高次旋轉(zhuǎn)多項式的夾爪驅(qū)動盤設(shè)計分析
2024-08-28 00:00:00巨剛羅云秋
機(jī)械制造與自動化 2024年2期



摘"要:針對機(jī)械夾爪驅(qū)動盤運(yùn)動軌跡平滑性設(shè)計問題,提出轉(zhuǎn)盤類時間指數(shù)的高次多項式與一次旋轉(zhuǎn)方程相融合的方法。在平面坐標(biāo)系中對時間類指數(shù)高次多項式函數(shù)進(jìn)行參數(shù)矩陣(基圓半徑、聯(lián)動圓盤類時間指數(shù)、運(yùn)動行程角、運(yùn)動行程)設(shè)定。將平面坐標(biāo)系中相關(guān)高次多項式離散點(diǎn)帶入旋轉(zhuǎn)坐標(biāo)系中實現(xiàn)偏轉(zhuǎn),得到高次旋轉(zhuǎn)多項式軌跡方程。采用一次到八次多項式分別對機(jī)械夾爪驅(qū)動盤運(yùn)動軌跡曲線的位移、類速度、類加速度、類超加速度進(jìn)行分析,得知二次以上旋轉(zhuǎn)多項式的機(jī)械夾爪驅(qū)動盤運(yùn)動軌跡基本處于平滑狀態(tài)。實驗證明:機(jī)械夾爪驅(qū)動盤運(yùn)動的平穩(wěn)性與次數(shù)有關(guān)。
關(guān)鍵詞:機(jī)械夾爪;高次多項函數(shù);旋轉(zhuǎn)矩陣;類時間指數(shù)
中圖分類號:TP241""文獻(xiàn)標(biāo)志碼:B""文章編號:1671-5276(2024)02-0083-04
Design Analysis of Gripper Drive Disc of High Rotation Polynomial
JU Gang1,2,3, LUO Yunqiu1
(1. Hangzhou Puyu Science and Technology Development Co., Ltd., Hangzhou 311305,China;
2. Zhejiang Qinke Mass Spectrometer Innovation Co., Ltd., Hangzhou 311305,China;
3. Concentrating Technology Hangzhou Co., Ltd., Hangzhou 310056,China)
Abstract:For the smoothness design of the mechanical gripper drive disc with the motion trajectory,a method of integrating the high-order polynomial of the turntable index with the primary rotation equation was proposed. The parameter matrix (base circle radius, linkage disk class time index, motion formation angle, motion formation) was set for the time class exponential high-order polynomial function in the plane coordinate system. The correlation high-order polynomial discrete point matrix was brought into the rotating coordinate system to achieve deflection in the plane coordinate system, and the high-degree rotation polynomial trajectory equation was obtained. The displacement, quasi-velocity, acceleration-like and super-acceleration of the motion trajectory curve of the mechanical gripper drive disc were analyzed from one to eight times, reaching a smooth state of the motion trajectory of the mechanical gripper drive disc of the polynomial of more than two rotations. The experiments show that the smoothness of the mechanical gripper drive disc movement is related to the number of times.
