無軸承永磁同步電主軸的模糊滑模位移控制
2024-08-28 00:00:00白郭蒙單文桃惲之恒
機械制造與自動化 2024年2期





摘"要:為滿足無軸承永磁同步電主軸高性能轉子位移控制要求,結合遺傳算法尋優快及模糊控制能柔化控制信號的優點,設計一種將滑模等效控制、模糊控制和遺傳算法有機結合的電主軸轉子位移控制策略,在滑模控制中引入模糊切換增益,并通過遺傳算法對模糊滑模控制器參數進行優化,從而獲得最佳控制效果。結果表明:模糊滑模控制降低了系統在傳統滑模控制下的抖振,遺傳算法優化后模糊滑模控制下的不同軸向穩態轉子振動峰峰值較優化前分別減小了53%和27.5%。
關鍵詞:無軸承永磁同步電主軸;位移控制;滑模控制;模糊控制;遺傳算法
中圖分類號:TM301.2""文獻標志碼:A""文章編號:1671-5276(2024)02-0234-05
Fuzzy Sliding Mode Displacement Control of BPMSMS
BAI Guomeng,SHAN Wentao,YUN Zhiheng
( Institute of Mechanical Engineering,Jiangsu University of Technology,Changzhou 213001,China)
Abstract:To meet the requirements of high performance rotor displacement control of bearingless permanent magnet synchronous motorized spindles, and by integating the advantages of fast genetic algorithm and softening control signal, a rotor displacement control strategy which organically combines sliding mode equivalent