復雜環境下行車主動安全風險評估與決策控制算法
2024-08-24 00:00:00郭曉麗
汽車與新動力 2024年4期
關鍵詞:智能汽車;主動安全;風險評估;干預決策
0前言
截至2023 年12 月,我國機動車保有量達到4.35 億,其中汽車保有量達到3.36 億,汽車駕駛人數達到5.23 億[1]。2023年,我國全年道路事故萬車死亡人數為14.8[2]。主動安全功能因可提高行車安全、可為L2 及L3級自動駕駛舒適性行車功能提供更完備的安全支撐[3-4],越來越受到行業重視。相應的,車輛主動安全場景逐漸從單縱向追逐場景向多目標復雜場景(如復雜路口、超車、斜穿車輛等)發展[5],體現在國內外立法層面則如相關法規將多車輛路口場景列入主動安全評測范疇。
WANG 等[6]提出了一種交叉口碰撞預測方法,其利用車輛運動和周圍道路信息預測自車與其他目標的距離及碰撞報警級別,但該算法要求所有目標互相通信,且未考慮傳感器感知偏差的影響。PARK 等[7]將自動緊急剎車(AEB)和自動緊急轉向 (AES)系統進行集成,但其對感知性能依賴程度較高。祝琳等[8]僅研究了自車和目標車在直線行駛下的避撞。LAI 等[9]、裴曉飛等[10]提出了緊急制動橫縱向一體化避撞控制。上述策略均不支持實際交通中更復雜的場景,如Y 形或T 形路口。HILLENBRAND 等[11]提出了多級碰撞緩解方案,PATEL 等[12]基于Deep SORT 算法設計出實時人工智能(AI)檢測模型,王錕等[13]提出了基于實時軌跡檢測的交叉路口行人過街風險評估方法,上述研究均因算力消耗大而無法在車端部署。
綜上,國內外學者對智能車主動安全的研究仍較難產業化部署。主因是智能車主動安全仍存在感知硬件要求高、高度依賴車載傳感器感知性能等問題;此外,針對某幾個場景堆疊開發的算法,在復雜場景功能擴展困難,算力消耗大,實車應用部署挑戰大。針對上述問題,本文基于車輛及其他交通參與者的軌跡預測、避撞需求評估,設計了可支持復雜環境下車輛橫縱向避撞輔助風險評估及決策控制算法,實現了不同場景下車輛主動安全輔助駕駛。
1 基于碰撞風險評估的車輛避撞決策控制方法
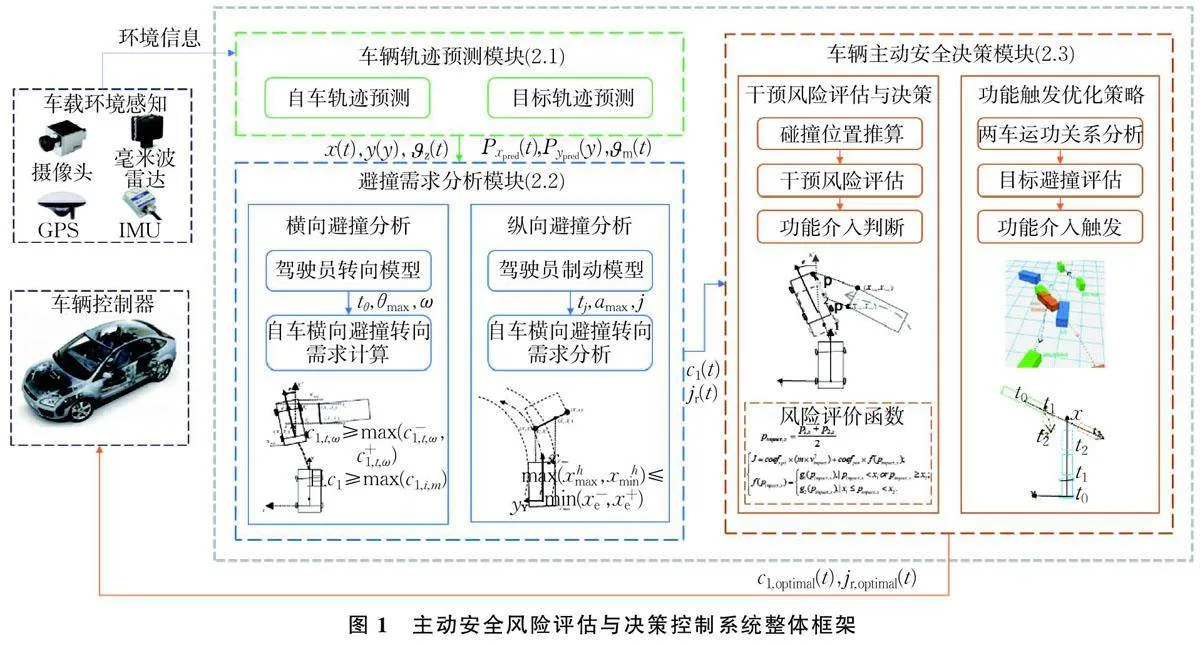