Keywords:mechanical gripper; high-order polynomial function; rotation matrix; class time index
0"引言
隨著智能科技迅速發(fā)展,機(jī)械臂替代人工成為當(dāng)下工業(yè)發(fā)展必然趨勢。機(jī)械夾爪作為機(jī)械臂執(zhí)行終端,實現(xiàn)自動化成為重中之重。因此對機(jī)械夾爪進(jìn)行研究顯得十分必要。
對機(jī)械夾爪的研究,已成為21世紀(jì)工業(yè)研究的熱點(diǎn)問題,并取得了相當(dāng)?shù)难芯砍晒约袄碚摲治龇椒ā鴥?nèi)很多研究人員對機(jī)械臂夾爪的相關(guān)問題進(jìn)行了研究,也取得了一些進(jìn)展。比如:付振山等[1]采用弧面與旋轉(zhuǎn)坐標(biāo)以及二次函數(shù)融合方法對設(shè)計軌跡進(jìn)行研究;吳志等[2]利用剛?cè)峄旌弦约奥菪齻鲃酉嗯浜系姆椒ǎO(shè)計出一種通用性的機(jī)械夾爪末端執(zhí)行器;朱毅然等[3]通過非支配排序遺傳算法與響應(yīng)面法相融合的方法對機(jī)械夾爪進(jìn)行設(shè)計研究;皮杰等[4] 結(jié)合增材制造技術(shù)與仿生學(xué)原理,設(shè)計一種具有自適應(yīng)性、結(jié)構(gòu)簡單的柔性機(jī)械夾爪;劉艷等[5] 采用深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)算法,同時多物件抓取,有一定的效能提升;李泊等[6]使用矩陣法與D-H法建立運(yùn)動學(xué)方程以及相關(guān)坐標(biāo)系,采用MATLAB軟件進(jìn)行運(yùn)動軌跡仿真,獲得機(jī)械夾爪的運(yùn)動范圍;巨剛等[7] 