四輪驅動自動導引車橫向軌跡跟蹤研究
2024-08-28 00:00:00王玉潔陳遠
機械制造與自動化 2024年2期
摘"要:軌跡跟蹤控制是自主導引車(AGV)的重要組成部分。為提高軌跡跟蹤的快速性和穩定性,根據牛頓歐拉方程建立AGV的二自由度動力學方程,據此建立誤差模型,設計基于AGV動力學模型的線性時變模型預測控制算法,建立以狀態增量和控制增量為變量的優化函數,對其添加狀態量約束、控制量約束和控制增量約束,同時增加軟約束動態,通過仿真對設計的控制器進行分析驗證,結果證明了控制器的有效性。
關鍵詞:自動導引車;軌跡跟蹤控制;模型預測控制
中圖分類號:U461""文獻標志碼:B""文章編號:1671-5276(2024)02-0243-04
Research on Lateral Trajectory Tracking of Four-wheel Drive AGV
WANG Yujie1,CHEN Yuan2
(1. School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;
2. Jiangsu Jinling Institute of Intelligent Manufacturing Co., Ltd., Nanjing 210006,China)
Abstract:Track tracking control is an important part of automated guided vehicle (AGV). In order to improve the rapidity and stability of trajectory tracking, a two degree of freedom dynamic