基于在機測量點集配準的工件位姿自適應調整算法
2024-08-31 00:00:00賈壯軍李勇
機械制造與自動化 2024年3期
關鍵詞:控制








摘 要:針對工件位姿變化所導致的加工輪廓誤差控制問題,設計一種基于在機測量點集的配準算法。在理論測量面與實際測量面上分別選取參考測量點建立對應的局部坐標系,通過坐標系重合實現初始配準;通過初配準后的測量點集建立基于最小二乘距離的目標函數,利用自適應差分進化算法獲得精確配準矩陣。根據兩次配準結果計算工件位姿的調整矩陣。通過實例對算法進行驗證,結果表明:所提算法可以較好地實現加工坐標系的調整,有利于加工輪廓誤差控制。
關鍵詞:在機測量;數據配準;輪廓誤差;控制
中圖分類號:TH164;TP399文獻標志碼:B文章編號:1671-5276(2024)03-0190-05
Adaptive Adjustment Algorithm for Workpiece Posture Based on Registration of On-machine Measurement Point Set
Abstract:For the control of workpiece contour errors resulting from the change of workpiece posture, a matching algorithm based on on-machine measurement data is designed. The reference points on the theoretical and actual measured surfaces are selected to build local coordinate systems, and the initial matching is achieved by aligning the local coordinate systems. The objective function based on the least square method is