具身交互:智慧學習環境下身體在場的互動觀
2024-10-04 00:00:00楊重陽武法提
中國電化教育 2024年9期
摘要:智慧學習環境中身體意義在教學交互中的缺失,使得課堂教學變革難以從深水區突圍。身體在場成為教學變革的核心突破口。該研究首先依托現象學哲學的發展脈絡,溯源身體在場的理論基礎,解讀現象學、認知科學、交互系統設計、教育元宇宙等領域中身體在場的側重點,從中抽取出“身體在場”的具身性本質。其次,依托具身性的演化路徑,從互動觀視角重構身體在場的理論體系,即具身交互理論。該理論秉持“身體參與意義建構的體驗性交互活動”的觀點和“感知-行動-反思”的循環結構,支持身體、大腦與環境協同參與意義建構,體現出基于身體感知、感知為了行動、行動伴隨意義的特征。最后,通過歸納并融合教學交互模型與具身交互模型的雙重優勢,結合具身交互的本質內涵和循環結構,生成具身交互模型的設計原則和行動機制,構建由“被動感知交互、主動感知交互、行動交互和反思交互”組成的、以學為中心的RBAP模型,明確四要素及相互作用關系、智慧學習環境對四要素的支持作用,助力具身交互行為的識別、具身交互教學設計的開展與具身交互程度的評估,繼而突破理論的桎梏實現常態化應用。
關鍵詞:智慧學習環境;現象學;身體在場;具身交互;RBAP模型
中圖分類號:G434 文獻標識碼:A
* 本文系國家社會科學基金教育學一般課題“基于人機智能協同的精準學習干預研究”(課題編號:BCA200080)研究成果。
一、智慧學習環境下身體意義在教學交互中缺失
第四次工業革命以來,數字化浪潮的態勢顯著并縱深發展到各個領域。政府部門以教育政策為導向部署教育數字化的重大戰略目標[1],自上而下地推動教育數字化轉型。智慧學習環境的創設與升級是實施教育數字化戰略行動的首要任務,為教育全要素、全業務、全領域和全流程的數字化轉型奠定基礎。教學交互是教學活動設計的外顯形式,是連接各要素的橋梁,發生在教學主體和學習環境之間[2]。教學主體通過推理交互行為反映的意義或意圖,支持學生開展問題解決與知識建構。智慧學習環境中數字資源與智能工具等要素的迭代升級豐富了教學交互的類型,數據與模型等要素的定向應用增強了教學交互的時效性,繼而通過發揮教學交互的促進或抑制作用,轉變師生的心理狀態或行為模式[3],促進意義學習的發生。
受笛卡爾的身心二元論的影響,學習通常以心智與身體分離的觀點為指導,被視為發生在心智中的活動、脖頸以上的行為[4]。基于此,以大腦為單一學習源的“計算-表征式”認知科學和知識傳遞式教學成為一種主流的教育方式延用至今[5]。盡管智慧學習環境中的數據、資源與工具等要素提升了教學交互的效果,改善了傳統的經驗式、一體化教學的不足,推動其向數據驅動式教學方向演進。但是,教學交互仍被單純地用于助力學生大腦的信息加工和意義生成,忽略學生的身體、環境參與認知過程。這使得難以發揮身體的歷史化和社會化、環境的智能化和情境化等優勢,開展基于經驗感知、情境再現與社會交互的教學(尤其在概念抽象類、立體空間類、文言故事類知識建構,探究實踐類、工程機械類技能訓練等教學中),難以落實做中學的理念,導致學生的主觀能動性、參與的積極性均未被有效激活。譬如,在有限的45分鐘課堂中,教學交互方式仍以“教師主導發起-學生被動回復”的單一對話為主,教師對學生的關注度不夠,交互深度不足且缺乏高階認知交互。本研究旨在智慧學習環境中,通過挖掘身體的特點和意義,探索“身體-環境-大腦”協同支持認知加工、意義建構和問題解決的交互方式,改善教學交互中身體意義缺失的不足,提升學生的能動性和參與度。
二、具身性:身體在場的理論溯源
何為具身性?現象學中最經典的觀點莫過于“具身性是主體參與世界或環境的方式”[6],通過主體身體的意向性活動與獨特的表現再現世界(社會/事物),且可被觀察和描述[7]。換言之,具身性重視主體的身體參與及知覺意識,強調身體的主體性特征及身體在知覺經驗中在場的觀點[8]。這一理念顛覆了笛卡爾的身心二元論,使得身體的重要作用逐漸凸顯,身體在哲學中的地位扶搖直上。身體作為軀體,具備知覺性和運動性雙重屬性。一方面,身體的感知覺系統可基于多重感官功能系統性輸入外在信息,產生不同的心理體驗,如視覺與觸覺的共現可幫助構建完整的軀體結構。另一方面,身體的運動系統可基于現實的身體結構輸出行為動作,身體行為動作蘊含了對身體意志的表達,并賦予身體以時間性和主動性特征,如身體行為可表征主體的理解程度、語義意圖。由此,身體的知覺性和運動性屬性激活了心理體驗和身體行動[9],生成了身體在場的多元化視角。身體在場的觀念(即通過身體與世界互動)成為研究者關注的重點,并逐步拓展到認知科學、交互系統設計、教育元宇宙等各個領域。
(一)現象學:知覺經驗中身體在場