采用高次多項式規(guī)律運(yùn)動位移方程及擬合參數(shù)法,對運(yùn)動軌跡的沖擊平穩(wěn)性進(jìn)行研究,特別是采用加速度分析法;杜方輝等[8]采用了氣缸驅(qū)動的差動平移型機(jī)械手夾持器;王階等[9]使用氣動肌肉收縮量與并聯(lián)機(jī)構(gòu)平臺轉(zhuǎn)動角度的函數(shù)關(guān)系,對機(jī)械夾爪運(yùn)行軌跡進(jìn)行了相關(guān)研究;胡海霞等[10] 采用TRIZ理論對雙夾持自適應(yīng)的末端執(zhí)行器進(jìn)行了相關(guān)研究。這些研究對機(jī)械夾爪相關(guān)設(shè)計、沖擊優(yōu)化等分析提供了重要的技術(shù)手段與理論基礎(chǔ)。
本文采用MATLAB軟件對高次旋轉(zhuǎn)多項式的機(jī)械夾爪進(jìn)行軌跡分析研究,進(jìn)而對一次到八次旋轉(zhuǎn)運(yùn)動軌跡曲線位移、類速度、類加速度、類超加速度等進(jìn)行分析,從而得出了二次以上曲線對機(jī)械夾爪平穩(wěn)性有著重要影響。
1"建立高次多項旋轉(zhuǎn)矩陣方程
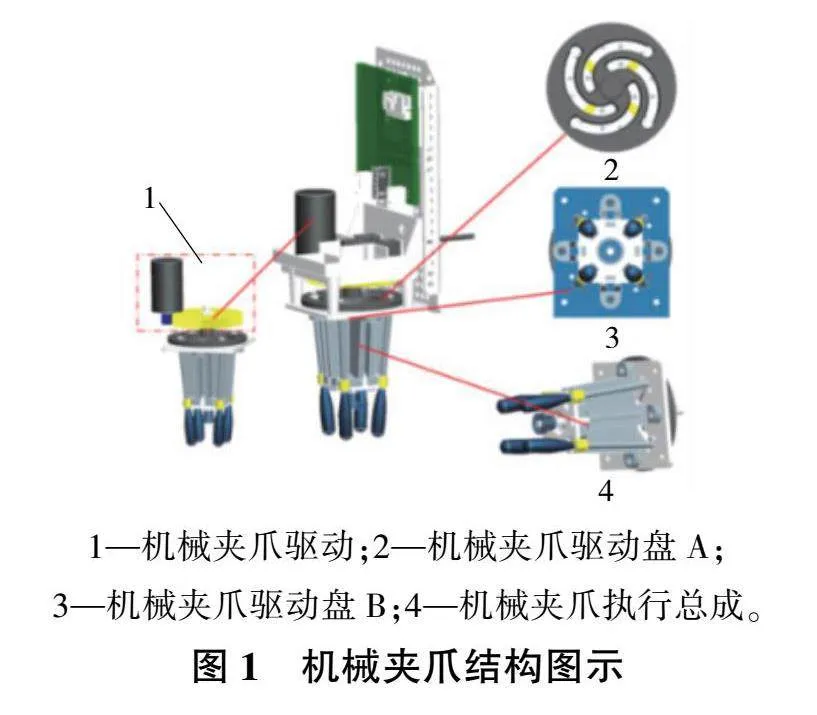
1.1"機(jī)械夾爪結(jié)構(gòu)圖
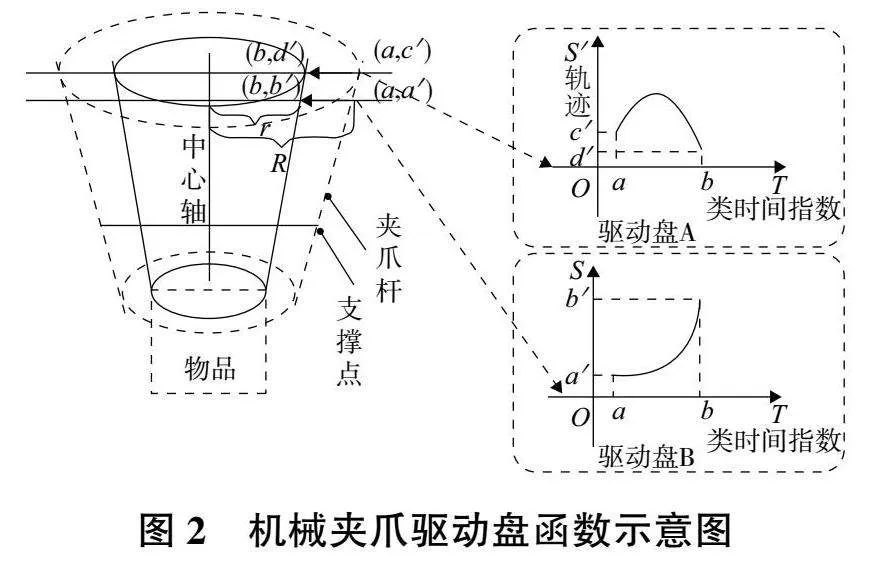
建立高次多項旋轉(zhuǎn)矩陣方程前,需要對機(jī)械夾爪結(jié)構(gòu)進(jìn)行說明,如圖1所示。機(jī)械夾爪包括四大部分,分別為機(jī)械夾爪驅(qū)動、機(jī)械夾爪驅(qū)動盤A、 機(jī)械夾爪驅(qū)動盤B、機(jī)械夾爪執(zhí)行總成。建立的矩陣方程主要與機(jī)械驅(qū)動盤A和B有關(guān),如圖2所示。
1.2"高次旋轉(zhuǎn)矩陣
機(jī)械夾爪驅(qū)動盤建立高次多項式函數(shù):
S=r+KT+C0T2+C1T3+C2T4+C3T5+…+
