仿蝙蝠飛行器撲翼結構設計與運動仿真
2024-07-01 00:06:54王智森張春濤
廊坊師范學院學報(自然科學版) 2024年2期
關鍵詞:結構設計
王智森 張春濤


【摘?? 要】?? 基于大耳蝙蝠飛行時翅膀的飛行姿態和運動軌跡,對翅膀結構進行簡化處理,模仿設計了一種二自由度的仿蝙蝠飛行器撲翼,能夠實現上下撲動和收放動作。借助MATLAB/UG軟件完成撲翼尺寸參數求解、結構三維建模、關鍵節點運動軌跡生成及上下撲動機構和收放機構的運動仿真分析。結果表明:節點角位移變化曲線連續不間斷,未出現角度突變,不會造成瞬時沖擊,翼尖關節之間運動不產生干涉,驗證了撲翼運動的可行性,同時為后續優化設計提供理論依據。
【關鍵詞】?? 仿蝙蝠飛行器;撲翼;結構設計;運動仿真
Flapping-wing Structure Design and Motion Simulation of Bat-like Aircraft
Wang Zhisen , Zhang Chuntao
(Jingdezhen University, Jingdezhen 333400, China)
【Abstract】??? This article is based on the flight posture and trajectory of the wings of the large eared bat during flight, simplifying the wing structure and simulating the design of a two degree of freedom bat-like aircraft flapping wings, which can achieve up and down flapping and retracting movements. With the help of MATLAB/UG software, the flapping wing size parameters are solved, the three-dimensional structure is modeled, the key node motion trajectory is generated, and the motion simulation analysis of the up and down flapping mechanism and the retracting mechanism is completed. The results show that the angular displacement curve of the joint is continuous without sudden change of angle, which will not cause instantaneous impact, and the movement between the wingtip joints does not interfere with each other, which verifies the feasibility of the flapping wing movement and provides a theoretical basis for the subsequent optimization design.