established by the point sets after the initial matching. The optimal transformation matrix can be acquired by self-adaptive differential evolution algorithm. The posture adjustment matrix of workpiece can be achieved by the two matching results. The algorithm is verified through practical application.The results show that the designed algorithm can complete the adjustment of machining coordinate system, and contributes to the effctive control of contour errors.
Keywords:on-machine measurement; data matching; contour errors; control
0 引言
在多工序機械加工中,由于多次裝夾、加工變形等原因,工件位姿容易發生變化,從而導致工件加工輪廓誤差超差。因此有必要尋找一種便捷有效的算法以控制工件的輪廓誤差。算法的關鍵是實現實際工件與理論模型之間的精確配準,即通過坐標變換,使工件坐標系(workpiece coordinate system, WCS)與加工坐標系(machining coordinate system, MCS)盡可能保持一致。隨著在機測量技術的廣泛使用[1],理論數據與實際數據的獲取更為方便、可靠,使得模型數據配準精度進一步提高。
關于配準算法,BESL等[2]最先提出了迭代最近點(ICP)算法,該算法被廣泛應用于點云配準,在特定的初始條件下能夠較好地實現曲面配準,但對兩點集初始位置要求較高,且計算量較大。在傳統ICP算法基礎上,近年來有眾多研究者對其進行了相關的改進[3-4]。LIU[5]提出了一種新的自由曲面配準算法,該算法通過基于共線性和相似性約束條件建立的傳統ICP準則來直接處理可能的點配準;FITZGIBBON[6]采用LM 算法(levenberg-marquardt algorithm)解決點集配準問題,其求解效率與ICP算法相當。針對三維點云數據,GE等[7]提出了基于非線性Gauss-Helmert模型和非線性最小二乘的點云數據配準算法,并完成相關三維模型的重構,該算法在收斂速度和配準精度上優于ICP算法;張文麗等[8]為提高現有點云配準算法在真實點云數據的配準精度,提出了一種三階段的基于AGConv局部特征描述符的點云配準方法。
機械加工中,配準主要用于工件的余量優化、工件位姿調整、識別。YAN等[9]為解決數控加工中復雜曲面類工件的定位問題,提出了兩步配準法,算法分為粗配準與精確配準,在精確配準中引入了遺傳算法(GA);張瑩等[10]針對復合制造工藝背景下葉片毛坯形狀復雜、余量分布不均的特點,提出基于加工中心在線測量的葉片裝夾定位與余量優化算法;劉孝龍[11]針對自由曲面配準問題,首次將曲率索引引入到配準技術中,實現基于曲率Hausdorff距離的初始配準和改進迭代最近點算法的配準優化;韓德川[12]針對現有點云匹配算法無法很好地用于部件位姿調整的問題,提出了基于加權距離投票的點云匹配算法; MEHRAD等[13]通過粗定位與精確定位,實現了基于曲率和距離相似性的點到設計模型的配準,但需要B樣條曲面重構;潘海鴻等[14]針對工業環境下識別無序擺放工件時存在的識別準確率低與配準時間長等問題,提出一種頻域的四維向量匹配方法(FDVM),識別無序擺放工件的位姿。
上述配準算法能夠實現工件姿態調整計算,但在配準中需要大量點云數據或相應的表面參數方程及其他相關表面特性參數,主要適用于光學掃描測量。而對于少量在機測量點的配準,相關算法及在工程應用方面的研究較少。本文結合在機測量技術,開發了基于在機測量點集的分步配準算法,并通過計算工件位姿的最優調整參數,實現工件加工輪廓誤差控制。
1 配準算法流程
