基于機電液聯合仿真的高空測試轉臺俯仰運動控制
2024-08-31 00:00:00丁彥蘇鄧文翔劉家輝姚建勇
機械制造與自動化 2024年3期






摘 要:針對高空測試轉臺俯仰運動存在負載不平衡以及液壓缸之間的耦合效應,通過Adams和AMESim分別構建高空測試轉臺三維俯仰轉臺的剛柔耦合動力學模型和電液控制系統模型,采用PID控制算法對測試轉臺俯仰系統技術指標要求的工況進行聯合仿真。結果表明:俯仰平臺的實際角度能很好地跟蹤角度指令,滿足定向精度要求,為后續的試驗研究奠定了理論基礎。該方法彌補了單一仿真軟件不能對系統進行完整仿真的不足,可以更加全面、準確地反映研究對象的真實控制與運動狀態,對于復雜的機電液一體化系統具有普遍的適用性。
關鍵詞:高空測試轉臺;剛柔耦合;PID控制;聯合仿真
中圖分類號:TP273文獻標志碼:A文章編號:1671-5276(2024)03-0215-04
Pitch Motion Control of High-altitude Test Turntable Based on Electro-mechanical-hydraulic Co-simulation
Abstract:Considering the load imbalance and the coupling between the hydraulic cylinders, the rigid-flexible coupling dynamics model and the electro-hydraulic control system model of the three-dimensional pitching turntable of the high-altitude test