梅洛·龐蒂批判性地繼承與深化胡塞爾思想,強調身體在調節內部經驗和外部經驗的關鍵作用[10],并將“身體”在知覺中的地位提至歷史新高。一方面,賦予身體以存在論的地位與知覺意向性的底線,即身體是存在于世界的根本,人的內部知覺(視、聽、觸、嗅、動)均以身體為基礎而開展。另一方面,從知覺現象學中抽取具身性思想,凝練出“物質-環境-身體”的外部感知場,強調個體理解或體驗世界時,身體的感知過程和身體圖示的重要作用[11]。
(二)認知科學:認知過程中身體在場
第二代認知科學通過融入具身性理念,衍生出具身認知理論。該理論強調身體不再是被邊緣化的物理載體,而是作為認知主體參與了整個認知過程[12],影響著有機體的心智與思維。不同的身體構造和不同的身體參與方式會形成不同的認知[13]。現象學視域的具身認知理論關注身體知覺和身體經驗對認知的重要作用,強調通過刺激身體的感官官能體驗世界、積累經驗[14]。生成論視域的具身認知理論關注身體知覺、身體動作與外部環境的互動,強調在“感知-運動”的循環過程中生成認知[15]。鏡像神經元視域的具身認知理論強調基于鏡像機制激活觀察者感知動作與執行動作的具身模擬鏈路,實現對身體動作的觀察與模擬[16]。
(三)交互系統設計:交互功能中身體在場
Dourish首次將身體在場的具身性理論應用于人機交互的界面設計當中,強調通過模擬人與人的交互機制,建立身體行為與身體意義的關系,設計并開發人機交互功能,支持用戶通過與人工制品的行為交互來創造、操控和共享意義[17]。智能技術的迭代升級愈加凸顯身體對人機交互的調節作用[18],甚至支持身體與機器雙向交互功能的實現(包括機器對身體官能的刺激、身體對機器功能的反饋)。例如,具身智能通過綜合仿生學、軟體機器人、觸覺反饋設備等跨學科技術,設計穩健的、高魯棒性的智能體,支持開展多感官具身體驗和意義感知(如基于力反饋嵌入的具身智能大模型操控的機械臂,實現自主規劃、決策與執行刮胡子行為)。
(四)教育元宇宙:信息傳播中身體在場
教育元宇宙基于具身認知理論、分布式認知理論和沉浸理論等相關理論基礎,依托其技術組成和空間屬性,塑造出視覺沉浸、虛實交織、人機協同的立體空間場域[19],支持信息傳播時現實人和虛擬人(虛擬化身)的同域共存、同頻感知、同步交互等功能[20]。換言之,教育元宇宙強調信息傳播過程中的身體在場,通過全息技術和可穿戴設備調動現實主體的身體感知運動系統,實現虛擬化身與虛擬現實世界的交互,同時將信息傳播過程中的身體體驗反饋給現實主體,開展可見即可知、可想即可試的行動。
本研究將具身性視為身體在場且主動參與的屬性,具備情境性、主動性、意向性、體驗性與建構性等特征,可以被感受、體會和量化。本研究依托身體感知覺系統與身體運動系統的功能,將具身類別劃分為意向具身和物理具身兩類[21]。意向具身通過主體與信息(資源)的交互實現,即主體通過直接想象或他人語言表述的間接想象獲得感受和認知。物理具身則通過主體與工具的交互實現,包括直接具身(通過主體身體接觸而獲得的直觀感受)、代理具身(操控外部工具表征個體)、增強具身(借助增強反饋工具實現認知發展)。
三、具身交互:互動觀視角下具身性的演化結果
(一)具身交互起源于相關領域對具身性的研究
研究者依托現象學、認知科學、交互系統設計、教育元宇宙等具身性應用和社會學的互動理論,凝練出具身交互的概念,并將其解讀為“身體知覺和身體經驗的轉化應用活動、身體參與意義建構的交互活動、基于身體行為與意義的關系開展交互設計分析的方法、基于智能技術延展身體知覺所帶來的沉浸式體驗活動”等觀點。具身交互作為一種身體參與意義建構的交互活動的觀點被廣泛應用于教育心理學等領域。例如,Abrahamson將具身交互視為一種技術支持和身體參與的訓練活動,旨在依托具身認知理論開展感知設計與動作設計[22],建立主體的心理空間與身體動作的映射聯結關系[23]。王辭曉將具身交互視為身體在場的交互,強調主體運用身體的習得性技能在物理世界中開展交互,并將感知意向內化到心理空間[24]。葉浩生通過系統梳理主體與外部環境的宏觀交互、身體外顯動作的中觀交互和身體感官官能的微觀交互[25],初步明確具身交互行為、深化身體參與意義建構的過程。
(二)具身交互發展于具身認知的理論基底
具身認知理論動搖了第一代認知科學中“計算-表征”、身心分離的核心思想,主張認知不應被視為孤立的信息加工,而是嵌入身體和環境的活動[26],是在大腦、身體和環境的交互過程中生成的[27]。Abrahamson在生成論視域下的具身認知理論中融入身體在場的觀點,提煉出基于直覺經驗認知系統和結構推理認知系統生成的“感知-行動”循環過程[28]。直覺經驗認知系統是感知的基礎,結構推理認知系統是行動后獲得新經驗的存儲場所。感知為了行動產出,行動深化感知體驗。教學過程中學生的認知加工有賴于教師圍繞特定的教學目標,有目的、有計劃地引導,助力學生的大腦、身體、環境與認知對象發生有效互動[29]。換言之,教學過程同樣注重通過情境支持的反思性實踐實現有效交互,達成“學習中行動→行動中反思→反思中實踐→實踐中建構”的螺旋式具身學習流程[30]。基于此,研究者從具身認知的“感知-行動”中抽取出反思要素,構建由“感知-行動-反思”組成的具身認知的循環結構。