設工件測量面實際測量點集為P={Pi |i=1,2,…,n},理論測量點集為Q={Qi |i=1,2,…,n},則P到Q的配準可以表示為
Qi=PiR+T(1)
式中:R為空間旋轉變換矩陣;T為平移變換矩陣。算法流程如下:
1)通過工件的在機測量規范,獲取測量點集Q和P;
2)在測量點集Q和P上分別選取3個對應的參考點,建立理論與實際局部坐標系;
3)初始配準通過局部坐標系的對齊實現初始配準,并計算獲取初始配準矩陣R0和T0;
4)利用式(2)對實際點集P進行坐標變換,獲得新的實際點集P′;
P′=PR0+T0(2)
5)構建目標函數,進行精確配準,獲得精確配準矩陣R1和T1;
6)按式(3)計算工件位姿的最終變換矩陣R和T。
2 初始配準
初始配準是為了減小理論與實際測量面之間的姿態誤差,以使后續優化算法能更快收斂,提高解的精度。
2.1 砂輪位姿計算方法
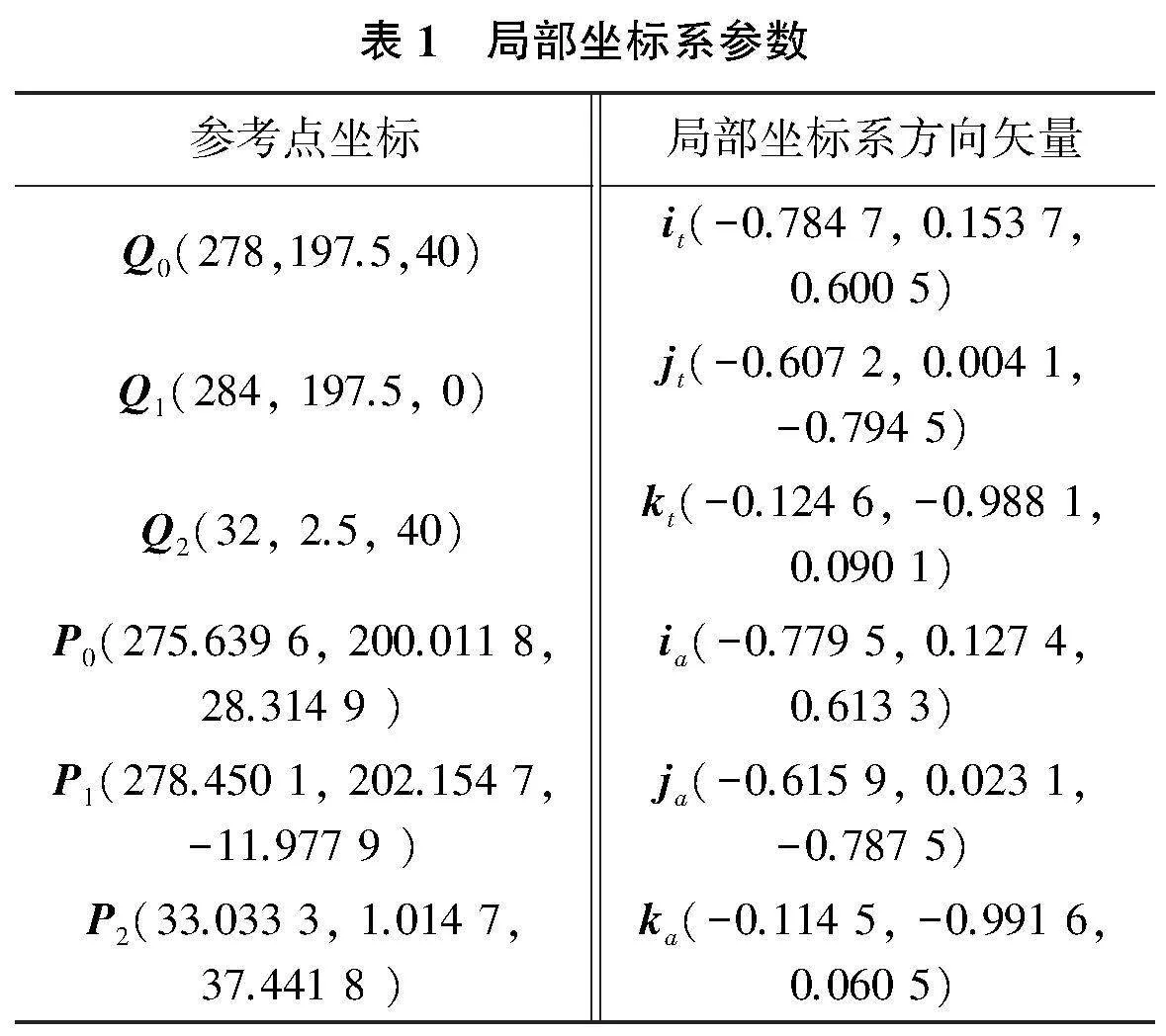
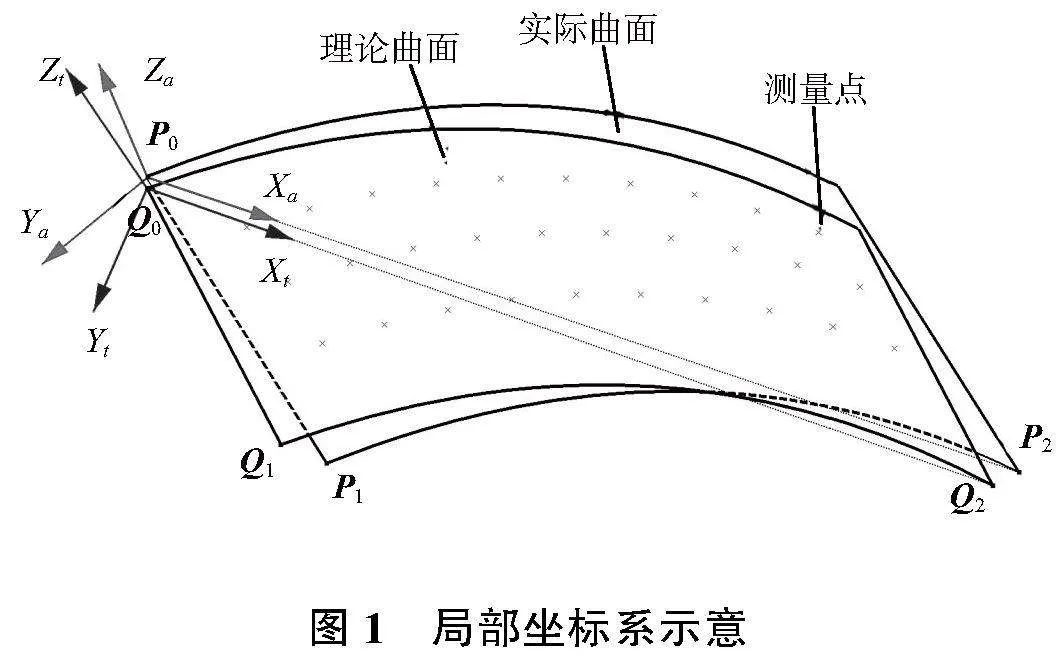
初始配準是通過理論與實際局部坐標系的對齊實現的,所以建立能夠表示測量面空間姿態的局部坐標系至關重要。如圖1所示,理論曲面與實際曲面之間存在位姿誤差。在理論曲面與實際曲面上分別選取Q0、Q1、Q2和P0、P1、P2作為參考點。通常情況下,參考點由3個不共線的點構成,且盡可能地分布在其他測量點的外側,使其最大程度地包括被測量面,只有這樣才能建立能夠比較準確表示測量面空間姿態的局部坐標系。根據參考點可以確定各局部坐標系x、y、z軸的單位方向矢量,據此建立局部坐標系,具體算法如下。
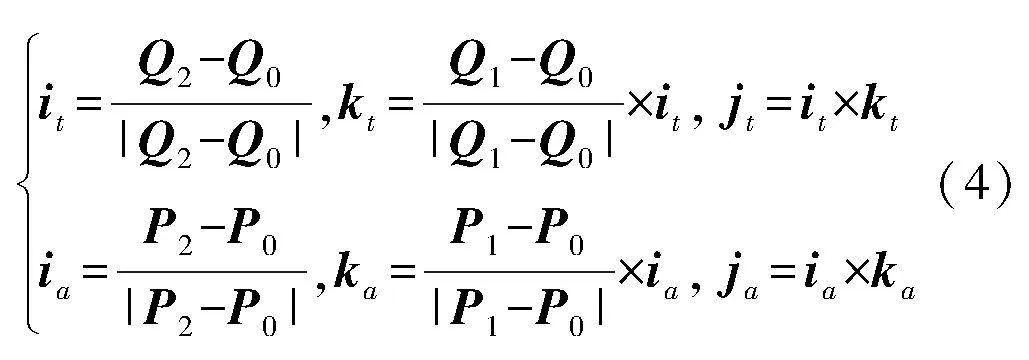
設ia、 ja、ka為實際局部坐標系x、y、z軸單位方向矢量,P0為原點;it、 jt、kt為理論局部坐標系x、y、z軸單位方向矢量,Q0為原點。則有:
根據式(4)可以求得坐標系各軸的單位方向矢量,建立如圖1所示的實際局部坐標系P0-XaYaZa和理論局部坐標系Q0-XtYtZt。
2.2 初始配準矩陣的求解
