全地形救援設備研究及發展趨勢
2024-08-05 00:00:00曾恩
企業科技與發展 2024年4期

摘要:全地形救援設備是一種能夠在多種事故及自然災害中快速進行救援的設備,被廣泛應用于探查、搜尋、救援等多個領域,可以有效縮短救援時間,提高救援效率,減少事故災害中的人員傷亡和經濟損失。文章分析當前國內外現有救援設備行走機構的設計及其應用場景,認為目前的救援設備適用范圍有限,并且在復雜工況下難以保證其操控的靈活度和精準性。因此,有必要采用遠程駕駛方式,將人的主動性融入救援設備中,以提升其應對復雜環境的能力。
關鍵詞:全地形;救援設備;遠程駕駛
中圖分類號:TP24" " " 文獻標識碼:A" " " 文章編號:1674-0688(2024)04-0100-03
0 引言
近年來,極端天氣事件頻發,導致災害的風險系數不斷提高,災害的復雜性日益加劇,每次事故災害的發生都帶來巨大的人員傷亡和財產損失。因為事故無法預測,救援面臨的是“全地域”“全災種”的綜合性救援工作,所以救援作業的區域存在較大的風險[1]。以天津港爆炸火災事故為例,遇難的165人中,有110名是救援人員[2]。目前,救援工作的難點在于災難和事故發生后,現場的具體情況不明確,阻礙了搜救工作的順利開展,而且傳統的救援設備需要現場操作,難以適應復雜多變的地形,使救援人員面臨巨大的安全風險。
現有針對救援機器人的研究主要聚焦于功能模塊搭載、智能算法優化、信息采集能力提升及救援設備結構性能改進等方面,但當前救援機器人仍存在防水和越障功能不足、移動和轉向不靈活、環境感知能力和智能算法水平不高等問題[3],在當前救援設備智能化水平較低的情況下,其無法自主完成搜救任務。因此,借助遠程駕駛技術操控救援設備,實現人機結合應用,是解決當前設備智能化水平不足的有效方式。遠程駕駛技術的應用對救援設備的適用性能要求很高,救援的情形有地質自然災害、火災、野外救援以及化學危險品災害,現場的地形包括陡坡、塌陷、崎嶇、狹窄等非結構化環境路況[4]。因此,研發一種能在全災種、全地形的環境中快速越障的行走機構和運動平臺,具有提高災害處置能力和救援效率、減少人員傷亡和經濟損失的重大現實意義[1,5]。本文梳理全地形救援設備的研究及發展趨勢,綜述當前救援設備的行走機構類型及應用場景,旨在為全地形救援設備的設計研究提供參考。
1 國內外研究現狀
1.1 國外救援設備研發與應用現狀
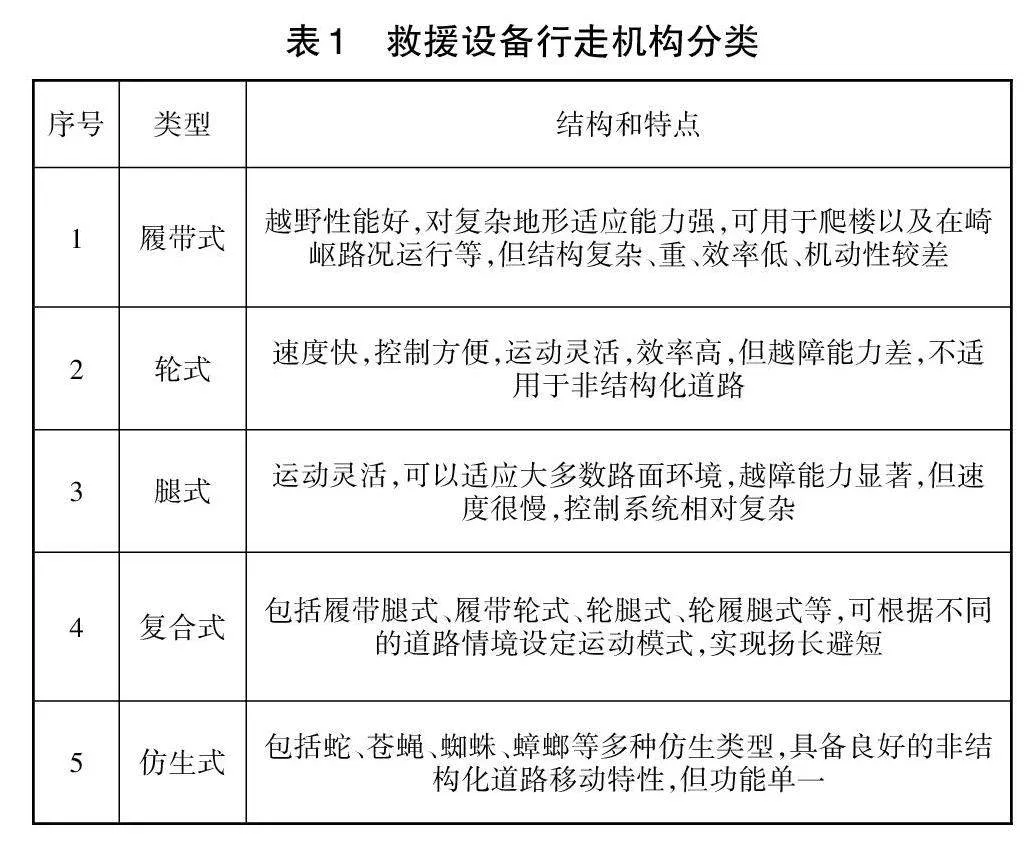
自“9·11”事件美國首次將機器人應用于搜尋幸存者,此舉引發了全球對救援設備重要性的認識。《時代周刊》報道,在此次救援中,救援機器人在10天內于狹小、危險的區域中搜救的遺體數量與人工搜救相當,但效率卻提高了1倍[6]。此后,救援設備的研發進入了快速發展階段。到目前為止,救援設備已經開發出多種類型,按照其行走機構的類型可以分為履帶式、輪式、腿式、復合式以及仿生式機器人,救援設備行走機構分類見表1。
國外應用救援設備較早,圖1(a)所示的履帶式救援移動裝備為英國奎奈蒂克公司北美分公司研制的魔爪軍用機器人,該機器人采用遙控控制方式,可以搭載多種組件,執行拆除簡易爆炸裝置、偵察等任務,其他履帶式移動救援設備還有美國Remotec公司研制的V2機器人,加拿大InvKtun公司研制的MicroVGTV機器人等[7]。圖1(b)所示的輪式救援移動設備為美國桑地亞國家實驗室智能系統和智能機器人研究中心研發的RATLLER機器人[8],該機器人采用的輪式行走機構,由4個驅動輪構成,具有較強的機動性能,行駛速度較快,可實現遠程控制,但其越障性能較差,只適合在平坦的地形中行駛,此類輪式移動救援設備還有美國卡內基·梅隆大學研制的Groundhog救援機器人等。