【Key words】???? bat-like aircraft; flapping wing; structural design; motion simulation
〔中圖分類號〕 TP391.9????????????? ?????? ????? ???〔文獻標識碼〕? A????? ???????????? 〔文章編號〕 1674 - 3229(2024)02- 0062 - 04
[收稿日期]?? 2023-11-30
[基金項目]?? 江西省教育廳科技項目(GJJ2202409)
[作者簡介]?? 王智森(1992-? ),男,碩士,景德鎮學院講師,研究方向:現代設計方法與數值仿真。
0???? 引言
近年來微型電機技術、新型復合材料及3D打印等領域創新性成果發展迅猛,使得新型仿生撲翼飛行器的設計成為熱門的研究方向[1]。仿蝙蝠飛行器作為仿生撲翼飛行器常見三大類之一,以高機動性、高隱蔽性及高環境適應性等特點著稱,在軍事和民用領域均具有廣泛的應用前景[2]。國外針對仿生撲翼飛行器的研究起步較早且技術成熟,其中以美國知名大學研究者研制的一款仿生蝙蝠撲翼飛行器為代表,機翼采用高度可伸縮的硅基薄膜材料,兩側采用直流無刷電機驅動提供動力,形態特征與蝙蝠呈高匹配性,整機質量只有93 g,撲翼拍打頻率達到驚人的10 Hz[3]。國內關于仿生撲翼飛行器的實際應用前景廣闊,關鍵理論技術創新不斷取得突破,較為先進的如北京航空航天大學研發的仿鳥型撲翼飛行器和西北工業大學研發的仿蝴蝶型撲翼飛行器[4]。本文基于大耳蝙蝠飛行時翅膀的飛行姿態和運動軌跡,模仿并簡化設計了一種仿蝙蝠飛行器撲翼結構,針對撲翼進行軌跡分析及運動仿真,驗證撲翼結構設計的合理性和可行性。
1???? 仿蝙蝠飛行器撲翼結構設計
1.1?? 撲翼機構方案確定
蝙蝠作為唯一能夠實現飛行運動的哺乳動物,在漫長的演變過程中前肢逐漸進化成為翼手。蝙蝠的翼手主要由肩關節、大臂、肘關節、小臂、腕關節和5根手指6部分組成。蝙蝠的肩部結構極其復雜,分布著20多塊肌肉,一共具有5個自由度,因而能實現5個自由度的運動,應對復雜環境的飛行適應性極強,其中最為顯著的運動是肩部的上下撲動與揮擺。研究發現,以常見大耳蝙蝠為例,翅膀上下撲動角大小的變化范圍約為-13°~43.8°,撲動角位移隨時間以正弦運動規律變化[5]。
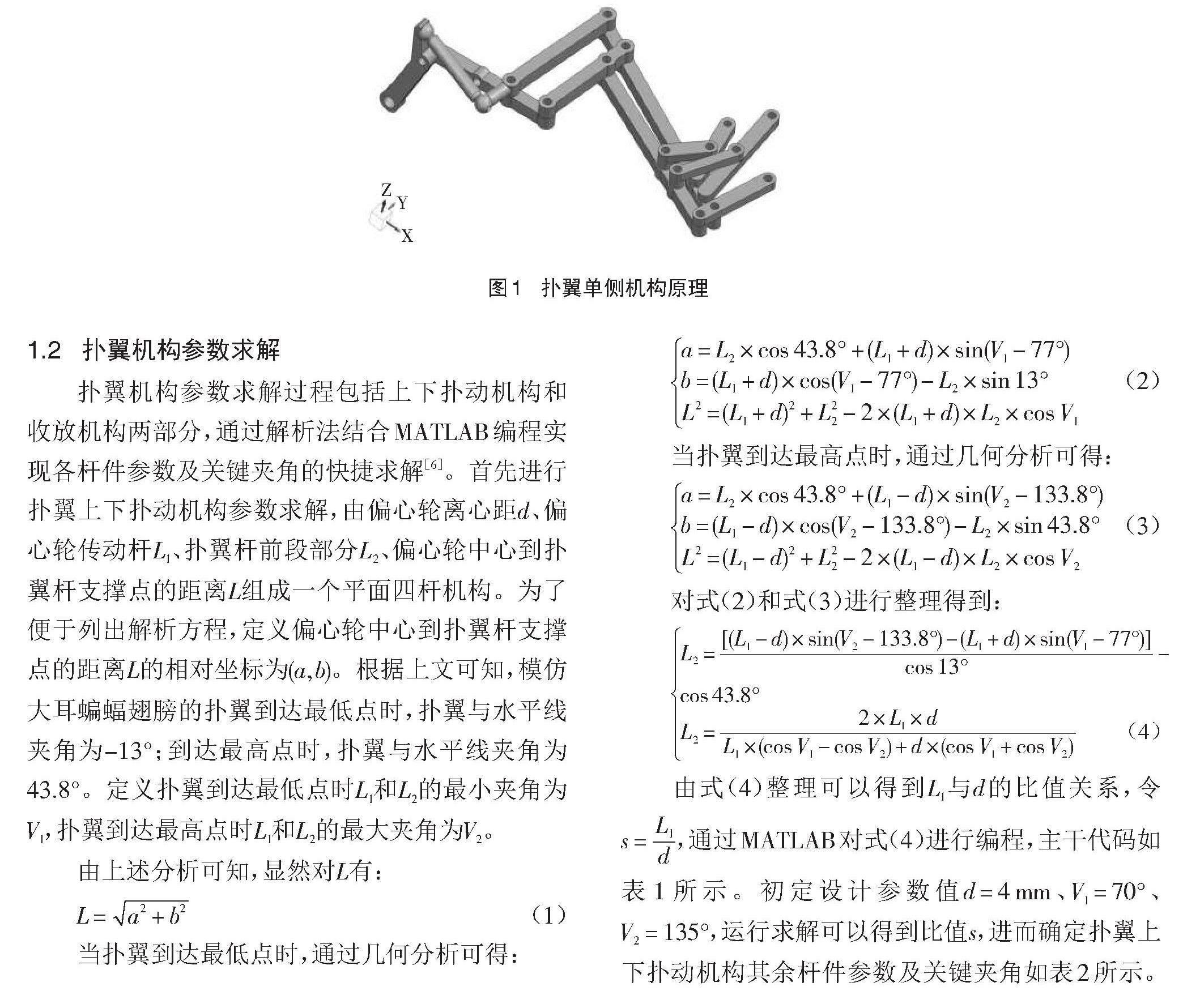