理論上,初始配準后實際與理論局部坐標系完全重合,因此兩局部坐標系與初始配準矩陣之間存在式(5)所示關系:
式中R0為初始配準矩陣,其形式如式(6)所示。
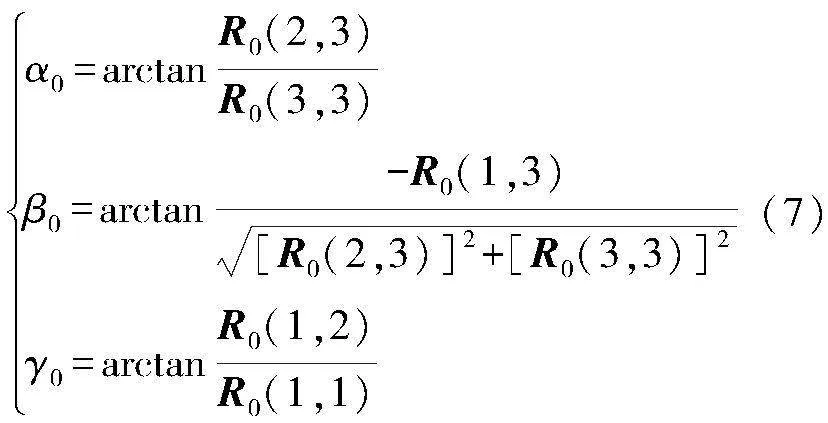
根據式(5)、式(6)可求得R0,結合R0的數學表達式,可以求得實際曲面與理論曲面之間的方向誤差(即實際測量點相對于理論坐標軸Xt、Yt、Zt的旋轉角度α0、β0 、γ0),其計算結果如式(7)所示。
式中R0(i, j)為矩陣R0第i行第j列的元素(i, j=1, 2, 3)。
坐標系P0-XaYaZa 相對于Q0-XtYtZt的平移量T0=tx0ty0tz0可由式(8)計算:
式中:μ′0為實際測量面質心坐標,即實際測量點集坐標平均值;μ為理論測量面質心坐標,即理論測量點集坐標平均值。
3 精確配準
精確配準矩陣將配準計算轉化為最優值求解問題,通過優化可確定最佳的空間變換參數,即3個旋轉量α1、β1、γ1和3個平移量tx1、ty1、tz1,進而確定精確配準矩陣T1和R1,其中T1和R1的表達式分別如式(9)和式(10)所示。
3.1 構建目標函數
初始配準后,實際測量點集P轉換為P′,定義為P′=P′ii=1,2,…,n。精確配準是為了搜索最佳配準矩陣R1和T1,使點集P′在誤差允許范圍內最大程度接近理論測量點集Q。精確配準后可獲得新的實際測量點集P″。通常情況下,采用理論點集Q與點集P″之間平均距離的平方誤差來衡量配準結果。因此,精確配準可以歸結為最小化問題,根據最小二乘原理可建立式(11)所示目標函數。
目標函數包含3個旋轉量α1、β1、γ1和3個沿軸平移量tx1、ty1、tz1,且屬于非線性問題。為了
3.2 優化求解
采用自適應差分進化算法(self-adaptive differential evolution, SADE)對目標函數進行優化求解。SADE算法相比傳統的優化算法能在保證計算精度的同時具有計算時間少、魯棒性高的特點。本文采用SADE算法求解精確配準的最優值。SADE算法優化操作主要包括變異、交叉、選擇及邊界條件的處理,其關鍵參數主要包括種群規模NP、變異算子F、交叉算子CR、變量維數D、最大進化代數Gm、變量邊界值等。