圖1(c)所示的腿式機器人為東京工業大學的遠藤玄研制的四腿機器人,該機器人在崎嶇路面也能自由行進,還能上下臺階,在房屋坍塌的受災現場等非結構化路面上可自如行走,幫助搬運救援物資和執行現場搜救任務[9]。此外,卡內基·梅隆大學研制的八足機器人可以適應多種極限道路工況。圖1(d)所示的輪腿復合式機器人是美國波士頓動力公司研制的Handle機器人,其底部采用車輪的方式并在支撐處結合腿的方式進行運動,車輪的運動方式保證車輛能快速行進,兩輪的結構使其具有良好的轉彎性能,因其支撐的腿部關節的運動具有彈性,可保證機器人在上下坡時像人一般穩定行進[10]。圖1(e)所示的腿履復合機器人為美國維克那機器人公司研制的BEAR救護機器人,該款機器人將腿和履帶結合在一起,其履帶既可以起行走的作用,也可以改變機器人身軀的關節結構,實現類似于腿的動作,從而具備跨越不同地形的功能。其他復合式救援設備還有美國iRobot公司生產的Packbot系列機器人[11],該類型的機器人在兩邊的履帶上加上擺臂,擺臂可以將機器人支撐起來,從而實現跨越臺階的功能。圖1(f)所示為日本東北大學研發的仿蛇形機器人,該救援機器人采用振動馬達獲得動力,可根據空氣噴射的方式調整位置,其突出的優點是可以穿越狹窄的間隙[12]。其他的仿生式救援設備還有美國加利福尼亞大學設計的蒼蠅仿形機器人、蟑螂仿形機器人等。
綜上,國外救援機器設備的研發技術已經較為成熟,在機構方面的變形種類和拓展非常豐富,并且許多機器人已經開展應用,得到了良好的反饋。
1.2 國內救援設備研發成果與進展
國內研發救援設備相較于國外雖然起步較晚,但是研發成果也相當豐富。中國礦業大學長期對煤礦井下開采環境進行分析,研制了履帶行走的CUMT系列救援機器人,并在此基礎上,進一步優化機器人的視覺技術、智能控制系統、行走機構以及環境識別自主避障功能等,研發的救援機器人已經有較好的應用[3,8,13-14]。劉罡[15]研制多節串聯多履帶構型的救援機器人,對其結構特性和運動策略展開了研究。王繼斌[16]研究應用于地震廢墟狹窄空間中的救援機器人。孫霖[17]研究城市災害中攜帶救援臂的救援機器人,不斷拓展救援機器人的應用范圍以及功能。賈現軍[18]對救援機器人在水下調整姿態位置的方式進行仿真試驗研究,運用深度控制算法提高控制精度并減少了運行時的干擾。龍建成等[19]研制了可在水下進行救援的機器人,該機器人采用6個3葉螺旋槳作為動力,具備水下拍攝和人機交互功能,并且通過機械臂實現水下救援的目的。欒憲超等[20]研制了應用于廢墟環境的蛇形救援機器人,通過算法優化設備結構參數,使其具備良好的跨越臺階、溝壑的能力,并且減少了設備的運行誤差。寇彥蕓[21]對七自由度冗余機械臂進行運動學分析求解和仿真,提高了機械臂的負重功能和作業空間。國內學者對救援機器人的研究雖然具有良好的理論基礎,但是實際應用案例還較少,需要進行更多的實例驗證分析,才能更好地為救援、救災行動提供輔助。
2 市場預測和發展趨勢
2.1 救援設備發展趨勢與特征
近年來,國家對應急能力體系進行了全面的建設,先后推動實施了自然災害防治技術裝備現代化工程和安全應急裝備創新發展工程。高效精良的技術裝備是實施高質量科學救援的有力保障,加快推進搶險救災工程機械研發制造對提升應急救援能力具有重要意義。
從當前各種災難救援的現場情境和道路環境看,救援設備的發展趨勢更多地往智能化、輕型化、模塊化的方向發展,并具備通用化、多功能化的特征[1,4-5]。在國家政策的大力支持下,未來救援機器人的應用將拓展到水下、煤礦、自然災害、火災、化學危險物品、高層建筑等多個領域,研究內容既包括硬件技術上的傳感性能、結構設計、設備功能,也包括軟件技術上的智能算法、虛擬與現實技術結合、控制系統研發、定位導航等。