Cn-1Tn+1+CnTn+2(1)
式中:S為驅(qū)動盤夾爪運(yùn)行軌跡位移曲線;r為基圓半徑;T為聯(lián)動圓盤類時間指數(shù),且T∈[0,1];K為運(yùn)動行程;C0~Cn為補(bǔ)償系數(shù),一般取0|1,且n為自然數(shù)。
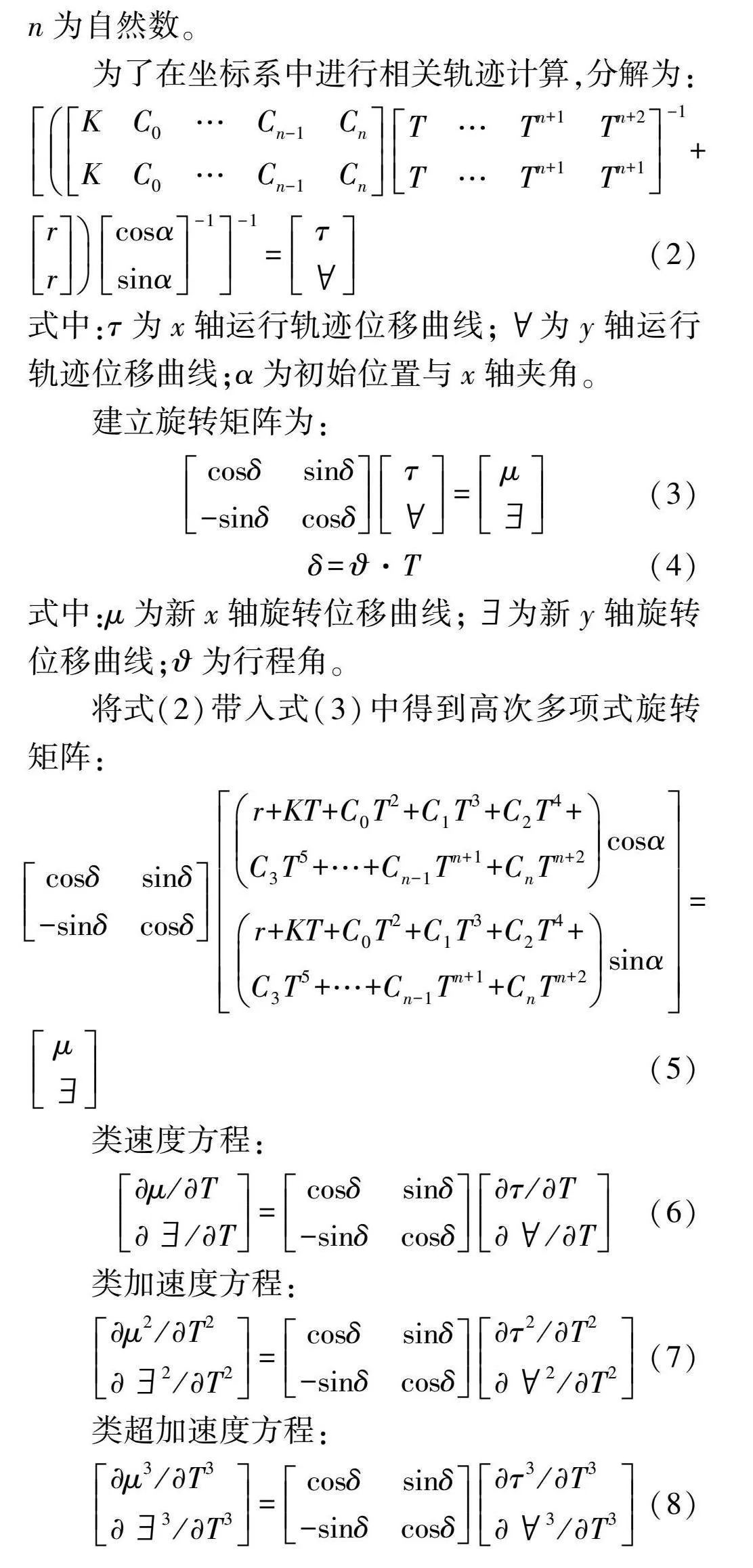
為了在坐標(biāo)系中進(jìn)行相關(guān)軌跡計算,分解為:
KC0…Cn-1CnKC0…Cn-1CnT…Tn+1Tn+2T…Tn+1Tn+1-1+
rrcosαsinα-1-1=τ(2)
式中:τ為x軸運(yùn)行軌跡位移曲線;為y軸運(yùn)行軌跡位移曲線;α為初始位置與x軸夾角。
建立旋轉(zhuǎn)矩陣為:
cosδsinδ-sinδcosδτ=μ(3)
δ=·T(4)
式中:μ為新x軸旋轉(zhuǎn)位移曲線;為新y軸旋轉(zhuǎn)位移曲線;為行程角。
將式(2)帶入式(3)中得到高次多項式旋轉(zhuǎn)矩陣:
cosδsinδ
-sinδcosδr+KT+C0T2+C1T3+C2T4+C3T5+…+Cn-1Tn+1+CnTn+2cosα
r+KT+C0T2+C1T3+C2T4+C3T5+…+Cn-1Tn+1+CnTn+2sinα=
μ(5)
類速度方程:
μ/T/T=cosδsinδ-sinδcosδτ/T/T(6)
類加速度方程:
μ2/T22/T2=cosδsinδ-sinδcosδτ2/T22/T2(7)
類超加速度方程:
μ3/T33/T3=cosδsinδ-sinδcosδτ3/T33/T3(8)
2"實例驗證
2.1"機(jī)械夾爪高次旋轉(zhuǎn)理論仿真分析
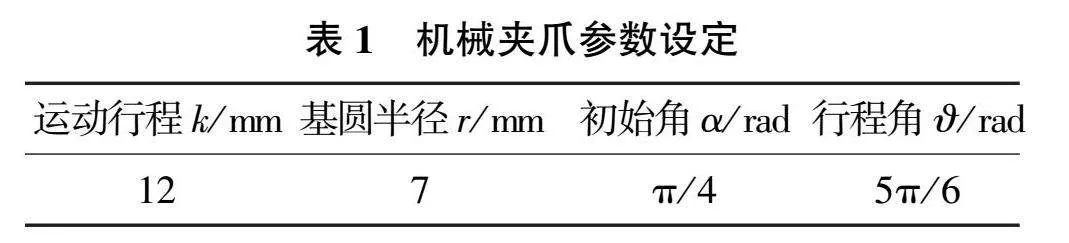
分別對一次到八次多項旋轉(zhuǎn)方程進(jìn)行驗證。機(jī)械夾爪參數(shù)設(shè)定,如表1所示。