1)自適應變異算子設計
自適應變異算子F∈[0,2]是一個實常數因數,控制偏差變量的放大作用[15-16],其設計如式(13)所示。
式中:F0為初始變異算子;Gm為最大進化代數;G表示當前進化代數。
由式(13)可知,在算法開始時G=1,自適應變異算子為2F0,具有較大值,在初期可以保持個體多樣性,避免早熟。隨著算法的進展,變異算子逐步降低,到后期其值接近F0,則可以保留優良信息,避免最優解遭到破壞,增加搜索到全局最優解的概率。
2)自適應交叉算子設計
自適應交叉算子CR的設計如式(14)所示。其中,CR∈ [0,1],CR,min與CR,max分別為CR的最小值與最大值。
通常,CR越大,越容易發生交叉,有利于局部搜索和加快收斂速度;CR較小,有利于保持種群多樣性和全局搜索[17-18]。由式(14)可知,隨著進化代數增加,CR逐漸增大。這樣,在算法開始階段可以更好地保證種群多樣性,進行全局搜索,而在后期,可以加強算法的局部搜索能力,以提高算法精度。
3)優化變量邊界值確定
初始配準后,理論與實際測量面之間的姿態誤差減小。理論上,精確配準中3個旋轉角度α1、β1、γ1的變化范圍不超過α0、β0、γ0的值,但考慮到初始配準存在誤差,精確配準變量可行域可以適當擴大,α1、β1、γ1的范圍可分別定義為:[-α0-k1,α0+k1],[-β0-k2,β0+k2],[-γ0-k3,γ0+k3],其中ki(i=1, 2, 3)為[0°,5°]之間的常數。
4 算法驗證
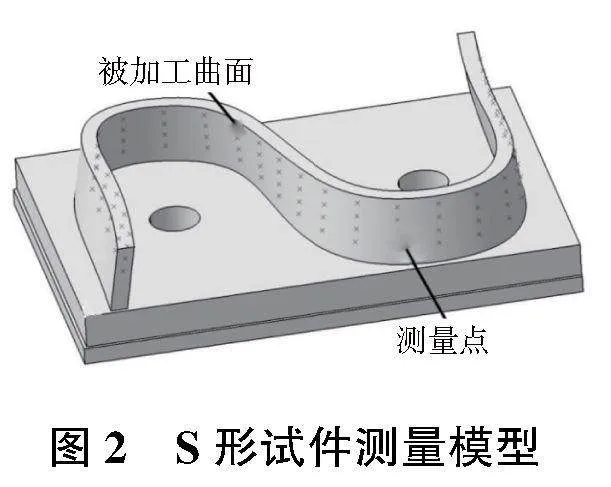
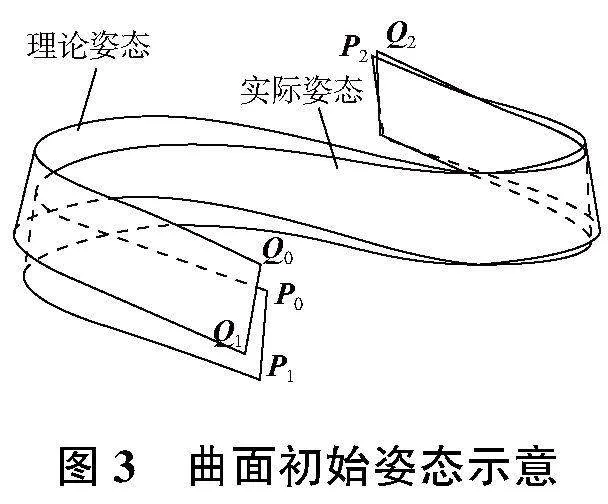
通過某S形試件對論文所提匹配算法進行驗證,測試過程按照相應的測試規范進行[19]。圖2所示為S形試件模型,加工曲面容差為ε=±0.035mm,加工曲面初始姿態如圖3所示,具體實施步驟及相關測量數據和試驗結果如下。
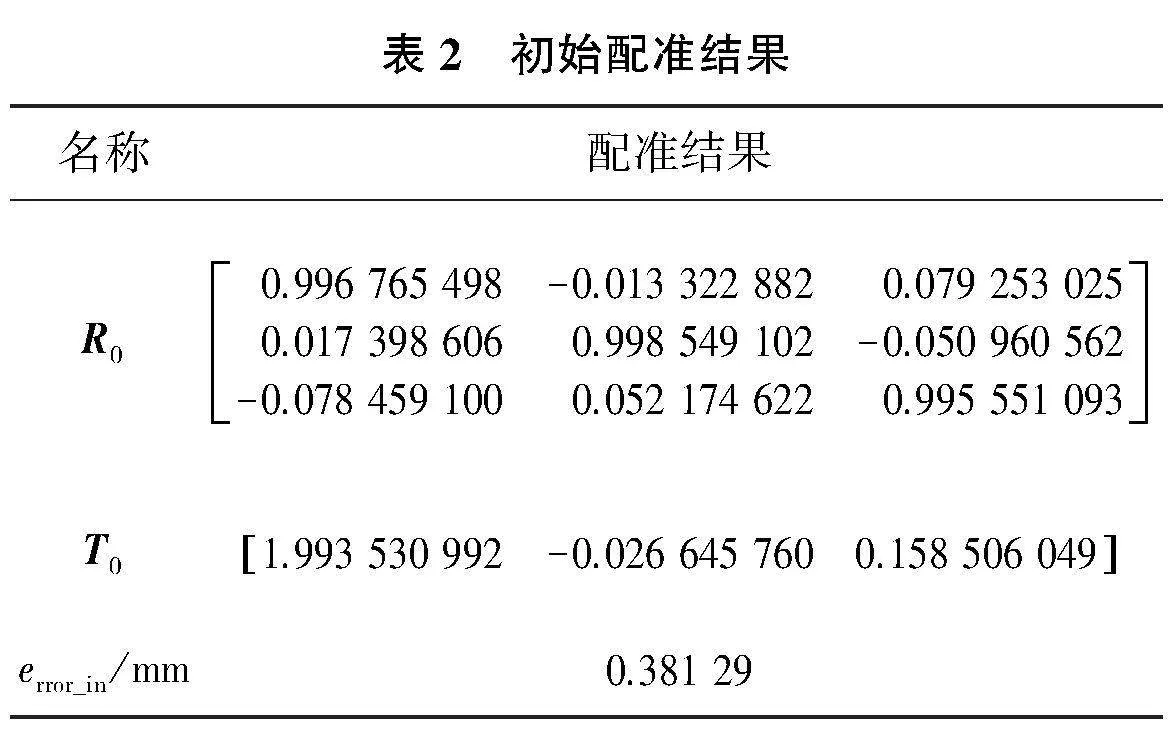
1)初始配準
