷當前種群迭代次數是否已經達到目標迭代次數,若已經達到,則輸出適應度最高個體的規劃速度曲線,若當前種群迭代次數還未達到目標迭代次數,則進行種群迭代。
2.4 種群迭代
2.4.1 個體選擇
在得到每個個體的適應度后,遍歷種群中的每一個個體,分別生成一個0~1區間內的隨機數r,若第i個個體的適應度Ki > r,則該個體存活;若Ki ≤ r,則將該個體刪除,從而使優秀個體盡可能遺傳至下一代中。
2.4.2 基因重組
對存活的個體進行全概率基因重組,首先隨機選擇兩個存活的個體,稱為父代和母代,通過取隨機數的方式確定基因重組的位點,將父代和母代進行基因重組生成子代,并于新形成的子代組成新的種群。
2.4.3 基因變異
為防止過早收斂,設定基因變異概率pm,遍歷新種群內的每一個個體,隨機生成一個0~1內的數r,若r > pm,則該個體不進行基因變異;若r ≤ pm,即任意選擇該個體的某一個基因,隨機增大或減小其數值。
3 仿真驗證
3.1 仿真參數
選取某實際線路的某一運行區間,相應仿真參數如表1所示。
3.2 仿真結果
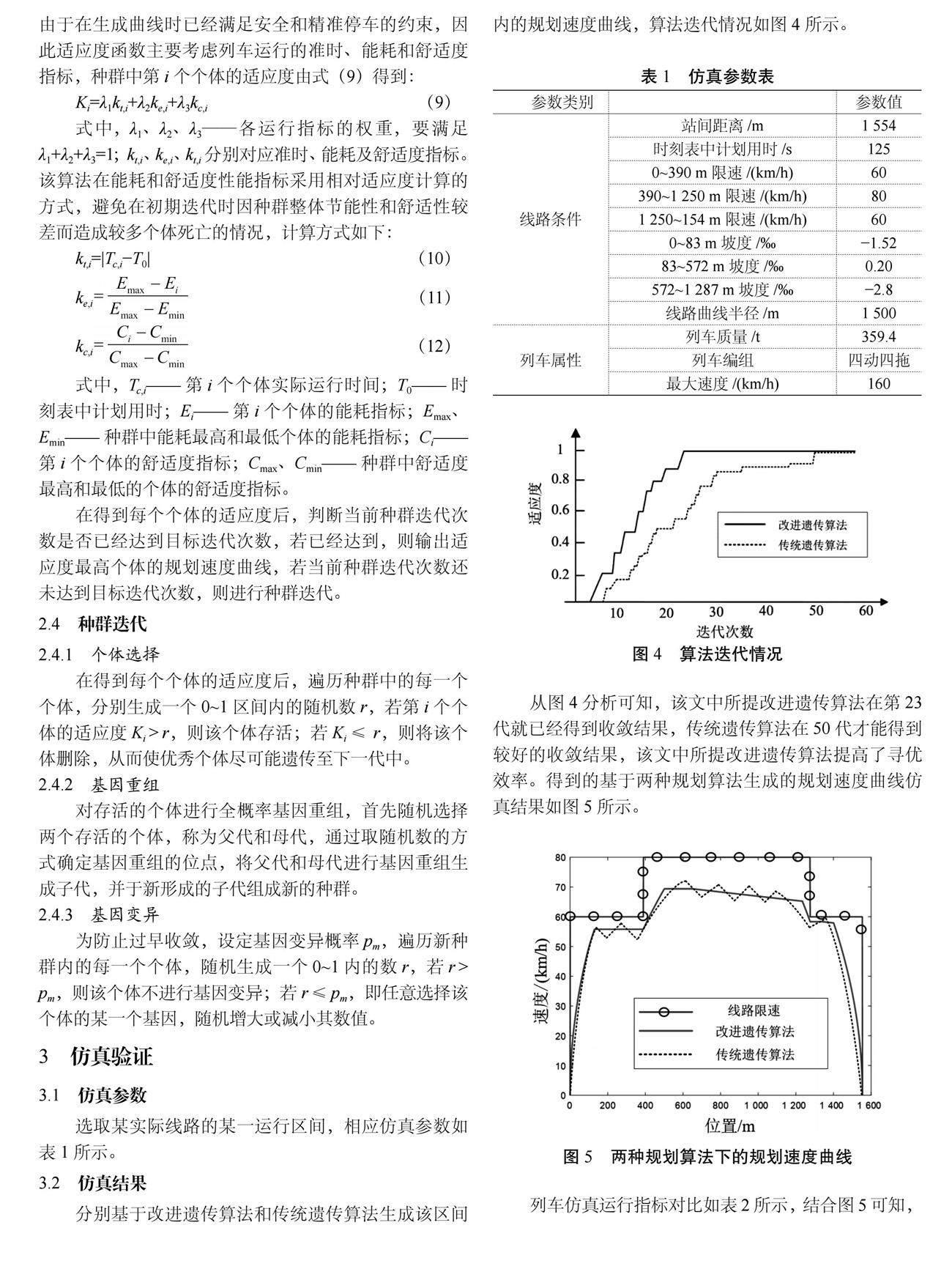
分別基于改進遺傳算法和傳統遺傳算法生成該區間內的規劃速度曲線,算法迭代情況如圖4所示。
從圖4分析可知,該文中所提改進遺傳算法在第23代就已經得到收斂結果,傳統遺傳算法在50代才能得到較好的收斂結果,該文中所提改進遺傳算法提高了尋優效率。得到的基于兩種規劃算法生成的規劃速度曲線仿真結果如圖5所示。
列車仿真運行指標對比如表2所示,結合圖5可知,采用該文所提改進遺傳算法生成的規劃速度曲線可以通過計算以巡航工況代替原先的牽引和制動工況,減少了不必要的牽引和制動過程,優化了列車運行能耗和舒適度指標。同時,該文所提算法后列車準時性、停車準確性、節能性和舒適性均顯著優于傳統遺傳算法,進一步驗證了該文所提算法的有效性。
