基于奇異攝動的柔性關節機械臂魯棒控制
2024-12-03 00:00:00孟范偉曠建陳昊男付中樂
電機與控制學報 2024年10期









摘 要:針對柔性關節機械臂在擾動過大情況下難以實現高精確度軌跡跟蹤的問題,提出一種基于奇異攝動的魯棒控制方案。該方法不需要對連桿角加速度及其高階導數進行計算,因此該方法不受高階導數估計不準確的影響。首先,用奇異攝動法對原系統進行解耦,得到快慢兩個異時間尺度的二階子系統。然后,對慢子系統設計二次補償控制律,用擾動觀測器對擾動進行觀測后,進行首次補償;設計基于Hamilton-Jacobi-Issacs不等式理論的魯棒控制器進行二次補償,并證明當擾動有界時,系統跟蹤誤差將很快收斂于零。最后,對快子系統添加阻尼項,并通過Lyapunov穩定性定理與Lasalle不變性定理證明系統的穩定性。將所提控制方案與反饋線性化方案及奇異攝動PD 控制方案相對比, 結果表明,所提控制方案設計的系統具有較強的抗干擾能力及更好的動態、穩態性能。
關鍵詞:柔性關節;奇異攝動;機械臂;軌跡跟蹤;Hamilton-Jacobi-Issacs不等式;魯棒控制
DOI:10.15938/j.emc.2024.10.018
中圖分類號:TH165
文獻標志碼:A
文章編號:1007-449X(2024)10-0193-08
收稿日期: 2023-01-17
基金項目:國家自然科學基金(12162007)
作者簡介:孟范偉(1981—),男,博士,副研究員,研究方向為控制系統的魯棒設計、非線性控制;
曠 建(1999—),男,碩士, 研究方向為非線性控制、系統建模與仿真;
陳昊男(1999—),男,碩士, 研究方向為控制系統的魯棒設計、系統建模與仿真;
付中樂(1995—),男,碩士,研究方向為非線性控制。
通信作者:曠 建
Robust control of flexible joint manipulator based on singular perturbation
MENG Fanwei, KUANG Jian, CHEN Haonan, FU Zhongle
(School of Control Engineering, Northeastern University at Qinhuangdao, Qinhuangdao 066004, China)
Abstract:Aiming at the problem that in the flexible joint manipulator it is difficult to achieve high-precision trajectory tracking under the condition of large disturbance, a robust control scheme based on singular perturbation was proposed. This method does not need to calculate the angular acceleration of the connecting rod and its higher-order derivative, so it is not affected by the inaccurate estimation of the higher-order derivative. First, the singular perturbation method was used to decouple the original system, and two second-order subsystems with different time scales were obtained. Then, a multiple compensation control law was designed for the slow subsystem. After the disturbance was observed by the disturbance observer, the first compensation was performed; A robust controller based on Hamilton-Jacobi-Issacs inequality theory was designed for secondary compensation. And it is proved that when the disturbance is bounded, the system tracking error will quickly converge to zero. Finally, the damping term was added to the fast subsystem, and the stability of the system was proved by Lyapunov stability theorem and Lasalle invariance theorem. Comparing the proposed control scheme with the feedback linearization scheme and the singular perturbation PD control scheme, the results show that the system designed by the proposed control scheme has strong anti-interference ability and better dynamic and steady-state performance.
