汽車智能生產中工業機器人技術及其應用實踐
2024-11-21 00:00:00肖瀟李健瑤
專用汽車 2024年11期

摘要:為提升汽車智能生產的效率與質量,對工業機器人的結構和特點進行詳細探討,并對車身裝配、涂裝作業、動力系統組裝、內飾安裝及質量控制與檢測等方面的實際應用進行了研究。結果表明,工業機器人在減少人工干預、提高生產效率、降低生產成本和提升產品質量方面具有顯著優勢,推動了汽車制造業向智能化和自動化方向的發展。
關鍵詞:工業機器人;汽車生產;智能制造;自動化集成;應用實踐
中圖分類號:U469 收稿日期:2024-08-16
DOI:10.19999/j.cnki.1004-0226.2024.11.028
1 工業機器人對汽車智能生產的重要性
在汽車智能生產中,工業機器人提高了生產效率與產品質量。福特羅馬尼亞工廠使用的UR10型協作機器人便加速了生產過程,同時減輕了員工的重復性勞動壓力。機器人技術優化成本結構,提高了操作的安全性,根據麥肯錫的報告,預計未來5年內自動化將占工業公司資本支出的25%。此技術在降低成本和延長運行時間方面的潛力得到了體現[1]。然而,機器人的引入也對勞動市場產生了影響,在美國,每增加1 000名工人中的一個機器人,會導致平均工資下降0.42%,就業人口比率下降0.2個百分點。
2 汽車智能生產中工業機器人構成
2.1 常用機器人類型及其特點
2.1.1 關節機器人
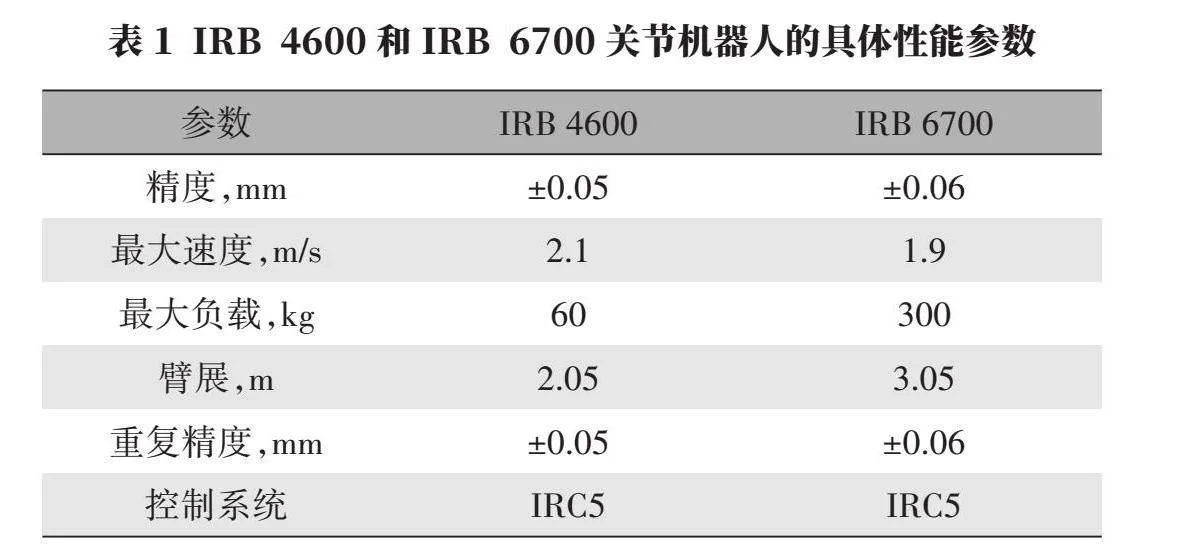
關節機器人類似于人類手臂,通常具備4~6個旋轉關節,能夠靈活操作并執行復雜任務。關節機器人的高精度和重復性使其在裝配、焊接和材料處理等應用中表現卓越。如表1所示,以ABB的IRB 4600和IRB 6700為例,這些機器人分別具備±0.05 mm和±0.06 mm的精度,最大速度為2.1 m/s和1.9 m/s,最大負載能力為60 kg和300 kg。在實際應用中,福特羅馬尼亞工廠采用的UR10協作機器人顯著提升了生產效率,并減輕了工人的重復性勞動負擔。關節機器人在緊湊和高密度布局的制造環境中尤為適用,能夠優化生產輸出并提高產品質量[2]。其高精度和快速運動能力,使其在不同工藝環節中均能保證操作的一致性和產品的高質量,從而減少人為錯誤和生產成本。
2.1.2 SCARA機器人
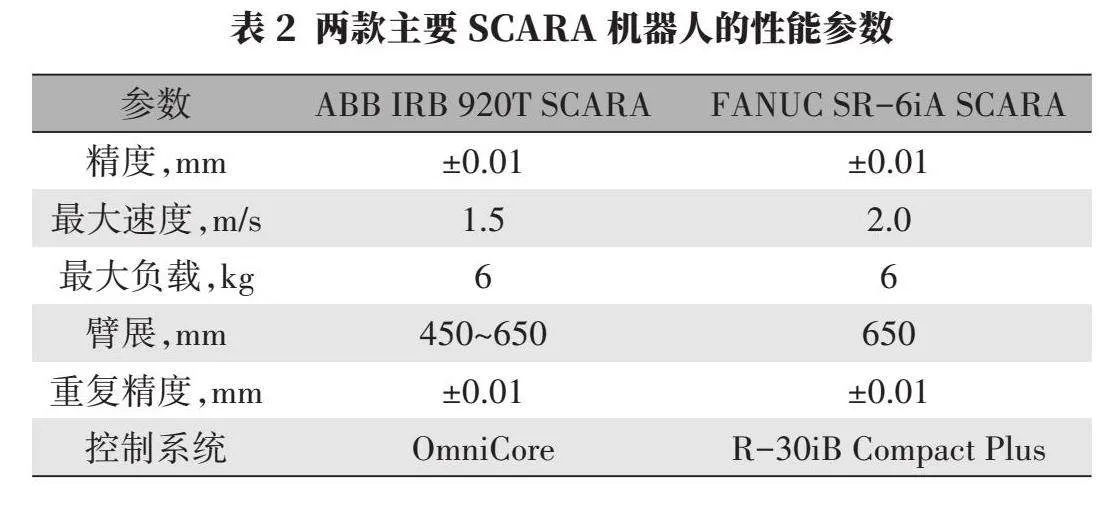
