基于PID的液壓盤式剎車系統的優化與仿真
2024-08-31 00:00:00薛凱琳王小龍鄭凱
機械制造與自動化 2024年3期
關鍵詞:仿真

















摘 要:以提高液壓盤式剎車系統的穩定為目標,提出一種具有PID反饋環節的自適應控制系統。闡述液壓盤式剎車系統的基本結構與參數;構建液壓盤式剎車系統的數學模型,以單神經網絡算法為基礎,完成PID控制環節的優化設計;利用AMESim軟件,以傳感器、電磁比例換向閥、PID控制環節為核心構建自適應控制系統的仿真模型并進行仿真分析。結果證明:PID控制系統提高了液壓盤式剎車系統的響應速度與穩定性。
關鍵詞:液壓;盤式剎車;PID;仿真
中圖分類號:TP391.9文獻標志碼:B文章編號:1671-5276(2024)03-0158-05
Optimization and Simulation of Hydraulic Disc Brake System Based on PID
Abstract:With the aim of improving the stability of hydraulic disc brake system, an adaptive control system with PID feedback link is proposed. The basic structure and parameters of the hydraulic disc brake system are described. The mathematical model of the hydraulic disc brake system is constructed, and the optimization design of PID control link is completed based on the single neural network algorithm. With AMESim software, the simulation model of the adaptive control system is built based on the sensor, electromagnetic proportional directional valve and PID control link , and its the simulation analysis is carried out. The results show that PID control system improves the response speed and stability of hydraulic disc brake system.
Keywords:hydraulic pressure; disc brake; PID; simulation
0 引言
