基于GAN-GRU的電梯制動力矩預測方法
2024-08-28 00:00:00蘇萬斌江葉峰易燦燦徐彪
機械制造與自動化 2024年2期
關鍵詞:電梯

摘"要:電梯制動器的制動力矩是影響電梯運行安全的關鍵參數,利用深度學習算法對其進行預測,能為電梯的安全使用和后期維保提供重要參考。基于門控神經網絡(GRU)預測模型,結合生成對抗網絡(GAN)的基本思想,以1D-CNN作為鑒別器,提高電梯制動力矩預測模型的泛化能力。利用實驗數據進行訓練,獲得的預測結果方均根誤差為1.024 4,并與常用的時間序列分析模型如GRU、LSTM等進行對比,結果表明:所提出的方法在電梯的制動力矩預測精度上具有明顯的優勢。
關鍵詞:電梯;制動力矩;時間序列分析;生成對抗網絡;門控循環神經網絡
中圖分類號:TH17""文獻標志碼:A""文章編號:1671-5276(2024)02-0050-06
Prediction Method of Elevator Braking Torque Based on GAN-GRU
SU Wanbin1, JIANG Yefeng1, YI Cancan2, XU Biao2
(1. Jiaxing Special Equipment Inspection and Testing Institute,Jiaxing 314050,China;
2. Wuhan University of Science and Technology,Wuhan 430081,China)
Abstract:The braking torque of elevator brake is a key parameter affecting the safety of elevator operation. Deep learning algorithm is used to predict it, which can provide an important reference for the safe use and subsequent maintenance of the elevator. Based on the Gated Neural Network (GRU) prediction model, this paper combines it with the basic idea of Generative Adversarial Network (GAN), and uses 1D-CNN as the discriminator to enhance the generalization ability