4 結語
該文以列車自動駕駛規劃速度曲線生成算法作為研究基礎,提出一種基于改進遺傳算法的規劃算法,通過運行浮點數編碼、相對適應度計算、全概率基因重組對傳統遺傳算法進行改進,提高了算法迭代尋優的效率,實現對列車運行安全、準時、精準停車、能耗和舒適度指標的多目標優化,對該文所提方法進行實際線路的仿真,驗證了該文提出的算法的有效性和優化效果。
該文所提算法采用單質點模型對列車進行建模,針對重載列車等車身較長、需要考慮多質點模型的列車類型,如何進行多質點建模是下一步的研究方向。
參考文獻
[1]寧濱, 郜春海, 李開成, 等. 中國城市軌道交通全自動運行系統技術及應用[J]. 北京交通大學學報, 2019(1): 6-11.
[2]Wang M, Wang L, Xu X, et al. Genetic Algorithm-Based Particle Swarm Optimization Approach to Reschedule High-Speed Railway Timetables: A Case Study in China[J]. Journal of Advanced Transportation, 2019(PT. 2): 6090742. 1-6090742. 12.
[3]丁文君. 基于多目標決策的軌道交通ATO運行模式曲線優化研究[J]. 電子測量技術, 2020(12): 65-69.
[4]張明銳, 李俊江, 林永樂, 等. 基于免疫退火遺傳算法的城市軌道交通列車節能運行策略[J]. 城市軌道交通研究, 2021(12): 28-33+37.
[5]陳榮武, 劉莉, 郭進. 基于遺傳算法的列車運行能耗優化算法[J]. 交通運輸工程學報, 2012(1): 108-114.