本研究秉持具身認知的“感知-行動-反思”循環結構、精煉“身體參與意義建構的交互活動”觀點,將具身交互界定為身體在場的(包括身體知覺、身體經驗、身體動作和身體意義在場),身體、大腦與環境協同參與意義建構的體驗性交互活動,體現出基于身體感知、感知為了行動、行動伴隨意義等特征。其中,身體知覺和身體經驗在場關注身體感知覺系統對信息的感知體驗和內化加工,身體動作在場關注身體運動系統與環境、人工制品交互時的聯結映射與意義建構,身體意義在場關注信息傳播中身體行動蘊含的意圖和輸出的反饋。
作為“身體在場的體驗性交互”和“身體、大腦與環境協同參與的建構性交互”,具身交互既包括內隱層面的感知、想象等心理活動,又包括外顯層面的身體姿態、手勢動作、話語語調等身體動作。二者旨在基于感知體驗和行為映射對問題解決產生原發性引導,促進意義建構。換言之,具身交互活動特指解決問題的活動,而非全部的心理活動和身體動作,通常基于主體與環境(工具/資源)的直接或間接交互進行表征。具身交互活動中,主體的身體結構與獲取到的習得性技能,將進一步參與自身或他人新知識技能的生成,促使主體與環境在自發的交互過程中得以雙向建構[31]。因此,除了繼承具身性的主動性、體驗性與建構性等特征外,具身交互還具備社會性與自組織等特征。這使得具身交互成為支持個體交互和社會交互共存的融合性交互活動。于個體交互,具身交互通過激活主體的知覺經驗,助力身體、大腦和環境協同參與信息加工過程,消解知識的抽象程度,降低主體的認知負荷、加深臨場感。于社會交互,具身交互通過加強主體間的社會參與程度開展群體知識建構,達成高階認知。
(三)具身交互深化于互動模型的應用
互動模型作為連接具身交互的抽象概念與實踐應用的橋梁,往往通過明晰互動主體、互動內容或互動階段,指導多場景應用。教學互動模型關注師生間的互動及其對學習的促進作用,發生在教學主體與學習環境的相互交流、相互作用之中。研究者通常基于身體缺失與身體在場的特征,將其劃分為教學交互模型和具身交互模型兩類。例如,陳麗依托行為主義與建構主義理論,構建了網絡學習環境下的教學交互層次塔模型,實現了從具體到抽象、從外顯到內隱、從低級到高級的逐層遞進[32]。該模型中的人機交互與人際交互的優勢大幅度提升了學生的社會參與程度。然其主體身體缺失的特點,使得學生單純依靠大腦的信息加工產生基于鼠標、鍵盤的輸入行動,難以調動其他身體結構主動參與交互,身體在場的程度較低。胡翰林通過構建具象化的具身交互過程模型,將其抽象概念轉變為具體階段,包括身體感知、具身模擬與思維外顯三階段[33],即主體基于對實體、氛圍的感知自主探索,刺激鏡像神經元系統模仿學習,通過身體動作將大腦的理解與思考過程外顯于形。黃洪濤等通過依次建立科學概念及空間環境的聯結、外部行為與內部心理的映射等交互內容與交互步驟,構建了促進概念理解的具身交互過程模型[34],支持對學生的具身交互行為、科學概念的意義建構質量進行評估。Jackson以梅洛·龐蒂的身體介入環境開展互動的觀點為指導,構建了教練式學習場景的具身交互模型[35],包括反思性具身(源于對他人外顯行為的反饋,強調學習主體通過觀察和模仿開展的交互)、反移情具身(源于他人表現出來的感受,強調教練的共情反應)、參與具身狀態(源于放大自己的感受經驗,強調學習主體關注自身的感知體驗)、定制性具身(源于共享他人的感受體驗,強調學習主體參與到他人經驗當中共享體驗)。上述三種具身交互模型中身體在場的共性特征,可全方位調動學生個體的身體、大腦與環境的協同交互,但卻忽略了學生群體的社會交互行為,學生的社會參與程度較低。
綜上所述,受笛卡爾身心二元論的影響,教學交互模型中身體對教學的促進作用被忽略,大腦(心智)在學習中主體地位的思想根深蒂固,其應用呈現出社會參與程度較高、身體參與程度不足等特征。具身交互模型秉持以學為中心的理念和身體參與交互活動的特征,支持學生個體的身體、大腦與環境協同參與,提升教學臨場感。然而一方面,由于學生身體地位的提高和相關活動資源的不足,使其應用大多在實驗室環境下以學生個體為單位開展,學生群體的社會交互活動較少。另一方面,由于教學實踐者對具身交互模型的理解不足或設計不當,使其應用存在分散學生注意力、耗費學生心理資源、增強學生認知負荷的可能。智慧學習環境中數據、模型、資源、工具、服務和場景等要素功能[36],豐富了具身交互內容、拓展了具身交互形式,支持身體在場的個體交互與社會交互共存。因此,本研究通過融合教學交互模型中社會參與度高與具身交互模型中身體在場等優勢,構建智慧學習環境下以學為中心的具身交互模型,支持將具身交互的抽象理論轉化為具象應用。
四、智慧學習環境下的具身交互模型:具身交互理論到實踐的橋梁
(一)具身交互模型的設計理念
1.融合教學交互模型與具身交互模型的優勢
具身交互模型的設計需綜合考慮教學交互模型的系統性、群體性、反思性和具身交互模型的主動性、個體性、體驗性等交互優勢,同時發揮智慧學習環境要素的功能作用,支持學生身體參與個體與群體的交互過程,助力高人際交互、高人機交互和高意義建構目標的達成。