SCARA機器人特別適用于高精度、高速的裝配、搬運和測試任務,其水平運動靈活性和高重復性使其能在狹小空間內高效執行復雜操作。如表2所示,ABB的IRB 920T SCARA機器人循環時間為0.29 s,精度為±0.01 mm,最大速度為1.5 m/s,最大負載為6 kg。FANUC的SR-6iA SCARA機器人具有650 mm臂展,精度為±0.01 mm,最大速度為2.0 m/s,最大負載為6 kg。而OMRON的i4系列SCARA機器人支持15 kg負載,集成以太網通信,實現了高效控制,適用于多品種生產環境。SCARA機器人的技術進步推動了制造業的智能化和自動化轉型,提升了企業的市場競爭力,同時降低了生產成本,展現了其在現代制造業中的重要價值[3]。
2.1.3 卡通機器人
卡通機器人在工業自動化中因其高精度和高負載能力而被廣泛應用。基于笛卡爾坐標系統,其能夠在X、Y和Z軸上移動,適用于需要高精度和高重復性的任務。如表3所示,Nordson EFD的PROX系列卡通機器人在電子和生命科學領域表現突出,具備0.003 mm的重復精度和15 kg的最大負載能力,運動速度可達800 mm/s。Yamaha的NXY系列則具有0.02 mm的重復精度和最高40 kg的負載能力,臂展范圍從50~3 050 mm。該機器人的結構簡單,由直線軸和高質量的機械傳動組件組成,確保了其在高負載條件下的精確操作。
2.1.4 并聯機器人
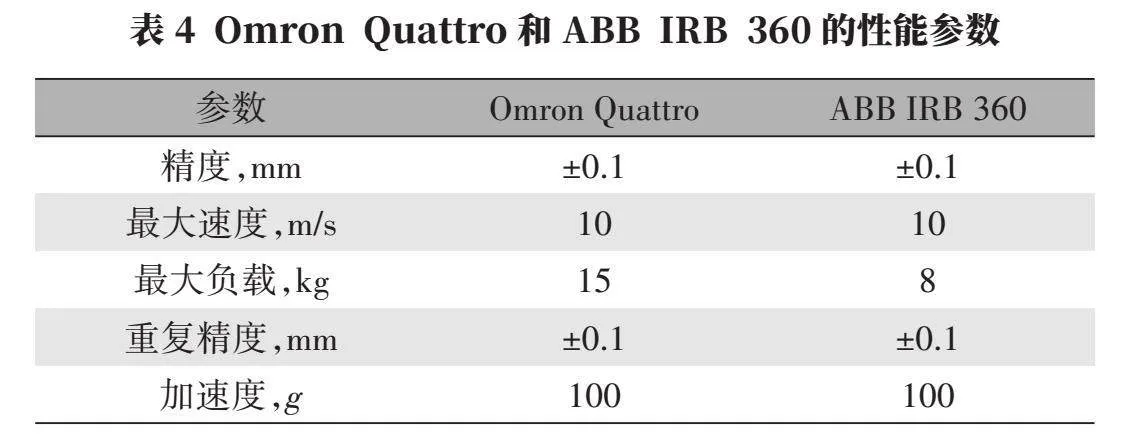
并聯機器人的設計包括多個計算機控制的支撐臂,這些臂連接在一個共同的工作平臺上,形成閉環結構,從而提供了優越的剛性和動態性能。根據表4可知,Omron Quattro并聯機器人具有±0.1 mm的精度和高達10 m/s的最大速度,以及15 kg的最大負載能力,表現出色。ABB的IRB 360并聯機器人則在電子裝配中廣泛應用,具有相同的精度和速度,最大負載為8 kg。并聯機器人在高速分揀、包裝和組裝等任務中表現優異,其高加速度提高了生產效率和產量。并聯機器人的剛性和負載能力使其在復雜裝配任務中實現了精確和快速的操作,提升了生產效率和產品質量,減少了人為誤差和生產成本。
2.2 關鍵技術組件
2.2.1 傳感技術
傳感器通過檢測和反饋位置、速度、力和溫度等物理量的變化,實現機器人精準執行復雜任務。光電傳感器利用光的反射或遮擋檢測物體位置和運動狀態,廣泛應用于物體檢測和識別。激光傳感器通過激光束測量距離和位置,具有高精度和快速響應能力,適用于高精度裝配和焊接。力矩傳感器檢測機器人末端執行器的力和力矩,幫助實現精細操作和實時調整,提高裝配質量和效率。多傳感器融合技術通過綜合激光雷達、攝像頭和毫米波雷達的數據,實現全面精確的環境感知與決策,確保高效安全的生產過程[4]。
2.2.2 控制系統
集成與自動化解決方案通過將多個機器人、設備和系統無縫結合,實現高度協同的生產環境。硬件集成包括機器人與傳送帶、加工設備和檢測儀器的物理連接,確保高效運轉。軟件集成通過統一的控制平臺,集中監控和調度各設備。信息集成利用物聯網(IoT)和工業互聯網(IIoT)技術,實時采集、分析和共享生產數據,為決策提供支持。自動化系統依賴PLC和DCS進行協調,先進的控制算法如模型預測控制和自適應控制優化生產過程。機器人過程自動化(RPA)減少人工干預,提高效率。