of the elevator braking torque prediction model. The experiment data is applied for training to abtain the prediction result with the root mean square error indicating as 1.024 4. Comparison is conducted with commonly used time series analysis models such as GRU and LSTM, and the results show that the proposed method has obvious advantages in the prediction accuracy of elevator braking torque.
Keywords:elevator;braking torque;time series analysis;generate adversarial network;gated recurrent neural networks
0"引言
電梯已被廣泛安裝在如大型工廠、政府機關、居民小區、商場等場合。截至2021年底,全國電梯保有量達到879.98萬臺,其中老舊電梯約占總數的5%,3年后,將增至8%,其中使用鼓式制動器的低速電梯仍為主流[1]。制動器作為電梯最重要的安全部件,其可靠性至關重要。制動器性能的重要指標是制動力矩,當制動力矩不足時,制動器難以對電梯進行有效制停,極易導致嚴重的人員傷亡與財產損失[2]。2010年至2021年,全國因制動力矩不足造成的電梯事故超過18起,造成的人員傷亡超過27人。例如,2021年5月23日,廣東湛江市某小區內,因制動器故障導致電梯發生沖頂,造成一人死亡,其原因在于電梯的制動力矩隨電梯的使用時間而逐漸降低,最終無法滿足電梯的制動安全要求[3]。
現有關于制動器力矩的研究主要在如何有效、準確地檢測出制動力矩,主流方法為在制動狀態下對制動器施加轉矩,直至制動輪剛好發生滑動,測出當前的力矩定義為最大靜載荷旋轉力矩,即所測制動器的最大制動力矩[4]。這種方式能直觀有效地檢測出電梯的實際力矩,但也不可避免地對電梯的制動性能產生負面影響。鼓式制動器的制動輪與制動閘瓦產生相對滑動,會對制動閘瓦造成極大的消耗,降低制動器的制動性能[5]。綜上,盡管電梯制動器的制動力矩是電梯安全評估的重要參考指標,但在實際的檢測維護中很難對其進行趨勢預測。因此,如何有效檢測電梯的制動力矩并對其退化狀況進行預測,從而避免制動器故障導致的事故發生是當下研究的熱點。目前,梁慶海等基于 Gamma 過程實現了制動器磨損退化預測[6];季景方等利用回歸分析實現盤式制動器制動溫度預測[7]。以上研究表明針對制動器進行時序預測以提高安全性是可以實現的。