主動安全風險評估與決策系統的整體框架如圖1 所示。首先,基于上游感知結果(目標位置、速度、航向角等動態環境信息和車道線等靜態環境信息)對自車及其他交通參與者軌跡進行預測;在此基礎上,對自車縱向避撞控制所需加速度、加加速度和橫向避撞控制所需的方向盤轉角及角速度進行計算;最后,對主動避撞功能的干預形式及請求大小進行決策控制。
系統輸出為方向盤轉角或縱向加速度、加速度變化率。
1. 1 基于自車及目標車輛軌跡的避撞需求評估
對目標和自車運動軌跡進行預測時,從事故評測等價指標、駕駛員反應時間分布、主動安全評測法規要求及功能設計邊界4 個方面考慮,取系統預測時長為3.75 s,預測步長為0.025 s。以自車后軸中心為坐標原點,x 軸指向自車正前方向,y 軸指向自車左側方向,建立坐標系,采用長寬分別為各自長和寬的矩形框表示外輪廓,通過二自由度單軌模型對自車進行建模[14],基于當前狀態預測自車及目標車輛軌跡。從橫向避撞所需曲率及曲率變化率、縱向避撞所需加速度及加速度變化率、自車橫向避撞所需方向盤轉角及角速度等方面對碰撞風險進行評估。