Keywords:flexible joint; singular perturbation; mechanical arm; track tracking; Hamilton-Jacobi-Issacs inequality; robust control
0 引 言
在過去的幾十年中, 柔性關節機械臂被應用到各種場景,其軌跡跟蹤控制問題也因此受到了廣泛的研究[1]。早期的研究中往往假設機械臂是完全剛性的,針對這一假設,國內外學者提出了多種控制方法,例如直接轉矩控制[2-3]、魯棒控制[4]、自適應控制[5]等。然而,由于關節中存在柔性齒輪、傳動帶、軸承等能量傳遞元件,傳統的控制方法對于一些剛性輕型機械臂難以獲得滿意的效果[6-7]。文獻[8]的研究強調了在控制器設計中考慮關節柔性的重要性。文獻[9]將柔性元件等效為線性扭轉彈簧,提出了柔性關節機械臂數學模型。此后,對柔性關節機械臂控制問題的研究大部分都是基于此模型的。
與剛性模型相比,柔性關節機械臂數學模型微分方程的階數明顯增加,此外機械臂工作環境的外部擾動和建模誤差導致控制器設計難度顯著增加[10]。為了提高控制系統的性能,多種方法被應用至柔性關節機械臂的軌跡跟蹤控制上,文獻[11]提出一種基于擾動觀測器的柔性關節機器人PD控制方案,利用擾動觀測器消除了擾動的影響并通過實驗驗證了所設計方案的有效性。文獻[12]在考慮輸出受限的情況下,設計了一種全狀態反饋神經網絡控制方案,不僅提升了機器人的安全性,而且提升了控制系統的魯棒性。文獻[13]對兩連桿柔性關節機械臂設計了一種滑模變結構控制器,系統狀態可以快速到達切換面,并具有較高的控制精確度。文獻[14]引入命令濾波器解決了柔性關節機械臂反步控制中對虛擬控制求導時項數爆炸的問題,并證明了閉環跟蹤誤差系統的穩定性。
跟蹤精確度越高的控制系統運行中往往需要越多狀態變量反饋,才能獲得理想的性能。一般來說, 高階導數值只能通過連桿角位移測量值多次求導或基于數學模型來計算[15]。然而,在極端工作環境下,受傳感器性能的影響,所獲得的反饋量未必準確[16],對測量值多次求導則會帶來更大的誤差。避免求取連桿角位移高階導數值帶來的巨大誤差, 奇異攝動法提供了一種理想的解決方案,可以將原系統進行解耦, 得到快慢兩個二階子系統進而分別設計控制器[17-19]。文獻[20]首先設計前饋控制律消除了非線性,然后利用奇異攝動法對柔性關節機械臂模型進行解耦處理,對兩個子系統設計了PD控制器,利用勞斯判據證明了控制系統的穩定性并給出選擇增益的方法。文獻[21]對解耦后的邊界層系統設計了增廣自適應控制律,仿真結果表明系統可以有效抑制關節振動。然而在深空、深海、深地、極地等極端環境下,柔性關節機械臂受高真空、強輻射、高低溫等各種外場及其耦合作用干擾[22],這些控制方法顯然難以達到理想的效果。為了克服傳統控制方案的不足,設計了奇異攝動魯棒控制的方案。