機(jī)械夾爪驅(qū)動盤驅(qū)動軌跡位移、類速度、曲線函數(shù)、類加速度、類超加速度分別如式(9)—式(12)所示。
Sx(T)Sy(T)=fx(T)fy(T)=cosδsinδ-sinδcosδ(r+KT)cosα(r+KT)sinα,C0~Cn=0cosδsinδ-sinδcosδ(r+KT+T2)cosα(r+KT+T2)sinα,C0~Cn=1,n=0""""""""cosδsinδ-sinδcosδ(r+KT+…+T8)cosα(r+KT+…+T8)sinα,C0~Cn=1,n=6(9)
V·x(T)
V·y(T)=S·x(T)
S·y(T)=f·x(T)
f·y(T)(10)
式中:V·x(T)為x方向類速度曲線;V·y(T)為y方向類速度曲線。
V··x(T)
V··y(T)=S··x(T)
S··y(T)=f··x(T)
f··y(T)(11)
式中:V··x(T)為x方向類加速度曲線;V··y(T)為y方向類加速度曲線。
V···x(T)
V···y(T)=S···x(T)S···y(T)=f···x(T)
f···y(T)(12)
式中:V···x(T)為x方向類超加速度曲線;V···y(T)為y方向類超加速度曲線。
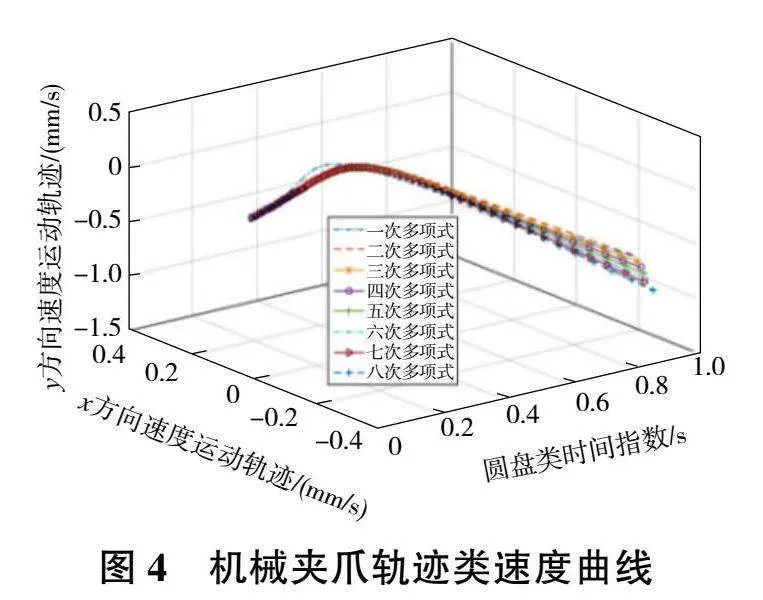
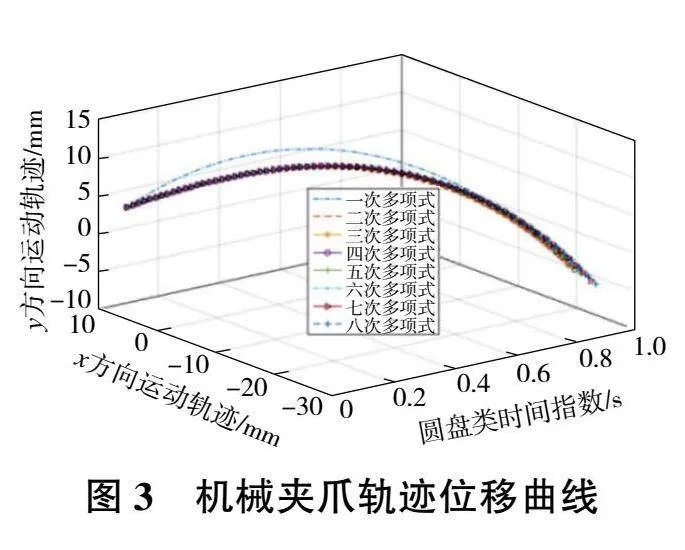
圖3為機(jī)械夾爪一次到八次旋轉(zhuǎn)軌跡位移曲線(本刊黑白印刷,相關(guān)疑問請咨詢作者)。圖上顯示出在T∈[0,1]范圍內(nèi),T=0.2~0.5s這段區(qū)間,y、z方向一次旋轉(zhuǎn)位移曲線較二次以上旋轉(zhuǎn)曲線位移最大差值約x=0.5mm,y=2.6mm,平滑性略差。圖4為機(jī)械夾爪一次到八次旋轉(zhuǎn)軌跡類速度曲線。圖上顯示在類時間指數(shù)T=0.42s時,一次曲線V·x(T)