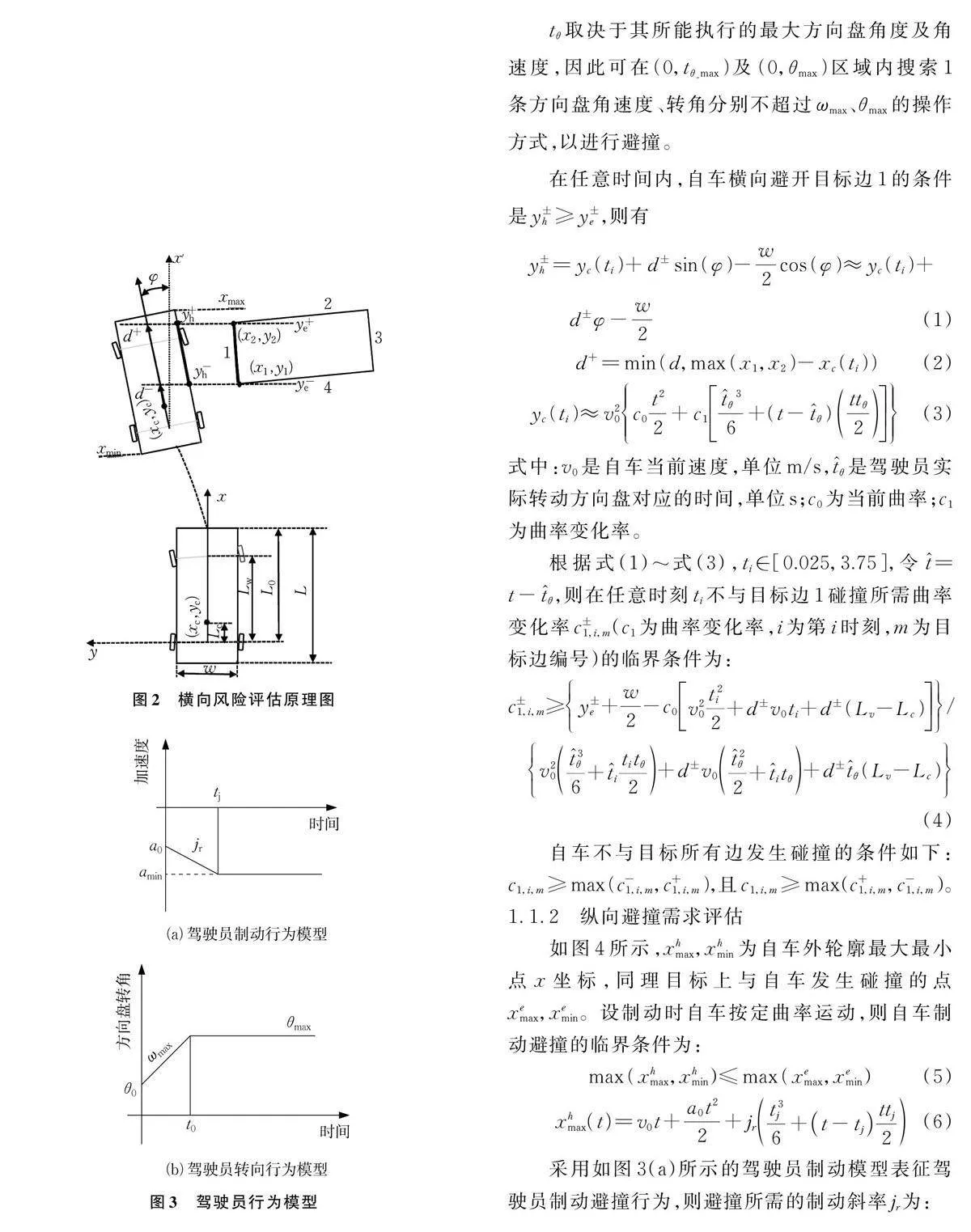
1. 1. 1 橫向避撞需求評估
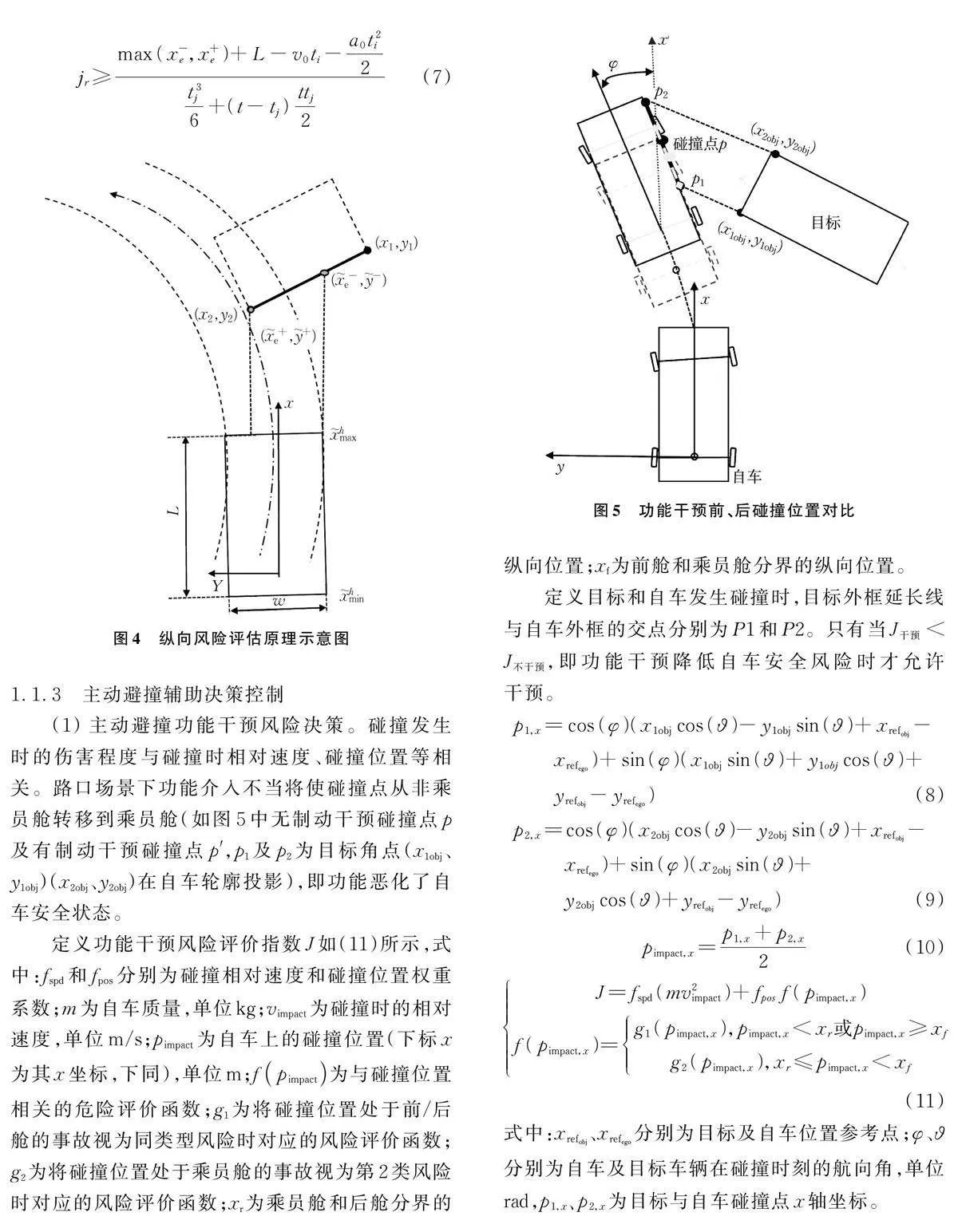
實際場景中駕駛員可打方向盤避讓,且一定車速下駕駛員的方向盤轉動輸入是一定的[15],因此若駕駛員在某一車速下對方向盤的轉動輸入超過設計值,則代表駕駛員認為當前交通場景是危險的,方向盤角度及角速度大小反映了駕駛員認為的危險程度。如圖2 所示,自車左轉向避讓右側目標的極限是不與目標邊1 發生碰撞。在緊急情況下駕駛員轉向行為模型[16-18]如圖3 所示。圖2 中各符號含義如下:φ 為自車航向角,單位rad;Lw、L0、L 為自車軸距、后軸到前保距離及車長,單位m;w 為車寬,單位m;Lc 為自車軌跡瞬時旋轉中心到后軸的縱向距離,單位m;xc、yc 為自車瞬時旋轉中心坐標;xi、yi為目標外輪廓點,i =1,2;上標+及-分別代表最大值和最小值;yh 為目標角點在自車對應邊的投影點;d 為yh 在x 軸的投影;ye 為目標上點在自車未來坐標系下的坐標。