相比以往的成果,主要創新之處在于:1)設計多次補償控制律,設計非線性干擾觀測器,實現對未知干擾的有效觀測,對未知干擾進行首次補償;2)將全局終端滑模作為Hamilton-Jacobi-Issacs不等式理論的魯棒控制律的評價函數,設計基于Hamilton-Jacobi-Issacs不等式理論的魯棒控制器,對擾動進行二次補償,并證明當擾動有界時,擾動可以很快被補償。
1 動力學模型
將一個具有柔性關節的連桿機械臂作為被控對象,根據文獻[9]所做的研究,同時考慮機械臂工作環境中存在的擾動,可以得到被控對象的動力學模型為:
M(q)q··+C(q,q·)q·+g(q)=K(θ-q)+d1;(1)
Jθ··+K(θ-q)=u+d2。(2)
式中:d1∈Rn和d2∈Rn分別為連桿側和電機側未知外界的集總擾動;q、q·、q··∈Rn分別為連桿角位移、速度和加速度向量;θ、θ·、θ··∈Rn分別為經減速器作用后電機的轉子角位移、角速度和角加速度向量;M(q)∈Rn×n為慣性矩陣;C(q,q·)q·∈Rn為機械臂的科氏力和離心力向量;g(q)∈Rn為重力向量;對角正定矩陣K∈Rn×n表示關節剛度;對角矩陣J∈Rn×n為電機慣量矩陣;u為控制器輸出向量。
性質1 慣性矩陣M(q)為對稱正定矩陣,即滿足
性質2 矩陣M·(q)-2C(q,q·)為反對稱矩陣,即對于任意向量ξ 滿足
ξT[M·(q)-2C(q,q·)]ξ=0。(4)
柔性關節機械臂的軌跡跟蹤控制問題即初始狀態下設計控制律u使q(t)-qd(t)的值快速收斂至0,實現機械臂在關節空間的軌跡跟蹤,其中qd(t)為連桿角位移q(t)的給定參考角度。
2 二時間尺度分解
首先利用奇異攝動法進行模型解耦,由于機械臂動力學模型中關節剛度矩陣K的元素遠遠大于模型中其他矩陣的元素,令K-=ε2K,其中ε為奇異攝動參數且滿足0lt;εlt;1,定義μ=K(θ-q),則式(1)~式(2)可以寫成奇異攝動形式為:
M(q)q··+C(q,q·)q·+g(q)=μ+d1;(5)
ε2Jμ··+K-μ=K-(u+d2-Jq··)。(6)
式中:q為慢變量;μ為快變量。令ε=0,此時原系統被降階成為慢子系統,原系統中的控制輸入u變化成為慢子系統控制輸入us。 μ的近似值即快變量的準穩態為
μ-=us+d2-Jq··。(7)
將式(7)代入式(5)中可得到解耦后的慢子系統為
[M(q)+J]q··+C(q,q·)q·+g(q)=us+d1+d2。(8)
定義向量y為μ的準穩態μ-的偏差,即y=μ-μ-,將其代入式(6)可得關于y的方程為
ε2J(y··+μ-··)=-K-y+K-uf。(9)