剎車系統作為工程機械與設備進行正常工作的重要組成,其系統的穩定性與響應速度直接影響著設備的平穩運行,而傳統的液壓盤式剎車系統因其響應效果差、響應速度慢,己無法滿足使用者的要求[1-2]。因此,如何在保證液壓盤式剎車系統原有性能的同時,提高其系統的響應速度與穩定性,成為值得研究的問題。本文設計了一種提高液壓盤式剎車系統運行穩定性與可靠性的自動控制系統。通過PID反饋環節對液壓盤式剎車系統中的電磁比例換向閥進行有效控制,提高液壓盤式剎車系統在外部載荷不斷變化等特殊條件下的可靠性,提高液壓盤式剎車系統的使用范圍與效率。
設計目標:
1)液壓盤式剎車系統的建模;
2)單神經網絡PID算法的優化;
3)液壓盤式剎車系統PID控制環節仿真實驗。
1 液壓盤式剎車的結構與參數
1.1 基本結構
本文以PSZ75型液壓盤式剎車系統[3]為例,基本構成如圖1所示。
1.2 基本參數
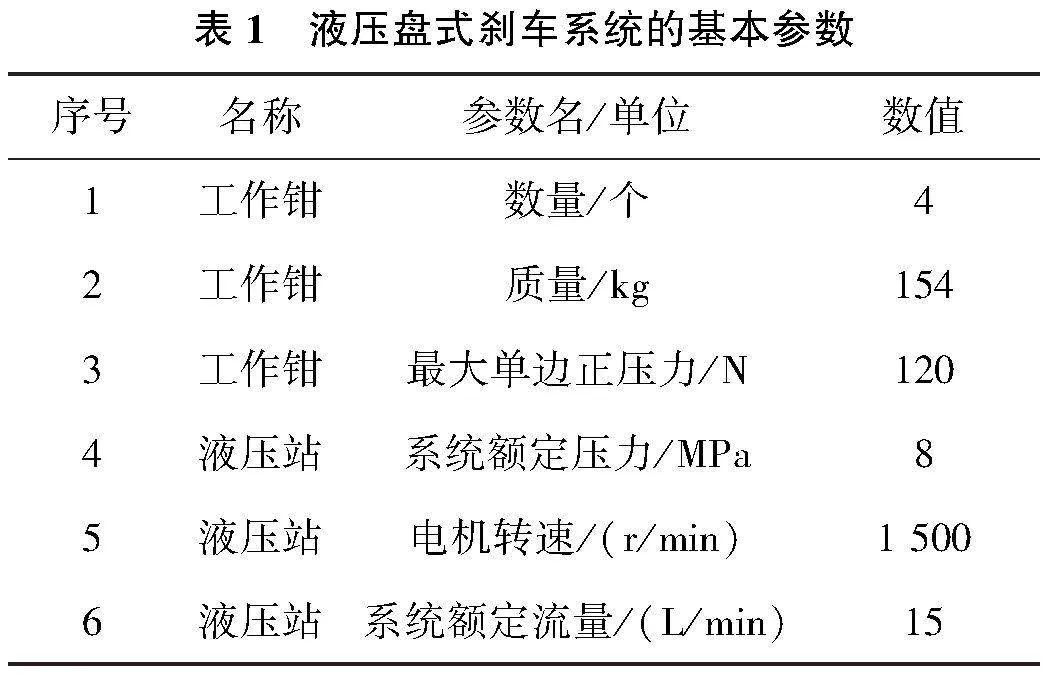
選取PSZ75型液壓盤式剎車系統數據,以工作鉗[4]的工作過程為研究對象,基本參數如表1所示。
2 液壓盤式剎車的數學模型與受力分析
2.1 數學模型
本文以工作鉗液壓缸的結構為基礎,通過分析將工作鉗等效為閥控單作用缸[5]。工作鉗的簡化模型如圖2所示。圖中:A1為無桿腔面積;A2為有桿腔面積;M為質量塊。
如圖2所示,對進入(流出為負)工作鉗液壓缸的流量Q進行分析[6],工作鉗的數學模型為
式中:β為液體彈性模量,MPa;
V0為制動液壓缸的初始速度,mm/s;
FJ為作用在活塞上的外負載力,kN;
AP為活塞有效作用面積,mm2;
xP為活塞位移變化量,mm。
進行制動時,工作鉗液壓缸通過調節制動壓力來調節制動力矩的大小從而實現制動效果。當處于平衡狀態時,活塞的位移、加速度、速度均設為0,這時可以近似認為工作鉗液壓缸復位彈簧的反抗力為定值,既等效到活塞上的力為定值。
這時在封閉液壓缸容積中活塞的運動速度:
V=Apxp+V0(2)
設溫度不變,則式(1)中工作鉗液壓缸的工作流量可簡化為
由式(3)可知,進入或者流出工作鉗液壓缸的流量等于流過電磁比例閥的流量,因此通過對電磁比例換向閥的有效控制,就能夠有效控制制動壓力,增強液壓剎車系統的穩定性與響應速度。
2.2 受力分析
結合圖1、圖2中液壓盤式剎車系統的基本結構,利用AMEsim繪制單個工作鉗剎車系統的仿真模型[7],如圖3所示。
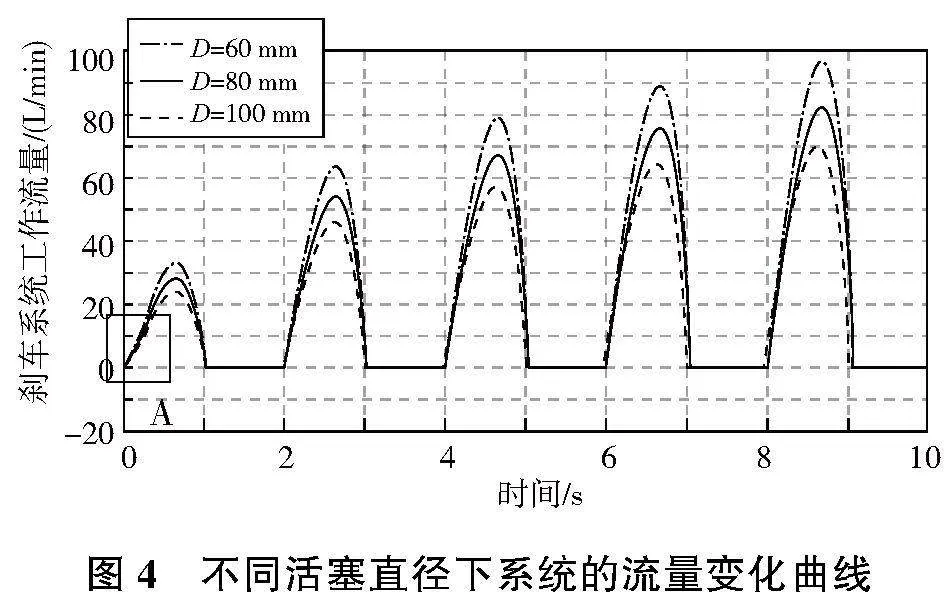
在AMEsim仿真環境中,按照表1設定了單個工作鉗系統的基本參數,并選取頻率為0.5Hz、振幅為5MPa的液壓源為激勵信號,同時進行了仿真實驗,分別得到了不同活塞直徑(60mm、80mm和100mm)下剎車系統的流量變化曲線,如圖4所示。圖4A處的局部放大圖如圖5所示。
通過AMEsim仿真,由圖4可知,剎車系統工作時存在一定的延遲現象。由圖5可知,液壓缸直徑越大,單位時間內的流量越小,剎車系統的制動響應速度越慢,說明液壓缸體積(缸徑)的變化與剎車系統工作流量間存在比例關系。
通過圖4的仿真結果,得到了剎車系統在不同缸徑與不同時刻的流量值和平均變化量,如表2所示。