圖3(a)中,a0 及amin 為自車當前加速度及駕駛員最小減速度,單位m/s2;tj 是駕駛員制動建壓時間,單位s。圖3(b)中θ0 為方向盤初始轉角,單位rad;ω 是方向盤角速度,單位rad/s;tθ 是設計的駕駛員最大轉動方向盤的時間,單位s。
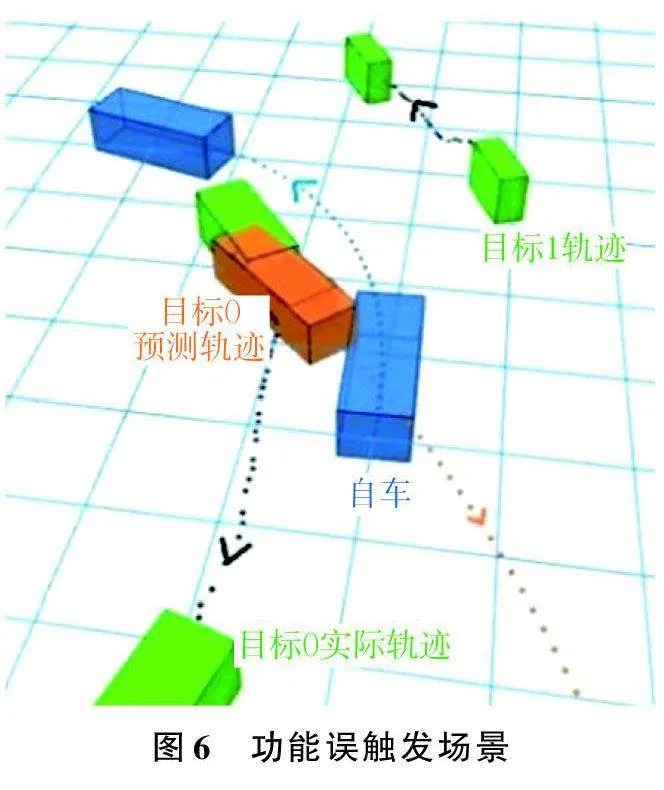
(2) 基于多目標交互博弈的主動安全功能誤干預優化。路口等環境下主車與其他交通參與者的行為瞬時多變,受傳感器本身性能限制,其輸出與目標實際狀態有不同程度的偏差及延遲,單目攝像頭方案下更明顯。以圖6 中某路口自車左轉、左前方目標右轉導致的主動避撞功能誤觸發為例,對多目標交互博弈策略進行說明。如圖6所示,藍色立方體代表自車,綠色立方體為其他交通參與者。自車左前方的綠色立方體為目標0 的實際軌跡,橙色線為目標0 的預測軌跡,該軌跡預示目標0 即將與自車碰撞,故功能進行了制動干預。
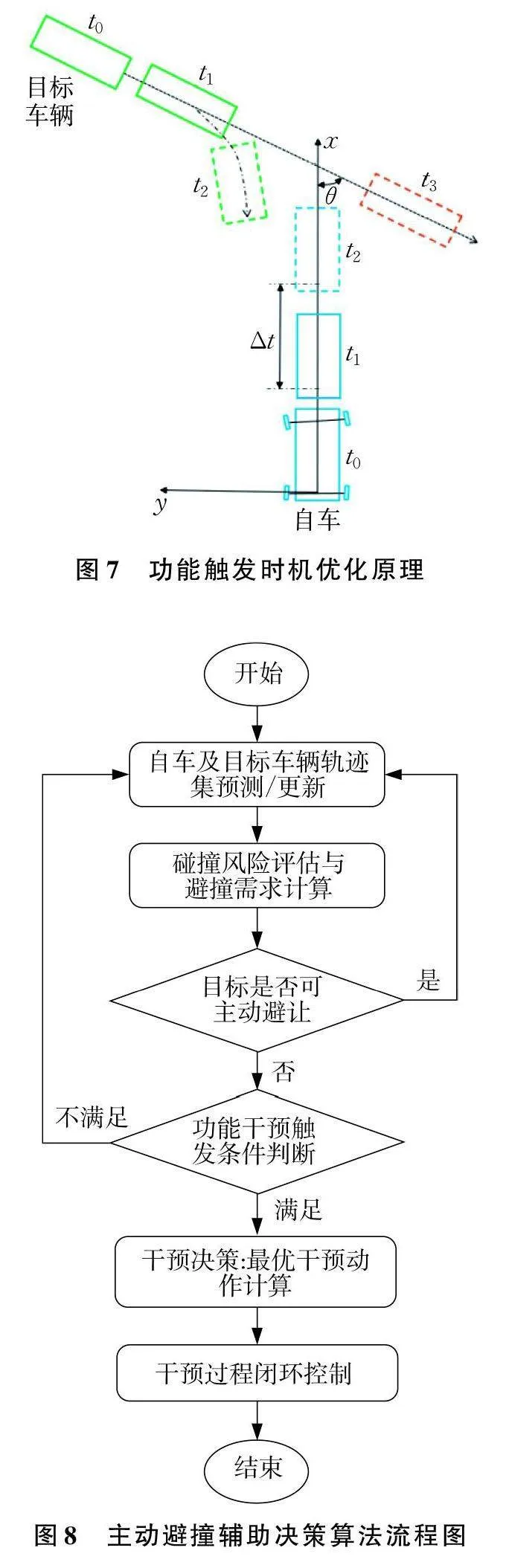
