一種基于相控陣列天線的超高頻射頻識別相對定位方法
2024-11-14 00:00:00史偉光劉鵬輝
天津工業大學學報 2024年5期

摘 " "要: 針對已有相對定位方法存在環境依賴程度大、定位精度低等問題,提出一種基于相控陣天線的超高頻(UHF)射頻識別(RFID)相對定位方法,該方法通過調節相控陣天線的激勵參數來改變天線的輻射方向,以獲取目標標簽的收信場強輪廓,有效降低了系統對環境和場地的依賴程度;同時,提出一種基于輪廓陡峭程度的相對位置估計方法,該方法首先利用輪廓最高點的時間戳信息將目標標簽分為兩組,然后計算每一組標簽的整體輪廓陡峭程度進而估計其相對位置。仿真結果表明:相比于傳統相對定位方法,所提相對定位方法能夠有效提高定位精度,降低排序偏差;在信噪比為20~30 dB時,性能提高了7.7%~21.6%。上述結果證實了本文方法的有效性。
關鍵詞: 射頻識別;相對定位;相控陣天線;定位精度;超高頻
中圖分類號: TP391.4 " " " " " "文獻標志碼: A " " " " " " " "文章編號: "1671-024X(2024)05-0082-07
A relative positioning method of UHF RFID based on phased array antenna
SHI Weiguang, LIU Penghui
(School of Electronics and Information Engineering, Tiangong University, Tianjin 300387, China)
Abstract: Aiming at the problems of the existing relative positioning methods, such as high environment dependence and low positioning accuracy, a phased array antenna based ultra high frequency radio frequency identification relative positioning method is proposed. By adjusting the excitation parameters of the phased array antenna, the radiation direction of the antenna is changed to obtain the received field strength