本文在表2的基礎上,構建了比例系數k的數學模型,利用MATLAB分析[8]得到了比例系數。
可得:k≈0.21。
由式(4)可知,單一的比例控制環節存在一定的局限性,在進行權值選取與確定時會耗費較長時間,進而降低了系統的響應速度。而不能忽略的是,實際制動過程的復雜性,因其外部負載處于不規律的連續變化中。因此本文以神經網絡算法為基礎,提出了單神經網絡PID算法,并將其應用于液壓盤式剎車系統中以提高其性能與效果。
3 單神經網絡PID算法
在實際的工程應用中,液壓盤式剎車系統通常由多個工作鉗參與制動,因此將單神經網絡與PID算法結合起來,實現PID控制器參數的實時整定,彌補了單一比例控制策略的不足,使得液壓盤式剎車系統具有更強的適應性[9]。其控制框圖如圖6所示。
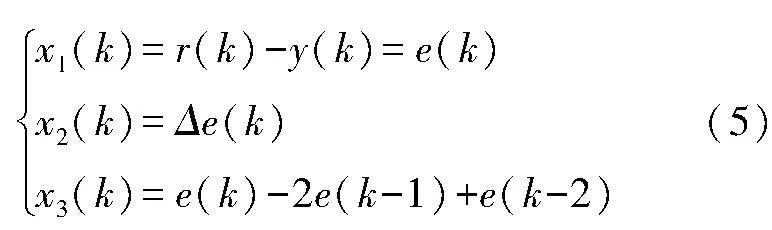
對期望值為r(k)與實際輸出y(k)進行信號處理并得出單神經元網絡所需的3個狀態變量x1(k)、x2(k)、x3(k)。
式中k為比例系數,取k=0.35,則控制信號為
式中ωi(k)為xi(k)的加權系數。主要通過加權系數的調整實現PID參數自適應整定。采用有監督Hebb學習算法如下:
ωi(k+1)=(1-c)ωi(k)+η(e(k)u(k)xi(k))(7)
式中:(k)為誤差信號;e(k)=r(k)-y(k);c為常數,0≤c≤1,c取0.1。因此權值修正量Δωi(k)可由下式表示:
控制量u(k)為:
式中:比例環節學習速率ηP=0.21;積分環節學習速率ηI=0.18;微分環節學習速率ηD=0.11。
通過PID反饋環節,控制系統成比例釋放流量,進而達到穩定系統壓力,提高液壓盤式剎車系統穩定性的目的。
4 液壓盤式剎車系統的優化與仿真
本文運用AMEsim軟件通過繪制系統草圖、建立子模型、參數設置、運行仿真4個環節[10],建立減震系統的仿真模型并進行了仿真實驗,得到了相應的特性曲線。
4.1 建立仿真模型
結合圖3單個工作鉗剎車系統的仿真模型,搭建了整個液壓盤式剎車系統的PID控制優化模型,如圖7所示。
依據表1、圖7,本文給出了PID系統仿真模型的基本參數,如表3所示,為后續的仿真提供依據。
4.2 系統的仿真與分析
1)系統仿真
本文依據4.1中的仿真模型,按照表3中的參數,進行了不含PID環節的設置并進行仿真,得到相應的特性曲線。
a)液壓盤式剎車系統工作壓力
液壓盤式剎車系統工作壓力特性曲線,如圖8所示。
由圖8可知,液壓盤式剎車系統采用PID控制方式時,系統工作壓力明顯高于傳統的控制方式,同時系統工作壓力的變化過程更加平穩,無明顯的壓力波動,進而提高了剎車系統的穩定性。其次,PID控制使系統的響應速度明顯提高,其工作壓力達到穩定輸出時所用的時間進一步減少。
b)液壓盤式剎車系統工作流量
液壓盤式剎車系統工作流量特性曲線,如圖9所示。
由圖9可知,液壓盤式剎車系統采用PID控制方式時,系統工作流量在對應時刻的值明顯高于傳統的控制方式,進而保證了剎車系統的所需壓力。同時,系統的響應速度明顯提高,對系統延遲有了一定的抑制作用。
2)系統分析