將自車與其他交通參與者的交互納入風險評估,對目標行為補充建模,用其可采取行為類型及烈度大小更新其預測軌跡。功能的優化原理如圖7 所示。其中,t0為當前時刻,t1為原主動避撞策略中功能觸發時刻,t 2為目標車按日常習慣可逃逸的時刻,t3為原主動避撞策略中功能預測的目標位置。t1 與t2 間的時間差Δt 即為可利用的動態時間窗口。在該窗口內,功能實時評估目標狀態,判斷其是否可逃逸,直至目標無法逃逸時才觸發自車的主動避撞功能。對軌跡預測、風險評估和功能決策3 大部分進行匯總,所提出的主動安全避撞輔助決策算法流程見圖8。
1. 2 主動避撞輔助測試分析
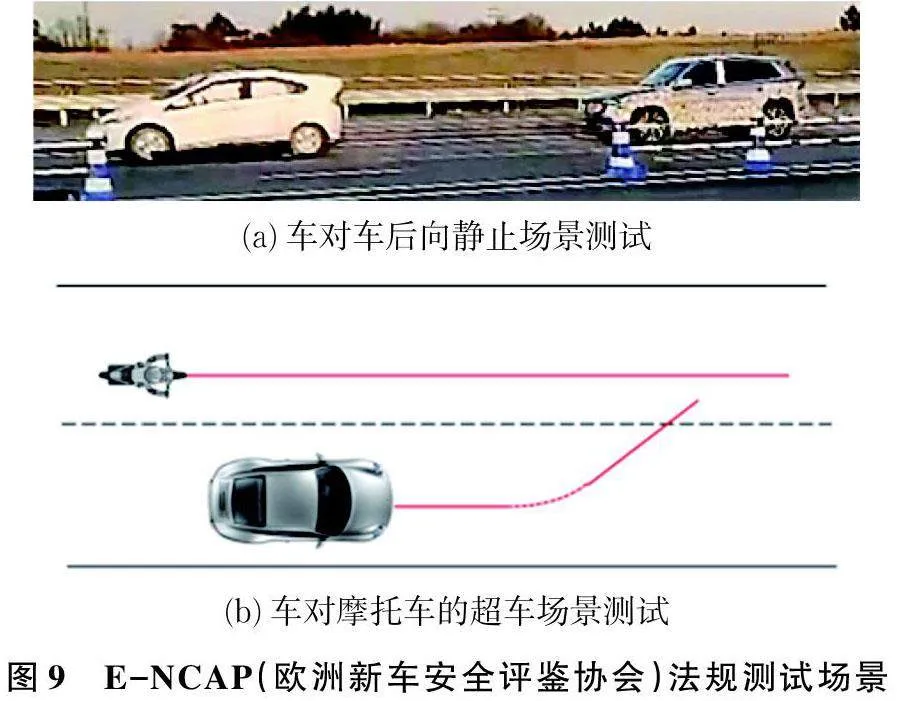
1. 2. 1 歐洲新車安全評鑒協會(E-NCAP)車對車靜止場景(CCRs)實車測試
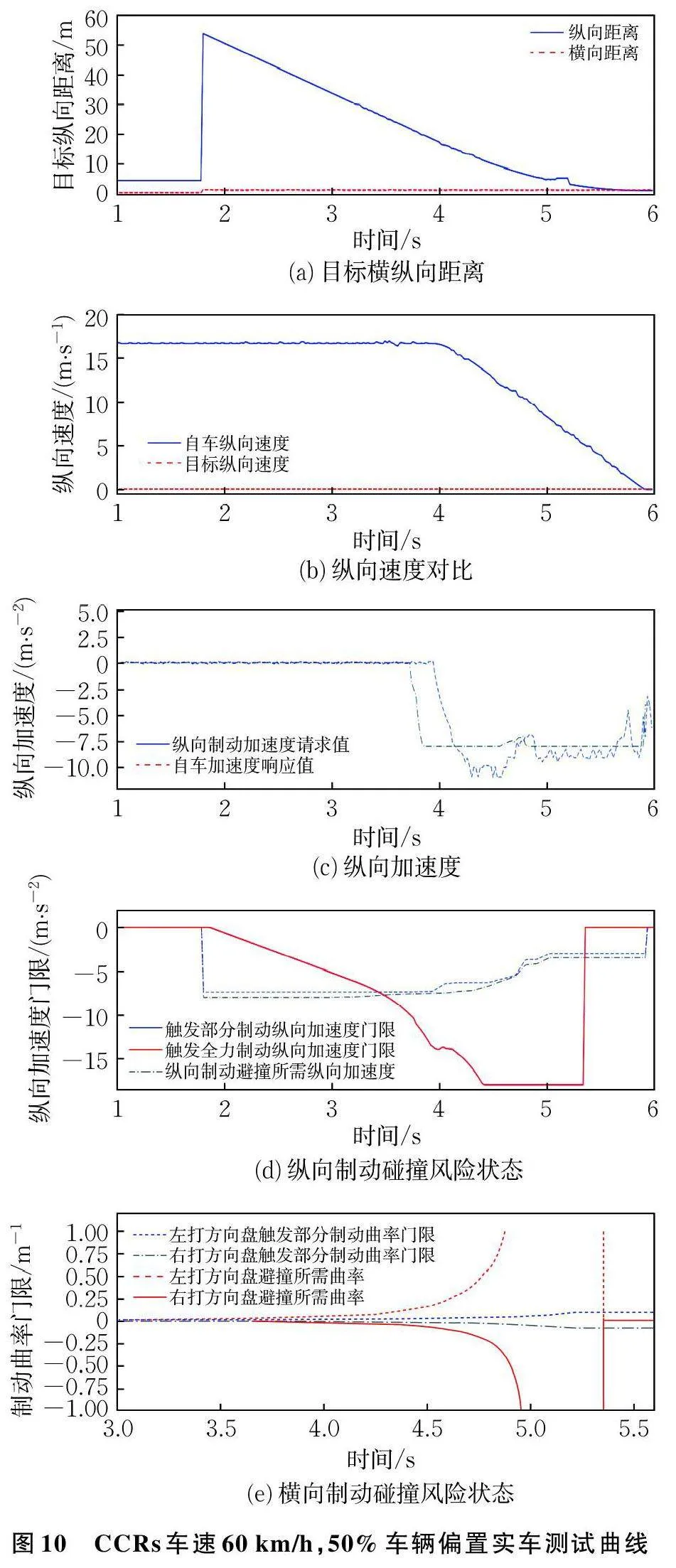
AEB CCRs 測試如圖9(a)所示,自車(即后方偽裝車)車速60 km/h、50% 車輛偏置追尾前方靜止白色車輛;車對摩托車的超車場景(CMovertaking)測試如圖9(b)所示。測試過程中,兩車間的距離、自車車速、自車橫向加速度、自車橫縱向風險值隨時間的變化如圖10 所示。