turntable were constructed by Adams and AMESim respectively. The PID control algorithm was used to co-simulate the working conditions required by the technical indicators of the test turntable pitching system. The results show that the actual angle of the pitching platform can track the angle command well and meet the requirements of orientation accuracy, which lays a theoretical foundation for subsequent experimental research. The method makes up for the deficiency that a single simulation software cannot perform a complete simulation of the system, and more accurately reflects the real control and motion state of the research object, which has universal applicability to complex electromechanical-hydraulic integrated systems.
Keywords:high-altitude test turntable; rigid-flexible coupling; PID control; co-simulation
0 引言
測試轉臺是航空航天、兵器工業等領域中進行半實物仿真、評價武器裝備性能效果的關鍵設備。作為一種高精尖試驗設備,某高空測試轉臺的主要作用是用來測試武器裝備防電磁脈沖的性能,其工作圖如圖1所示。由于武器裝備任意方向均可能受到如電磁脈沖攻擊等干擾,所以需要將其加裝到測試轉臺上,利用測試轉臺模擬復現其實際作戰時的任意方位、俯仰等姿態變化,在復雜環境下對相關裝備加以反復測試和研究,從而為相關裝備的方案設計和性能評估提供各種參考依據。
要想使測試轉臺獲得更好的跟蹤精度和實時性能,在其機械結構一定的前提下,從系統的建模和控制方面改進是行之有效的方法。與傳統的基于單仿真軟件的設計分析方法相比,多學科多軟件的聯合仿真技術可以更加真實、準確、高效地反映系統的動態特性與控制狀態,這也是目前機電液一體化領域中的研究熱點之一。
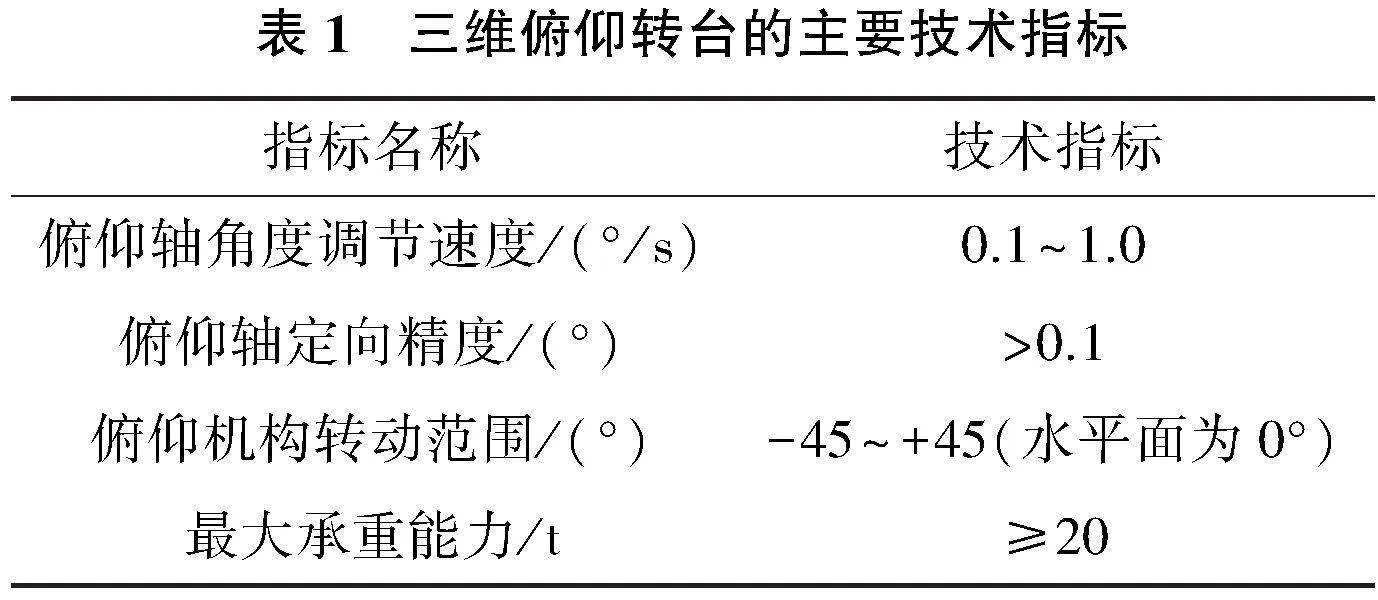
本文針對某高空測試轉臺俯仰系統,通過Adams和AMESim軟件分別對俯仰系統中的機械、液壓和控制部分進行建模,通過聯合仿真分析獲得高空測試轉臺俯仰系統的動態性能,以考察是否滿足技術指標要求。俯仰轉臺的技術指標如表1所示。
1 測試轉臺動力學模型
高空測試轉臺上的三維俯仰轉臺通過伺服閥驅動4組高精密液壓缸兩推兩拉交叉配合伸縮,輸出推力帶動俯仰平臺在-45°~+45°(規定水平面為0°)范圍內轉動。雖然轉臺只有1個自由度,但是包括了4個液壓缸,整個俯仰機構實質上是一個多輸入單輸出系統,是高度非線性的,且存在大量模型不確定性和冗余驅動約束問題[1]。想要構建其動力學方程,建立精確的數學模型是十分困難的。為此通過Adams軟件建立三維俯仰轉臺的剛柔耦合動力學模型,為之后的聯合仿真做鋪墊。