profile of the target tag, which effectively reduces the system′s dependence on the environment and venue. Meanwhile, a relative position estimation method based on the steepness of the contour is proposed. The method first divides the targets into two groups based on the timestamp information of the highest point of the contour, and then calculates the overall contour steepness of each group of labels for sorting. The simulation results show that compared with the traditional relative positioning method, the proposed relative positioning method can effectively improve the positioning accuracy and reduce the sorting deviation. When the signal-to-noise ratio is 20-30 dB, the performance is improved by 7.7%-21.6%. The above results confirm the effectiveness of the method prepare in this paper.
Key words: radio frequency identification(RFID); relative positioning; phased array antenna; positioning accuracy; ultra high frequency(UHF).
隨著科技的不斷發展,基于物聯網的需求不斷增加[1-4],射頻識別(radio frequency identification, RFID)作為物聯網的關鍵推動力,不斷提高自身市場份額,已在大多應用場景中取代了傳統的條形碼技術[5-9]。在行李傳送帶、圖書管理等目標密集分布的應用場景中,相比于目標的絕對位置信息,RFID系統更關心個體在密集群體中的相對位置。圍繞基于RFID的相對定位,國內外學者提出了多種相對定位方法[10-12]。麻省理工學院的Katabi等[10]提出了PinIt系統,利用合成孔徑雷達來提取環境中的多徑信息,基于多徑輪廓和動態時間規整技術獲得標簽的位置信息。清華大學的Shangguan等[11-13]提出了OTrack和STPP算法用于解決流水線場景和圖書場景中的定位問題。OTrack算法建立一個用于識別瞬態臨界區域的概率模型,利用OTrack協議監測讀取率的關鍵區域以獲取標簽的相對次序;STPP算法通過移動閱讀器天線來獲取標簽相位輪廓,利用峰值位置的時間戳信息來獲取標簽的空間順序。
盡管上述相對定位方法獲得了較好的效果,但仍存在以下挑戰:首先是PinIt系統需利用通用軟件無線電設備,對設備功能提出了較高要求,且在實際使用過程中需布設參考標簽,加劇了應用局限性;其次是OTrack和STPP均采用具有固定輻射模式的微帶天線作為閱讀器天線。為了獲取相位或收信場強的輪廓信息,閱讀器天線通常需要被搭載在可移動設備上,進一步增加了系統對環境以及場地的依賴程度。此外,OTrack和STPP利用收信場強輪廓和相位輪廓的最高點時間戳信息作為定位依據,但上述單點時戳數據相對于噪聲的魯棒性較差,易造成排序偏差。
針對上述問題與不足,本文設計了一種基于相控陣天線的超高頻RFID相對定位方法,相控陣天線的可調輻射模式可以有效代替閱讀器的移動過程,降低了系統對環境和場地的需求。在此基礎上,以提高定位精度為目的,本文設計了一種基于輪廓陡峭程度的位置判別方法,該方法可改善由單點時間戳作為定位依據所引發的排序錯誤問題。
1 傳統相對定位方法
1.1 相對定位場景描述
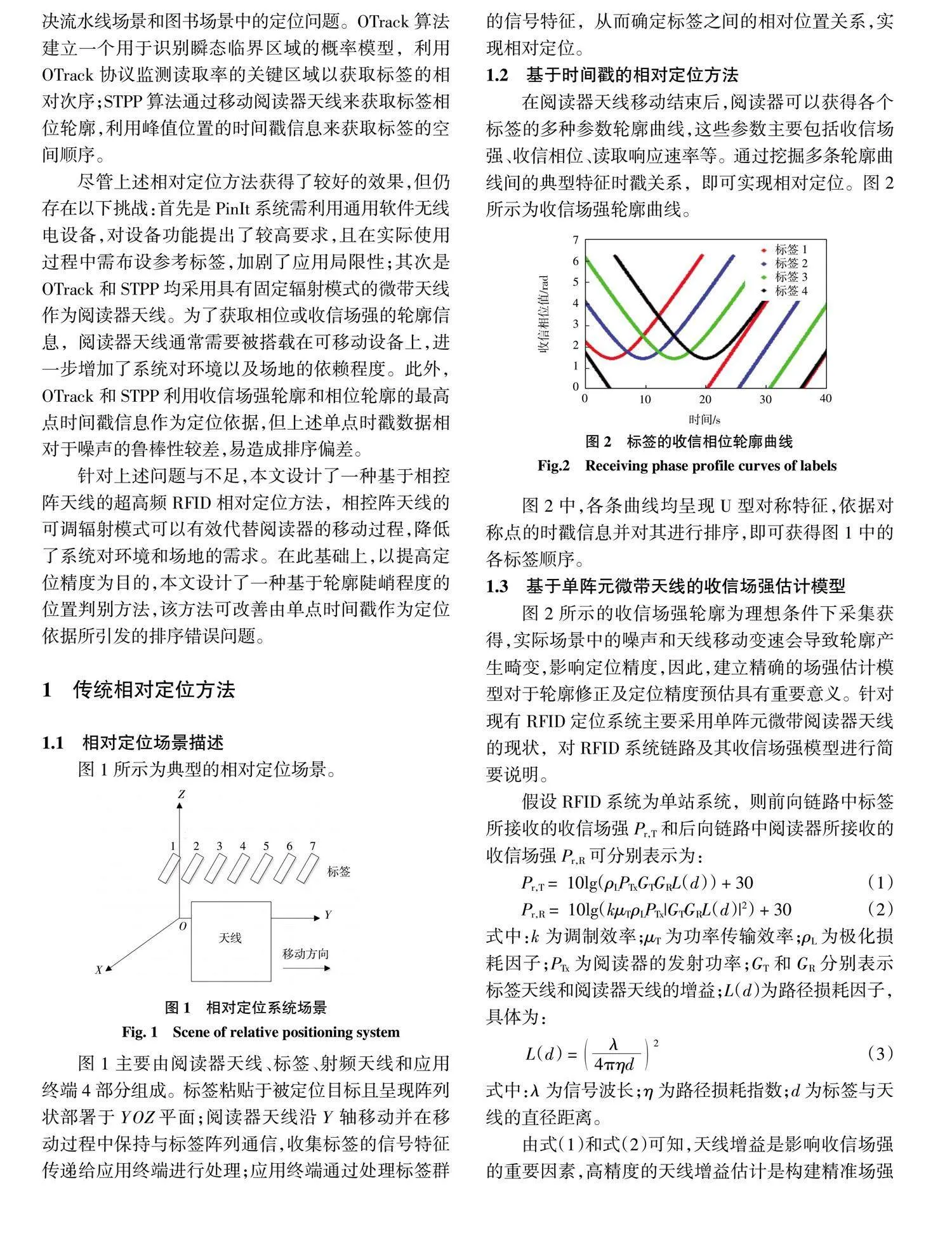
圖1所示為典型的相對定位場景。
圖1主要由閱讀器天線、標簽、射頻天線和應用終端4部分組成。標簽粘貼于被定位目標且呈現陣列狀部署于YOZ平面;閱讀器天線沿Y軸移動并在移動過程中保持與標簽陣列通信,收集標簽的信號特征傳遞給應用終端進行處理;應用終端通過處理標簽群的信號特征,從而確定標簽之間的相對位置關系,實現相對定位。
1.2 基于時間戳的相對定位方法
在閱讀器天線移動結束后,閱讀器可以獲得各個標簽的多種參數輪廓曲線,這些參數主要包括收信場強、收信相位、讀取響應速率等。通過挖掘多條輪廓曲線間的典型特征時戳關系,即可實現相對定位。圖2所示為收信場強輪廓曲線。
圖2中,各條曲線均呈現U型對稱特征,依據對稱點的時戳信息并對其進行排序,即可獲得圖1中的各標簽順序。