當前的時序預測方法中,如支持向量回歸(support vector regression,SVR)等傳統機器學習方法能擬合數據間的非線性關系,但難以考慮多因素的影響,面對復雜度較高的電梯制動性能退化問題時效果較差[8]。回聲狀態網絡(echo state network,ESN)具有很快的運行速度,可以進行高效的預測,然而預測精度較低,同時在小樣本上效果不佳[9]。電梯制動力矩的數據采集問題導致無法獲取大量數據,采樣間隔大,因此不適宜用ESN進行預測。循環神經網絡(recurrent neural network,RNN)是用于處理時序問題的深度神經網絡,在時序問題如交通流預測上取得了較好的效果,其改進模型門控神經網絡(gated recurrent unit,GRU)通過門系統建立數據前后端聯系,通過很少的計算量提升了模型性能,具有優秀的數據挖掘能力[10-11]。然而,作為遞歸神經網絡的一種,進行序列預測時,較早預測數據的誤差會對后續的預測產生干擾,影響預測的精度。神經網絡的梯度反向傳播特性可以在訓練時提高模型的精度,增強模型性能,但在預測時卻無法實現[12]。而生成對抗網絡(generative adversarial networks,GAN)具有類似的思路,即通過生成器產生結果,鑒別器進行判斷,雙方對抗以達到納什均衡,從而使生成器與鑒別器都獲得最佳性能[13]。在時序預測任務上,同樣可以利用生成對抗網絡的思路,加入強大的鑒別器以對模型預測進行監督,提升預測精度。
考慮到電梯制動力矩時序預測的特性,由于其運行、制動狀況存在極大的隨機性,受人為因素干擾嚴重,很難直接捕捉數據間的時序信息。針對使用越來越廣泛的民用低速電梯,為實現全方位精確地預測電梯制動力矩,本文提出了基于GAN-GRU的電梯制動力矩預測方法。首先采集電梯制動實驗下的制動平均減速度、制動距離、運行總距離及制動力矩以反映電梯實際的運行狀態,之后利用GRU對制動力矩進行多因素的時間序列預測,最后結合GAN生成對抗思路,使用CNN對預測結果進行精確度判別以解決時序模型的預測誤差累積問題。本文使用電梯制動性能試驗機采集具有不同運行狀態的制動器數據,在進行歸一化后利用多種算法對制動力矩進行預測,驗證了本文所提出模型的準確性,為提高電梯的使用安全提供了新的技術手段。
1"理論與算法
1.1"GRU網絡模型