1.1 高空測試轉臺剛柔耦合總體模型
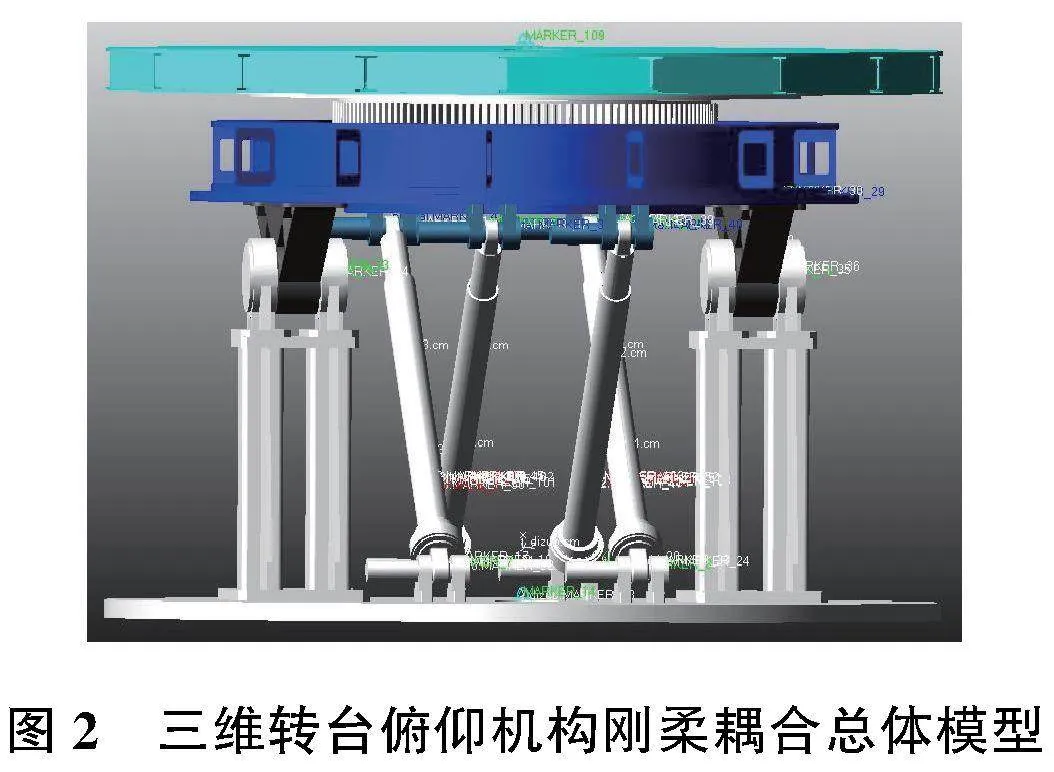
高空測試轉臺的三維轉臺俯仰系統是一個十分復雜的系統,想要建立一個包含所有部件的完整動力學模型是不現實的,所以必須做出一些適當的簡化,以建立合理的動力學模型。在建模過程中,根據其結構特點,可將俯仰轉臺分為轉臺平臺、底座、液壓缸和俯仰機構等幾部分。轉臺的機械幾何模型在SolidWorks軟件中建立并簡化好后導入Adams中,柔性部件通過ABAQUS建立后替換原剛性部件,再根據系統的運動特征添加各部件之間的運動副。所建立的高空測試轉臺三維轉臺俯仰機構剛柔耦合總體模型如圖2所示。
1.2 俯仰軸和鉸接耳軸的柔性體建模
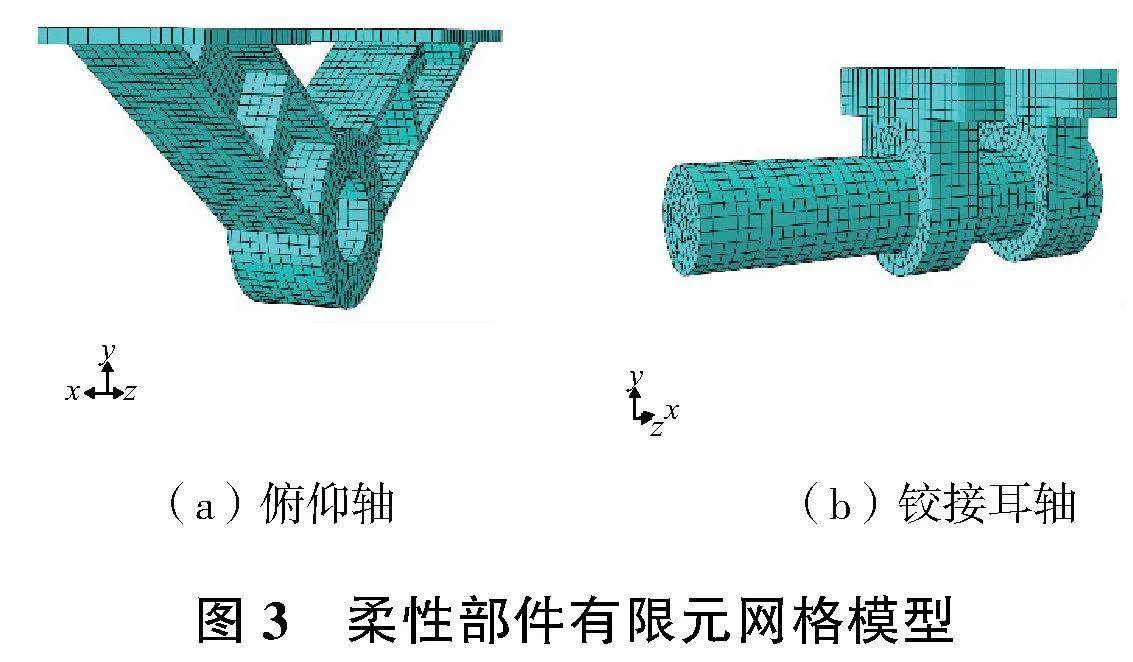
測試轉臺的俯仰運動過程中存在負載不平衡,俯仰軸存在較明顯的彈性變形。此外,多個液壓缸運動時產生的耦合效應可能會導致系統卡死。對此,將俯仰軸和鉸接耳軸柔性化。Adams軟件中柔性體建模主要包括離散化方法和引入模態中性文件方法[2]。本文借助有限元軟件ABAQUS,對俯仰軸和鉸接耳軸離散化處理,創建模態中性文件,步驟如下:1)定義材料參數;2)劃分六面體網格;3)建立與其他部件連接處的RP參考點;4)對創建的參考點施加約束和邊界條件;5)用Lanczos法提取模態進行模態分析;6)利用命令流生成.mnf 模態中性文件,在 Adams中通過Flex接口導入.mnf文件替換原剛性部件,完成柔性體模型的建立[3]。
柔性俯仰軸和鉸接耳軸的有限元網格模型如圖3所示。