其中uf=u-us,引入新的時間尺度變量τ并令dτ/dt=1/ε,則式(9)在快時間尺度下可以寫為
Jd2ydτ2+Jd2μ-dτ2=-K-y+K-uf。(10)
在τ時間尺度下,準穩態μ-變化緩慢可視為常數,可令d2μ-/dτ2=0,則式(10)可重新寫為
d2ydτ2+J-1K-y=J-1K-uf。(11)
至此得到兩個二階子系統,其運動方程分別為式(8)和式(11),原系統的控制律為兩個子系統控制律之和,即μ=μs+μf,通過對μs和μf分別設計,使原系統的復合控制律僅需連桿角位移和速度反饋成為可能。
3 控制系統設計
控制系統框圖如圖1所示。
3.1 慢子系統設計
利用奇異攝動法已得到慢子系統式(8),該子系統的控制器設計目標為使q與參考角度qd的偏差e=q-qd快速收斂至0。令系統的總擾動d=d1+d2,D(q)=M(q)+J,慢子系統可重新寫為
D(q)q··+C(q,q·)q·+g(q)=us+d。(12)
擾動的存在將影響軌跡跟蹤性能,為了提高控制系統抗擾動能力,首先設計擾動觀測器得到復合擾動的估計值并將其應用于控制律中補償原擾動,觀測器設計為:
式中:ω為輔助變量;d^為擾動d的估計值;N為待設計的常數可逆正定矩陣。
定理1 假設擾動的變化速率與式(13)中其他變量相比可忽略不計,令d·=0,擾動估計值d^可收斂至d的充分條件為N滿足矩陣不等式
N+NT-NTD·(q)N≥0。(14)
注:對于任意矩陣A,A≥0指矩陣A為半正定矩陣。
證明:由式(13)對擾動估計值d^求導得
令擾動觀測偏差d~=d^-d,由于假設d·=0,所以有d^·=d~·,代入式(15)可得
d~·=-N-1D-1(q)d~。(16)
定義Lyapunov函數為
Vd=d~TNTD(q)Nd~=(Nd~)TD(q)(Nd~)。(17)
由于D(q)=M(q)+J且M(q)和J均為對稱正定矩陣,所以D(q)也為正定矩陣,有Vd≥0。
對Vd求導得
由式(18)可得,當N+NT-NTD·(q)N≥0時,有V·d≤0,進而得到擾動觀測值d^可收斂至機械臂慢子系統的實際擾動d,證畢。
對慢子系統設計復合控制律us=us1+us2,利用擾動觀測值d^和機械臂參考角度軌跡qd以及實際的連桿角位移q設計us1為
us1=D(q)q··d+C(q,q·)q·d-d^。(19)
式中d~可視為補償后新的擾動信號。將其代入式(12)可得到以軌跡跟蹤偏差為狀態變量的運動方程為
D(q)e··+C(q,q·)e·+g(q)+d~=us2。(20)
對于向量a=[a1 a2 … an]T∈Rn和常數b,定義ab=[ab1 ab2 … abn]T,為了使系統穩定且具有較強的魯棒性,定義系統式(19)的評價信號為
η=e·+αe+βem/n。(21)