equation of AGV is established according to Newton Euler equation, and an error model is established accordingly. A linear time-varying model predictive control algorithm based on AGV dynamic model is designed, and an optimization function with state increment and control increment as variables is established. The constraints of state quantity, control quantity and control increment as well as soft constraint dynamics are added. The simulation results verify the effectiveness of the controller.
Keywords:automated guided vehicle;trajectory tracking control;model predictive control
0"引言
自動導引車(automated guided vehicle,AGV)是一種無人操作的自動化搬運機器人,已被廣泛應用于倉儲運輸、醫療、軍工等多個領域[1]。由于傳統工業朝著自動化、智能化方向發展,因而對AGV的需求量也隨之增長[2]。因此,對AGV的軌跡跟蹤控制進行研究對AGV的自主導航具有很重要的意義。
目前國內外學者對AGV的軌跡跟蹤控制進行了大量的研究。楊李朋等[3]提出了改進的模糊PID方法,在模糊PID控制的基礎上, 設計出單純形法目標函數自動尋優與模糊PID控制相結合。朱時杰等[4]設計了基于線性自抗擾控制(LADRC)的軌跡跟蹤器,解決易陷入局部最優的問題。然而,現在常用的控制方法在進行預測跟蹤時,存在因計算量龐大難以滿足實時控制要求的問題,同時因為在優化求解過程中未對變量進行合理約束,無法穩定精確地跟蹤。因而需針對上述問題進行研究。
本文提出了基于AGV動力學模型的線性時變模型預測控制算法。首先,建立了AGV動力學模型,然后在此基礎上建立了AGV軌跡跟蹤誤差模型,同時采用泰勒公式進行線性化處理,采用向前歐拉法進行離散化,建立以狀態增量和控制增量為變量的優化函數,將其轉化為二次規劃問題。對優化函數添加狀態量約束、控制量約束和控制增量約束,在AGV精準跟蹤參考軌跡的基礎上提高了軌跡跟蹤的穩定性。
1"車輛動力學模型
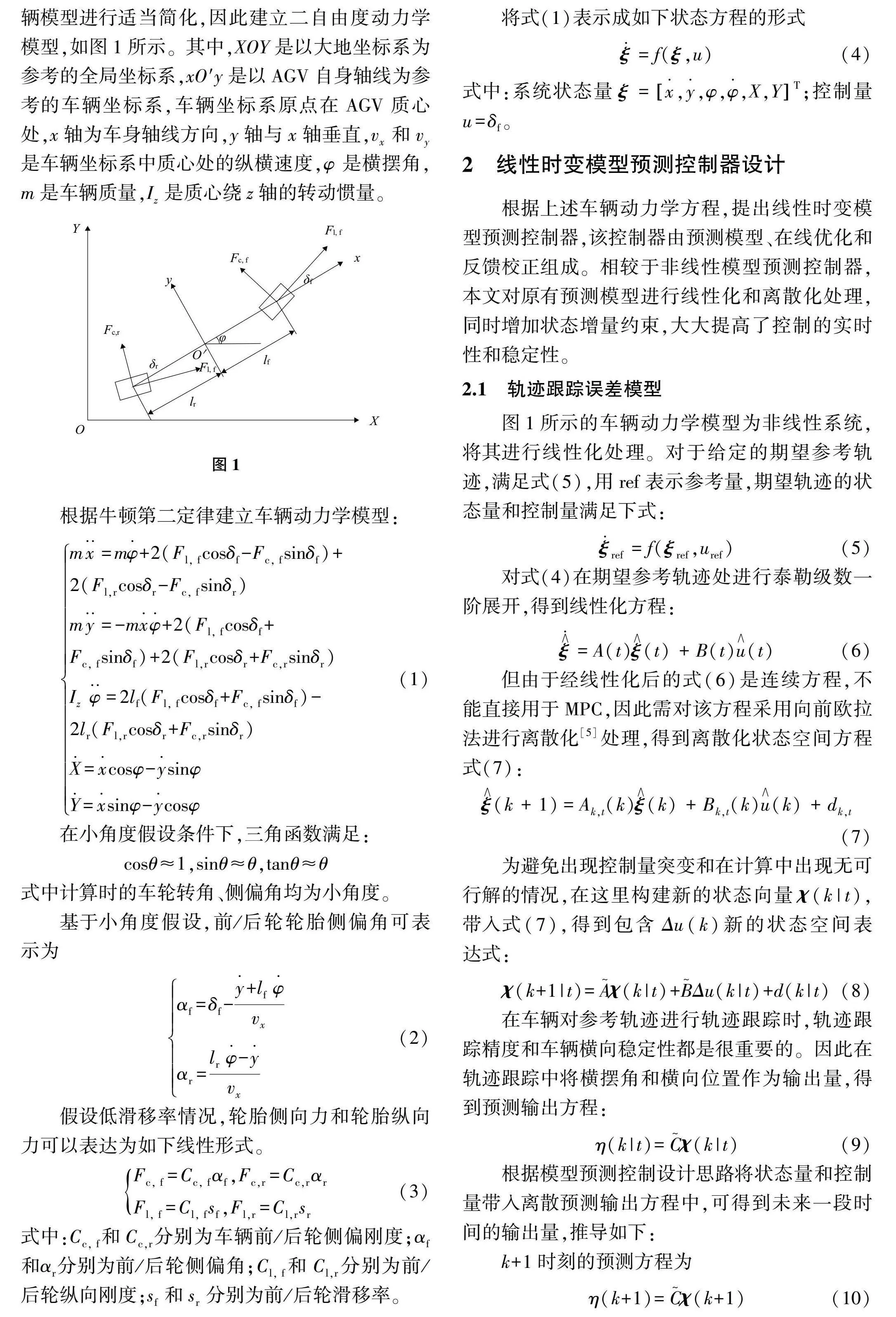
本文研究的AGV采用八輪四驅動結構設計,前后輪實現獨立驅動轉向,沿車體軸線方向均勻對稱分布4個萬向輪,提供支撐和平衡作用。基于該平臺,為提高控制算法的實時性和穩定性,在較為準確地描述車輛動力學過程的基礎上,對車輛模型進行適當簡化,因此建立二自由度動力學模型,如圖1所示。其中,XOY是以大地坐標系為參考的全局坐標系,xO′y是以AGV自身軸線為參考的車輛坐標系,車輛坐標系原點在AGV質心處,x軸為車身軸線方向,y軸與x軸垂直,vx和vy是車輛坐標系中質心處的縱橫速度,φ 是橫擺角,m是車輛質量,Iz是質心繞z軸的轉動慣量。
根據牛頓第二定律建立車輛動力學模型:
mx··=mφ·+2(Fl, fcosδf-Fc, fsinδf)+2(Fl,rcosδr-Fc, fsinδr)
my··=-mx·φ·+2(Fl, fcosδf+
Fc, fsinδf)+2(Fl,rcosδr+Fc,rsinδr)
Izφ··=2lf(Fl, fcosδf+Fc, fsinδf)-
2lr(Fl,rcosδr+Fc,rsinδr)
X·=x·cosφ-y·sinφ
Y·=x·sinφ-y·cosφ(1)
在小角度假設條件下,三角函數滿足:
cosθ≈1,sinθ≈θ,tanθ≈θ
式中計算時的車輪轉角、側偏角均為小角度。
基于小角度假設,前/后輪輪胎側偏角可表示為
αf=δf-y·+lfφ·vx
αr=lrφ·-y·vx(2)
假設低滑移率情況,輪胎側向力和輪胎縱向力可以表達為如下線性形式。
Fc, f=Cc, fαf,Fc,r=Cc,rαr
Fl, f=Cl, fsf,Fl,r=Cl,rsr(3)
式中:Cc, f和Cc,r分別為車輛前/后輪側偏剛度;αf和αr分別為前/后輪側偏角;Cl, f和Cl,r分別為前/后輪縱向剛度;sf和sr分別為前/后輪滑移率。
將式(1)表示成如下狀態方程的形式
ξ·=f(ξ,u)(4)
式中:系統狀態量ξ=x·,y·,φ,φ·,X,YT;控制量u=δf。
2"線性時變模型預測控制器設計
根據上述車輛動力學方程,提出線性時變模型預測控制器,該控制器由預測模型、在線優化和反饋校正組成。相較于非線性模型預測控制器,本文對原有預測模型進行線性化和離散化處理,同時增加狀態增量約束,大大提高了控制的實時性和穩定性。
2.1"軌跡跟蹤誤差模型
圖1所示的車輛動力學模型為非線性系統,將其進行線性化處理。對于給定的期望參考軌跡,滿足式(5),用ref表示參考量,期望軌跡的狀態量和控制量滿足下式:
ξ·ref=f(ξref,uref)(5)
對式(4)在期望參考軌跡處進行泰勒級數一階展開,得到線性化方程:
ξ∧·=A(t)ξ∧(t)+B(t)u∧(t)(6)
但由于經線性化后的式(6)是連續方程,不能直接用于MPC,因此需對該方程采用向前歐拉法進行離散化[5]處理,得到離散化狀態空間方程式(7):
ξ∧(k+1)=Ak,t(k)ξ∧(k)+Bk,t(k)u∧(k)+dk,t(7)
為避免出現控制量突變和在計算中出現無可行解的情況,在這里構建新的狀態向量χ(k|t),帶入式(7),得到包含Δu(k)新的狀態空間表達式:
χ(k+1|t)=A~χ(k|t)+B~Δu(k|t)+d(k|t)(8)
在車輛對參考軌跡進行軌跡跟蹤時,軌跡跟蹤精度和車輛橫向穩定性都是很重要的。因此在軌跡跟蹤中將橫擺角和橫向位置作為輸出量,得到預測輸出方程:
η(k|t)=C~χ(k|t)(9)
根據模型預測控制設計思路將狀態量和控制量帶入離散預測輸出方程中,可得到未來一段時間的輸出量,推導如下:
k+1時刻的預測方程為
η(k+1)=C~χ(k+1)(10)
將式(8)帶入式(10)中,得η(k+1)=C~Aχ(k)+C~Bχ(k)+C~d(k)
以此類推,可得到在k,k+Np時刻內的預測方程,將推導得到的預測方程以矩陣的形式表達,可以得到系統的離散預測輸出表達式:
Y(k)=Ψχ(k)+ΘΔU(k)+ΩD(k)(11)
式中ΔU(k)=[Δu(k)"Δu(k+1)"…"Δu(k+Nc)]T
基于上式,可以求解系統當前的狀態量χ(k)和控制增量ΔU(k),以獲得預測時域Np內的狀態量和輸出量,從而實現預測功能。
2.2"目標優化函數