本文從蝙蝠飛行過程的運動特點出發,在保留蝙蝠飛行姿態的前提下對仿蝙蝠飛行器撲翼進行機構簡化。在撲翼單側的肩部布置2個自由度,分別模仿蝙蝠翅膀部分用于驅動仿蝙蝠飛行器的撲翼進行上下撲動和收放動作,撲翼兩側整體呈對稱布置,單側機構原理如圖1所示。利用曲軸和偏心輪機構實現撲翼部分的上下撲動和收放2個運動的相互關聯,同時利用齒輪機構將雙翼撲動自由度進行相互關聯,使撲翼兩側的各部分運動實現同步。為了簡化機構,僅保留蝙蝠翼手部分最長的3根手指,同時將單根手指簡化成為一個桿件進行分析。由于蝙蝠在飛行過程中手指間的夾角變化并不顯著,故采用轉動副連接于同一平面連桿機構中擬合手指之間夾角的變化。
1.2?? 撲翼機構參數求解
撲翼機構參數求解過程包括上下撲動機構和收放機構兩部分,通過解析法結合MATLAB編程實現各桿件參數及關鍵夾角的快捷求解[6]。首先進行撲翼上下撲動機構參數求解,由偏心輪離心距[d]、偏心輪傳動桿[L1]、撲翼桿前段部分[L2]、偏心輪中心到撲翼桿支撐點的距離[L]組成一個平面四桿機構。為了便于列出解析方程,定義偏心輪中心到撲翼桿支撐點的距離[L]的相對坐標為[(a,b)]。根據上文可知,模仿大耳蝙蝠翅膀的撲翼到達最低點時,撲翼與水平線夾角為-13°;到達最高點時,撲翼與水平線夾角為43.8°。定義撲翼到達最低點時[L1]和[L2]的最小夾角為[V1],撲翼到達最高點時[L1]和[L2]的最大夾角為[V2]。
由上述分析可知,顯然對[L]有:
[L=a2+b2]???????????????????????? (1)
當撲翼到達最低點時,通過幾何分析可得:
[a=L2×cos43.8°+(L1+d)×sin(V1-77°)b=(L1+d)×cos(V1-77°)-L2×sin13°L2=(L1+d)2+L22-2×(L1+d)×L2×cosV1] (2)
當撲翼到達最高點時,通過幾何分析可得:
[a=L2×cos43.8°+(L1-d)×sin(V2-133.8°)b=(L1-d)×cos(V2-133.8°)-L2×sin43.8°L2=(L1-d)2+L22-2×(L1-d)×L2×cosV2] (3)
對式(2)和式(3)進行整理得到:
[L2=[(L1-d)×sin(V2-133.8°)-(L1+d)×sin(V1-77°)]cos13°-cos43.8°L2=2×L1×dL1×(cosV1-cosV2)+d×(cosV1+cosV2)??????? (4)]??????? 由式(4)整理可以得到[L1]與[d]的比值關系,令[s=L1d],通過MATLAB對式(4)進行編程,主干代碼如表1所示。初定設計參數值[d=4 mm]、[V1=70°]、[V2=135°],運行求解可以得到比值[s],進而確定撲翼上下撲動機構其余桿件參數及關鍵夾角如表2所示。
撲翼收放機構簡圖如圖2所示,可以拆分為六部分:由Yd、Y1、Y2-1、L2-1組成的曲柄搖桿機構;由L2-2、Y2-2、Y3、Y5-1組成的雙搖桿機構1;由Y3-2、Y4、W3-1、Y5組成的雙搖桿機構2;包含Y6、W1的翼手機構1;包含Y7、W2的翼手機構2;包含W3的翼手機構3。