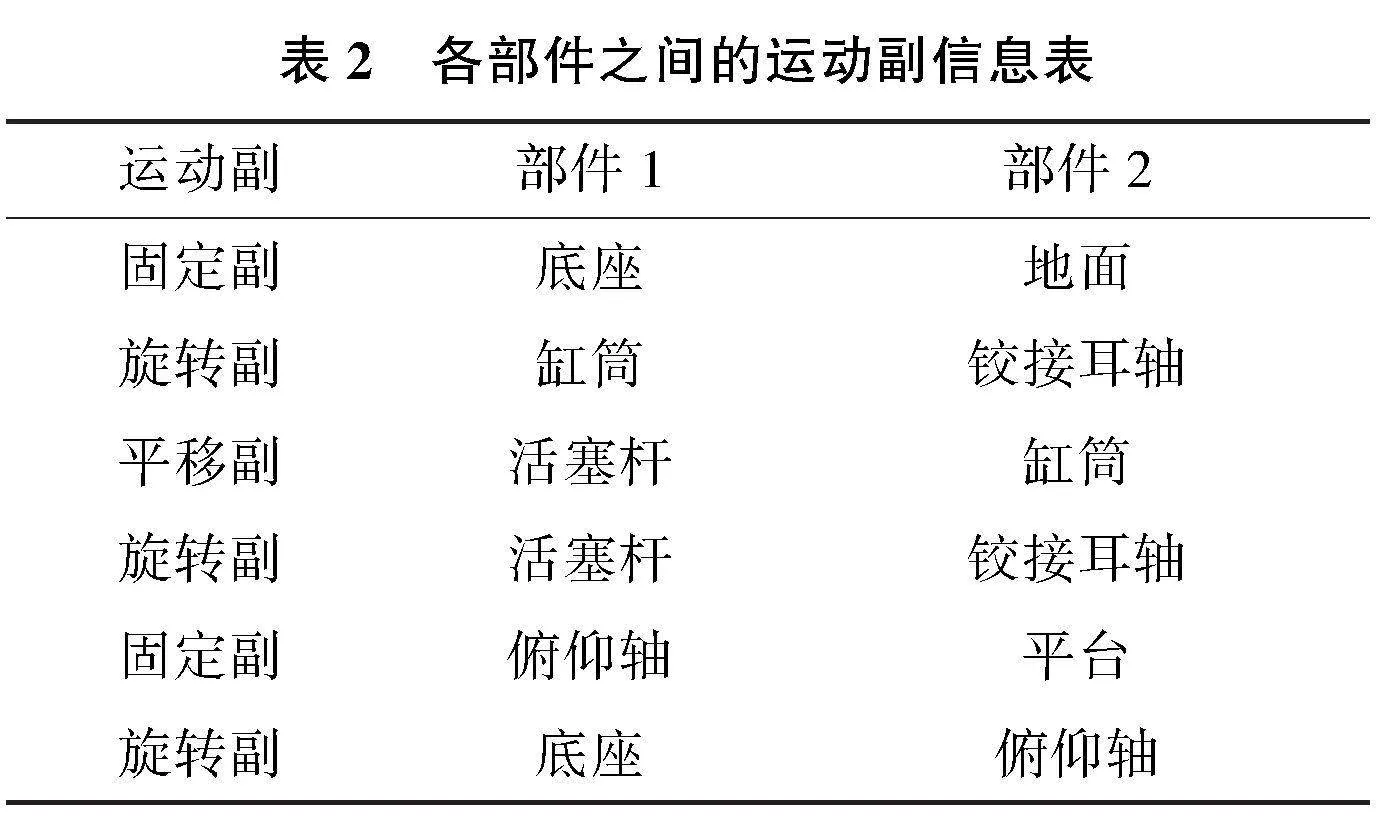
1.3 運動副的定義
在完成相關部件的柔性化后,為了建立有效的剛柔耦合動力學模型,必須在各部件之間添加合適的運動副。各部件之間運動副的定義如表2所示。
2 測試轉臺液壓控制系統模型
2.1 控制方法
在先進的工業過程控制中,經典控制理論中的PID控制無需建立精確的被控對象模型,且具有算法簡單、魯棒性好和適應性強等優點,有著最為廣泛的應用。在AMESim軟件中有PID模塊可以直接調用。綜上,本文高空測試轉臺俯仰系統中控制器采用的控制策略是PID控制。
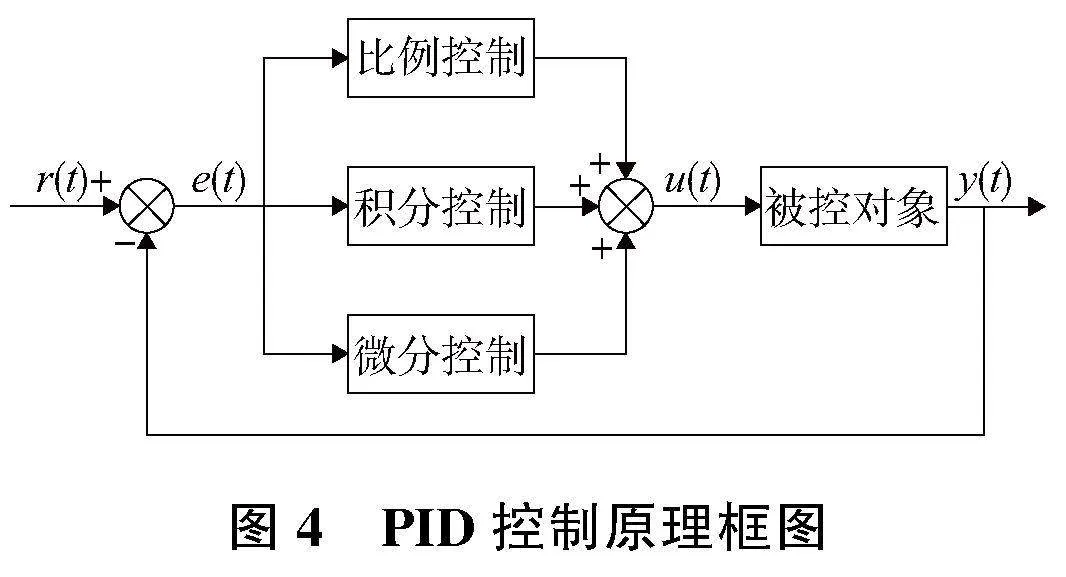
PID控制器通過比例、積分、微分的線性組合來對給定值與實際輸出值相減得到的系統偏差進行控制,是一種負反饋控制[4],其控制原理如圖4所示。
其控制算法如下:
式中:e(t)為系統偏差;Kp為比例系數;Ki為積分時間常數;Kd為微分時間常數。
2.2 液壓系統模型
俯仰液壓系統為伺服閉環控制系統,主要由伺服閥、伺服液壓缸、電磁開關閥、液控單向閥、壓力傳感器等組成。采用比例閉環控制形式,即通過對三維俯仰轉臺的狀態進行實時檢測、反饋,調整比例伺服閥的輸出,改變各支點油缸的運動速度,以達到0.1°/s~1.0°/s 的伺服驅動能力,實現較高的控制精度。在油缸的進油和出油口,還裝有液控單向閥來實現俯仰機構姿態的保持。在AMESim中建立的液壓控制系統模型即最后的聯合仿真模型,如圖5所示。
3 聯合仿真分析
3.1 聯合仿真的工作過程
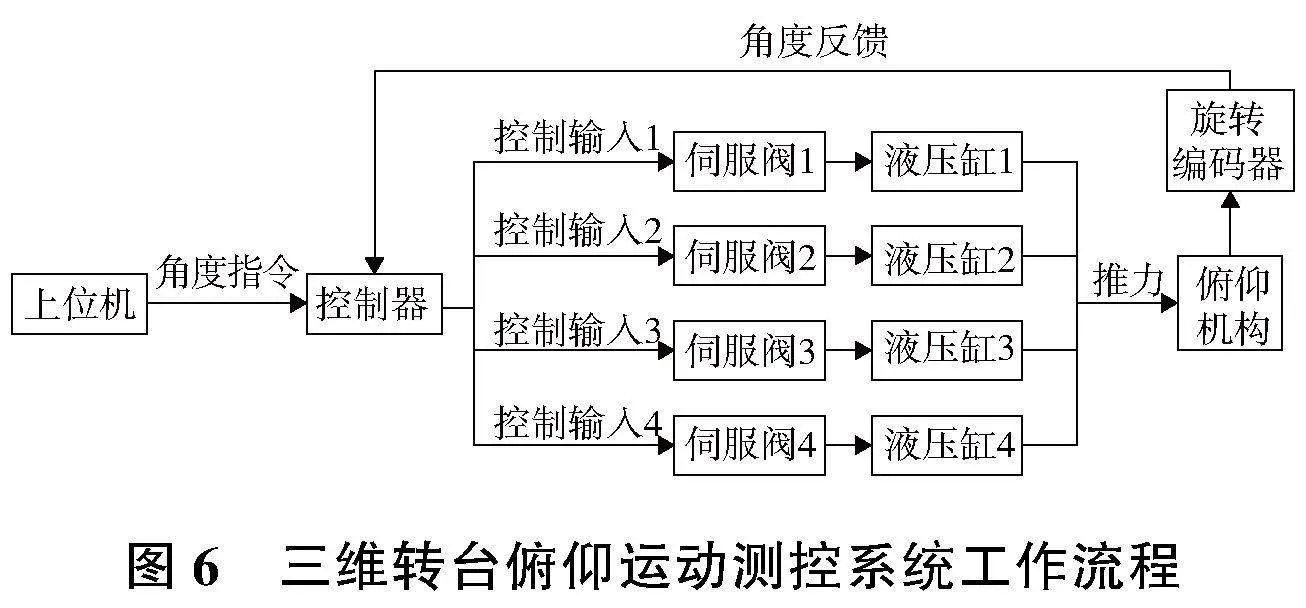