2.關注主體的心理參與、身體參與和社會參與狀態
教學主體的心理狀態與身體動作的相互激活是具身交互活動需達成的內在成效,也是激活其內部動機、調節行為參與意愿與質量的重要因素。社會交互側面反映出主體的主動程度、交互廣度與投入深度。因此,主體的心理參與、身體參與和社會參與成為模型設計的關注點。
3.協調兩個認知系統的參與和轉化,建立行動與概念的映射關系
模型設計需調動直覺經驗認知系統和結構推理認知系統的參與,實現外化于行、內化于智的建構行動。同時,在“感知-行動-反思”循環結構中建立抽象概念與簡單概念、抽象概念與具體事物、抽象概念與身體動作等映射關系,實現對抽象概念的深度理解與正向遷移。
(二)具身交互模型的行動機制
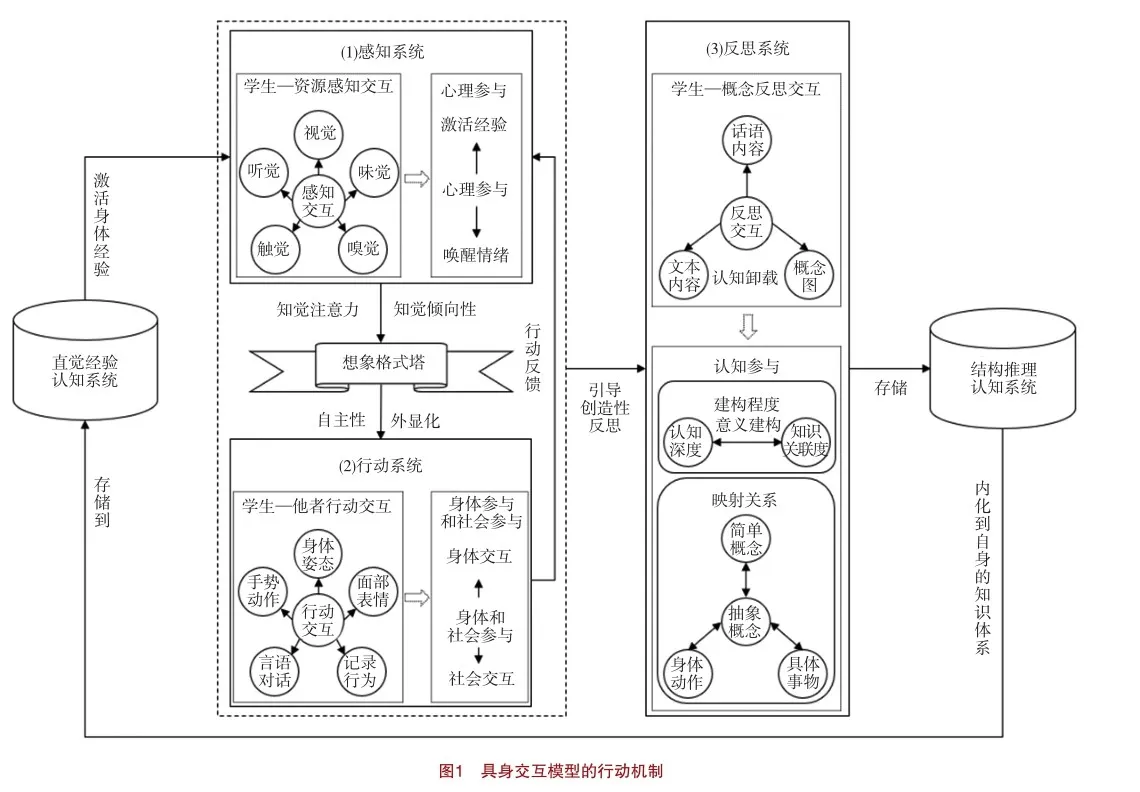
本研究依托具身交互的“身體在場”特征、“體驗性和建構性交互”內涵和“感知-行動-反思”的循環結構,結合具身交互模型的設計理念,構建由直覺經驗認知系統、結構推理認知系統、感知系統、行動系統、反思系統等要素組成的具身交互模型的行動機制,如下頁圖1所示。五大要素相互關聯、互為支撐,共同支持具身交互行動的發生與具身交互模型的構建。
1.構成要素
(1)直覺經驗認知系統:具身交互的經驗來源
該系統容納了學生的先前經驗與已習得的經驗,經驗類型包括身體知覺經驗、抽象知識與具體事物的映射關系經驗、抽象知識與身體動作的映射關系經驗、結構化知識體系等。
(2)結構性推理認知系統:意義建構的存儲場所
該系統承載了經過深思熟慮的加工與推理后的知識內容,通過多輪循環迭代將其內化到知識體系當中,是具身交互中意義建構結果和新映射關系經驗的存儲場所。
(3)感知系統:支持學生與資源的感知交互
該系統是感知信息的載體,依托身體的感知覺系統,實現學生與資源直接或間接的感知交互。感知系統是具身交互的基礎,為行動系統與反思系統提供原始動力。
(4)行動系統:支持學生與他者的行動交互
該系統是運用信息的載體,依托學生語言系統與身體運動系統,支持學生與工具、學生與教師、學生與學生的行動交互。行動系統是感知系統外顯表達的渠道,感知系統與行動系統的循環迭代過程為反思系統提供條件支撐。
(5)反思系統:支持學生與概念的反思交互
該系統是內化信息的載體,通過引導學生開展認知卸載行為,支持學生與概念的反思交互,實現對行動結果的反饋輸出。反思系統為感知系統與行動系統循環結果提供反饋支持。
2.行動機制
具身交互模型的行動機制如下:首先,外部信號刺激學生感知覺系統的視、聽、觸、味、嗅等多重感官通道,調動身體的直覺經驗認知系統,激活學生的心理參與狀態(如激活經驗、喚醒情緒),實現學生與資源直接或間接的感知交互。學生往往基于自身的知覺注意力及經驗選擇傾向性自主構建注意力錨,將感知到的信息主動外顯化至行動系統,指導行動的產生。
其次,學生與他者(學生與工具、學生與教師、學生與學生) 通過主動開展言語對話、身體姿態、面部表情、手勢動作等語言與非語言的行動交互,將感知到的信息作用于行動系統,實現從基于身體經驗的感知到基于身體動作的轉化,同時調動學生的身體參與狀態和社會參與狀態。行動交互的反饋結果將作用于學生的感知系統,進一步深化感知交互,實現感知系統與行動系統的循環交互,直至生成穩定的認知結果。
再次,引導學生開展文本撰寫、概念圖繪制、評價反饋等認知卸載行為,支持學生共享自身經驗或反思他人的反饋結果,實現學生與概念的反思交互。反思交互結果不僅能反映學生的意義建構程度,而且能加深學生建立的抽象概念與簡單概念、抽象概念與身體動作、抽象概念與具體事物等的映射關系,提升學生的認知參與水平與意義建構程度。
最后,“感知-行動-反思”的循環結構,促使學生主動將已習得的建構結果和映射關系存儲到結構推理認知系統中,繼而將其內化到自身的知識體系當中。經多輪活動,學生可自主選擇將習得的結構化知識轉化為新的直覺經驗,并存儲到直覺經驗認知系統當中,形成直覺經驗與結構知識雙向建構的閉環體系。
(三)智慧學習環境下的具身交互模型
本研究依托具身交互中“身體在場的體驗性交互和身體、大腦、環境協同參與的建構性交互”的本質內涵、具身交互模型的設計理念和“經驗認知-感知-行動-反思-推理認知”的行動機制,融合智慧學習環境中數據、模型、資源、工具與服務等要素功能,構建智慧學習環境下以學為中心的具身交互模型(簡稱RBAP模型),如下頁圖2所示。RBAP模型主要包括交互主體、交互內容、交互層級與環境支持4類信息。
1.交互主體與交互內容
RBAP模型的交互主體為教學主體與智慧學習環境各要素。交互內容包括被動感知交互(Passive Perceptual Interaction)、主動感知交互(Acquired Perceptual Interaction)、行動交互(Behavioral Interaction)與反思交互(Reflective Interaction),分別對應學生與資源的直接或間接交互、學生與他者(工具/主體)的交互、學生與概念的交互。