門控神經網絡GRU是基于LSTM的一種改進循環神經網絡模型。其將LSTM模型中的門系統整合為一個,極大簡化了計算量并提高了模型性能。數據的特征儲存在隱藏狀態中經過門系統不斷更新,實現對序列數據的學習[14]。
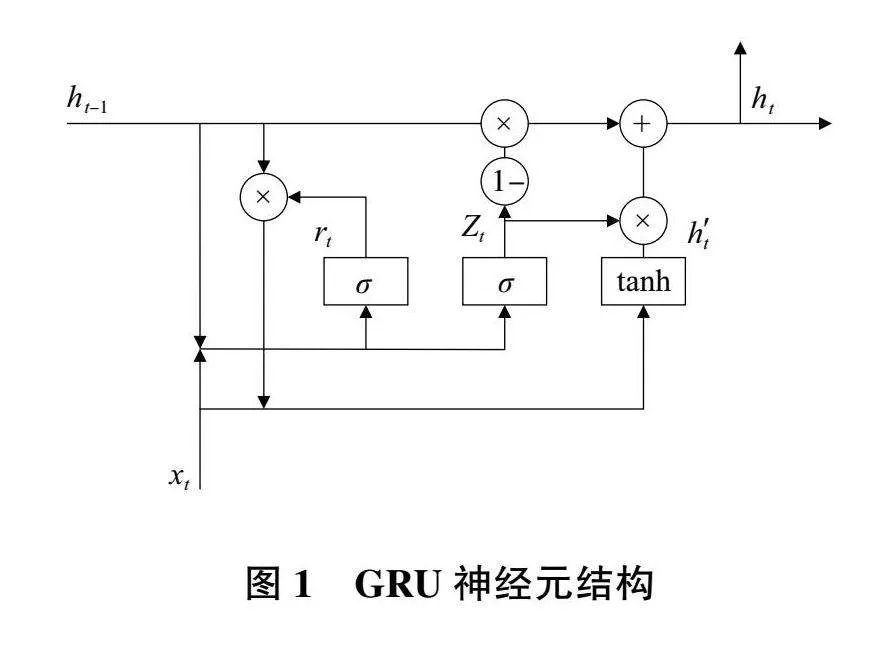
GRU神經元的結構如圖1所示,其利用更新門與重置門結構處理時序信息,二者均由sigmoid函數構成。通過函數對前記憶狀態信息與當前輸入的數據進行函數變換,實現數據信息篩選。相對于傳統LSTM,其主要發展在于將LSTM中的遺忘門和輸出門整合為一個更新門限Zt,并將LSTM中的網絡記憶合并至隱藏狀態中輸出。因此使得GRU模型具有更少的參數,降低了計算量,減緩了過擬合的問題,提高了模型性能。
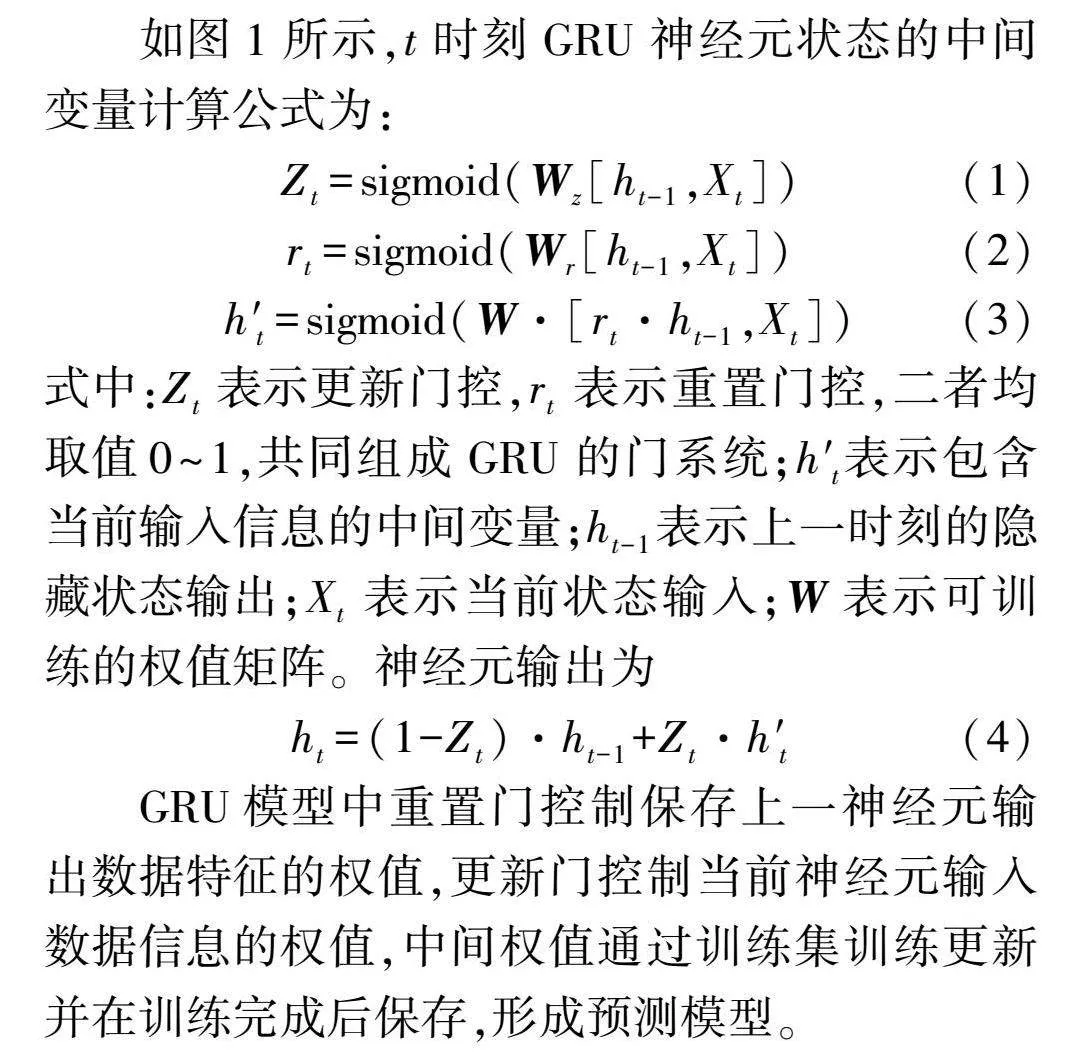
如圖1所示,t時刻GRU神經元狀態的中間變量計算公式為:
Zt=sigmoid(Wz[ht-1,Xt])(1)
rt=sigmoid(Wr[ht-1,Xt])(2)
h′t=sigmoid(W·[rt·ht-1,Xt])(3)
式中:Zt表示更新門控,rt表示重置門控,二者均取值0~1,共同組成GRU的門系統;h′t表示包含當前輸入信息的中間變量;ht-1表示上一時刻的隱藏狀態輸出;Xt表示當前狀態輸入;W表示可訓練的權值矩陣。神經元輸出為
ht=(1-Zt)·ht-1+Zt·h′t(4)
GRU模型中重置門控制保存上一神經元輸出數據特征的權值,更新門控制當前神經元輸入數據信息的權值,中間權值通過訓練集訓練更新并在訓練完成后保存,形成預測模型。
1.2"CNN網絡模型
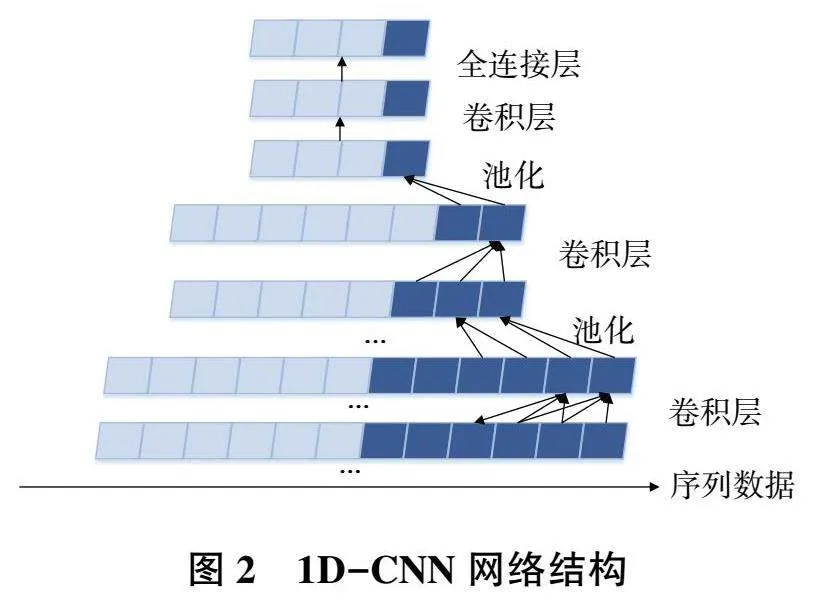
卷積神經網絡是可靠的分類器,在圖像與信號的分類上都有很好的效果。一維卷積神經網絡(1D-CNN)利用卷積核與序列信號進行運算,通過全連接分類器進行分類,可以實現高效可靠的分類[15]。CNN與傳統神經網絡相比,通過卷積核權值共享極大降低了計算量,同時卷積核可以提取高維特征,對數據進行更細致的區分。卷積神經網絡結構如圖2所示。
圖2"1D-CNN網絡結構
1)池化層:對特征進行降采樣,篩選出更優價值的信息同時減少計算量。
2)卷積層:通過卷積計算進行特征的提取,本文使用帶有3層卷積的模型進行特征提取,結合池化使最終輸出能包含輸入序列的全部特征。
3)全連接層:用于整合提取的特征信息并進行分類,輸出預測結果的可靠性判斷。
輸入的分布特征向量按照下式計算。
hki=fa[(Wk·d′)i+bk](5)