2.2.3 執行機構和驅動器
電動執行機構通過電機、齒輪和滾珠絲杠等機制,將電能轉化為機械能,提供高精度和快速響應能力。無刷直流電機(BLDC)因其高效率和良好的熱性能,廣泛應用于工業機器人,配合高精度編碼器實現亞毫米級別的定位精度。液壓執行機構則以其高功率密度和負載能力,適用于重型任務,通過液壓泵和液壓缸系統,實現高力矩輸出。氣動執行機構利用壓縮空氣驅動氣缸,適合輕型任務和高速操作。驅動器作為控制核心,集成矢量控制、伺服控制和模型預測控制等技術,確保機器人在復雜環境中的高效、穩定和精確操作。
2.3 集成與自動化解決方案
集成與自動化解決方案主要通過將多個機器人、設備和系統無縫結合,形成高度協同的生產環境,實現硬件、軟件和信息的多層次協調。PLC和DCS在自動化系統中發揮核心作用,利用先進的控制算法如模型預測控制和自適應控制,優化生產過程。機器人過程自動化(RPA)通過執行重復性任務,減少人工干預,提高效率。工業大數據和人工智能技術進一步提升了系統的智能化水平,通過實時分析和建模,優化生產參數,提供智能決策支持。
3 工業機器人在汽車智能生產中的應用
3.1 車身裝配
在車身裝配環節中,點焊機器人實現了每分鐘數百次的焊接操作,確保焊點均勻牢固;激光焊接機器人則憑借高精度和低熱變形優勢,廣泛應用于車身薄板和復雜結構的連接。密封膠涂敷機器人通過精確控制膠槍移動軌跡和速度,確保密封膠均勻涂布,提高防水防塵效果。螺栓安裝機器人利用高精度力矩控制系統,確保每個螺栓扭力一致,保障車身結構的安全性和耐用性。借助先進的視覺傳感器和實時監控系統,機器人在裝配過程中能自動檢測和校正偏差,提高裝配精度。
3.2 涂裝作業
涂裝機器人利用多軸運動系統和精密控制技術,實現車身表面涂層的均勻覆蓋。采用靜電噴涂技術,高壓靜電場使油漆顆粒均勻吸附在車身表面,減少漆料浪費和環境污染。高精度噴涂系統和先進傳感器在涂裝過程中實時監控和調整噴涂參數,確保涂層厚度均勻。視覺識別技術使機器人能自動檢測車身的復雜形狀和輪廓,優化噴涂路徑,避免漏噴和過噴現象。涂裝機器人的自動化操作減少了人為干預,保證了每輛車的涂裝質量一致性和外觀美觀性。為確保生產環境的安全,涂裝機器人在密閉噴涂室內工作,配備廢氣處理系統和防爆裝置,減少有害物質排放,保護工人健康。
3.3 動力系統組裝