被動感知交互屬于意向具身,發生在個體學習環境中。學生通過被動感知教師的輸出信息,激活身體的知覺經驗和情緒體驗,實現學生與資源的單向交互。一方面,學生通過觀看教師演示工具、展示資源、撰寫板書等動作行為,激活學生的知覺經驗和情緒體驗。另一方面,學生通過傾聽教師講授、師生對話等言語行為,激活學生的映射關系經驗。
主動感知交互屬于意向具身,發生在個體學習環境中。學生通過自主操控主動感知信息,喚醒學生的知覺經驗和情緒體驗,實現學生與資源的直接或間接交互。一方面,學生基于教師的指令性言語轉換教與學的方式,通過眼部注視觀察與點擊瀏覽資源,實現學生與資源的直接交互。另一方面,學生自發產生的語言與非語言行動會得到來自教師、同伴、工具的反饋,如教師或同伴的采納觀點、口頭表揚、行動指示,工具對行為正誤的反饋等信息。學生通過主動感知上述反饋信息,指導xr4OFQlFDCA+DMCuD73QqA==下一步行動的開展,實現學生與資源的間接交互。
行動交互屬于物理具身,發生在個體學習環境和群體學習環境中。學生基于外顯工具支架開展基于身體動作的探究、討論等行為,實現學生與工具的人機交互、學生與主體的人際交互。一方面,基于主體的身體結構和身體動作開展觸摸、聞嗅、擺放、涂抹、姿態等人機交互行為,調動學生的身體參與、延伸身體體驗并建立新的映射關系。另一方面,基于師生問答互動、生生的討論協商等人際交互行為,調動學生的社會參與、喚醒情緒體驗。
反思交互發生在個體學習環境和群體學習環境中。基于教師引導或工具提示,支持學生反思自身經驗或他人反饋結果,實現學生與概念交互。一方面,教師引導學生開展評價反饋,評價學習要點、整合學習觀點、反思學習效果。另一方面,教師通過發布并展示學習任務單中實驗設計、概念圖繪制等任務結果,掌握學生的認知卸載與知識遷移程度。
2.交互層級與環境支持
具身交互程度通常按照身體參與由低到高的順序被劃分為觀察、操控、感知、化身四類。王辭曉等依托上述具身交互程度的劃分標準,將虛擬學習環境的具身交互行為按其程度高低劃分為:替代交互<控件交互<涉身交互<全身交互[37]。替代交互是指學生通過觀察視頻資源支持身體參與,開展基于觀察的單向交互,對應RBAP模型中被動感知交互。控件交互是指學生通過鍵盤與鼠標等工具支持身體參與,開展基于操控的主動交互,對應主動感知交互。涉身交互是指學生通過手持設備、觸控設備或交互手柄等手勢識別設備,調動身體的肢體動作參與,開展基于小幅度身體動作的觸控交互,對應行動交互。全身交互是指學生通過可穿戴設備,調動身體姿態參與,開展基于大幅度身體動作的沉浸/化身交互,對應行動交互。值得注意的是,具身交互不僅是身體在場的體驗性交互活動,而且是身體、大腦、環境協同參與的建構性交互活動。這意味著身體參與的范圍與動作幅度的大小并非是判斷具身交互程度的唯一決定性因素。本研究將身體-大腦-環境的協同調動程度作為判斷高具身交互程度的標準之一。RBAP模型中反思交互旨在智慧學習環境的要素支持下,引導學生開展對感知-行動結果的反思,該活動調動了大腦、身體與環境的協同參與,被視為最高具身程度的交互。本研究按由低到高的順序將具身交互層級劃分為Passive 智慧學習環境往往依托資源與工具要素調動身體在場的程度,支持具身交互內容及其功能實現。本研究依托上述具身交互層級的分類標準,將智慧學習環境劃分為單向式學習環境、點擊式學習環境、觸控式學習環境和沉浸式學習環境四類,分別支持RBAP模型中不同的具身交互內容。(1)單向式學習環境中,網絡技術、智慧黑板等演示類工具和數字資源的配置,為學生提供低具身程度的交互,激活學生的身體知覺經驗在場,支持被動感知交互、行動交互中人際交互、反思交互等活動。(2)點擊式學習環境中,網絡與交互式技術、電腦鍵鼠套裝、學科工具等增強型工具和數字資源的配置,為學生提供較低具身程度的交互,激活學生的身體知覺經驗在場,支持被動感知交互、主動感知交互、行動交互中人機單向交互與人際交互、反思交互等活動。(3)觸控式學習環境中,觸控技術或手勢識別技術、平板或交互式手柄等調整型工具與交互式資源的配置,為學生提供中等具身程度的交互,激活學生的身體知覺經驗、小幅度身體動作(如手勢動作)和身體意義在場,支持被動感知交互、主動感知交互、行動交互中人機雙向觸控交互與人際交互、反思交互等活動。(4)沉浸式學習環境中,VR/ AR/MR等可穿戴設備或增強現實展臺等重構型工具和虛擬現實、增強現實等體驗式資源的配置,為學生提供高具身程度的交互,激活身體知覺經驗、大幅度身體動作和身體意義在場,支持被動感知交互、主動感知交互、行動交互中人機雙向沉浸交互與人際交互、反思交互等活動。 