式中:矩陣α=diag[α1,α2,…,αi,…,αn],αigt;0;矩陣β=diag[β1,β2,…,βi,…,βn],βigt;0;m和n均為正奇數,且ngt;m。則當設計控制律使‖η‖收斂至0時,偏差‖e‖也在有限時間內快速收斂至0。
在d~存在的情況下,‖η‖的值越小意味著系統的抗擾動能力越強,定義魯棒性能指標信號為
σ=sup‖d~‖≠0‖η‖2‖d~‖2。(22)
式中‖η‖2=(∫∞0ηTηdt)0.5。
引理1 (Hamilton-Jacobi-Issacs不等式理論[23])對于任意小的正數χ,式(22)中的魯棒性能指標σ≤χ的充分條件為存在光滑函數V≥0滿足
V·≤12χ2‖d~‖2-12‖η‖2。(23)
慢子系統復合控制律中的us2設計為
us2=-Dαe·-Cαe+g(q)-(12χ2+12)η-
mnDβdiag(em/n-1i)e·-Cβem/n。(24)
定理2 當系統式(20)中的控制律us2為式(24)時,該系統定義為式(22)的魯棒性能指標σ可以小于等于任意正數λ。
證明:對評價信號式(21)求導得
η·=e··+αe·+mnβdiag(em/n-1i)e·。(25)
同時代入式(20)可得
將式(24)的控制律代入可得
Dη·=-Cη-d~-(12χ2+12)η。(27)
定義函數V為
V=12ηTDη。(28)
對其求導得
V·=12η·TDη+12ηTD·η+12ηTDη·=ηTDη·+
12ηTD·η=ηT(-12χ2η-12η-d~)+
12ηT(D·-2C)η。(29)
由于D=M+J,且矩陣J為常數矩陣,所以有D·=M·,根據柔性關節機械臂的性質2可得ηT(D·-2C)η=0,則式(29)可進一步化簡為
V·=-12χ2ηTη-12ηTη-ηTd~。(30)
令I=0.5χ2‖d~‖2-0.5‖η‖2,則可以得到
V·-I=-12χ2ηTη-12ηTη-ηTd~-12χ2‖d~‖2+
12‖η‖2=-12(1χ2ηTη+2ηTd~+
χ2‖d~‖2)=-121χη+χd~2。(31)
由上式可得V·-I≤0,即V·≤0.5χ2‖d~‖2-0.5‖η‖2。
根據引理1可知定理2得證。
3.2 快子系統設計
前文已利用奇異攝動法解耦得到快子系統方程為
d2ydτ2+J-1K-y=J-1K-uf。(32)
該系統為二階非線性無阻尼系統,在控制律uf 中加入阻尼項,設計控制律為
uf=-εK--1K1μ·=-K--1K1dμdτ。(33)
式中K1為對角正定系數矩陣。
在快子系統τ時間尺度下,準穩態μ-相對其他變量變化緩慢可視為常量且y=μ-μ-,控制律式(33)可重新寫為
uf=-K--1K1dydτ。(34)
將控制律代入式(32)可得
d2ydτ2+J-1K1dydτ+J-1K-y=0。(35)