動力系統組裝涉及發動機、變速箱和驅動軸等關鍵部件,需要極高的精度和一致性。通過多軸聯動和先進的運動控制技術,工業機器人實現了對各部件的精確定位和裝配。機器人利用高精度力矩傳感器和視覺識別系統,精確控制螺栓的扭力和位置,確保緊固力均勻一致,并實時檢測校正部件的位置和角度,防止裝配錯誤。在變速箱裝配中,自動化裝配線實現了齒輪、軸承和密封件的精準裝配。自動化控制系統實時監測裝配過程中的各項參數,如裝配力和位置誤差,及時調整策略,提高裝配質量和效率。機器人焊接系統利用激光和電弧焊技術,確保焊接接頭的強度和質量。自動膠合系統通過精確控制膠槍的移動軌跡和速度,確保密封膠的均勻涂布,提升密封性能。
3.4 內飾安裝
內飾安裝包括座椅、儀表板、門板、地毯和頂棚等多個部件的裝配,其操作要求極高的精度和一致性。機器人利用視覺識別系統和力矩控制技術,實現內飾部件的精準定位和安裝。在座椅安裝過程中,機器人通過視覺系統識別座椅位置,并進行精確調整,確保座椅與車身的完美對接。力矩控制技術確保每個固定螺栓的扭矩一致,避免過緊或過松的情況,保障安裝的穩定性和安全性。儀表板的安裝同樣需要高精度,機器人通過編程設定的路徑和速度,將儀表板精確安裝到指定位置,確保每個連接點都準確無誤。門板和地毯安裝中,機器人利用真空吸附和自動夾持技術,準確抓取和放置部件,減少人為操作帶來的誤差。頂棚安裝涉及高空作業,機器人通過靈活的多軸聯動系統,實現頂棚的平穩安裝,提高作業的安全性和效率。
3.5 質量控制與檢測
通過高精度檢測設備和先進的數據分析技術,機器人實現了對產品質量的一致性和可靠性的保障。視覺檢測系統利用高分辨率相機和圖像處理算法,快速識別表面缺陷、形狀誤差和裝配錯位,生成詳細檢測報告。激光測量技術通過高速掃描車身表面,生成三維點云數據,與CAD模型進行比對,精確測量尺寸誤差和形變。超聲波技術通過發射和接收超聲波,檢測焊接點、粘接部位和復合材料內部的空隙和裂紋。通過與MES和ERP系統的集成,機器人實現檢測數據的實時上傳和分析,生成質量報告和統計分析,提高檢測精度和效率,降低人工成本和錯誤率,確保每輛汽車出廠前經過嚴格質量檢驗,滿足高標準質量要求。
4 結語
工業機器人在汽車智能生產中的應用提升了各環節的效率和質量,具體體現在車身裝配、涂裝作業、動力系統組裝、內飾安裝及質量控制與檢測等方面。未來應集成人工智能與大數據分析技術,持續優化生產流程,推動汽車制造業向更高效、更智能的方向發展。
參考文獻:
[1]李云革.工業機器人智能檢測技術在汽車制造中的應用[J].汽車周刊,2023(11):31-33.
[2]侯曉楠,楊尊熙.談工業機器人在汽車制造領域的應用[J].時代汽車,2018(2):69-70.
[3]周秦源,胡賢哲.基于高階內模迭代學習的關節機器人控制研究[J].機械傳動,2024,48(1):20-27.
[4]陳威,陳新度.基于模糊PID的汽車門框打磨機器人主動柔順控制系統設計[J].現代電子技術,2021,44(10):171-175.
作者簡介:
肖瀟,男,1988年生,講師,研究方向為機電一體化技術。