式中:hki是指第i個分布特征向量在第k層進行卷積運算后的值;fa是激活函數;Wk是該層的權重值;bk是對應的偏置值。
卷積神經網絡CNN對GRU的預測數據進行判斷,當置信度較低時,可返回生成器重新生成,以此監督生成器預測,緩解預測誤差累積,提高預測精度。
1.3"基于GAN的電梯制動力矩預測模型
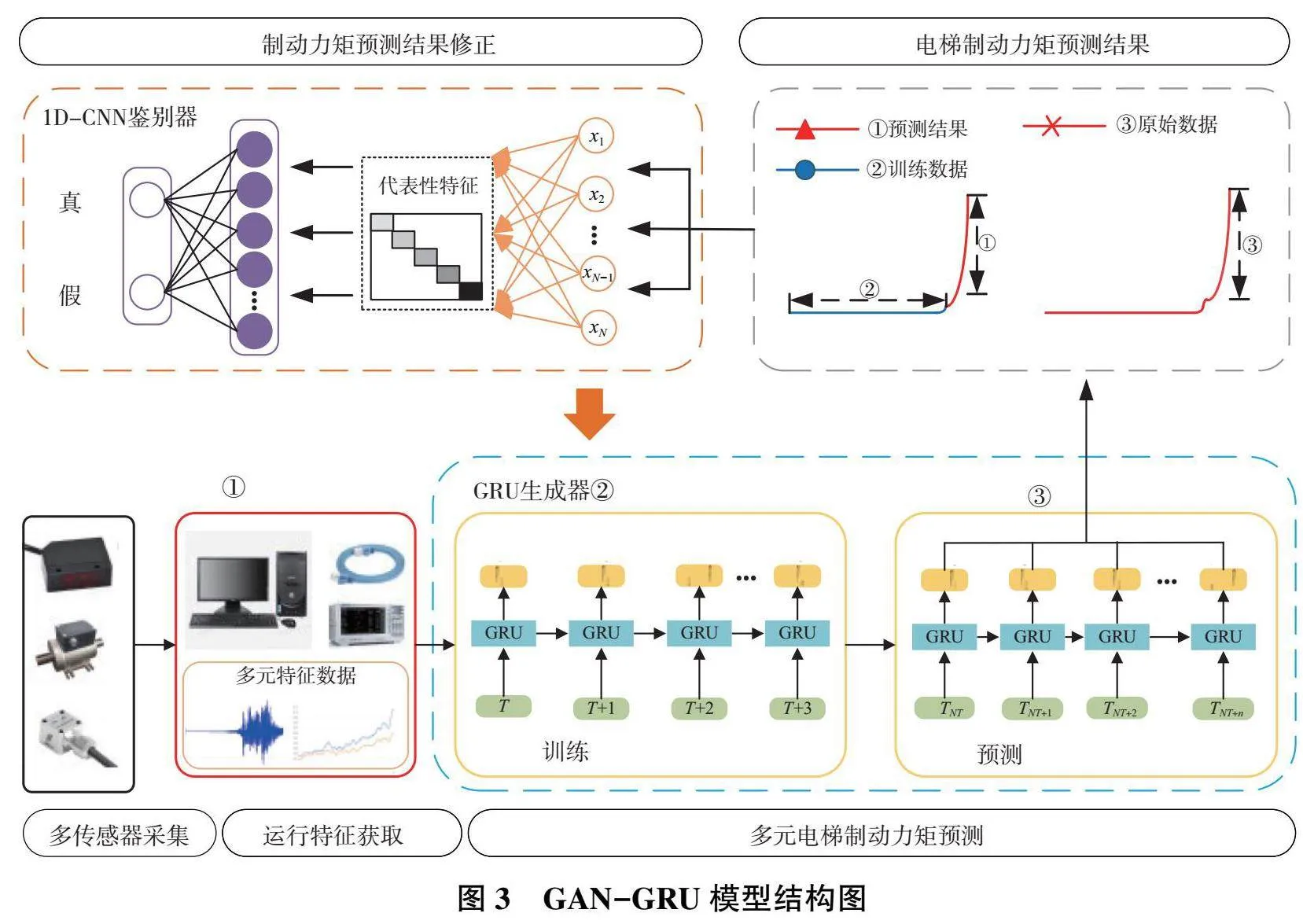
針對時間序列預測模型存在預測誤差累積的問題,提出結合生成對抗網絡(GAN)思想的GRU預測模型。GAN由生成器G和鑒別器D在對抗過程中同時訓練。首先,從已知概率分布中采樣噪聲向量Z。G將噪聲向量Z作為輸入,并進行訓練以生成分布遵循原數據的樣本[16]。另一方面,D被優化以區分生成的數據和真實數據。本研究以GRU預測模型作為生成器,通過不斷預測生成不同的預測結果,將預測錯誤的序列信息作為負樣本,預測正確的作為正樣本,將所有樣本對CNN進行訓練并判別是否屬于正確預測結果曲線,具體如圖3所示。
如圖3所示,GRU通過訓練集T"生成預測序列P~,以此作為生成器用來生成預測數據曲線,1D-CNN網絡則對GRU提供的P~生成相應的置信度標簽D(P~)∈[0,1],D(P~)∈[0,1]意味著P~符合預測要求,即當訓練集T已知時,預測集P的條件概率應該如下定義:
p(PT)=p(xm+1,…,xnx1,…,xm)=
∏n-mi=1p(xiT,xm+1,…,xi+m)(6)
為了最小化預測誤差疊加問題,考慮到權重、偏置等內部參數的影響,利用上述條件概率來獲得最優的參數,采用以下公式:
θ*=argmax∑n-mi=1log p(xiT,xm+1,…,xi+m;θ)(7)
式中θ代表模型的所有內部參數。
對于1D-CNN來說,目的是在對抗訓練中判斷P~是來自真實的數據還是生成模型GRU,直到無法判斷真假,此時GRU則能生成出最符合真實數據分布的預測曲線,1D-CNN作為鑒別器,其目標函數可以化為如下所示的損失:
LD(y,D(P~))=-1m∑mi=1(y(i))log(D(P~i))+
(1-(y(i))*log(1-D(P~i)))(8)
式中:m表示輸入序列中的樣本數;y(i)和D(P~i)分別表示真實標簽和判別標簽。訓練的最終目標是最大限度地減少對數似然,如下式:
min imizing:L(PT)=Ex~P(P)logp(PT)+
Ex~P(T)log(1-D(G(P)))(9)
式中:E表示數學期望;G(P)、D(G(P))分別為生成器的生成序列與鑒別器的判別概率。
L(PT)的值越小則說明生成器生成的預測數據更真實,置信度更高,更符合要求,否則鑒別器會讓生成器返回修改,并進一步降低L(PT)的值,最后滿足納什均衡。