2.2 救援設備發展展望
在政策的推動下以及技術快速發展的推動下,救援設備的研發和應用將會得到更多的重視,對設備功能的要求也會不斷提高,研制一種能適用于全地形的救援車輛,對救援救災工作具有重大的現實意義,其市場空間必定廣闊。
3 結語
當前,救援設備的行走機構已經出現履帶式、輪式、腿式、復合式以及仿生式機器人等多種類型,其智能控制程度和相關分析理論也在不斷提升,但目前適用場景往往有限,一方面受制于行走機構對各種復雜地形的自適應能力,另一方面受制于復雜地形帶來感知運算的不確定性。因此,通過遠程駕駛的方式與全地形救援設備進行結合,可以有效應對非結構化地形的救援行動。
4 參考文獻
[1]薛凱,黎明.未來3~4年消防車輛及搶險救災工程機械面臨機遇期[J].商用汽車,2019(Z1):84-86.
[2]尤嵩菀,李功淼,沈同強.淺談無人化裝備在搶險救災中的運用——對兩起特大爆炸事故救援的反思[J].中國應急救援,2019(5):56-59.
[3]王勇.煤礦救災機器人井下可視導航技術研究[D].徐州:中國礦業大學,2018.
[4]張新,徐建華,陳彤,等.面向重大自然災害的救援裝備研究現狀及發展趨勢[J].科學技術與工程,2021,21(25):10552-10565.
[5]于振中,蔡楷倜,劉偉,等.救援機器人技術綜述[J].江南大學學報(自然科學版),2015,14(4):498-504.
[6]蘇衛華,吳航,張西正,等.救援機器人研究起源、發展歷程與問題[J].軍事醫學,2014,38(12):981-985.
[7]賈碩,張文昌,吳航,等.救援機器人研究現狀及其發展趨勢[J].醫療衛生裝備,2019,40(8):90-95,100.
[8]劉建.礦用救援機器人關鍵技術研究[D].徐州:中國礦業大學,2014.
[9]杜威.四足機器人步態設計與運動控制研究[D].南京:南京航空航天大學,2018.
[10]楊琨.液壓驅動四足機器人能耗分析、優化及動力系統研究[D].濟南:山東大學,2019.
[11]YAMAUCHI B M.Packbot:a versatile platform for military robotics[C]//Conference on Unmanned Ground Vehicle Technology VI;20040413-20040415;Orlando,FL;US,2004:228-237.
[12]王國彪,陳殿生,陳科位,等.仿生機器人研究現狀與發展趨勢[J].機械工程學報,2015,51(13):27-44.
[13]翟國棟,張文濤,岳中文,等.基于雙目視覺技術的煤礦救援機器人研究進展[J].煤炭科學技術,2020,48(7):206-217.
[14]李雨潭.多驅動煤礦救援機器人行走系統與驅動模式自適應控制研究[D].徐州:中國礦業大學,2018.
[15]劉罡.多節履帶式搜索機器人及其運動策略研究[D].哈爾濱:哈爾濱工業大學,2011.
[16]王繼斌.廢墟狹窄空間輔助救援機器人研究[D].哈爾濱:哈爾濱工業大學,2014.
[17]孫霖.攜帶機械臂的履帶救援機器人設計與仿真實驗研究[D].哈爾濱:哈爾濱工業大學,2020.
[18]賈現軍.小型水下救援機器人位姿控制及其在水下搜救中的應用[D].杭州:浙江大學,2014.
[19]龍建成,彭彬烘,田秀云,等.水下救援機器人的設計與實現[J].電子制作,2022,30(7):30-32.
[20]欒憲超,常健,王聰,等.主動關節履帶式蛇形救援機器人結構參數多目標優化設計[J].機器人,2022,44(3):267-280.
[21]寇彥蕓.救援機器人結構設計優化及其運動學與動力學研究[D].濟南:山東大學,2017.