在軌跡跟蹤過程中,為了使車輛平穩精確地跟蹤期望軌跡,需得到最優控制量,而在控制時域內的最優控制量只能通過求解目標函數得到。若在設定目標函數時只考慮對控制量進行約束,不能控制控制量的跳變,這樣會在跟蹤時車身不穩,因而應將控制增量作為優化函數狀態量。同時,由于車輛動力學模型的復雜度較高,易出現沒有最優解的情況,因而在目標函數中加入松弛因子。為了方便計算,本文將目標優化函數設定為如下二次規劃形式:
J(ξ∧(k),u(k-1),Δu(k))=
∑Npi=1y(k+ik)-yref(k+ik)Q2+∑Nc-1i=1Δu(k+ik)R2+ρε2(12)
式中:Np表示預測時域;Nc表示控制時域;Q和R分別是輸出量和控制量變化的加權矩陣;ρ是權重因子;ε是松弛因子;y(k+ik)是控制預測輸出值;yref(k+ik)是參考預測輸出值;Δu(k+ik)是控制增量。
在實際的系統中,考慮到車輛執行機構有一定的輸出范圍,需對系統的狀態量、控制量添加約束條件:
ξmin(k)≤ξ(k)≤ξmax(k)(13)
umin(k)≤u(k)≤umax(k)(14)
為了保證車輛能夠平穩跟蹤期望軌跡,需使控制量穩定變化,本文增加對控制增量進行約束:
Δumin(k)≤Δu(k)≤Δumax(k)(15)
為了方便預測時域里狀態量和輸出量的求解,將式(11)帶入式(12)目標優化函數中,定義Yref(k)為參考輸出,可以得到如下優化方程表達式:
J=[Y(k)-Yref(k)]TQ[Y(k)-Yref(k)]+
ΔU(k)TRΔU(k)+ρε2(16)
為簡化計算,將其化為標準二次型形式:
J=12[ΔU(k)T,ε]TH(k)[ΔU(k)T,ε]+G(k)[ΔU(k)T,ε](17)
由于式(13)—式(15)的約束方程中,約束對象不統一,為將約束條件的變量統一,可將約束轉化為如下形式:
Ymin(k)-ε≤Y(k)≤Ymax(k)+ε
Umin(k)≤AΔU(k)+U(k)≤Umax(k)(18)
在每個周期完成優化求解后,可以得到Np內的控制輸入增量和松弛因子。將控制增量序列里的第一個控制增量作用于系統,獲得當前的最優控制量:
u(k|k)=u(k-1|k)+Δu*(k|k)(19)
為了保證車輛能夠平穩跟蹤期望軌跡,需使控制量穩定變化,本文對控制增量添加約束:
ΔUmin(k)≤ΔU(k)≤Umax(k)(20)
3"仿真分析
為了驗證算法的有效性,對軌跡跟蹤控制進行了仿真實驗。在AGV實際運行過程中, Np=20,Nc=5,ρ=1 000。
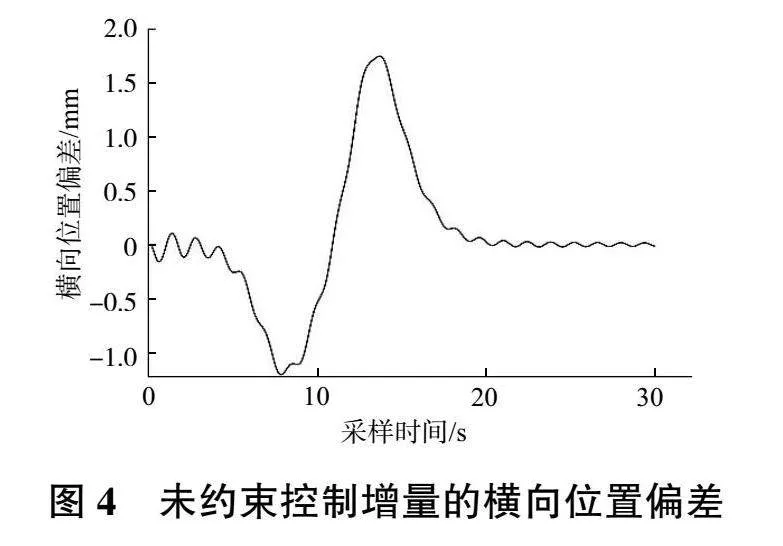
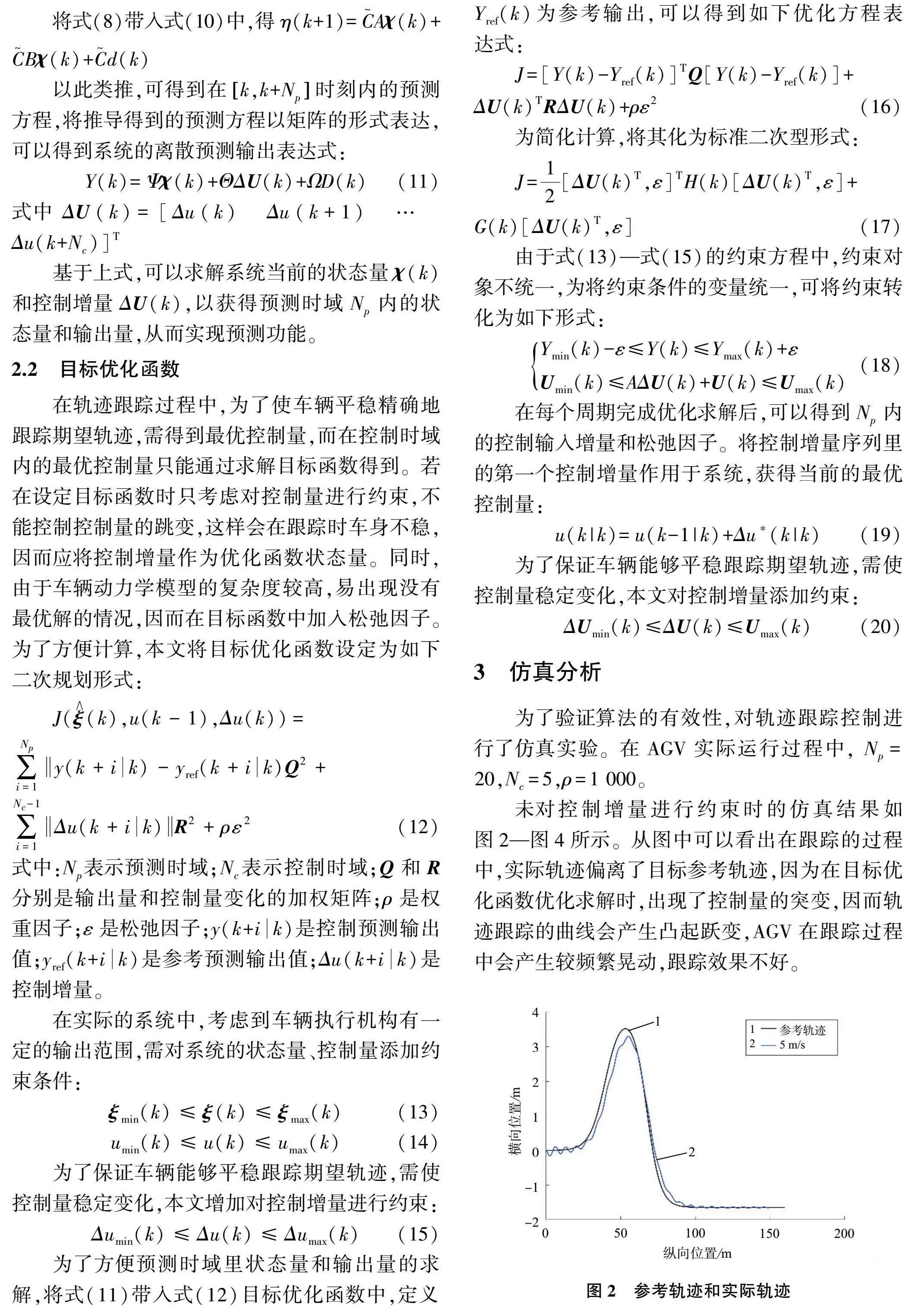
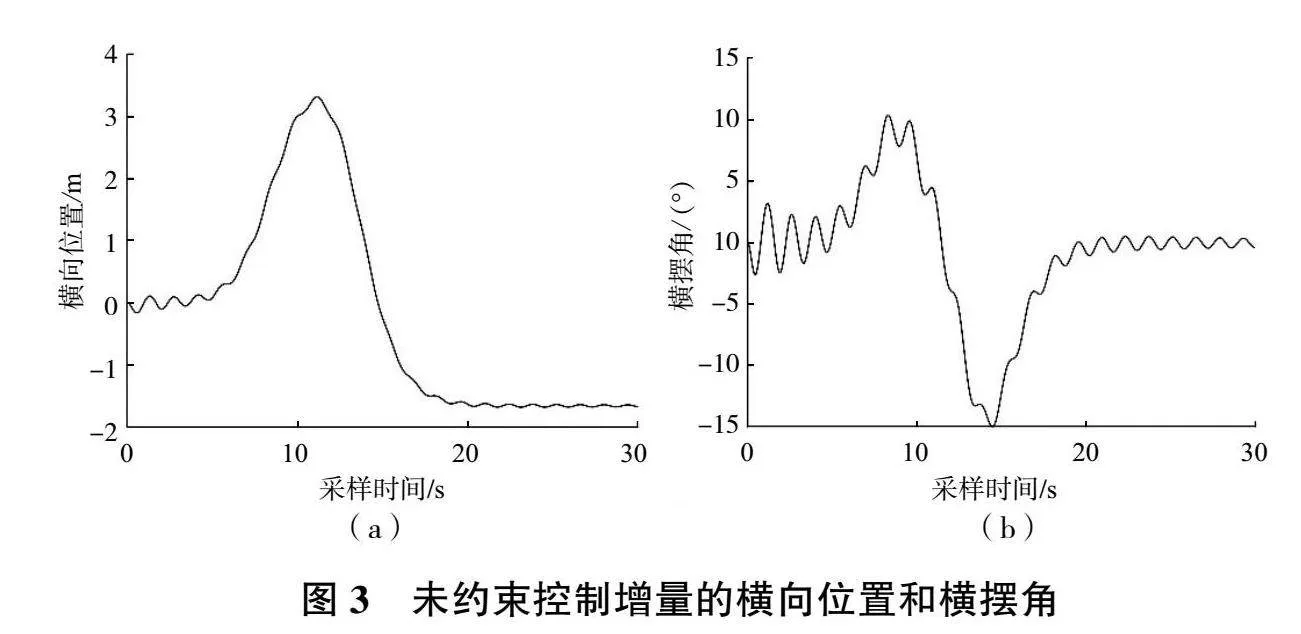
未對控制增量進行約束時的仿真結果如圖2—圖4所示。從圖中可以看出在跟蹤的過程中,實際軌跡偏離了目標參考軌跡,因為在目標優化函數優化求解時,出現了控制量的突變,因而軌跡跟蹤的曲線會產生凸起躍變,AGV在跟蹤過程中會產生較頻繁晃動,跟蹤效果不好。
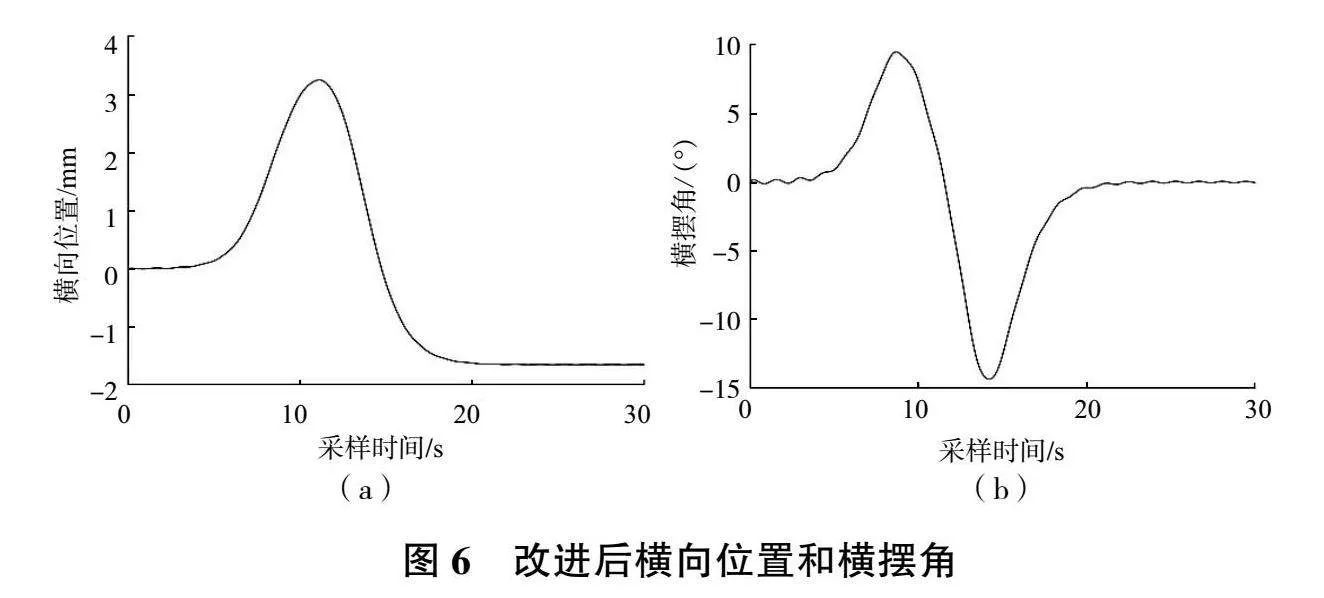
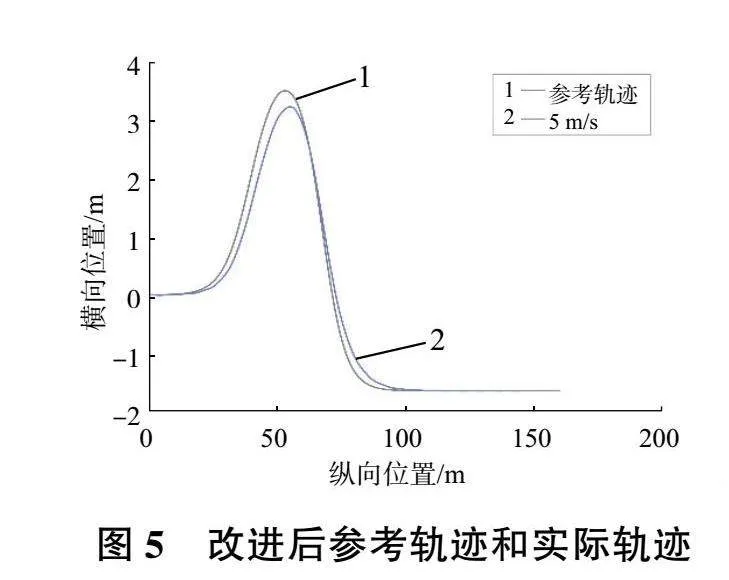
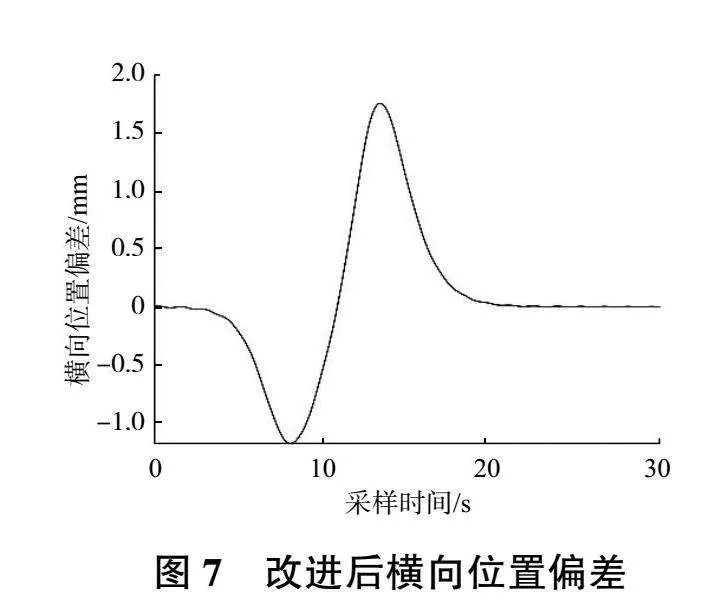
對控制增量進行約束后的仿真結果如圖5—圖7所示。從圖中可以看出,當對控制增量進行限制后,改進后的軌跡跟蹤算法能平穩精準地跟蹤參考軌跡,有效地改善了跟蹤效果。
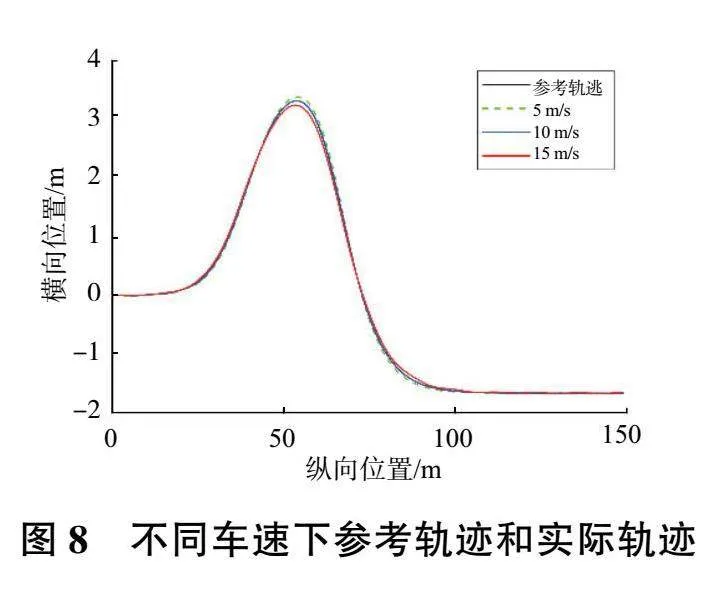