智慧學習環境下RBAP模型突破了笛卡爾身心二元論的限制,既可基于“身體在場”和“身體-大腦-環境協同參與”的本質特征和智慧學習環境的要素功能,支持學生個體開展體驗性交互和建構性交互活動,又能支持學生與其他主體以共在的狀態和社會實踐的方式開展人機與人際等社會性交互活動,擺脫現象學中唯我論的困境,達成認知的客觀性和普遍共享的實在性理念[38]。然而,如何基于智慧學習環境下RBAP模型指導具身交互活動資源的設計、具身交互教學的應用、具身交互程度的診斷和效果檢驗,均是未來研究亟待研究的話題。 參考文獻: [1] 懷進鵬.深入貫徹黨的二十大精神, 縱深推進教育數字化戰略行動[N].中國教育報,2022-10-25(11). [2] 陳麗.遠程教學中交互規律的研究現狀述評[J].中國遠程教育,2004,(1): 13-20+78. [3] 韓琴,周宗奎,胡衛平.課堂互動的影響因素及教學啟示[J].教育理論與實踐,2008,(16):42-45. [4] 張良.論具身認知理論的課程與教學意蘊[J].全球教育展望,2013,42(4): 27-32+67. [5] 李棟.從缺席到主場:身體的境況與課程知識教學[J].中國電化教育,2023,(4):16-22+31. [6] Dreyfus H L.The current relevance of Merleau-Ponty’s phenomenology of embodiment [J].The electronic journal of analytic philosophy,1996,4(4):1-16. [7] Alban M W,Kelley C M.Embodiment meets metamemory:weight as a cue for metacognitive judgments [J].Journal of Experimental Psychology:Learning, Memory,and Cognition,2013,39(5):1628. [8] [丹]丹·扎哈維著.李忠偉譯.胡塞爾現象學[M].北京:商務印書館,2022. 131-135. [9] 華鴻燕.隱喻性話語取象的具身認知研究[D].重慶:西南大學,2019. [10] [法]莫里斯·梅洛-龐蒂.姜志輝譯.知覺現象學[M].北京:商務印書館,2001.116-130. [11] Mooney T.Phenomenology of perception [J].International Journal of Philosophical Studies,2012,20(4)tRoBLTzHL/yosKVjMWOCSQ==:589-594. [12] Beavers,A.F.The Phenomenological Mind:An Introduction to Philosophy of Mind and Cognitive Science [J].Philosophical Psychology,2009,22(4):533-537. [13] 趙瑞斌,張燕玲等.智能技術支持下具身學習的特征、形態及應用[J].現代遠程教育研究,2021,33(6):55-63+83. [14] 唐佩佩,葉浩生.作為主體的身體:從無身認知到具身認知[J].心理研究,2012,5(3):3-8. [15] [智]F.瓦雷拉,[加]E.湯普森,[美]E.羅施.李恒威,李恒熙等譯.具身心智:認知科學和人類經驗[M].杭州:浙江大學出版.2010.139-142. [16] 王辭曉.具身認知的理論落地:技術支持下的情境交互[J].電化教育研究,2018,39(7):20-26. [17] Dourish P.Where the action is:The Foundations of Embodied Interaction [M]. London:MIT press,2001.100-126. [18] Shah H,Warwick K,Vallverdú J,et al.Can machines talk Comparison of Eliza with modern dialogue systems [J].Computers in Human Behavior,2016,58:278-295. [19] 劉革平,高楠等.教育元宇宙:特征、機理及應用場景[J].開放教育研究,2022,28(1):24-33. [20] 沈湘平.我身何是 我知何識 我心何屬 —中國人學研究需直面當代三問[J].