2"實例分析
2.1"數據來源
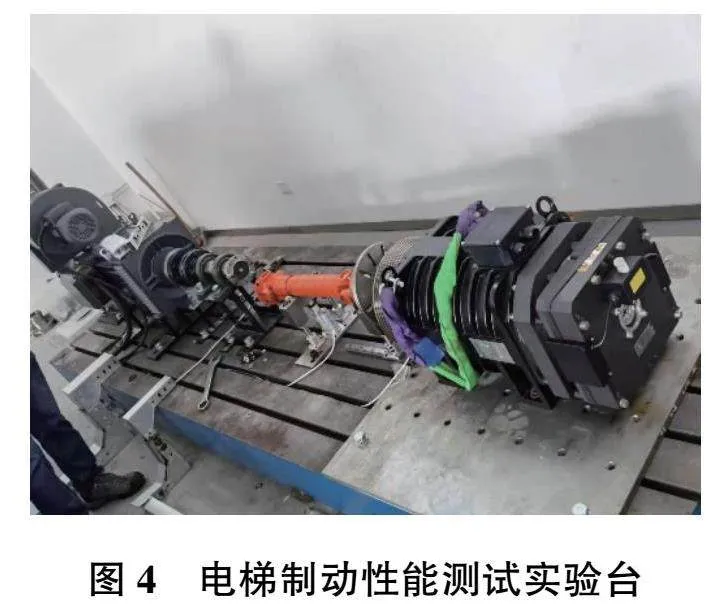
本文數據通過實驗室環境下搭建的實驗平臺采集獲得。實驗臺由控制系統、臺架、加載電機、制動器及速度和距離等傳感器組成,如圖4所示。由加載電梯模擬電梯轎廂運行而產生的轉矩力,經過減速傳感器模擬電梯轎廂的運行速度,通過制動器抱閘制停并以轉矩轉速傳感器等測量制動器的制動力矩與制動距離。利用速度傳感器記錄實驗模擬的運行速率、制動平均減速度等,距離傳感器記錄制動器的閘瓦間隙。整個實驗過程按GB/T24478—2009《電梯曳引機》和TSGT7007—2016《電梯型式試驗規則》標準進行。
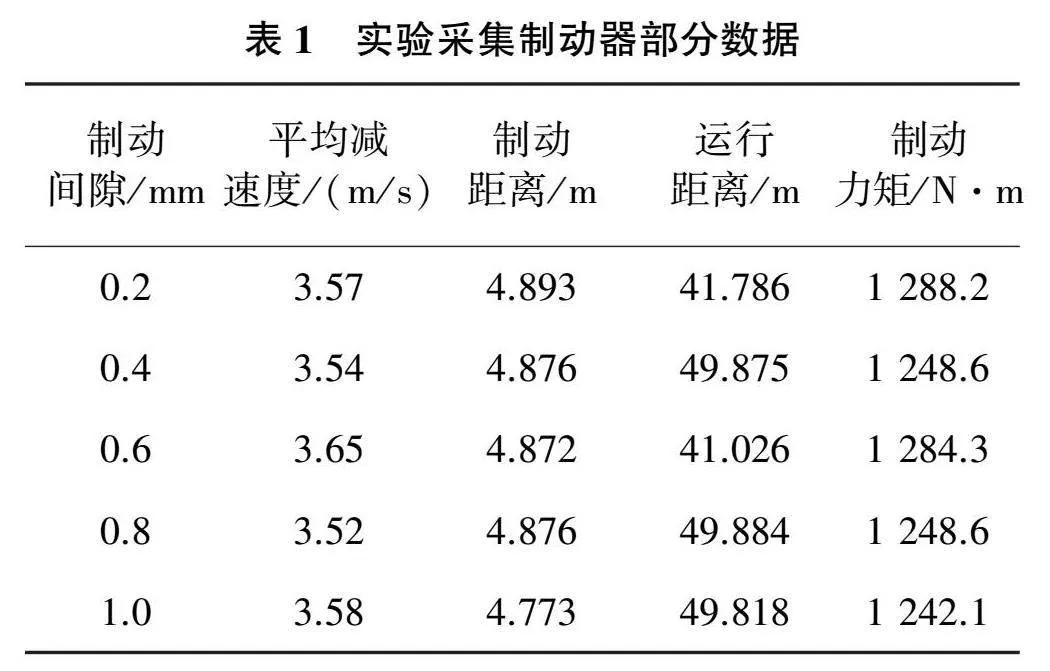
在電梯的運行過程中,閘瓦片與制動輪通過摩擦制動,往往會產生較大的摩擦磨損。磨損及結構松動產生的閘瓦間隙變化是電梯制動器結構中變化最大的部分。間隙增大會導致壓力角變化,也會增加電梯的制動時間,是影響制動器性能的關鍵參數。為了更好地觀察制動力矩在制動器退化過程中的變化,實驗通過調整制動閘瓦間隙模擬電梯使用中的閘瓦磨損,間隙從0.2mm遞增調整至1.8mm,每次增加0.2mm。隨著間隙增大,閘瓦受到的摩擦損傷同樣增加,從而模擬現實中電梯閘瓦片厚度與表面摩擦狀態的損失情況。考慮到實際電梯維護中難以進行大量實驗測量,在實驗機上進行45次實驗,利用轉矩轉速傳感器、速度傳感器、距離傳感器等采集獲得實驗條件下制動的制動力矩、平均減速度、制停距離、運行總距離等參數。其中制動力矩是電梯安全評估的關鍵參數,也是本文需要預測的目標;制動間隙是影響制動力矩的一大因素;制動距離、平均減速度是隨制動力矩變化而變化的參數;運行距離是實驗條件,與實驗時電機的速率等參數相關。部分數據如表1所示,使用其中前40組作為訓練集,后5組作為測試集,分別使用GAN-GRU、GRU、LSTM、ESN算法對數據進行分析預測,以驗證本文所提出的模型在電梯制動力矩預測上的優勢。
1 242.1
2.2"模型預測
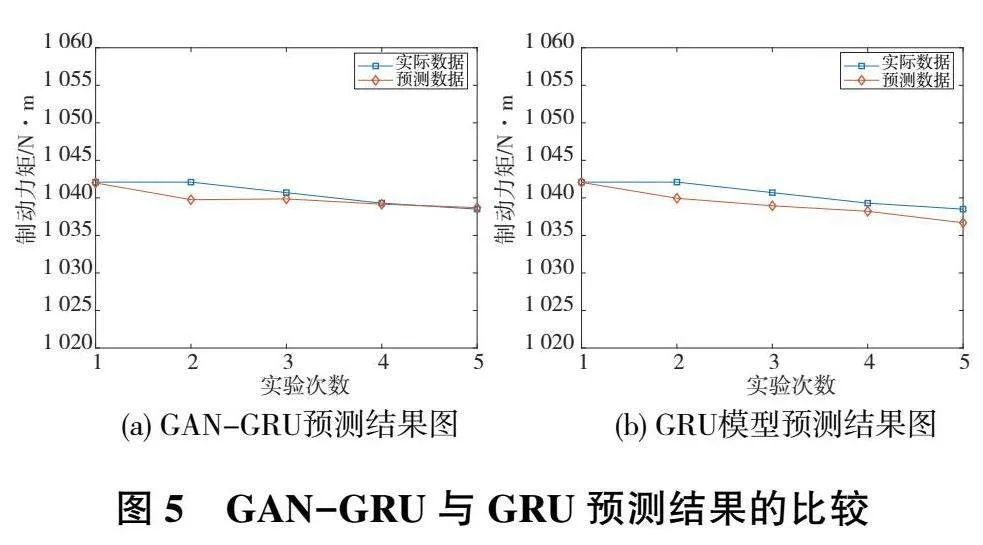
設定GAN中生成器GRU的參數為:學習率0.000 1,訓練次數100,神經元個數100。設定GAN中鑒別器1D-CNN的參數為3層卷積層,2層池化層,使用Relu作為激活函數,使用3×3尺寸卷積核,輸出使用Softmax進行二分類。同時,利用預測結果的方均根誤差RMSE與平均絕對百分誤差MAPE量化模型預測精確度。本文分別利用GAN-GRU與原始GRU進行預測,所使用GRU的參數一致,其預測結果如圖5所示,計算得GAN-GRU模型的RMSE值為1.024 4,MAPE值為0.054 7。相對于原始GRU模型的RMSE值為1.561 5,MAPE值為0.131 5,使用CNN作為鑒別器的GAN-GRU模型具有近30%預測精度的提升。