對雙搖桿機構2、翼手機構1、翼手機構2及翼手機構3進行分析,當撲翼逐漸舒展即W1、W2、W3逐漸張開時,Y4與W3連接點到Y5的距離先增大后減小;Y4與Y6連接點到Y5與W1連接點的距離逐漸增大;Y4與Y7連接點到Y5與W2連接點的距離相對不變,且W2和L2始終保持近乎垂直的姿態;當撲翼收放到最小時,W1、W2、W3處于近乎平行的姿態,因此Y3-2的長度大于W3-1的長度。繼續針對雙搖桿機構1進行分析,當撲翼收放到最小時,Y5和Y2成銳角且達到最小值,同時Y2和L2呈現垂直姿態,且為了撲翼運動過程中重心保持不變,使L2-2與Y5-1的長度相等。綜上分析當撲翼收放到最小時,可得:
[(Yd+Y1)2=Y2-12+L2-12]????????????? (5)
設定初始參數值[Yd=4 mm]、[Y1=10 mm],代入撲翼桿前段[L2-1=11.7 mm],由式(5)求得曲柄搖桿機構桿件[Y2-1=8 mm]。雙搖桿機構和翼手機構的設計求解過程與上述類似,不再贅述[7]。利用MATLAB編程配合解析法快捷求解其余桿件參數,得到撲翼收放機構其余桿件參數如表3所示。
1.3?? 撲翼結構設計
由于仿蝙蝠飛行器的撲翼單側分別具有2個自由度,機構具有確定運動的條件為其所具有的自由度數目等于原動件數目。為了使所設計的仿蝙蝠飛行器撲翼具有確定的運動軌跡,必須設計兩個原動件分別驅動撲翼的上下撲動和收放動作。鑒于撲翼雙翼拍動的過程中需要很強的同步性,并且在傳動過程中所傳遞的扭矩較大,以實現拍動空氣獲得升力,因此要求所選擇的傳動機構能夠承受較大載荷及穩定傳動比。采用齒輪機構及偏心輪機構對撲翼雙翼進行驅動,使整體結構更加緊湊,以滿足仿蝙蝠飛行器撲翼雙翼的同步性要求。根據1.2中撲翼上下撲動機構和收放機構分別求解得到的尺寸參數,借助UG軟件完成仿蝙蝠飛行器撲翼部件、齒輪、偏心輪等結構的三維簡化建模并進行裝配,得到仿蝙蝠飛行器撲翼簡化處理結構如圖3所示。
2???? 仿蝙蝠飛行器撲翼運動仿真分析
2.1?? 撲翼關鍵節點運動軌跡
基于UG軟件的運動仿真分析功能模塊,對仿蝙蝠飛行器撲翼關鍵節點進行運動特性研究。仿真模擬過程主要包括如下4個階段:建立撲翼結構UG裝配模型,確定上下撲動機構與收放機構裝配順序,避免出現欠約束或過約束情況;創建運動分析方案,根據機構自由度數及運動副關系逐個對各機構連桿添加運動副,如旋轉副、球面副等;進行撲翼關鍵節點運動仿真分析,標識各節點運動軌跡;輸出仿真結果數據[8];利用UG軟件中運動模擬設計模塊中的軌跡生成器命令,選擇仿蝙蝠飛行器撲翼的肩關節、大臂、肘關節、小臂、腕關節和翼手6個關鍵節點位置進行運動軌跡模擬,如圖4所示。
由圖4分析可知:仿蝙蝠飛行器撲翼上下撲動和收放動作均能夠實現,撲翼上下撲動軌跡為一段弧形,翼手收放軌跡為一個近似橢圓形,且均未出現運動干涉及沖擊突變,實際運動軌跡與理想運動軌跡相擬合,驗證了結構設計的合理性。
2.2?? 撲翼運動仿真分析