從測量點集選擇相對距離最遠的3組測量點建立局部坐標系,如表1所示;根據所提算法進行初始配準,其結果如表2所示,其中error_in表示初始匹配后的輪廓誤差。
2)精確配準
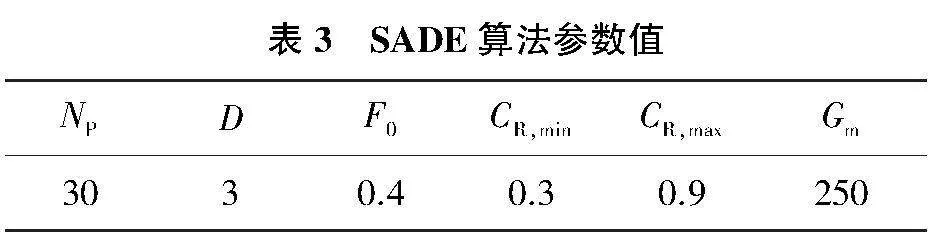
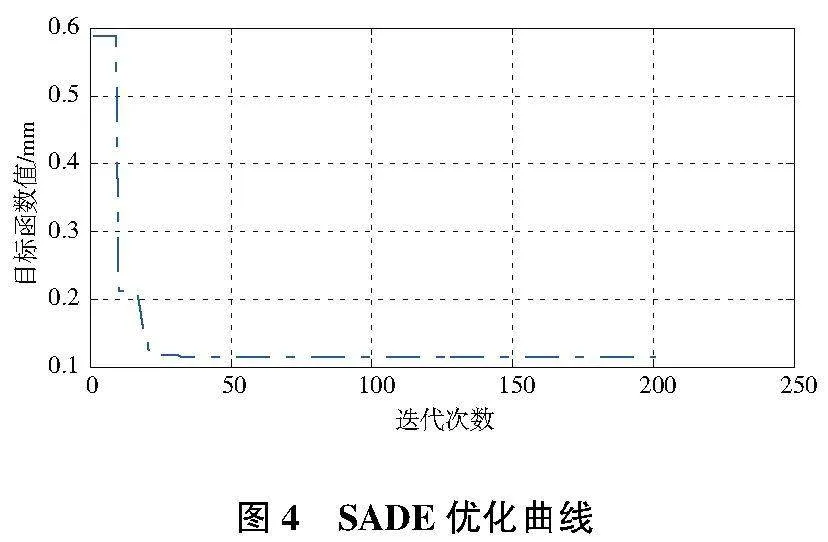
經初始配準后,邊界近似值確定為α1∈[-5°, 5°], β1∈[-5.5°, 5.5°], γ1∈[-3°, 3°]。根據SADE優化算法參數設置范圍(NP合理選擇在5D~10D之間,F的最佳初始值為0.5~0.8,則初始變異算子F0可在0.25~0.4之間選擇,Gm通常在100~500之間),最終設定的算法主要參數如表3所示。圖4所示為SADE優化曲線。由圖可知,經過200次進化獲得全局最優解(α1=-0.029 9°, β1=0.008 8°, γ1=0.002 6°, f(R1)=0.114 8mm)。計算所得精確配準矩陣R1、T1 如表4所示。調整后的平均輪廓誤差error_ad=0.028 077mmSymbol|@@ε。
3)加工坐標系調整矩陣計算
根據式(3)求得最終空間變換矩陣R和T,如表5所示。
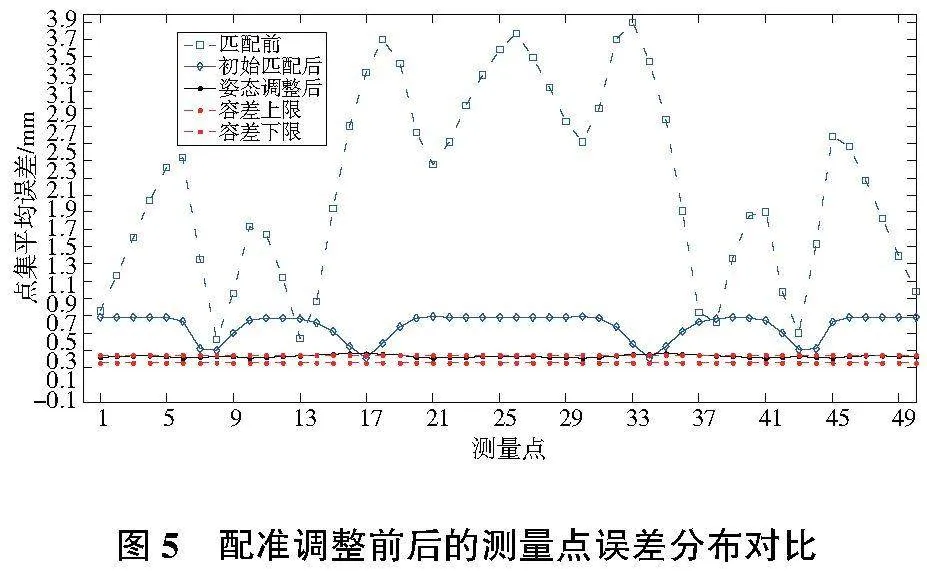
配準調整前后的測量點誤差分布對比結果如圖5所示。經過配準和工件位姿調整后,工件的輪廓誤差大幅降低,最終的超差點由50個減少為0,全部測量點的輪廓誤差均小于加工容差。
5 結語
針對工件位姿變化導致的加工輪廓誤差控制,提出了基于在機測量數據的配準算法。該算法包括初始對齊配準和精確配準。初始配準通過測量點建立的局部坐標系重合的方式實現,精確配準通過基于最小二乘距離的目標函數和SADE優化算法實現,最后通過兩次配準獲得工件加工坐標系的空間變換矩陣。本文通過算法的實例驗證,證明了其對加工輪廓誤差控制的有效性,具有較好的工程應用價值。
參考文獻:
[1] 尉淵,丁大偉,趙正彩,等. 階梯軸類零件激光在機測量誤差補償研究[J]. 機械制造與自動化,2020,49(1):23-25,51.