江海學刊,2022,(1):64-72. [21] Black J.An Embodied/Grounded Cognition Perspective on Educational Technology [J].New Science of Learning, 2010,3:45-52. [22] Abrahamson D,Trninic D.Bringing forth mathematical concepts: Signifying sensorimotor enactment in fields of promoted action [J].ZDMMathematics Education,2015,47:295-306. [23] Abrahamson D,Abdu R.Towards an ecological-dynamics design framework for embodied-interaction conceptual learning:The case of dynamic mathematics environments [J].Educational Technology Research and Development,2021,69:1889-1923. [24] 王辭曉.具身設計:在感知運動循環動態平衡中發展思維——訪美國具身認知領域著名專家多爾·亞伯拉罕森教授[J].現代遠程教育研究,2019,(2):3-10. [25] 葉浩生.認知與身體:理論心理學的視角[J].心理學報,2013,45(4):481-488. [26] Gallese V.Before and below ‘theory of mind’: embodied simulation and the neural correlates of social cognition [J].Philosophical Transactions of the Royal Society B: Biological Sciences,2007,362(1480):659-669. [27] 馮永剛,呂鑫源.智能教育背景下學生身體的退隱與回歸[J].中國電化教育,2023,(9):34-40+49. [28] [美]R.keith Sawyer.徐曉東,楊剛等譯.劍橋學習科學手冊(第二版)[M].北京:教育科學出版社.2021.373-387. [29] 范文翔,趙瑞斌.具身認知的知識觀、學習觀與教學觀[J].電化教育研究,2020,41(7):21-27+34. [30] 鄭旭東,王美倩等.論具身學習及其設計:基于具身認知的視角[J].電化教育研究,2019,40(1):25-32. [31] 鐘柏昌,劉曉凡.論具身學習環境:本質、構成與交互設計[J].開放教育研究,2022,28(5):56-67. [32] 陳麗.遠程學習的教學交互模型和教學交互層次塔[J].中國遠程教育,2004,(5):24-28+78. [33] 胡翰林,沈書生.生成認知促進高階思維的形成—從概念的發展談起[J].電化教育研究,2021,42(6):27-33. [34] 黃紅濤,孟紅娟等.混合現實環境中具身交互如何促進科學概念理解[J].現代遠程教育研究,2018,(6):28-36. [35] Jackson P.Theorising embodied interaction in coaching:A Merleau-Pontian perspective on embodied practice [J].Theory & Psychology,2023,33(1):78-98. [36] 武法提,楊重陽等.智慧學習環境中的人機協同設計[J].電化教育研究,2024,45(2):84-90. [37] 王辭曉,李睿玉等.虛擬實驗具身程度及其對學習成效的影響[J].開放教育研究,2022,28(5):93-104. [38] [德]胡塞爾著.張廷國譯.笛卡爾式的沉思[M].北京:中國城市出版社,2001.4-162. 作者簡介: 楊重陽:講師,博士,研究方向為智慧學習環境設計、具身交互教學設計理論。 武法提:教授,博士生導師,研究方向為智能學習系統與智慧學習環境設計。 Embodied Interaction: The Theory of Interaction in Body Presence Based on Smart Learning Environment Yang Chongyang1,3, Wu Fati2,3 1.School of Educational, Hebei Normal University, Shijiazhuang 050024, Hebei 2.School of Educational Technology, Beijing Normal University, Beijing 100875 3.Engineering Research Center of Digital Learning and Educational Public Service, Ministry of Education, Beijing Normal University, Beijing 100875 Abstract: In smart learning environment, the meaning of body is missing