control, fuzzy control and genetic algorithm is proposed. The fuzzy switching gain is introduced in the sliding mode control. The fuzzy sliding mode controller parameters are optimized by genetic algorithm to obtain the best control effect. The results show that the fuzzy sliding mode control reduces the chattering of the system under the traditional sliding mode control. The peak-to-peak values of different axial steady-state rotor vibrations under fuzzy sliding mode control optimized by the genetic algorithm are reduced by 53% and 27.5% respectively.
Keywords:bearingless permanent magnet synchronous motorized spindle;displacement control;sliding mode control;fuzzy control;genetic algorithm
0"引言
高速電主軸作為數控機床的核心功能部件之一,具有高轉速、高精度和高效率等特點[1-2]。隨著無軸承電機研究的不斷發展,以無軸承電機為內核的無軸承永磁同步電主軸將具有更加重要的研究意義。無軸承永磁同步電主軸(bearingless permanent magnet synchronous motorized spindle, BPMSMS)既繼承了永磁同步電主軸的優良特性,又加入了無軸承永磁同步電機的轉子懸浮功能,可以通過懸浮繞組通電產生懸浮力控制轉子位移,進一步避免了實際工況中因轉子振動而導致的主軸溫升、噪聲等問題。在實際生產加工過程中,電主軸常用轉子磁場定向控制,故無軸承永磁同步電主軸可沿用i*Md=0的轉子磁場定向控制并配合使用位移-電流雙閉環控制[3],轉矩繞組和懸浮力繞組通入相同頻率的電流,并且兩繞組極對數相差一時,電機內部可以產生穩定的可控懸浮力。
針對無軸承電機位移控制方法的研究,國內外學者提出了諸多控制方案和改進措施。文獻[4]提出采用模糊PID控制器代替傳統PID控制器的方法,解決了傳統PID控制器不能在線實時整定參數的問題。文獻[5]設計了基于自抗擾控制的轉速控制器和位移控制器,雖有效地克服了比例、積分、微分控制的先天不足,但缺點是控制器參數較多,實際加工中調參困難,難以應用。文獻[6]中針對懸浮控制系統提出了一種H∞魯棒控制,雖然加強了對外部干擾的抑制作用,但是其靈敏度加權函數在實際情況中的選取存在一定困難。而文獻[7]中采用了滑模控制策略(sliding mode control,SMC),其具有動態響應較快、對外部擾動不敏感等特點,控制器設計過程也較為簡單,雖存在抖振問題,但可以選擇合適的趨近律或結合智能控制算法柔化控制信號,達到降低抖振的目的。
本文為實現表貼式無軸承永磁同步電主軸的高精度位移控制,首先根據轉子運動方程設計了滑模等效位移控制器;其次,為降低系統抖振引入了模糊切換增益,設計了模糊滑模控制器(fuzzy sliding mode control,FSMC);然后提出一種基于遺傳算法優化的模糊滑模控制(fuzzy sliding mode control optimized by genetic algorithm,GAFSMC)方法,進一步優化控制參數,提高系統控制性能;最后,對傳統滑模控制、模糊滑模控制和遺傳算法優化的模糊滑模控制分別進行了仿真對比分析,驗證了遺傳算法優化的模糊滑模控制的可行性和優越性。
1"無軸承永磁同步電主軸數學模型