由圖5也可以看出,本文提出的方法在針對電梯制動力矩進行多步時間預測時,具有很好的預測效果。在誤差出現后也能對后續的數據產生不錯的預測結果,預測結果與實際結果幾乎一致,證明結合GAN生成對抗思路的預測模型在電梯時序數據預測上具有一定的優勢。
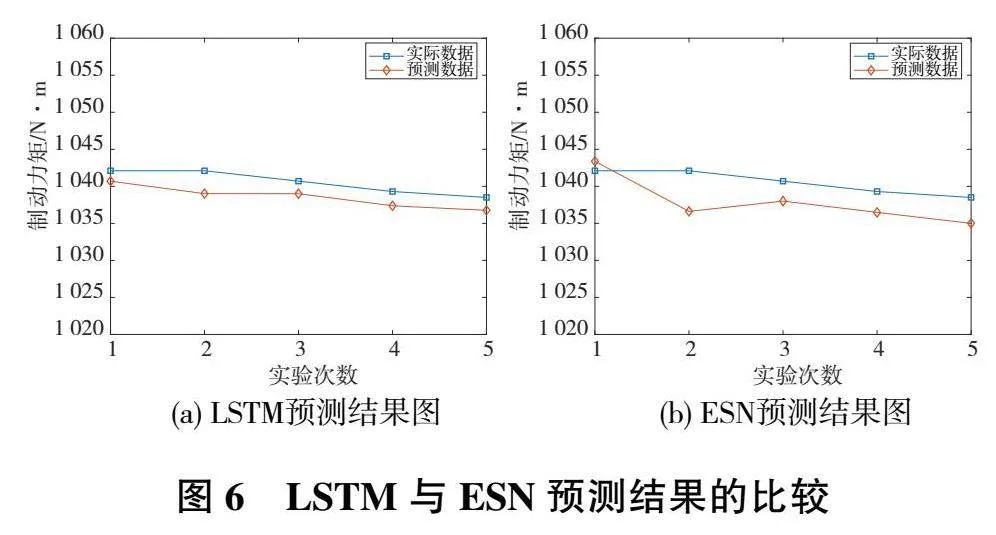
為了驗證模型的優越性,使用LSTM與ESN構建預測模型進行橫向對比,如圖6所示。LSTM使用參數同上文實驗中的GRU參數。ESN設定儲備池數量為300,稀疏度為5%,儲備池譜半徑設為0.8,計算得到的預測結果如圖6(b)所示。
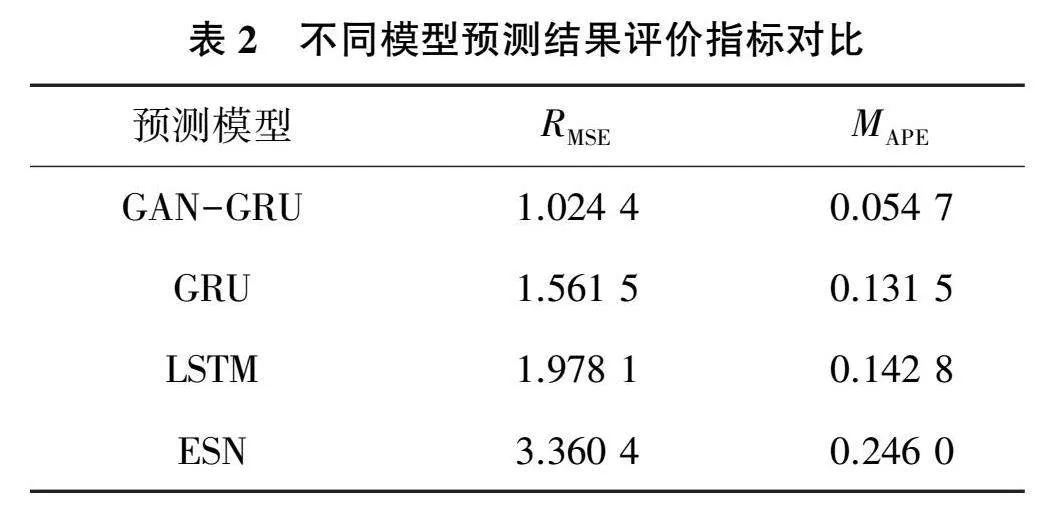
由圖6可知,相對于回聲狀態網絡預測模型,LSTM的預測結果更好,主要在于初始預測時存在一定誤差,影響后續預測效果,而ESN網絡對電梯制動力矩的預測效果更差,可信度更低。為更直觀對比各模型的預測效果,分別計算各模型的方均根誤差 RMSE與平均絕對百分誤差MAPE,如表2所示。由表2可以看出,本文提出的GAN-GRU模型具有更好的預測精度和模型泛化能力,可以用于電梯制動力矩數據的預測分析。
3"結語
針對曳引式電梯制動力矩退化影響電梯安全而難以進行診斷與預警這一問題,本文在門控神經網絡GRU的基礎上,結合生成對抗網絡GAN的思路,利用GRU作為生成器生成預測結果,再利用卷積神經網絡CNN作為鑒別器進行結果可靠性判斷,迭代訓練提高最終預測結果的精度。GAN-GRU具有更良好的預測效果,生成對抗學習的思路有利于緩解時間序列多步誤差中的誤差累積問題,CNN針對數據整體進行可靠性判斷,因此即使出現誤差,模型依然可以對后續的預測進行校正,因而整體預測精度更高。
本文利用自制的電梯制動性能實驗平臺獲取原始數據,通過模擬現場環境,改變閘瓦間隙獲取45組數據,并分別利用GAN-GRU、原始GRU、LSTM、ESN網絡模型對數據進行學習預測。結果表明:在電梯的制動力矩預測任務上,GAN生成對抗思路能提升GRU的預測效果接近30%,預測精確度相較于最常用的長短期記憶網絡LSTM高出近50%。這表明本文所提出的模型在電梯制動器的力矩預測上具有一定的優勢,可以為電梯的檢測與維護提供參考。
參考文獻:
[1] 葉偉. 基于AHP和熵權法的電梯安全綜合評價[J]. 標準科學,2022(6):112-116.