由圖10 可知,在3.5 s 時風險評估模塊計算的縱向風險值超過了全力制動限值,因此產生縱向碰撞風險。由圖10(b)可知,在功能干預過程中整車制動減速請求變化量小于0.78 m/s2,剎停時距前車的凈縱向距離約為0.5 m。該測試表明了所設計的主動安全避撞功能在E-NCAP CCRs 場景中的有效性。圖10(e)給出了橫向風險實時狀態,目標車輛在自車左前方50% 偏置,自車左轉避撞所需曲率大于右轉避撞所需曲率,3.7 s 時右轉避撞所需曲率滿足全力制動曲率限值后功能發出制動請求。
此外,該實車測試的芯片為英飛凌TC397,算法在50 Hz 的頻率下穩定運行。這表明該算法算力消耗低、可在實車控制器中實時穩定運行。
1. 2. 2 E-NCAP CMovertaking 測試
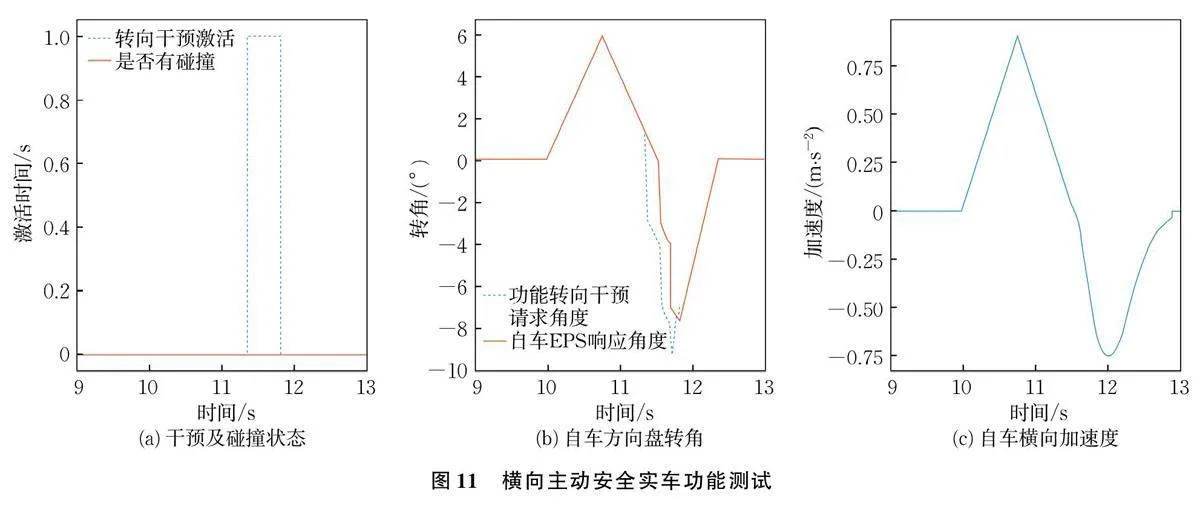