1.3 基于單陣元微帶天線的收信場強估計模型
圖2所示的收信場強輪廓為理想條件下采集獲得,實際場景中的噪聲和天線移動變速會導致輪廓產生畸變,影響定位精度,因此,建立精確的場強估計模型對于輪廓修正及定位精度預估具有重要意義。針對現有RFID定位系統主要采用單陣元微帶閱讀器天線的現狀,對RFID系統鏈路及其收信場強模型進行簡要說明。
假設RFID系統為單站系統,則前向鏈路中標簽所接收的收信場強Pr,T和后向鏈路中閱讀器所接收的收信場強Pr,R 可分別表示為:
Pr,T = "10lg(ρLPTxGTGRL(d)) + 30(1)
Pr,R = "10lg(kμT ρLPTx|GTGRL(d)|2) + 30(2)
式中:k為調制效率;μT為功率傳輸效率;ρL為極化損耗因子;PTx為閱讀器的發射功率;GT和GR分別表示標簽天線和閱讀器天線的增益;L(d)為路徑損耗因子,具體為:
式中:λ為信號波長;η為路徑損耗指數;d為標簽與天線的直徑距離。
由式(1)和式(2)可知,天線增益是影響收信場強的重要因素,高精度的天線增益估計是構建精準場強輪廓的基礎。
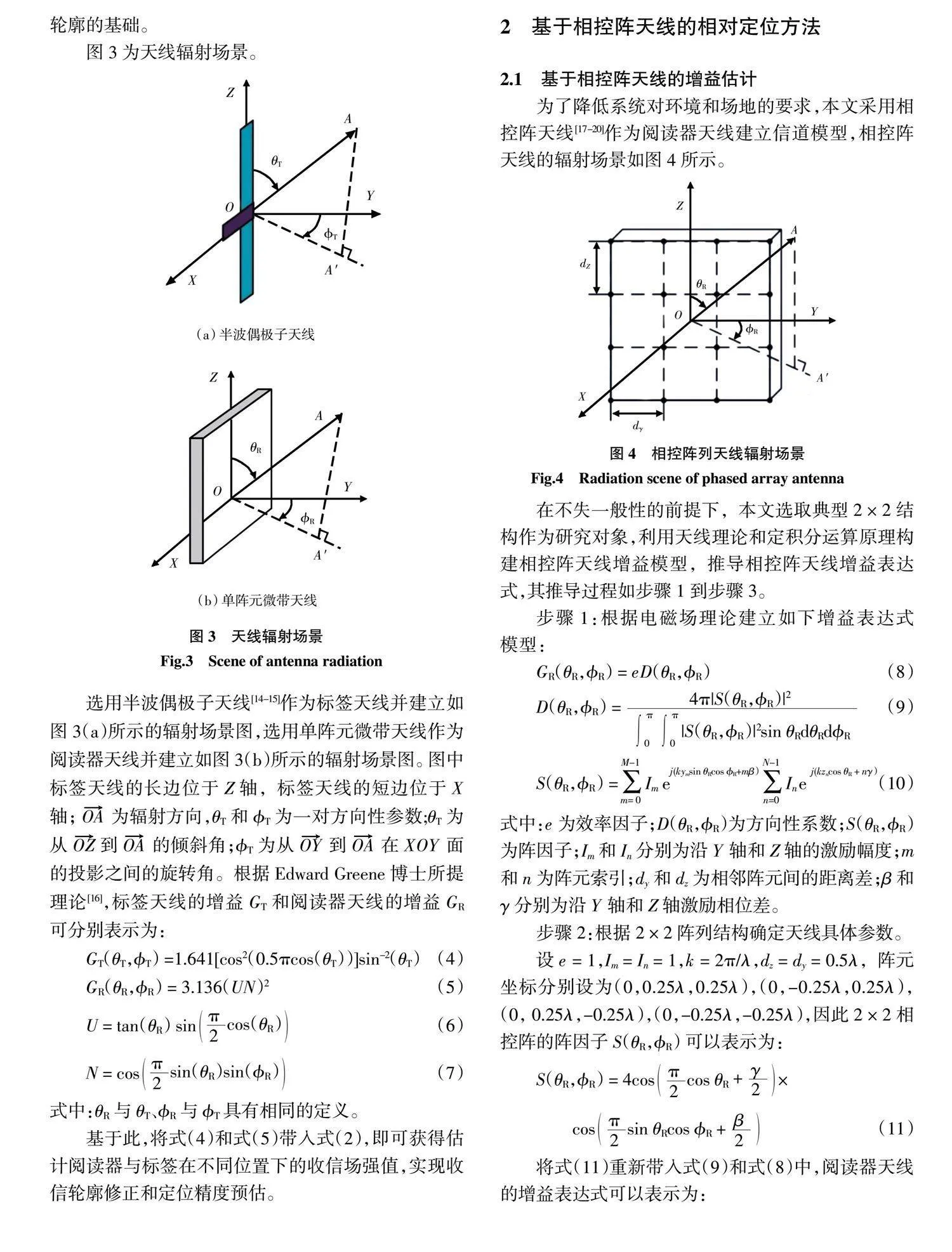
圖3為天線輻射場景。
基于此,將式(4)和式(5)帶入式(2),即可獲得估計閱讀器與標簽在不同位置下的收信場強值,實現收信輪廓修正和定位精度預估。
2 基于相控陣天線的相對定位方法
2.1 基于相控陣天線的增益估計
為了降低系統對環境和場地的要求,本文采用相控陣天線[17-20]作為閱讀器天線建立信道模型,相控陣天線的輻射場景如圖4所示。
在不失一般性的前提下,本文選取典型2 × 2結構作為研究對象,利用天線理論和定積分運算原理構建相控陣天線增益模型,推導相控陣天線增益表達式,其推導過程如步驟1到步驟3。
步驟1:根據電磁場理論建立如下增益表達式模型:
式中:e為效率因子;D(θR,?準R)為方向性系數;S(θR,?準R)為陣因子;Im和In分別為沿Y軸和Z軸的激勵幅度;m和n為陣元索引;dy和dz為相鄰陣元間的距離差;β和γ分別為沿Y軸和Z軸激勵相位差。
步驟2:根據2 × 2陣列結構確定天線具體參數。
設e = 1,Im = In = 1,k = 2π/λ,dz = dy = 0.5λ,陣元坐標分別設為(0,0.25λ,0.25λ),(0,-0.25λ,0.25λ),(0, 0.25λ,-0.25λ),(0,-0.25λ,-0.25λ),因此2 × 2相控陣的陣因子S(θR,?準R) 可以表示為:
由式(15)—式(17)可知,相控陣天線的增益表達式除與方向性參數θR和?準R有關外, 還與相控陣天線的激勵相位差β和γ有關,因此相對定位系統可通過調節激勵狀態實現改變天線輻射方向的目的,有效降低系統對可移動設備的需求。
2.2 基于輪廓陡峭程度的位置估計方法
為改善傳統方法魯棒性差的問題,本文提出了一種改進的相對定位方法,該方法通過考慮整個輪廓的變化趨勢以提高定位精度。
首先,本文基于相控陣天線所構建的信道模型,建立如圖1所示的相對定位系統場景。在該場景中,標簽沿Y軸排列,相控陣天線放置在標簽分布中心且正對標簽放置,系統通過調節激勵相位差β和γ,使陣列天線的主瓣方向由Y軸正半軸0°到Y軸負半軸180°進行旋轉,圖5為主瓣旋轉到120°時的陣列天線增益方向。在旋轉過程中,陣列天線的主瓣依次掃過標簽7到標簽1,從而獲得如圖6所示的各標簽的收信輪廓。
根據陣列天線理論可知,隨著激勵的改變,天線方向圖也將不斷變化,從而導致不同標簽所獲得的收信輪廓的差異較大。具體來說,調節激勵使主瓣方向靠近90°附近時,其天線方向圖的增益變化較大,而在距離90°較遠時,天線方向圖的增益變化較小。以圖6為例,主瓣方向在90°附近時,各標簽的收信輪廓的陡峭程度均明顯增大,而在距離90°較遠時,各標簽的收信輪廓的陡峭程度明顯減小。當標簽靠近陣列天線時,其輪廓最高點易出現在主瓣為90°附近,進而導致該標簽收信輪廓最高點的幅值變化較大,此時基于時間戳的判別方法具有較好的定位精度。然而,當標簽距離陣列天線較遠時,其輪廓最高點易出現在主瓣為0°或180°附近,進而導致該標簽收信輪廓最高點的幅值變化較小,此時系統更易于將最高點的邊緣點誤判為最高點,進而導致定位偏差。
基于以上現象,本文利用整個輪廓的變化趨勢作為定位依據,改善以單點數據進行相對定位所導致排序偏差的問題。具體步驟為:
步驟1:由于靠近陣列天線的標簽輪廓在最高點的選取過程中不易誤判,因此,本文首先根據收信輪廓最高點的時間戳信息將標簽分為2組。其中1組位于陣列天線的左側,另1組位于陣列天線的右側。
步驟2:在每組標簽中,分別根據公式(18)計算每個標簽的輪廓陡峭程度,并以此作為相對定位的判別依據。
式中:K為標簽輪廓陡峭程度;L為收信輪廓的取樣點數。
步驟3:對于陣列天線的左側標簽,對值進行升序排列,以獲取左側標簽的位置信息。對于陣列天線的右側標簽,對值進行降序排列,以獲取右側標簽的位置信息。最后,將兩側標簽位置信息進行組合,以獲取全部標簽的位置信息。
3 仿真分析
3.1 參數設定
本文根據圖1所示的相對定位場景搭建仿真模型,進行算法性能分析。在該場景中,標簽沿Y軸依次放置,閱讀器天線置于標簽正對放置。具體仿真參數如表1所示。