無軸承永磁同步電主軸與無軸承電機一樣,都具有旋轉部分和磁懸浮部分。在建立其數學模型時,通常將其數學模型分為轉矩模型和懸浮力模型,表貼式無軸承永磁同步電主軸在兩相靜止坐標系(α-β軸)下的磁鏈方程如下式所示[8]。
ψMαψMβψBαψBβ=LM0Mx-My0LMMyMxMxMyLB0-MyMx0LBiMαiMβiBαiBβ(1)
式中:LM為轉矩繞組自感;LB為懸浮繞組的自感;M為兩套繞組的互感系數;轉矩繞組和懸浮力繞組對應磁鏈和電流分量所在軸系分別由下標α、β表示,其中iMα、iMβ包含永磁體等效勵磁電流分量;x、y為沿位移傳感器方向建立的x-y靜止坐標系下的轉子徑向位移。
通過一系列變換可推得以d-q軸電流描述的懸浮力表達式[9-10]:
Fx=M[(iMd+if)iBd+iMqiBq]
Fy=M[iBdiMq-(iMd+if)iBq](2)
式中:if為永磁體等效勵磁電流;iBd、iBq分別為懸浮繞組電流在d-q軸上的分量;iMd、iMq分別為轉矩繞組電流在d-q軸上的分量;Fx和Fy分別為靜止坐標系下徑向懸浮力。
在轉子磁場定向控制下穩定運行時,表貼式電主軸的電磁轉矩方程可寫為[11]
Te=pMψMdiMq(3)
轉子運動方程簡化為:
mx··=Fx+fxd
my··=Fy+fyd(4)
式中:fxd包含不可控單邊磁拉力和外部擾動;fyd包含不可控單邊磁拉力、重力和外部擾動;m為轉子質量。
2"基于GA優化的模糊滑模位移控制
2.1"滑模控制器設計
參考轉子運動方程,以x軸向運動為例,令:
e=x*-x
e·=-x·(5)
式中:x*為參考位移;x為實際位移。
定義系統的滑模面函數為
s=ce+e·(6)
式中c為常數,cgt;0。
對式(6)求導,再結合式(4)可得
s·=ce·+e··=-cx·-Fx+fxdm(7)
令u=Fx,
s·=ce·+e··=-cx·-1mu-1mfxd(8)
根據等效控制法[12],在不考慮干擾和不確定性情況下,通過取s·=0,先求得滑模等效控制項ueq:
ueq=-cmx·(9)
設計切換控制項usw為