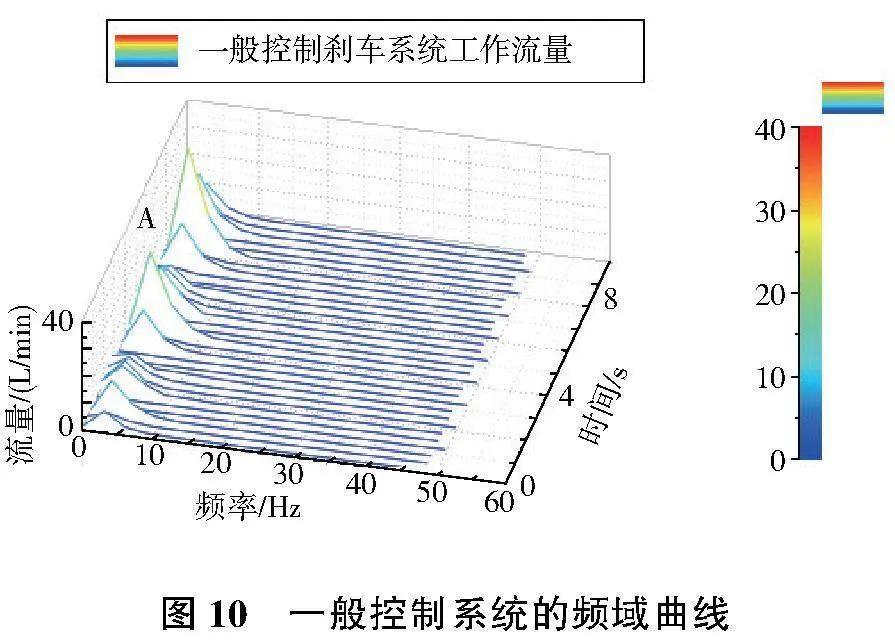
依據圖9中的仿真運行結果,分別對2種控制系統的運行結果進行頻域分析并對結果進行比較,如圖10和圖11所示。
通過頻域分析發現,兩種系統在剎車系統進行制動的開始階段都出現了一定的延遲。隨著時間的推移,兩種系統逐漸進入穩定工作狀態,這時圖10中A處的流量波動依然較為明顯。而這時,在相同時間PID自適應控制系統也進入了穩定工作狀態,這時將圖11中B處的流量狀態與圖10中A處相比較顯示圖11系統流量更加穩定。通過分析證明,PID自適應控制系統提高了液壓盤式剎車系統的響應速度與穩定性。
5 結語
本文首先分析了液壓盤式剎車系統的結構,建立了對應的數學與仿真實驗模型。通過分析與仿真發現:當外部負載連續變化時,傳統的控制方式引起了液壓缸有效體積的不穩定變化,造成液壓盤式剎車系統的響應速度較低,影響了液壓盤式剎車的使用,其次,針對這一問題,以單神經算法為理論基礎,以傳感器、PID控制環節為核心設計了一種具有PID反饋環節的自適應控制系統,通過PID反饋環節的控制,提高剎車系統響應速度,進而達到提高系統穩定性與響應速度的目的。最后,以AMESim為手段搭建了PID自適應控制系統的仿真模型并進行了仿真實驗,通過實驗結果的對比分析表明,PID控制系統提高了液壓盤式剎車系統的響應速度,保持了系統所需的工作流量與壓力,提高了系統運行的可靠性,同時增強了設備的適用性,因此本設計具有一定的應用價值。
參考文獻:
[1] 喬福家. 鉆機液壓盤式剎車系統工作原理與維護分析[J]. 設備管理與維修,2022(10):54-56.
[2] 周遠宏. 鉆機液壓盤式剎車系統工作原理與維護淺析[J]. 中國石油和化工標準與質量,2020,40(2):123-124.
[3] 李順. PSZ75液壓盤式剎車系統的設計與研究[D]. 東營:中國石油大學(華東),2016.
[4] 文娟,肖蘇宸. PSZ65液壓盤式剎車工作鉗設計[J]. 電子制作,2015(5):83-84.
[5] 錢占松. 三通閥控單作用缸在電液位置伺服系統的應用研究[J]. 液壓與氣動,2020(6):127-134.
[6] 栗君. 壓縮式垃圾車液壓油流量增加對其溫度的影響[J]. 汽車與駕駛維修(維修版),2022(3):28-31.
[7] 李資,張海麗. 基于AMESim-Matlab的伺服電機速度-壓力回路仿真研究[J]. 機械制造與自動化,2021,50(6):135-137.
[8] 李小偉,高清冉. 基于MATLAB的汽車懸架系統參數分析[J]. 濟源職業技術學院學報,2022,21(1):47-50.
[9] 王琳,王文博,錢愛文. 神經網絡模糊PID控制半主動懸架系統[J]. 洛陽理工學院學報(自然科學版),2022,32(2):65-72.
[10] 曹亞楠. 基于AMESim的大流量安全閥動態特性分析與仿真[D]. 西安:西安科技大學,2014.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