3.2 性能分析
3.2.1 不同噪聲下的相對定位性能評估
首先分析基于時間戳和基于輪廓陡峭程度2種相對定位算法在不同噪聲條件下的性能。式(19)為相對定位的評估標準:
C = NT / NTotal " " (19)
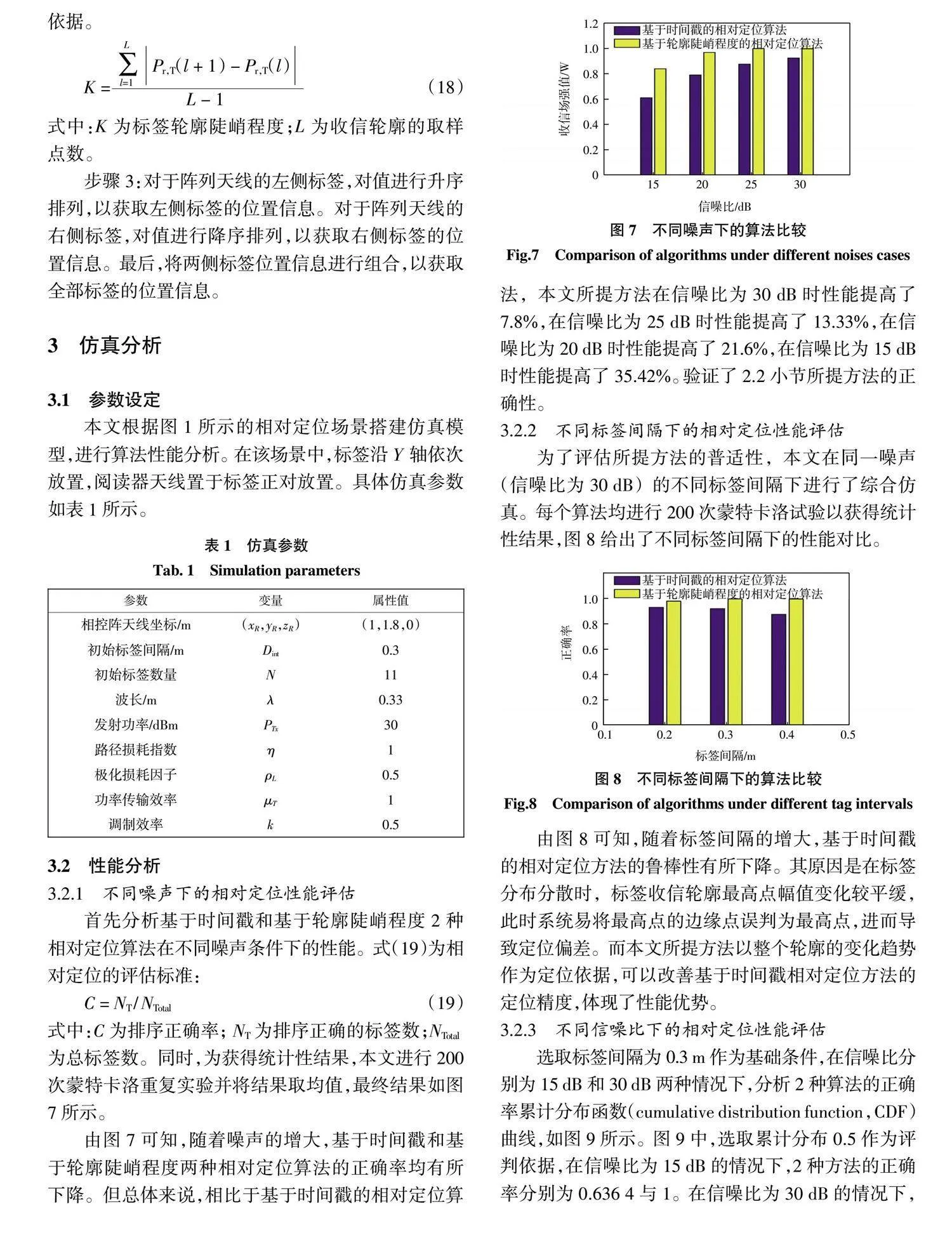
式中:C為排序正確率; NT為排序正確的標簽數;NTotal "為總標簽數。同時,為獲得統計性結果,本文進行200次蒙特卡洛重復實驗并將結果取均值,最終結果如圖7所示。
由圖7可知,隨著噪聲的增大,基于時間戳和基于輪廓陡峭程度兩種相對定位算法的正確率均有所下降。但總體來說,相比于基于時間戳的相對定位算法,本文所提方法在信噪比為30 dB時性能提高了7.8%,在信噪比為25 dB時性能提高了13.33%,在信噪比為20 dB時性能提高了21.6%,在信噪比為15 dB時性能提高了35.42%。驗證了2.2小節所提方法的正確性。
3.2.2 不同標簽間隔下的相對定位性能評估
為了評估所提方法的普適性,本文在同一噪聲(信噪比為30 dB)的不同標簽間隔下進行了綜合仿真。每個算法均進行200次蒙特卡洛試驗以獲得統計性結果,圖8給出了不同標簽間隔下的性能對比。
由圖8可知,隨著標簽間隔的增大,基于時間戳的相對定位方法的魯棒性有所下降。其原因是在標簽分布分散時,標簽收信輪廓最高點幅值變化較平緩,此時系統易將最高點的邊緣點誤判為最高點,進而導致定位偏差。而本文所提方法以整個輪廓的變化趨勢作為定位依據,可以改善基于時間戳相對定位方法的定位精度,體現了性能優勢。
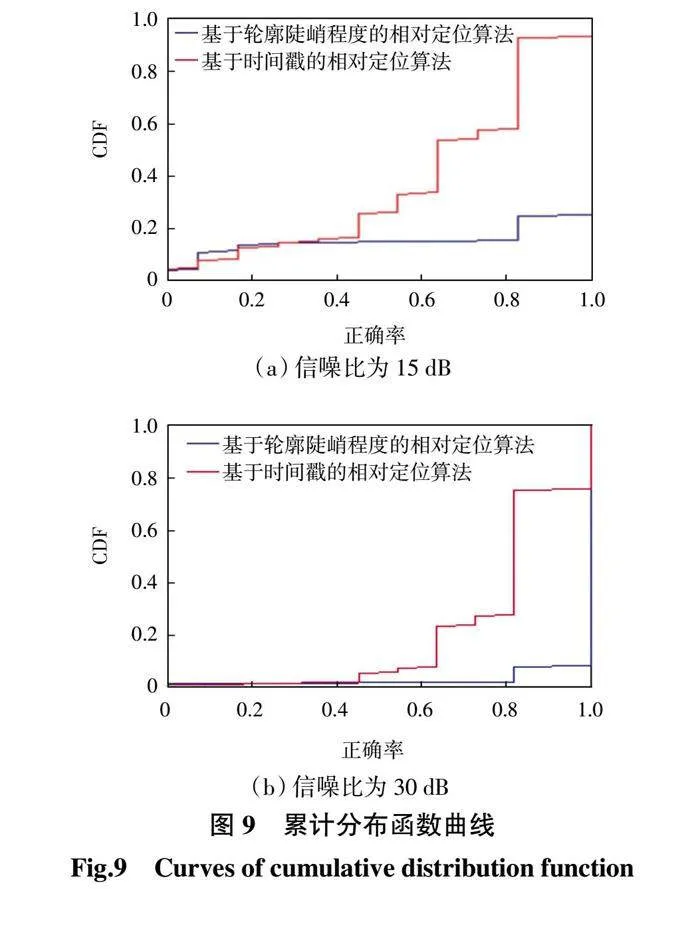
3.2.3 不同信噪比下的相對定位性能評估
選取標簽間隔為0.3 m作為基礎條件,在信噪比分別為15 dB和30 dB兩種情況下,分析2種算法的正確率累計分布函數(cumulative distribution function,CDF)曲線,如圖9所示。圖9中,選取累計分布0.5作為評判依據,在信噪比為15 dB的情況下,2種方法的正確率分別為0.636 4與1。在信噪比為30 dB的情況下,2種方法的正確率分別為0.727 3和1。上述結果證實了所提算法在多種噪聲條件下均具備良好的定位精度。
4 結 論
本文針對已有相對定位系統所存在的問題,提出了一種基于相控陣天線的相對定位系統。
(1) 利用相控陣的可調輻射模式,代替傳統單陣元天線的固定輻射模式,規避了傳統算法中閱讀器天線的移動,降低了系統對環境和場地的需求。