三維轉臺俯仰運動測控系統工作流程如圖6所示。聯合仿真的工作過程是Adams中的俯仰機構動力學模型接受AMESim液壓模型輸出的液壓驅動力驅動液壓缸運動,將輸出信號即缸的位移和轉臺的俯仰角度反饋給AMESim,AMESim中的控制器根據反饋得到的參數輸出信號控制AMESim中的比例伺服閥,使AMESim輸出液壓驅動力,驅動高空測試轉臺完成期望運動[5]。
3.2 聯合仿真模型的建立
以AMESim為主控軟件進行聯合仿真的核心是通過Adams和AMESim軟件之間的FMU接口模塊實現輸入變量與輸出變量數據的實時交換。在Adams/Control模塊中,如圖7所示,將4個液壓缸的驅動力定義為輸入變量,將轉臺的俯仰角度以及4個液壓缸活塞桿的位移定義為輸出變量。設置完成后,把生成的.fmu文件導入AMESim便可完成高空測試轉臺三維俯仰轉臺機電液一體化聯合仿真模型的建立(圖5)。
3.3 仿真結果及分析
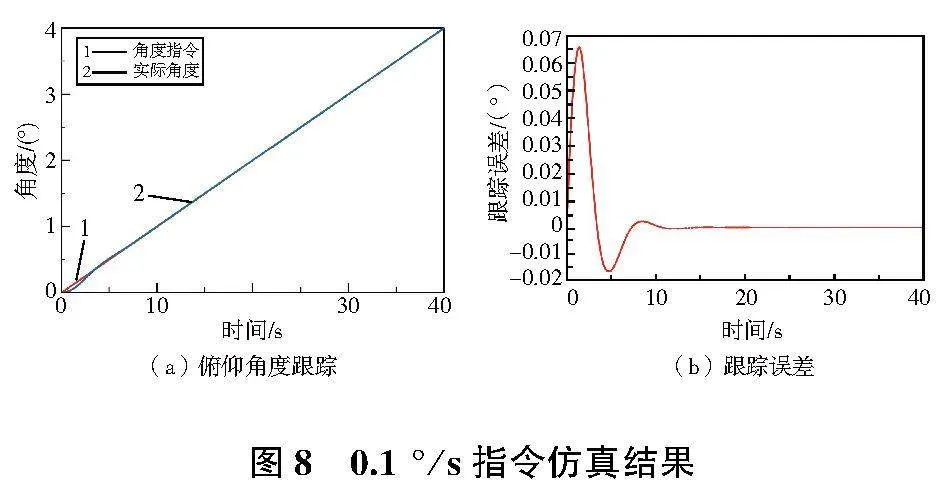
由于轉臺在俯仰運動過程中存在負載不平衡的情況,所以在Adams中設置載荷質心水平面投影偏離平臺中心0.4m,給定不同角速度下的斜坡指令跟蹤,考核在惡劣的偏載環境下、不同調速步進值下的控制精度是否滿足指標要求,即優于0.1°。分別給定0.1°/s、0.5°/s、1.0°/s的斜坡指令,仿真結果如圖8—圖10所示。
從圖8—圖10中可以看到,在偏載環境下,啟動初期由于系統大負載的慣性作用導致震蕩較大,經過PID控制器的調節后,轉臺俯仰運動可以很好地跟蹤期望信號,不同斜坡指令下的跟蹤精度均優于0.1°,滿足技術指標對于俯仰軸角度調節速度和精度的要求。
4 結語
針對高空測試轉臺俯仰系統的運動和控制需求,基于Adams和AMESim軟件進行了俯仰機構的聯合仿真分析,結果如下。