in teaching interaction, which poses a significant challenge to teaching reform. The presence of the body has become a core breakthrough in teaching reform. Based on the development of phenomenological philosophy, this study first traces the theoretical system of body presence, interprets the focus of body presence in phenomenology, cognitive science, interactive system design, and educational metaverse. And then, we extract the embodied essence of “body presence” from it. Secondly, this study relies on the evolutionary path of embodiment, the theoretical system of body presence is reconstructed from the perspective of interaction, namely embodied interaction theory. This theory holds the view of “the body participates in meaning construction”and the dynamic mechanism of the cycle of “perception-behavior-reflection”. It supports the collaborative participation of the body, brain, and environment in meaning construction, and shows the characteristics of “perception based on the body, perception for behavior, and behavior comes with meaning”. Finally, by integrating the advantages of teaching interaction model and embodied interaction model, combining the essential and dynamic mechanism of embodied interaction, the design principles and action mechanism of embodied interaction are generated, and the RBAP model consisting of “passive perceptual interaction, acquired perceptual interaction, behavioral interaction, and reflective interaction” is constructed. The content and interaction relationship of the four elements are clarified, and the supporting of smart learning environment for embodied interaction are summarized, to facilitate the identification of embodied interaction behavior, the development of embodied interaction instructional design, and the evaluation of the effects of embodied interaction. Thereby breaking through the theoretical barriers to achieve normalized application. Keywords: smart learning environment; phenomenology; body presence; embodied interaction; RBAP model 收稿日期:2023年10月16日 責任編輯:趙云建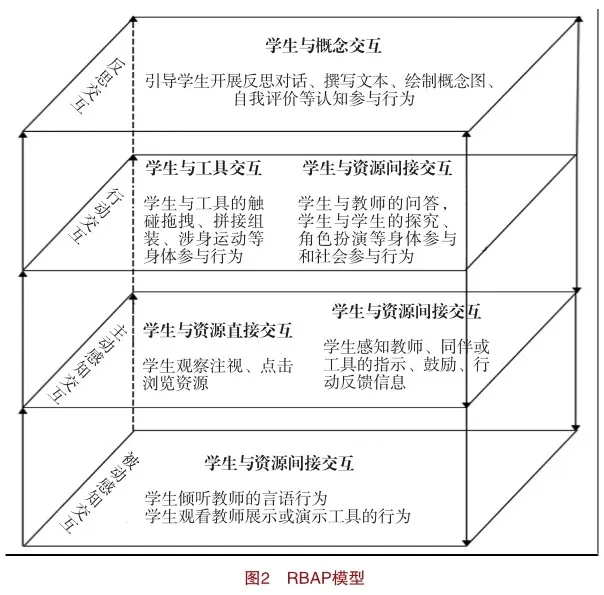
五、結語