(2) 提出了一種基于輪廓陡峭程度的相對定位方法,利用整個輪廓的波動情況有效解決傳統方法由單一數據點作為定位依據所導致的排序錯誤問題。實驗表明,在信噪比為20~30 dB時,定位準確率提高了7.7%~21.6%,證實了所提系統的性能。
需指出,本文研究僅考慮在一維空間下對目標進行定位。后續研究將力爭在二維和三維空間下改善已有相對定位算法的定位精度。
參考文獻:
[1] " THOMAS S J. RFID for everyone: An easily-accessible, experimental UHF RFID platform[J]. IEEE Journal of Radio Frequency Identification, 2020, 4(1): 46-54.
[2] " WANG X Y, ZHANG "J, YU Z T, el al. On remote temperature sensing using commercial UHF RFID tags[J]. IEEE Internet of Things Journal, 2019, 6(6): 10715-10727.
[3] " HE D B, ZEADALLY S. An analysis of RFID authentication schemes for Internet of Things in healthcare environment using elliptic curve cryptography[J]. IEEE Internet of Things Journal, 2015, 2(1): 72-83.
[4] " "ZHANG G F, TAO S, XIAO W A, et al. A fast universal RFID tag anti-collision algorithm for the Internet of Things[J]. IEEE Access, 2019, 7: 92365-92377.
[5] " "張超逸.基于人工智能和近場天線的RFID標簽定位方法研究[D]. 成都:電子科技大學,2020.
ZHANG C Y. Research on RFID tag positioning method based on artificial intelligence and near-field antenna[D]. Chengdu: University of Electronic Science and Technology of China, 2020(in Chinese).