1)聯合仿真大大簡化了建立高空測試轉臺中俯仰機構動力學模型的計算量,通過交互模式在Adams中可以實時觀察到轉臺的實際運動狀態。
2)對鉸接耳軸和俯仰軸進行柔性化,建立高空測試轉臺的剛柔耦合動力學模型,可以避免俯仰運動仿真過程中因負載不平衡和多個液壓缸運動時產生的耦合效應導致系統卡死的情況出現。
3)建立了基于Adams和AMESim的高空測試轉臺三維俯仰轉臺機電液一體化聯合仿真模型,在考慮偏載的情況下,采用PID算法對轉臺俯仰系統技術指標要求的工況進行了閉環反饋控制。結果表明:俯仰平臺的實際角度能很好地跟蹤角度指令,滿足定向精度要求,為后續測試轉臺的研制、試驗和實際應用等提供了理論基礎。
4)通過多領域多軟件平臺的聯合仿真可以對高空測試轉臺的整體受控狀態進行更加全面、準確的可視化分析,機械、液壓、控制系統設計共用一個模型進行調試和試驗,大大提高了工作效率。該方法對于復雜的機電液一體化系統具有普遍的適用性。
參考文獻:
[1] 楊鋼,傅曉云,李寶仁. 兩自由度冗余驅動并聯機器人的研究[J]. 系統仿真學報,2006,18(2):416-419,423.
[2] 蔡光,吳謹,肖瀟. 基于Adams與Ansys的柔性多體系統運動特性仿真分析[J]. 制造業自動化,2014,36(23):67-70.
[3] 張玉航. 火箭炮行進間伺服發射控制技術研究[D]. 南京:南京理工大學,2020:12-13.
[4] 李資,張海麗. 基于AMESim-Matlab的伺服電機速度-壓力回路仿真研究[J]. 機械制造與自動化,2021,50(6):135-137.
[5] 王利娟,李俊霞,胡新城,等. 6-DOF擺臺多系統聯合仿真與實驗研究[J]. 艦船電子工程,2020,40(1):94-98.