[2] BESL P J,MCKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1992,14(2):239-256.
[3] MAISELI B, GU Y, GAO H. Recent developments and trends in point set registration methods[J]. Journal of Visual Communication and Image Representation,2017,46:95-106.
[4] 蔡項宇,何小妹. 融合幾何特征的ICP改進算法在數字化測量評價中的應用[J]. 計測技術,2022,42(6):27-33.
[5] LIU Y H. Improving ICP with easy implementation for free-form surface matching[J]. Pattern Recognition,2004,37(2):211-226.
[6] FITZGIBBON A W .Robust registration of 2D and 3D point sets[J]. Image and Vision Computing,2003,21(13/14):1145-1153.
[7] GE X M, WUNDERLICH T. Surface-based matching of 3D point clouds with variable coordinates in source and target system[J]. ISPRS Journal of Photogrammetry and Remote Sensing,2016,111:1-12.
[8] 張文麗,程蘭,任密蜂,等.基于AGConv局部特征描述符的點云配準方法[J/OL].計算機工程:1-10[2022-02-09]. https:// doi.org/10.19678/j.issn.1000-3428.0066359.
[9] YAN S J, ZHOU Y F, PENG F Y,et al. Research on the localisation of the workpieces with large sculptured surfaces in NC machining[J]. The International Journal of Advanced Manufacturing Technology,2004,23(5):429-435.
[10] 張瑩,劉敏,張定華,等. 基于在線檢測的葉片加工余量自適應優化方法[J]. 計算機技術與發展,2014,24(11):226-229,233.
[11] 劉孝龍. 自由曲面匹配技術研究[D]. 長春:吉林大學,2015.
[12] 韓德川. 基于加權距離投票的點云匹配算法設計[J]. 現代計算機,2022,28(11):35-40.
[13] MEHRAD V, XUE D, GU P. Robust localization to align measured points on the manufactured surface with design surface for freeform surface inspection[J]. Computer-Aided Design,2014,53:90-103.
[14] 潘海鴻,莫玉良,陳家春,等. 基于四維向量的頻域匹配法實現工件位姿識別[J]. 組合機床與自動化加工技術,2022(12):120-123,127.
[15] STORN R, PRICE K. Differential evolution – a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997,11(4):341-359.
[16] 包子陽,余繼周. 智能優化算法及其MATLAB實例[M]. 北京:電子工業出版社,2016.
[17] 吳亮紅,王耀南,袁小芳,等. 自適應二次變異差分進化算法[J]. 控制與決策,2006,21(8):898-902.
[18] HUANG H X,HU P F. Self-adaptive differential evolution algorithm for the optimization design of pressure vessel[C]//2016 12th World Congress on Intelligent Control and Automation (WCICA). Guilin,China:IEEE,2016:1074-1079.
[19] ISO FDIS 10791-7 Test conditions for machining centres-part 7: accuracy of finished test piece [S].
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 17:15:21
商業會計(2016年13期)2016-10-20 15:43:05
中國科技博覽(2016年19期)2016-10-19 13:43:31
中國科技博覽(2016年19期)2016-10-19 12:09:22
中國科技博覽(2016年18期)2016-10-19 08:58:33
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
科學與財富(2016年28期)2016-10-14 20:57:11
大眾理財顧問(2016年9期)2016-10-11 17:10:17