定義Lyapunov函數為
Vf=12y′Ty′+12yTJ-1K-y。(36)
式中y′=dy/dτ,另外在快時間尺度下,慢變量q變化緩慢可視為常量,所以可令(M-1)′=0,對Lyapunov函數在時間尺度求導得
dVfdτ=12y″Ty′+12y′Ty″+12y′TJ-1K-y+
12yTJ-1K-y′+12yT(J-1K-)′y=y′Ty″+
y′TJ-1K-y=y′T(-J-1K-y-J-1K1y′)+
y′TJ-1K-y=-y′TJ-1K1y′。(37)
由于矩陣J-1、K1和M-1均為正定矩陣,所以有Vfgt;0,dVf/dτ≤0,當V′f≡0時,y′=0,根據Lasalle不變性定理[24],當選擇合適的增益時邊界層系統是穩定的,證畢。
連立式(19)、式(24)、式(34)可得復合控制器為
u=us+uf=D(q)q··d+C(q,q·)q·d-d^-
Dαe·-Cαe+g(q)-(12χ2+12)η-
mnDβdiag(em/n-1i)e·-Cβem/n-K--1K1εμ·。(38)
4 仿真分析
以圖2所示的雙連桿柔性關節機械臂作為被控對象進行計算機仿真分析。
動力學模型式(1)~式(2)中的參數矩陣分別為:
M(q)=n1+n2+2n3cosq2n2+n3cosq2n2+n3cosq2n2;
C(q,q·)=-n3q·2sinq2-n3(q·1+q·2)sinq2n3q·1sinq20;
G(q)=n4gcosq1+n5gcos(q1+q2)n5gcos(q1+q2)。
式中:q=[q1q2]T;n1=(m1+m2)l21;n2=m2l22;n3=m2l1l2;n4=(m1+m2)l1;n5=m2l2。機械臂固有參數的設置如表1所示,關節剛度矩陣和電機慣量矩陣分別為:
K=10 0000010 000;J=1.3001.3。
表1中連桿2的質量包括抓取物品的質量及連桿2的本身質量。首先設置所設計的控制器輸出u=us+uf中的參數,令奇異攝動參數ε=0.1,通過試錯法,得到準穩態系統所設計的控制律us中α=diag(3,3),β=diag(0.3,0.1),m=3,n=5,χ=0.035。在快子系統即邊界層系統中所設計的控制律uf中,K1=diag(100,570),系統的輸出即連桿的初始位置設定為q=[0 0]T。
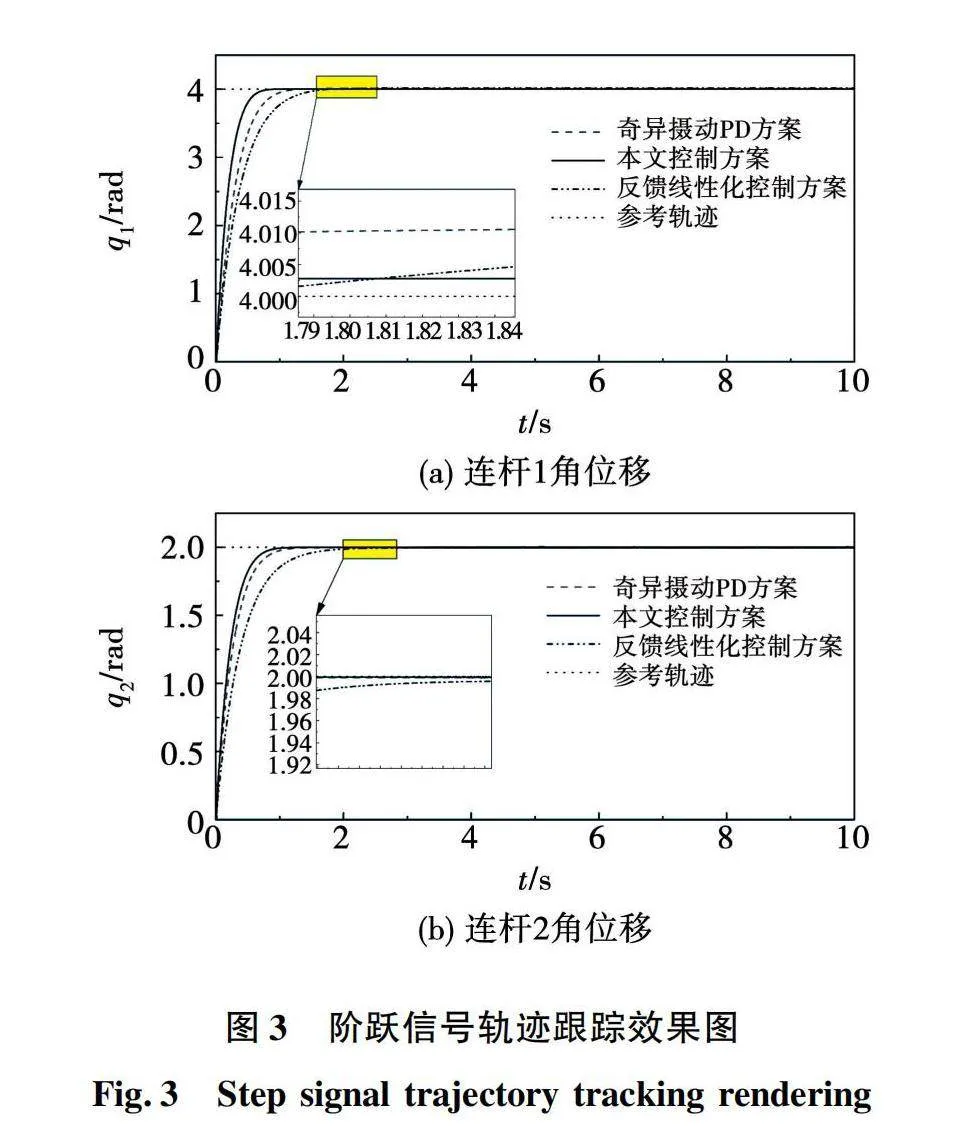
為了驗證所提控制方案在柔性關節機械臂的軌跡跟蹤控制中具有更好的效果,將奇異攝動PD控制器與反饋線性化控制方案參數調到最佳與所提出方案作對比。在忽略外界擾動的情況下,令連桿1和連桿2的參考軌跡都為階躍信號,兩連桿的軌跡跟蹤曲線如圖3所示。