[2] 陳向俊,傅軍平,陳棟棟,等. 基于極端梯度提升回歸模型的電梯鋼絲繩磨損預測方法[J]. 機電工程,2022,39(4):554-560.
[3] 蘇萬斌,江葉鋒,陳啟銳,等. 基于Abaqus的電梯制動器制動輪熱應力分析[J]. 新技術新工藝,2021,404(8):43-48.
[4] 鄧林,吳曉軍. 電梯制動器溫度與制動力的影響因素分析[J]. 起重運輸機械,2020(9):51-54.
[5] 郝家琦,徐金海,鮑超超,等. 基于VMD與SVM的電梯鼓式制動器故障診斷研究[J]. 機電工程,2022,39(1):112-119.
[6] 梁慶海,賈希勝,白雲杰. 基于Gamma過程的制動器磨損退化建模與剩余壽命預測[J]. 公路與汽運,2021(5):1-5.
[7] 季景方,張建輝,范佳能,等. 基于回歸分析理論的盤式制動器制動溫度預測研究[J]. 汽車實用技術,2019(18):75-77.
[8] 顧昕雨,肖志剛. ARIMA-SVR組合模型在衛星遙測參數預測中的應用[J]. 空間科學學報,2022,42(2):306-312.
[9] 琚垚,祁林,劉帥. 基于改進烏鴉算法和ESN神經網絡的短期風電功率預測[J]. 電力系統保護與控制,2019,47(4):58-64.
[10] 孟海寧,童新宇,石月開,等. 基于ARIMA-RNN組合模型的云服務器老化預測方法[J]. 通信學報,2021,42(1):163-171.
[11] 楊芮,徐虹,文武. 基于EEMD-GRU網絡模型的短期風速預測[J]. 計算機系統應用,2022,31(6):231-237.
[12] 竇勇敢,袁曉彤. 基于隱式隨機梯度下降優化的聯邦學習[J]. 智能系統學報,2022,17(3):488-495.
[13] 徐碩,侯貴生. 基于VAE-D2GAN的渦扇發動機剩余使用壽命預測[J]. 計算機集成制造系統,2022,28(2):417-425.
[14] 張忠林,張艷. 改進FA優化LSTM的時序預測模型[J]. 計算機工程與應用,2022,58(11):125-132.
[15] 陳可嘉,劉惠. 基于改進BiGRU-CNN的中文文本分類方法[J]. 計算機工程,2022,48(5):59-66,73.
[16] 江濤,劉鑫容,朱耀琴,等. 基于GAN-CNN聯合網絡的復雜產品費用預測[J]. 電子設計工程,2020,28(17):174-179,184.
收稿日期:20220909
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04