usw=K(t)sgn(s)(10)
取切換增益為
K(t)=maxfxd+η(11)
式中ηgt;0。
結合式(9)和式(10)可得滑模等效控制率:
u=ueq+usw=-cmx·+K(t)sgn(s)(12)
同理可推得y軸向滑模控制率。
對系統進行穩定性分析,取Lyapunov函數為V=0.5s2,則
V·=ss·=s-cx·-1mu-1mfxd=
s-1mK(t)sgn(s)-1mfxd≤-ηms<0(13)
由上式可知,滿足滑模可達性條件。
2.2nbsp;模糊控制器設計
由上述內容可知,合適的切換增益K(t)能夠保證系統運動得以到達滑模面,即K(t)的值必須能抵消不確定項的影響。在外部干擾時變時,切換增益也應時變,但是切換增益的變化也會造成系統不同程度的抖振。為抑制系統的抖振,可在滑模控制中加入模糊切換增益[13],建立模糊滑模控制器。K(t)的變化規則如下:
如果ss·gt;0,則K(t)增大;如果ss·<0,則K(t)減小。
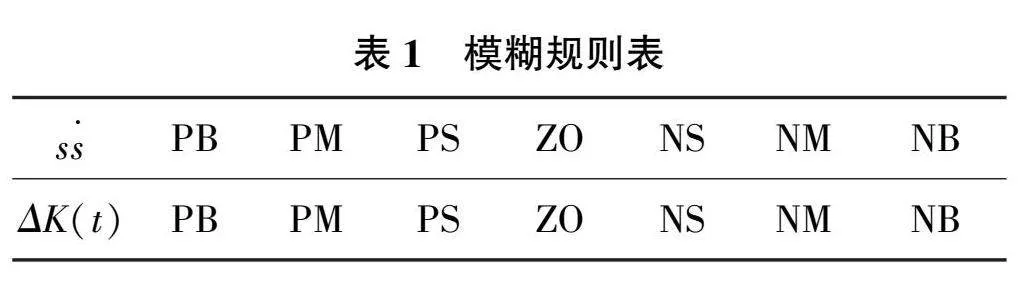
由此可設計關于ss·和ΔK(t)的模糊系統,定義ss·為輸入,ΔK(t)為輸出,對應的詳細模糊控制規則如表1所示。
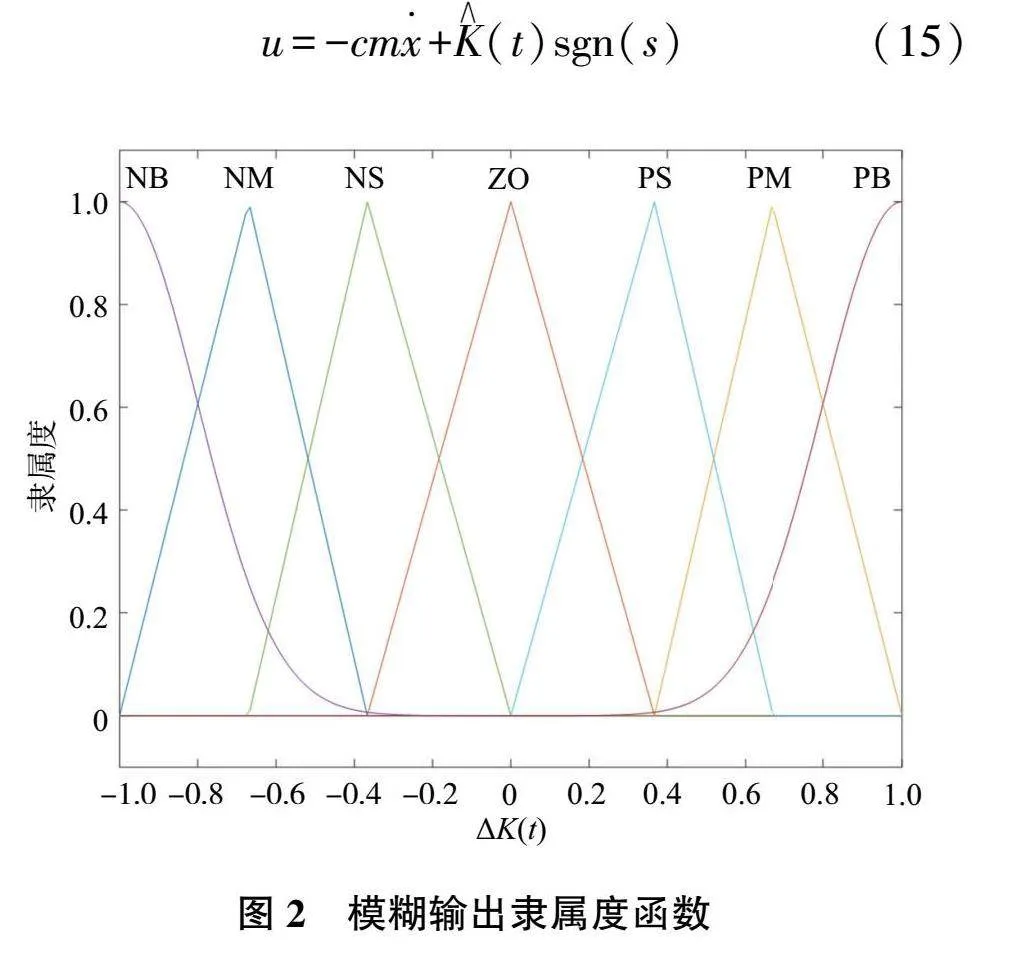
本文使用的模糊控制器為單輸入、單輸出控制器,對系統計算要求不高,模糊邏輯決策采用max-min進行合成,解模糊化處理采用重心法。ss·的模糊論域為[-6,6],隸屬度函數如圖1所示;ΔK(t)的模糊論域為[-1,1],隸屬度函數如圖2所示(本刊黑白印刷,相關疑問請咨詢作者)。
對模糊輸出ΔK(t)采用積分的方法估計K(t)的上界:
K∧(t)=k∫t0ΔK(t)dt(14)
式中k為比例系數,k>0。
將得到的上界估計K∧(t)替換原來滑模控制器中的K(t),可得新控制率:
u=-cmx·+K∧(t)sgn(s)(15)
2.3"GA優化的模糊滑模控制器設計