V·y(T)=0.218-0.07處于類速度突變最高點(diǎn),二次以上曲線基本處于平滑過度。圖5為機(jī)械夾爪一次到八次旋轉(zhuǎn)軌跡類加速度曲線。從圖上可以看出,在類時間指數(shù)T=0.52s時,一次曲線V··x(T)
V··y(T)=0.006-0.004處于類加速度突變最高點(diǎn),二次以上曲線基本沒有突變點(diǎn)出現(xiàn)。
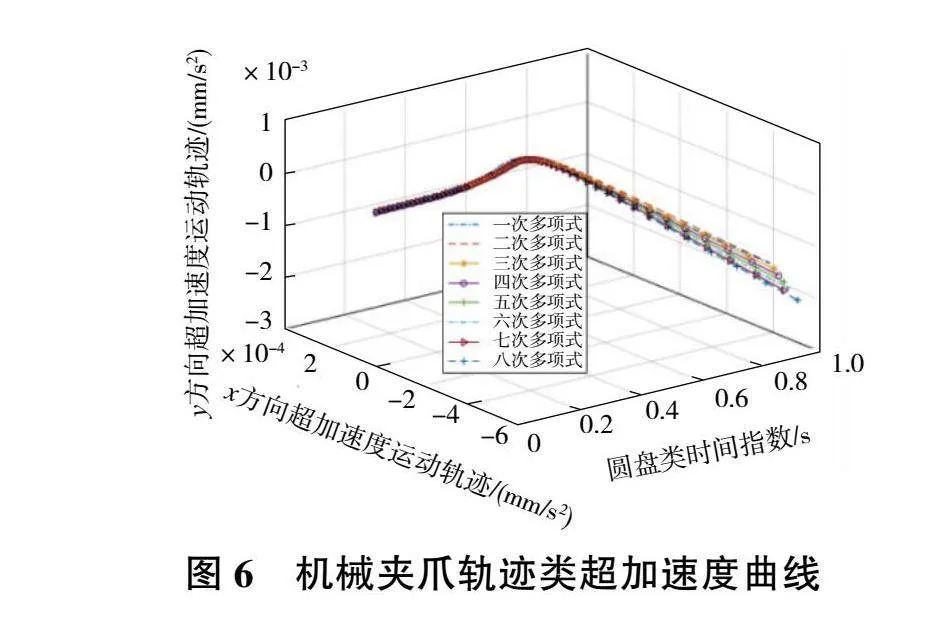
圖6為機(jī)械夾爪一次到八次旋轉(zhuǎn)軌跡類超加速度曲線。從圖上可以看出,在類時間指數(shù)T=0.58s時,一次曲線V···x(T)
V···y(T)=0.000 1-0.000 1處于類加速度突變最高點(diǎn),二次以上曲線突變點(diǎn)變化不明顯。
機(jī)械夾爪軌跡位移曲線實際反映夾爪運(yùn)動情況,整體運(yùn)動趨勢越趨于平緩越呈現(xiàn)平滑狀態(tài)。夾爪類速度曲線參數(shù)、類加速度曲線參數(shù)以及類超加速度曲線可以真實反映夾爪沖擊運(yùn)動情況。通過以上分析得出二次以上旋轉(zhuǎn)位移曲線,夾爪沖擊性隨之減少。
2.2"機(jī)械夾爪實物驗證
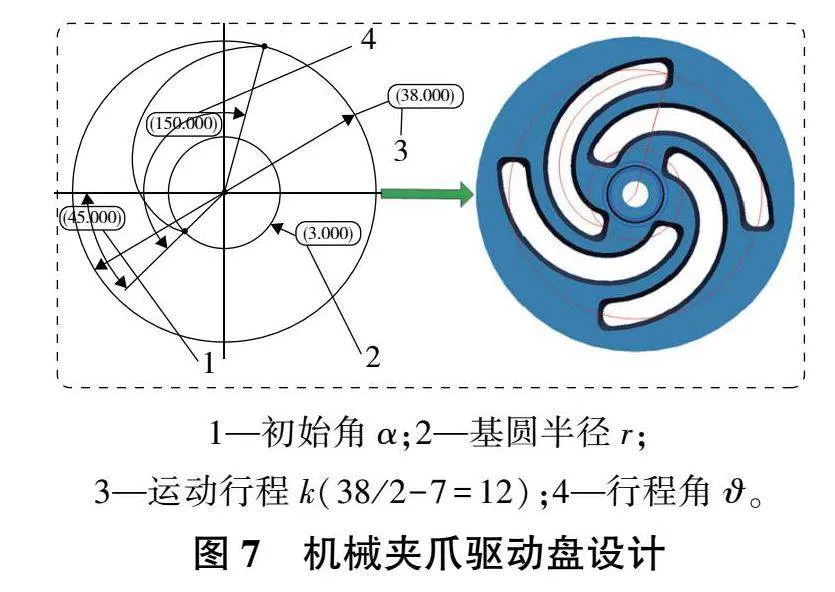
機(jī)械夾爪進(jìn)行實物驗證設(shè)計,根據(jù)高次多項旋轉(zhuǎn)軌跡位移曲線通用公式,設(shè)置初始角為π/4 rad,基圓半徑為7mm,運(yùn)動行程為12mm,行程角為5π/6 rad。實物實際設(shè)計設(shè)置為二次多項旋轉(zhuǎn)曲線,如圖7所示。
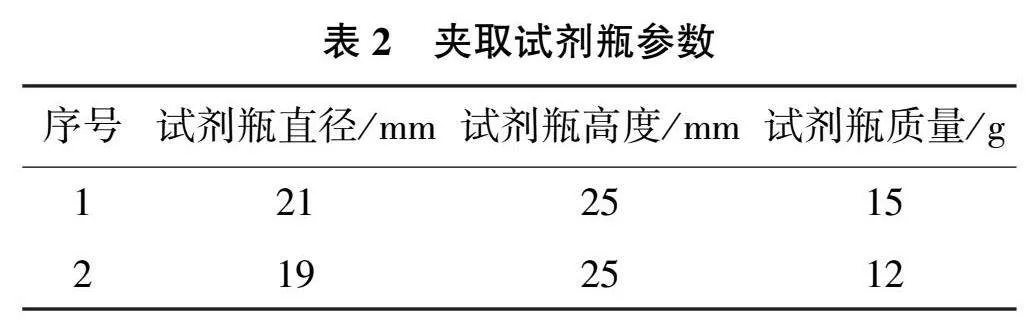
設(shè)計夾爪軌跡夾取行程范圍為18~22mm,現(xiàn)取試劑瓶進(jìn)行實際驗證,詳細(xì)參數(shù)如表2所示。