所設計的主動避撞功能還適用于橫向干預場景。如圖9(b)所示,以對摩托車的超車場景為例,該場景下由于自車向左侵入左車道且摩托車速度比自車快,因此所設計的算法采取橫向轉向干預的措施輔助自車橫向避撞。
主車及目標摩托車的瞬時狀態如圖11所示。在11.3 s 時目標車輛與自車的碰撞時間(TTC)為2 s,此時功能被激活并發送轉向干預請求角度到執行器,11.8 s 時自車成功返回車道中心(此時兩車橫向間距為2 m),干預退出。這表明了所設計主動安全避撞功能在橫向避撞場景中的有效性。
1. 2. 3 主動安全誤觸發優化仿真驗證
基于所提優化策略,用實測數據回灌驗證結果表明優化后未出現誤觸發,證明了所述博弈算法對解決誤觸發問題的有效性。
2 結語
本文提出車輛主動安全風險評估及避撞決策算法,同時支持主車橫縱向主動避撞輔助干預,避開了基于場景設計的傳統思想。根據實車E-NCAP CCRs 制動避撞測試、自車車道偏離與同向摩托車打方向避撞、公共道路誤觸發等不同測試,證明本文所提算法的算力消耗低,降低了對上游感知性能的依賴,所設計的功能觸發安全收益評價策略能夠保證功能觸發的安全收益,有效提高智能交通安全。