由于模糊滑模控制中c、k值的變化對控制效果影響較明顯,并且都是根據經驗確定,在實際控制中無法得到最佳控制參數。為取得最佳控制參數c、k,本文選用較為成熟的遺傳算法(genetic algorithm,GA)對參數進行優化。選用誤差性能指標ITAE作為適應度函數,e(t)為轉子位移誤差,此函數兼顧了系統響應快速性和穩定性的評估,其函數方程為
JITAE=∫0te(t)dt(16)
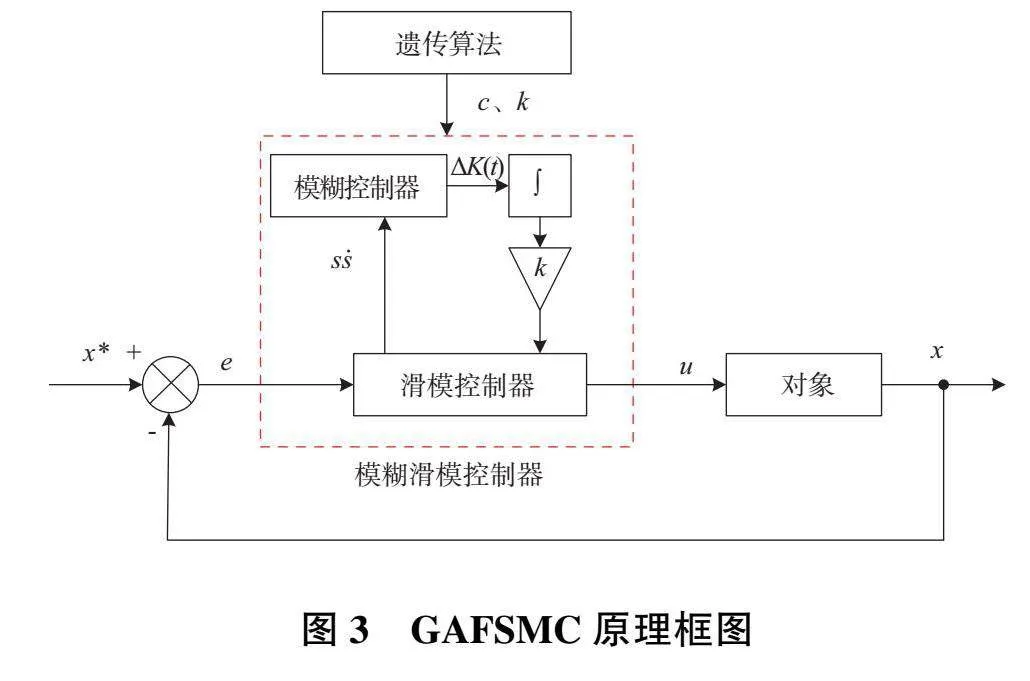
基于遺傳算法優化的模糊滑模控制原理框圖如圖3所示。
3"仿真驗證及結果分析
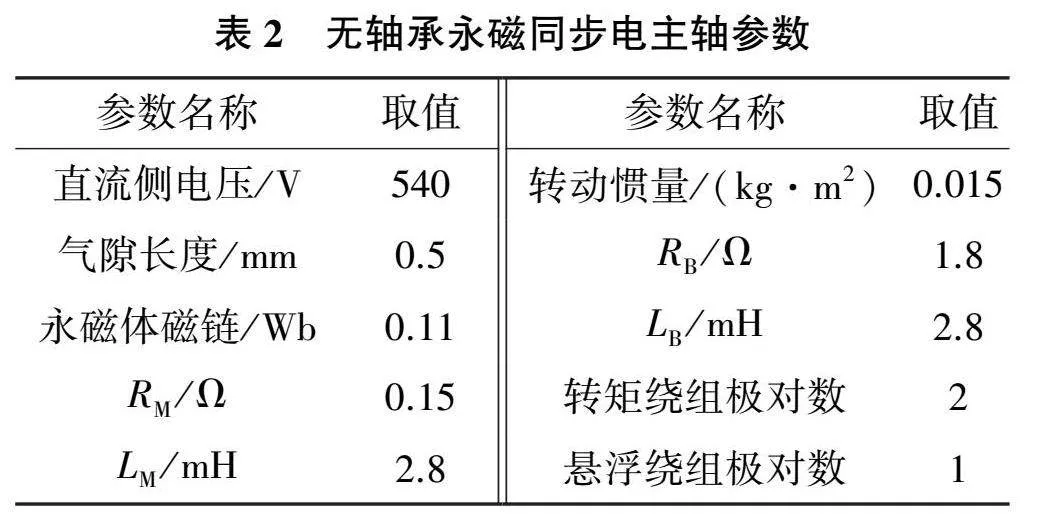
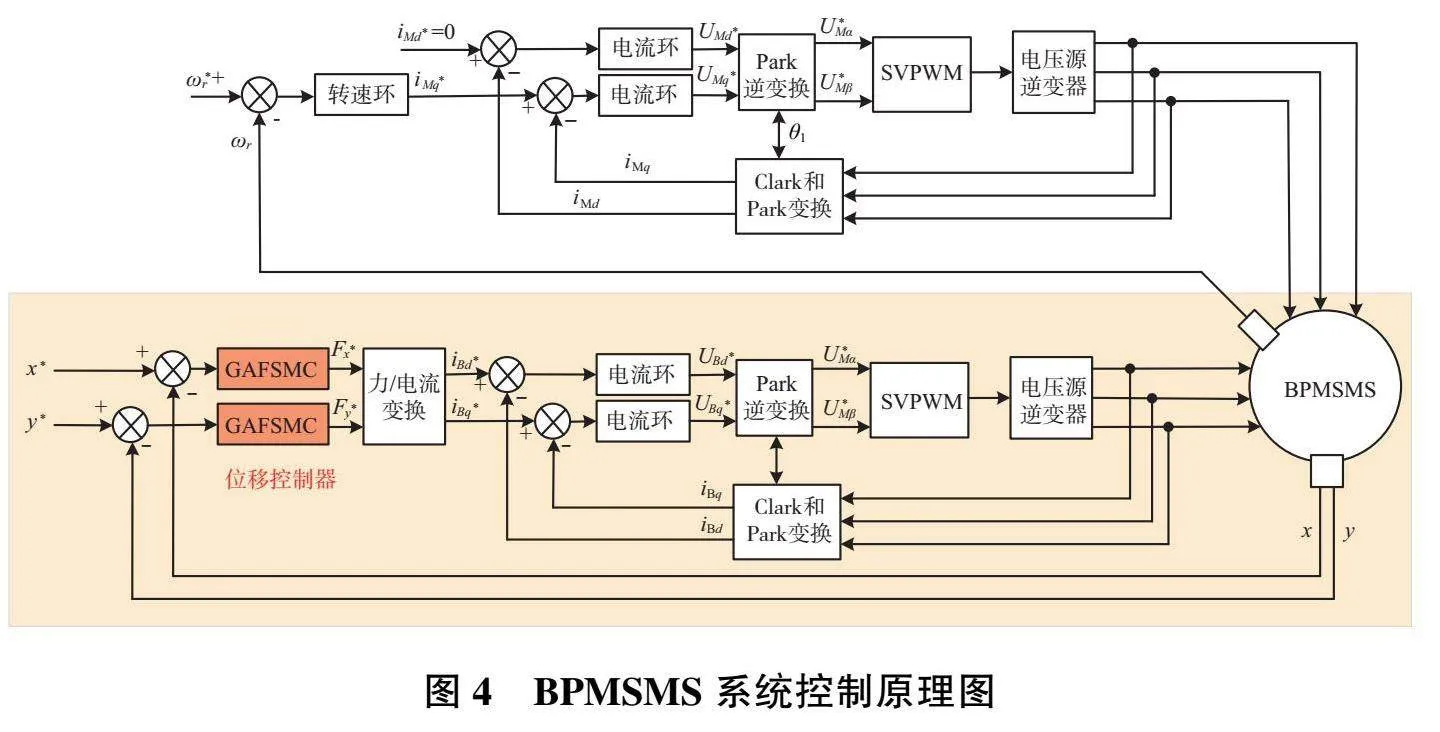
在MATLAB/Simulink中建立表貼式無軸承永磁同步電主軸仿真模型,控制系統原理圖如圖4所示,電主軸仿真參數如表2所示。
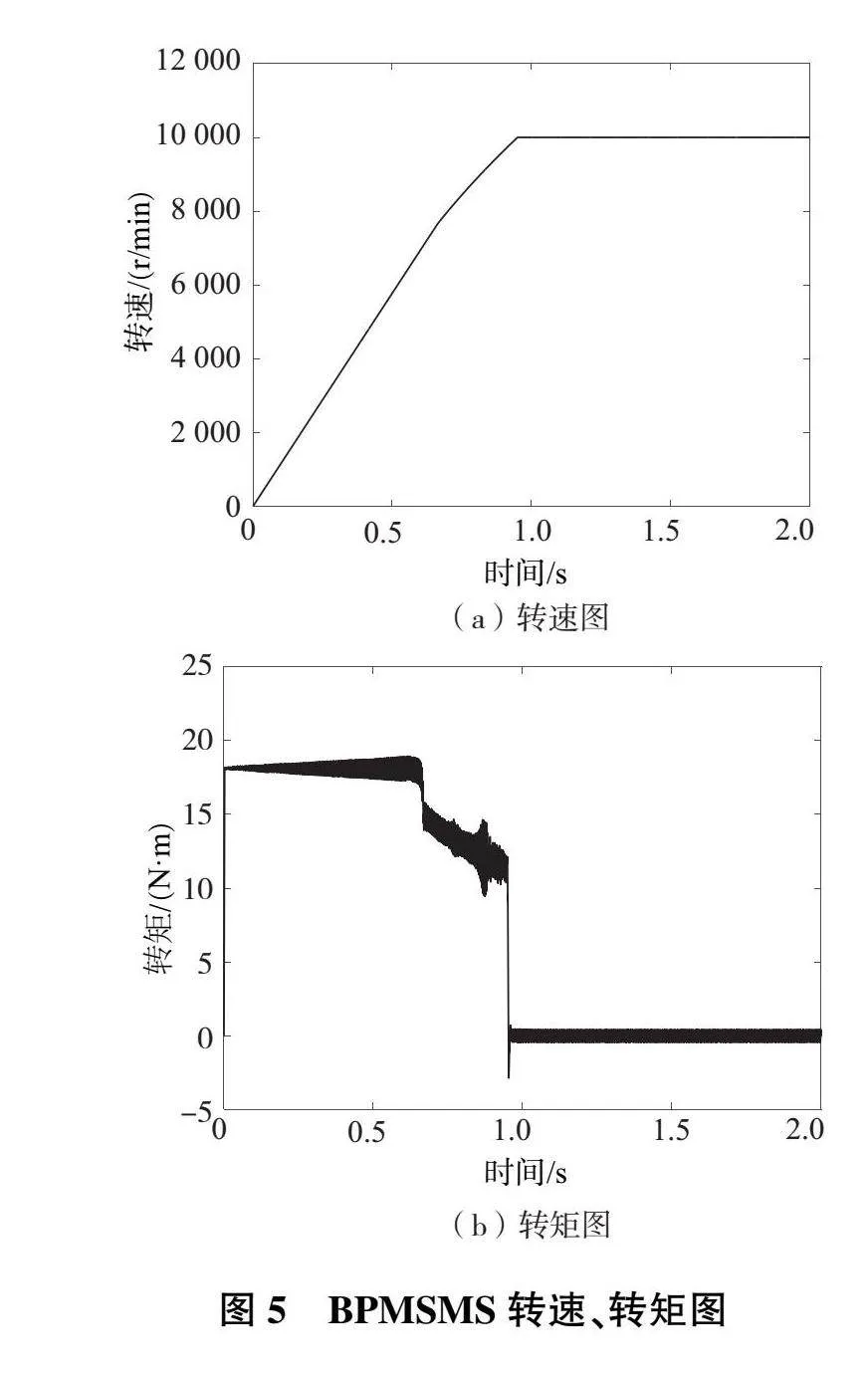
系統仿真時間為2s時,給定轉速為10 000r/min,設定初始位移x0=-0.1mm,y0=-0.2mm,轉子質量為1kg,轉子在x方向始終承受大小為0.5N的隨機干擾力,y方向承受重力。圖5為矢量控制下的表貼式無軸承永磁同步電主軸轉速、轉矩曲線圖,電主軸在1s內到達指定轉速。
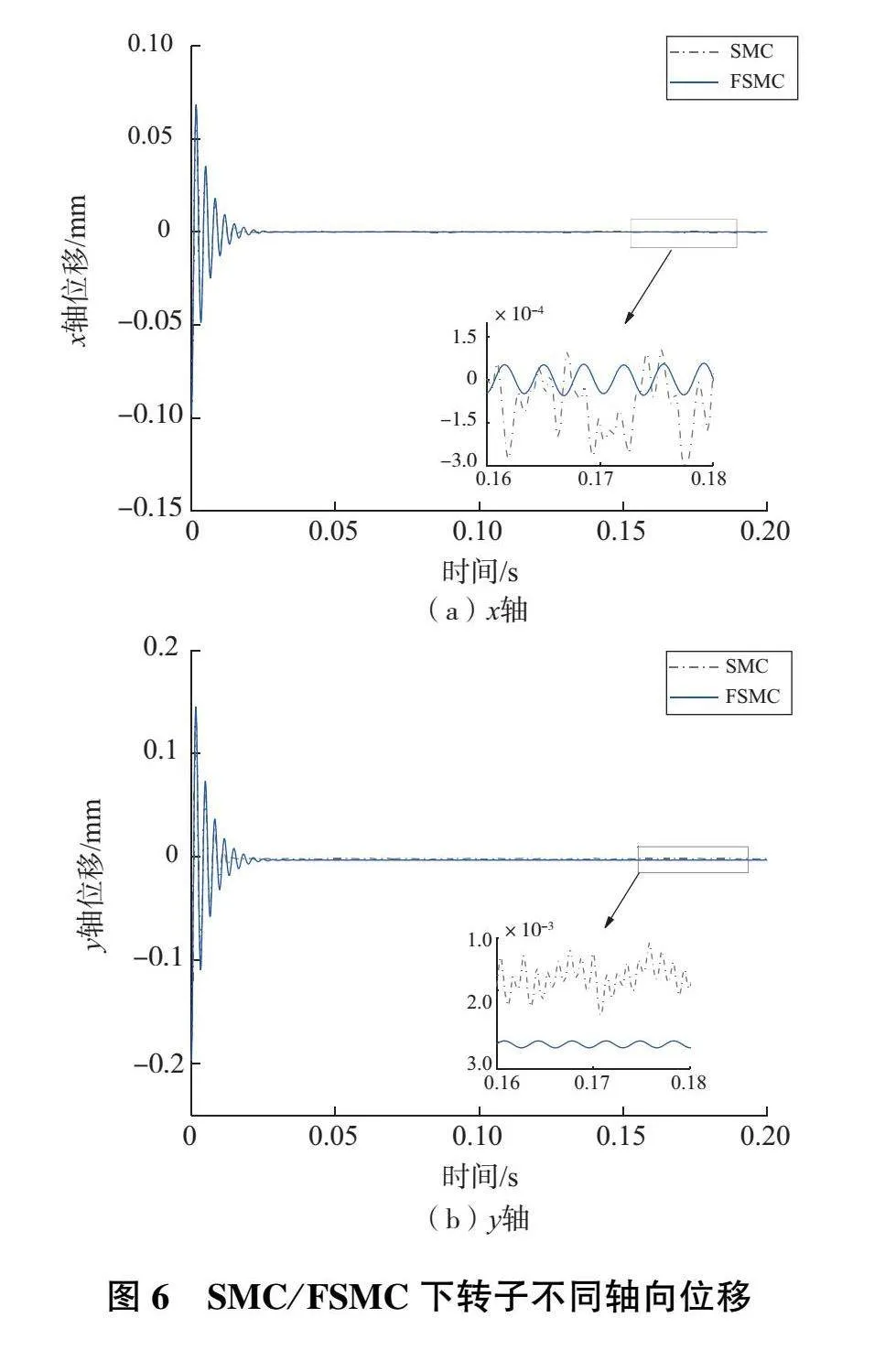
為方便對比分析,取0~0.2s內的轉子軸向位移曲線進行分析,由圖6可知,模糊切換增益滑模控制下的轉子位移波動更小,即模糊切換增益的引入降低了轉子位移控制時的抖振。
采用遺傳算法優化時,相關參數設置如表3所示。
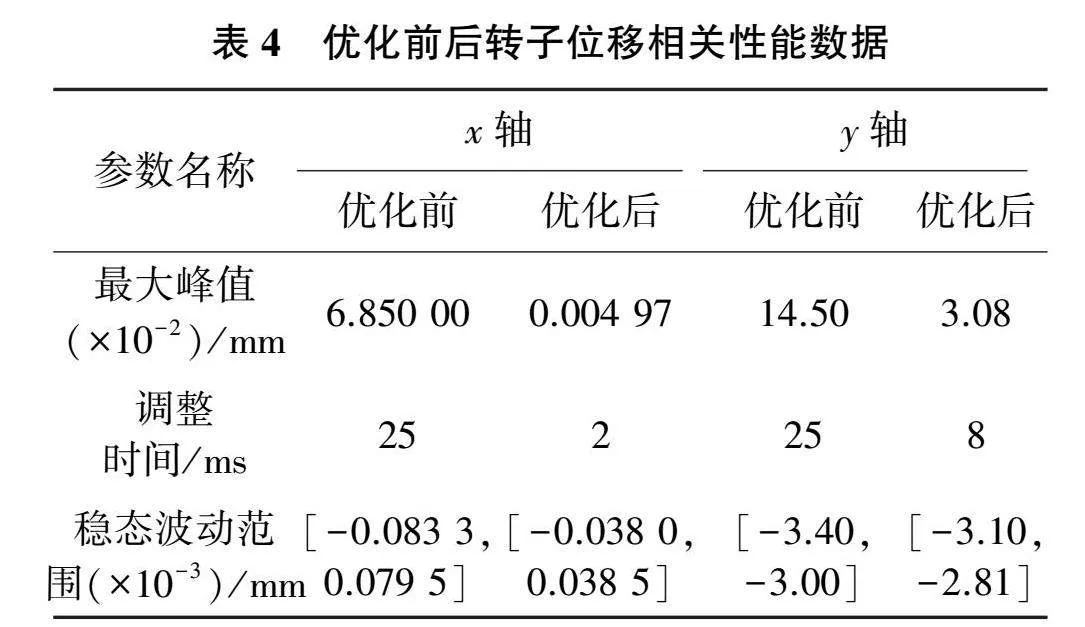
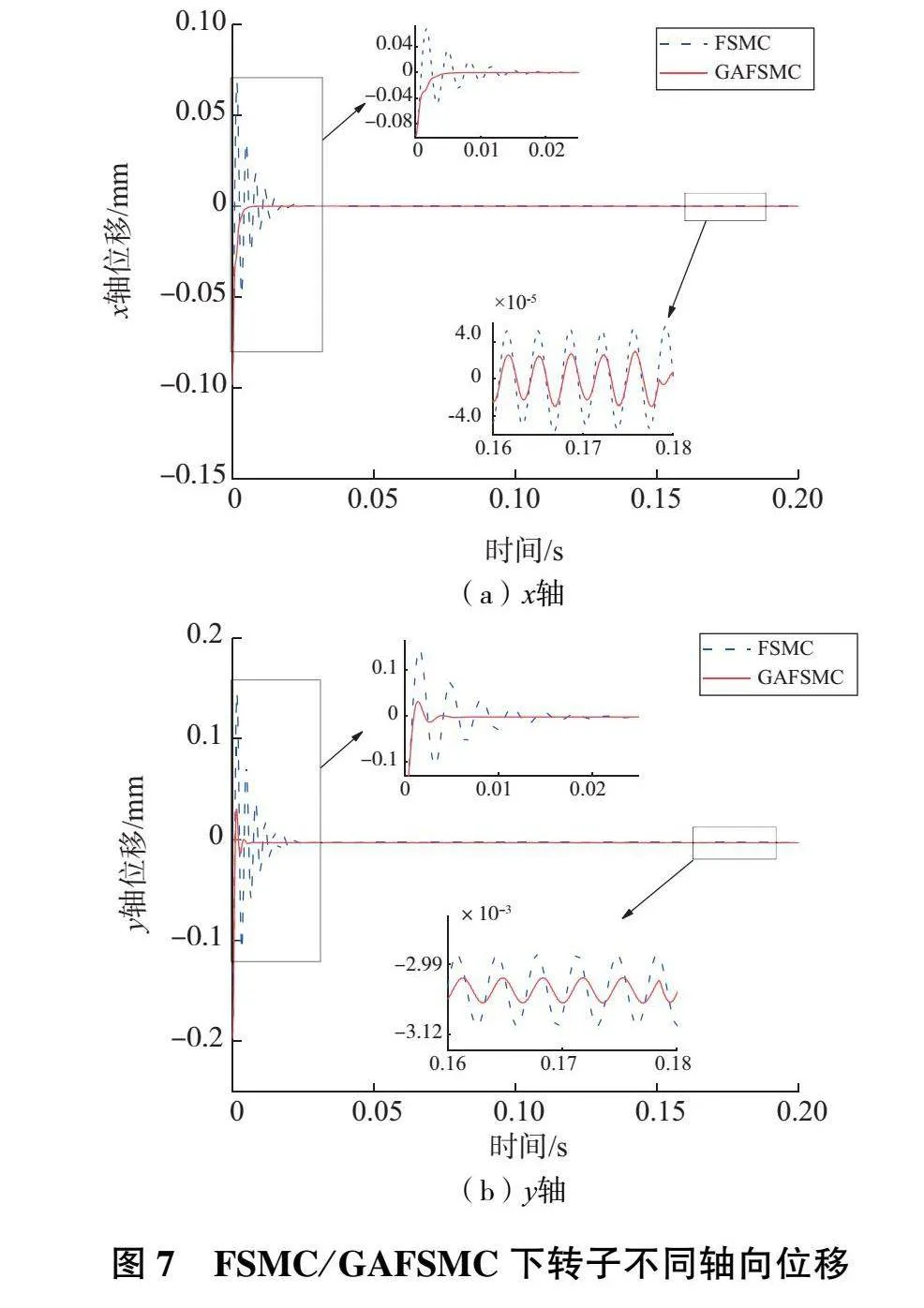
使用遺傳算法前,預調參確定c、k的尋優范圍分別為[100,5 000]和[0.5,60]。由圖7可知,遺傳算法優化后的模糊滑模控制下的x-y軸向位移曲線幾乎沒有超調量,在到達參考位置后的轉子振動較優化前也得到進一步抑制。遺傳算法優化前后的轉子位移相關性能指數如表4所示。