設定該飛行器撲翼齒輪軸的角速度為20 rad/s,分析單翼運動仿真流程,選取撲翼桿小臂關節點進行測量,得到撲翼上下撲動機構中撲翼桿小臂關節點的角位移隨時間變化曲線,如圖5所示。
由圖5分析可知:在1個撲動循環周期內,撲翼上下撲動角大小約為55°,角位移曲線隨時間近似呈正弦運動規律變化,與大耳蝙蝠翅膀的撲動規律相吻合。角位移變化平穩,未出現角度突變,不會造成瞬時沖擊,符合仿蝙蝠飛行器撲翼上下撲動動作的穩定性要求。1個撲動循環周期中下行速度較快,符合機構的急回運動特性,節省空回行程的時間,提高飛行效率。
撲翼收放機構同理上下撲動機構運動仿真分析流程,分別選取2個翼手翼尖關鍵節點進行分析,借助UG軟件中運動模擬設計模塊中的監視和圖表命令輸出運動仿真結果,測得上述2個關鍵節點的角位移隨時間變化曲線,如圖6所示。
由圖6分析可知:1個收放循環周期時間約為7.5 s,翼尖角位移變化平穩且同步,有利于提高撲翼的機動性。角位移變化曲線連續不間斷,不會產生瞬時沖擊,翼手翼尖關節之間運動不產生干涉,驗證了撲翼收放機構運動的可行性及穩定性。
3???? 結語
本文對仿蝙蝠飛行器撲翼上下撲動機構和收放機構的方案確定、參數求解、結構設計及運動仿真分析進行了研究。針對撲翼關鍵節點輸出運動軌跡,得到撲翼上下撲動軌跡為一段弧形,翼手收放軌跡為一個近似橢圓形,驗證了結構設計的合理性。由撲翼關鍵節點角位移曲線分析得到:撲翼上下撲動角大小約為55°,角位移曲線隨時間近似呈正弦運動規律變化,與大耳蝙蝠翅膀的撲動規律相吻合。1個撲翼收放動作時間約為7.5 s,翼尖角位移變化平穩且同步,有利于提高撲翼的機動性。
[參考文獻]
[1] 周林,張忠海,王建輝,等.撲翼飛行器的研究現狀與發展[J].兵器裝備工程學報,2022,43(8):44-54.
[2] 鐘耀鵬,吳際霖,林之善,等.一種雙段式撲翼仿生飛行器設計[J].機電工程技術,2021,50(S1):9-12.
[3] 王文軒.基于連桿齒輪機構的仿生撲翼飛行器設計[J].現代商貿工業,2017,38(1):187-188.
[4] 欒建舉,杜茂華.基于ADAMS的機械四連桿機構運動仿真分析[J].軟件,2020,41(2):162-165.
[5] 左惟煒,鄧援超,魏兵.MATLAB的平面連桿機構運動分析與動態仿真[J].湖北工業大學學報,2011,26(4):84-86.
[6] 余亮,韓芳,王鵬,等.局部閉鏈碼垛機器人運動學分析及運動控制系統設計[J].廊坊師范學院學報(自然科學版),2020,20(2):46-49+54.
[7] 王智森,范云波.行走機械腿部軌跡規劃及運動特性分析[J].黑龍江工業學院學報(綜合版),2023,23(1):79-84.
[8] 修星晨,朱洪俊,謝鐸,等.基于MATLAB與ADAMS對撲翼機構優化仿真分析[J].機械設計與制造,2017,55(S1):153-156.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