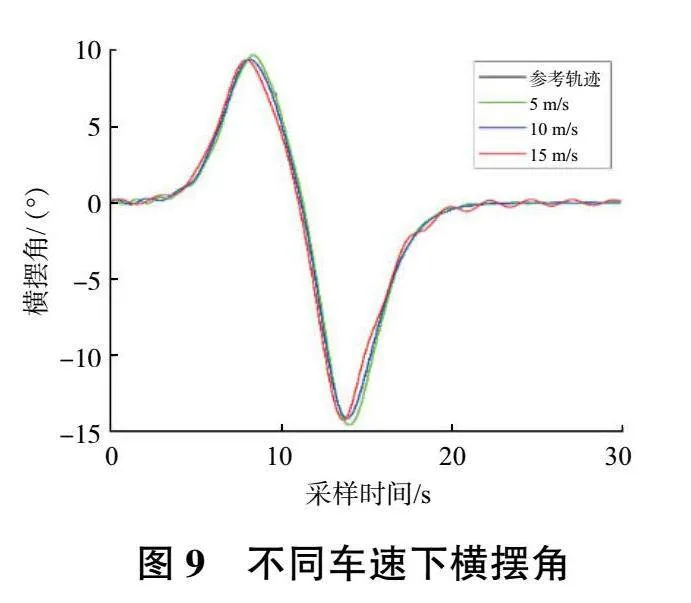
為驗證該控制算法對行駛速度具有良好的魯棒性,將不同車速下的仿真結果進行對比分析控制效果,如圖8、圖9所示(本刊黑白印刷,相關疑問咨詢作者)。從圖中可以看出當AGV以5m/s、10m/s、15m/s的速度對參考軌跡都能進行較好地跟蹤,只是在彎道部分與參考軌跡會有些許偏差,但最后都能將偏差收斂為0,驗證了該控制器在不同速度下都有良好的跟蹤效果。
4"結語
本文以AGV二自由度動力學模型為基礎,建立模型的狀態空間方程,在模型預測控制的框架下建立了軌跡跟蹤誤差模型,構造了二次規劃方程形式的目標優化函數。根據AGV機械特性限制,在文獻控制算法的基礎上,對控制增量進行約束,有效地改進了軌跡跟蹤性能,使AGV能夠精準穩定地跟蹤參考軌跡。最后,通過仿真對該控制器進行了驗證。為將來軌跡跟蹤控制研究提供了參考。
參考文獻:
[1] 王浩吉,楊永帥,趙彥微. 重載AGV的應用現狀及發展趨勢[J]. 機器人技術與應用,2019(5):20-24.
[2] 張滬松,樓佩煌,朱立群,等. 基于組合趨近律的差速AGV高精度路徑跟蹤技術研究[J]. 機械制造與自動化,2019,48(6):186-190.
[3] 楊李朋,張文豐,王昊. 基于改進模糊PID的AGV軌跡跟蹤研究[J]. 工業控制計算機,2017,30(8):117-119.
[4] 朱時杰,郭青. 基于線性自抗擾的AGV軌跡跟蹤控制器設計及參數優化[J]. 北京化工大學學報(自然科學版),2017,44(4):95-100.
[5] 劉豹,唐萬生. 現代控制理論[M]. 3版. 北京:機械工業出版社,2006.
收稿日期:20220922