[6] " "路祥.無線定位技術在室內移動平臺上的應用研究[D]. 合肥:中國科學技術大學, 2020.
LU X. Research on wireless localization to mobile platform in GPS denied environments[D]. Hefei: University of Science and Technology of China, 2020(in Chinese).
[7] " "梁勝濤, 陳良坤, 舒奇奇, 等. 基于無線通信與RFID定位的智能倉儲系統的設計[J].自動化技術與應用,2020,39 (1): 169-172.
LIANG S T, CHEN L K, SHU Q Q, et al. Design of intelligent storage system based on wireless communication and RFID positioning[J]. Techniques of Automation and Applications, 2020,39(1): 169-172(in Chinese).
[8] " "SUNDARESAN S, DOSS R, ZHOU W L. Zero knowledge grouping proof protocol for RFID EPC C1G2 tags[J]. IEEE Transactions on Computers, 2015, 64(10): 2994-3008.
[9] " "YANG C N, HU L J, LAI J B. Query tree algorithm for RFID tag with binary-coded decimal EPC[J]. IEEE Communications Letters, 2012, 16(10): 1616-1619.
[10] "WANG J, KATABI D. Dude, where′s my card?: RFID positioning that works with multipath and non-line of sight[C]//Proceedings of the ACM SIGCOMM 2013 conference on SIGCOMM. Hong Kong, China:ACM,2013:51-62.
[11] "SHANGGUAN L F, LI Z J, YANG Z, el al. OTrack: Towards order tracking for tags in mobile RFID systems[J]. IEEE Transactions on Parallel and Distributed Systems, 2014, 25(8): 2114-2125.
[12] "SHANGGUAN L F, YANG Z, LIU A X, el al. STPP: Spatial-temporal phase profiling-based method for relative RFID tag localization[J]. IEEE/ACM Transactions on Networking, 2017, 25(1): 596-609.
[13] "SHI W G, DU J X, CAO X W, el al. IKULDAS: An improved kNN-based UHF RFID indoor localization algorithm for dire-ctional radiation scenario[J]. Sensors, 2019, 19(4): 968.
[14] "ZHOU Z, WEI Z H, TANG Z Y, et al. Design and analysis of a wideband multiple-microstrip dipole antenna with high isola-tion[C]//IEEE Antenna and Wireless Propagation Letters. [s.l.]:IEEE, 2019, 722-726.
[15] "HE K, GONG S X, GAO F. A wideband dual-band magneto-electric dipole antenna with improved feeding structure[J]. IEEE Antenna and Wireless Propagation Letters, [s.l.]: IEEE, 2014: 1729-1732.
[16] "郭陽. 無線可充電傳感器網絡中的定位算法研究[D]. 天津:天津工業大學,2018.
GUO Y. Research on location algorithm in wireless rechargeable sensor network[D]. Tianjin: Tianjin Polytechnic University, 2018(in Chi-nese).
[17] "OULD-ELHASSEN M, MABROUK M, GHAZEL A, el al. Improved coverage of phased array antennas used for RFID applications[C] //2013 IEEE International Symposium on Phased Array Systems and Technology. Waltham, MA, USA: IEEE,2013: 553-558.
[18] "RAI E, NISHIMOTO S, KATADA T, el al. Historical overview of phased array antennas for defense application in Japan[C]//Proceedings of International Symposium on Phased Array Systems and Technology. Boston,MA,USA:IEEE,2002: 217-221.
[19] "GAMPALA G, REDDY C J. Advanced computational tools for phased array antenna applizations[C]//2016 IEEE International Symposium on Phased Array Systems and Technology(PAST).Waltham,MA,USA:IEEE, 2016: 1-5.
[20] "BEOOKNER E. Phased arrays for the new millennium[C]//IEEE International Symposium on Phased Array Systems and Techno-logy. Boston,MA,USA:IEEE,2003: 617.
本文引文格式:
史偉光,劉鵬輝. 一種基于相控陣列天線的超高頻射頻識別相對定位方法[J]. 天津工業大學學報,2024, 43(5): 82-88.
SHI W G, LIU P H. A relative positioning method of UHF RFID based on phased array antenna[J]. Journal of Tiangong University, 2024, 43(5): 82-88(in Chinese).