通過計算分析可得,與優化前的模糊滑模控制相比,遺傳算法優化后的模糊滑模控制下轉子x、y軸向最大位移分別減小了0.068 4mm和0.114mm,轉子穩態振動峰峰值分別減小了53%和27.5%。
綜上所述,針對無軸承永磁同步電主軸轉子運行非線性及不確定等特點,遺傳算法優化的模糊滑模位移控制具有較高的控制精度以及優良的動態性能。
4"結語
本文為實現表貼式無軸承永磁同步電主軸高精度轉子位移控制,提出了一種遺傳算法優化的模糊滑模控制方法。得到以下結論:模糊切換增益的引入柔化了滑模懸浮力控制信號,不同軸向滑模控制中的抖振都得到了有效抑制;通過使用遺傳算法可進一步優化模糊滑模控制效果,根據相應適應度函數獲得最優控制參數,提高系統響應速度。但轉子位移適應度函數以及模糊規則表達存在多種形式,如何針對電主軸選擇合適的表達方式,以及其對優化結果的影響還需要進一步深入研究,同時還需要設計相關實驗進一步驗證結論。
參考文獻:
[1] 單剛,單文桃,芮曉倩. 電主軸關鍵技術研究綜述[J]. 數碼設計,2017(6):103-105,111.
[2] 單文桃,王鑫. 基于模糊滑模切換控制的PMSMS弱磁調速控制策略[J]. 振動與沖擊,2020,39(4):222-228.
[3] ZHU H Q,YUAN J F,JV J. A novel single winding structure and closed loop control of the suspension force vector of bearingless permanent magnet synchronous motors[J]. Energies,2016,9(5):377.
[4] 嚴欣平. 無軸承永磁同步電機電磁設計與控制策略研究[D]. 重慶:重慶大學,2008.