在測試過程中,一次多項旋轉(zhuǎn)曲線旋轉(zhuǎn)盤發(fā)現(xiàn)在夾取1號試劑瓶,出現(xiàn)嚴(yán)重抖動,并且電機(jī)有沉悶響聲;夾取2號試劑瓶,出現(xiàn)稍微抖動,未見電機(jī)有其他異響。二次多項旋轉(zhuǎn)曲線旋轉(zhuǎn)盤,分別夾取1號和2號試劑瓶,均未出現(xiàn)抖動以及電機(jī)異常響聲,反映平滑無沖擊。
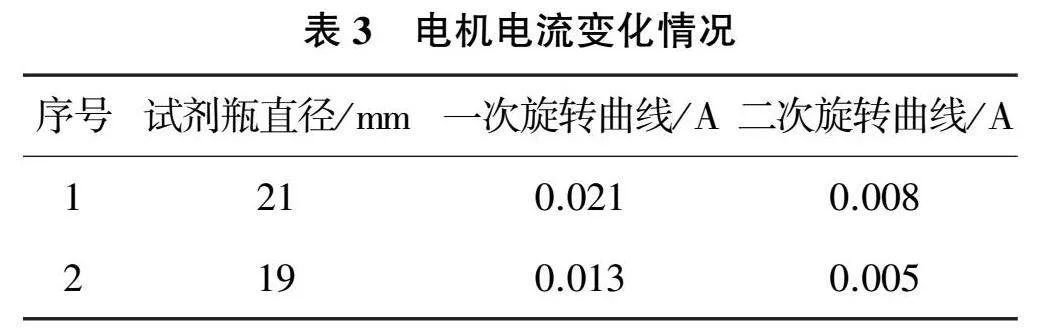
圖8為機(jī)械夾爪實物圖。機(jī)械夾爪驅(qū)動盤實際夾取試劑瓶在運(yùn)動過程中比較平穩(wěn),未出現(xiàn)一次多項旋轉(zhuǎn)曲線抖動,機(jī)械夾爪在運(yùn)動過程中出現(xiàn)電機(jī)反饋的電流跳變最大值為0.021A/0.013A,相較于二次曲線均增大,如表3所示。
3"結(jié)語
基于高次旋轉(zhuǎn)多項式機(jī)械夾爪驅(qū)動盤設(shè)計與分析,通過高次多項式與旋轉(zhuǎn)矩陣相結(jié)合,設(shè)定基圓半徑、聯(lián)動圓盤類時間指數(shù)、運(yùn)動行程角、運(yùn)動行程等參數(shù),計算機(jī)械夾爪驅(qū)動盤運(yùn)動一次到八次軌跡曲線的位移、類速度、類加速度、類超加速度,仿真分析以及試驗驗證得出:
1)二次以上多項旋轉(zhuǎn)軌跡位移曲線具有平滑性;
2)二次機(jī)械夾爪驅(qū)動盤實際夾取試劑瓶的運(yùn)動過程比較平穩(wěn);
3)機(jī)械夾爪驅(qū)動盤運(yùn)動的平穩(wěn)性與次數(shù)有關(guān)。
參考文獻(xiàn):
[1] 付振山,于春玲,丁進(jìn),等. 弧面凸輪兩旋轉(zhuǎn)坐標(biāo)聯(lián)動機(jī)床非等價加工誤差分析[J]. 機(jī)械設(shè)計,2022,39(4):105-109.
[2] 吳志,寧萌,顏大千,等. 機(jī)械手設(shè)計及其運(yùn)動分析[J]. 機(jī)械設(shè)計與研究,2022,38(2):97-100,119.
[3] 朱毅然,余朝剛. 軌距調(diào)整器夾爪輕量化優(yōu)化設(shè)計[J]. 機(jī)械設(shè)計與研究,2021,37(1):195-199.
[4] 皮杰,柳軍,徐磊,等. 三指柔性氣動夾爪結(jié)構(gòu)設(shè)計與實驗[J]. 農(nóng)業(yè)機(jī)械學(xué)報,2020,51(增刊1):93-101.
[5] 劉艷,馮志杰. SSD深度學(xué)習(xí)算法在機(jī)械手抓取系統(tǒng)中的應(yīng)用[J]. 組合機(jī)床與自動化加工技術(shù),2020(6):67-70.
[6] 李泊,李成群. 取藥機(jī)械手的設(shè)計及其運(yùn)動分析與仿真[J]. 機(jī)床與液壓,2019,47(17):71-75.
[7] 巨剛,袁亮,劉小月. 凸輪機(jī)構(gòu)高次多項式運(yùn)動規(guī)律曲線研究及仿真分析[J]. 機(jī)械設(shè)計與制造,2015(5):107-109,114.
[8] 杜方輝,盛小明. 由組合氣缸驅(qū)動的機(jī)械手雙爪差動平移夾持器[J]. 液壓與氣動,2012(8):35-37.
[9] 王階,金英子,唐智紅. 一種氣動肌肉機(jī)械手關(guān)節(jié)的機(jī)構(gòu)設(shè)計與實現(xiàn)[J]. 機(jī)床與液壓,2009,37(7):86-88,92.
[10] 胡海霞,常博斌,王成軍,等. 基于TRIZ理論的擠奶機(jī)器人末端執(zhí)行器結(jié)構(gòu)設(shè)計[J]. 機(jī)械制造與自動化,2022,51(5):159-162,166.
收稿日期:20221027