[5] ZHANG W,ZHU H Q,XU Y,et al. Direct control of bearingless permanent magnet slice motor based on active disturbance rejection control[J]. IEEE Transactions on Applied Superconductivity,2020,30(4):1-5.
[6] 周媛. 永磁型無軸承電機的運行控制研究[D]. 杭州:浙江大學,2006.
[7] YANG Z B,ZHANG D,SUN X D,et al. Nonsingular fast terminal sliding mode control for a bearingless induction motor[J]. IEEE Access,2017,5:16656-16664.
[8] 朱熀秋,成秋良,王成波. 基于機械/電氣坐標系變換的無軸承永磁同步電機建模[J]. 中國科學E輯,2010,40(1):52-58.
[9] WANG X,ZHU H Q. Vibration compensation control of BPMSM with dead-time effect based on adaptive neural network band-pass filter[J]. IEEE Transactions on Power Electronics,2022,37(6):7145-7155.
[10] 王寶國. 無軸承電機磁懸浮機理及其控制方法研究[D]. 沈陽:沈陽工業大學,2002.
[11] 朱誯秋,秦英,鞠金濤,等. 基于磁鏈耦合分析的無軸承永磁同步電機通用數學模型[J]. 振動與沖擊,2015,34(17):191-198.
[12] 周向陽,李玲玲,趙立波. 基于擴張狀態觀測器的穩定平臺非奇異終端滑模控制[J]. 儀器儀表學報,2018,39(5):161-169.
[13] 周向陽,舒通通,呂子豪,等. 基于模糊切換增益調節的慣性穩定平臺滑模控制[J]. 儀器儀表學報,2021,42(12):263-271.
收稿日期:20221019