為了更加直觀地比較兩種控制方案對雙連桿柔性關節機械臂的軌跡跟蹤性能,分別計算出3種控制方案的上升時間、調節時間,經計算后的實際值如表2所示。
由表2可知,相比傳統的奇異攝動PD控制方案與反饋線性化控制方案,所設計的奇異攝動魯棒控制方案上升時間和調節時間都明顯更小,具有更良好的瞬態性能,輸出角位移可以更快的跟蹤上參考軌跡。
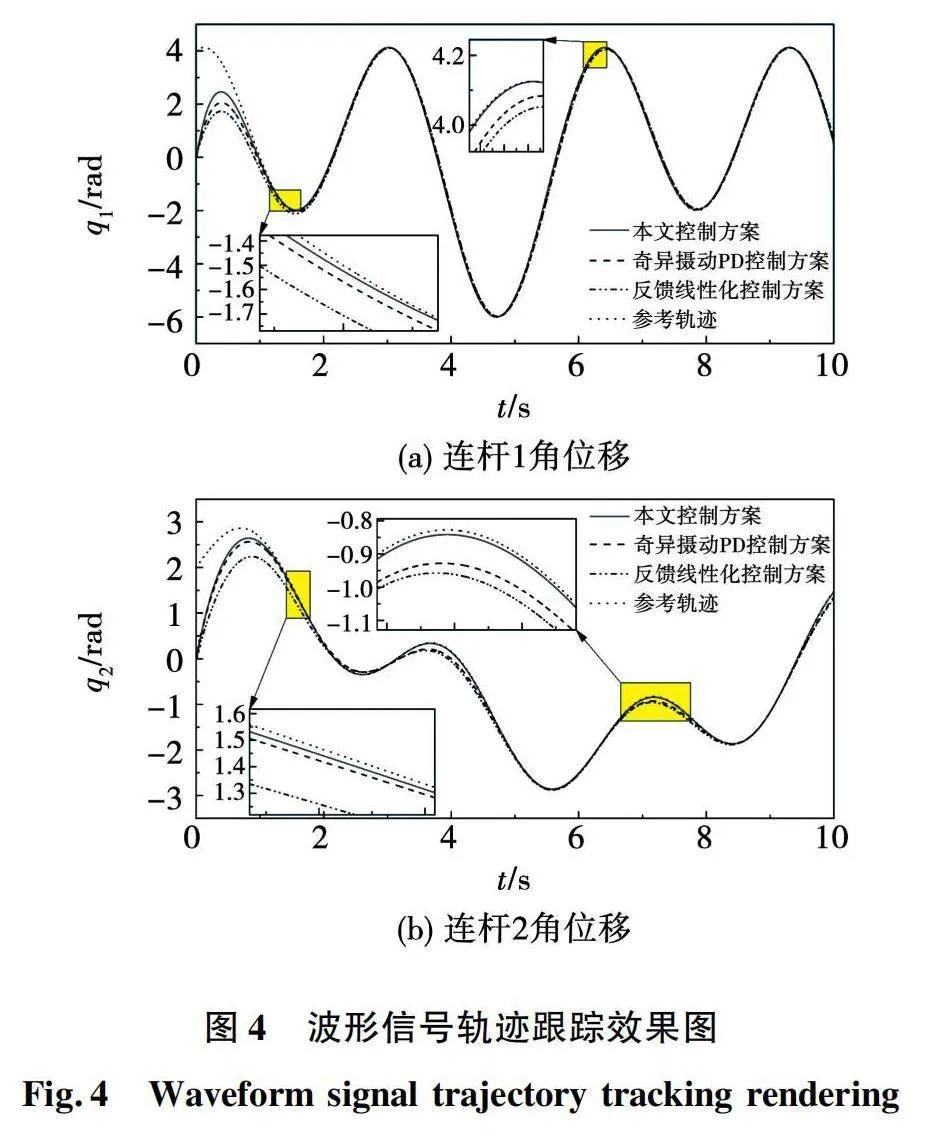
為了驗證所設計控制方案在控制系統中存在未知外界擾動的情況下,能夠克服擾動的影響并實現機械臂的軌跡跟蹤,加入擾動信號d1=[3+5q·1+10q1,3+5q·2+10q2],d2=[4+5q·1+10q1,4+5q·2+10q2],連桿1的參考軌跡為q1d=2sin(t)+4cos(2t),連桿2的參考軌跡為q2d=sin(2t)+2cos(0.5t),輸出即連桿的初始位置設定為q=[0 0]T。同時與奇異攝動PD控制方案及反饋線性化控制方案對比,雙連桿的軌跡跟蹤效果如圖4所示。
如圖4所示,與奇異攝動PD控制方案及反饋線性化控制方案相比,當加入擾動時,3種控制方案的跟蹤性能展現出差距,所設計的奇異攝動魯棒控制方案的軌跡跟蹤性能明顯優于其余兩種控制方案,暫態性能也就是連桿角位移由0上升到參考軌跡的速度也明顯快于奇異攝動PD控制方案與反饋線性化控制方案。
兩種控制方案的軌跡跟蹤誤差如圖5所示。
為了更直觀比較這3種具有抗擾動能力控制律的性能,計算出采用每一種控制律的系統在連桿1和連桿2的平均調整時間(輸出角位移上升并保持與參考軌跡角位移偏差小于0.15 rad的時間)和平均跟蹤誤差E,E的定義為
E=1N∑Ni=1(‖e(i)‖2)。(39)
式中N為采樣次數,取為100 000,兩種控制方案的性能指標對比如表3所示。
與奇異攝動PD控制方案及反饋線性化控制方案相比,所設計的魯棒控制方案由于設計了合適形式的評價信號,設計控制律時也依照較高的性能指標,保證了所設計控制律具有更快的收斂速度和更小的穩態誤差,具有較高的軌跡跟蹤精確度。
5 結 論
針對柔性關節機械臂受大干擾影響難以高精確度進行軌跡跟蹤的問題,提出一種奇異攝動魯棒控制方案,利用奇異攝動法將柔性關節機械臂控制系統解耦為兩個二階系統, 降低了設計難度, 減少了計算量。對慢子系統設計了二次補償控制律,設計干擾觀測器觀測干擾,對干擾進行首次補償;設計了基于Hamilton-Jacobi-Issacs不等式的魯棒控制律進行二次補償,并證明了當擾動有界時,擾動可以很快被補償,邊界層子系統加入阻尼控制量使其穩定, 并通過Lyapunov穩定性定理與Lasalle不變性定理證明了系統的穩定性。仿真分析結果表明,控制系統可以使雙連桿柔性關節機械臂有效跟蹤參考軌跡, 具有良好的跟蹤性能和抗干擾能力, 可以很好地適用于一些干擾巨大的工作環境。
參 考 文 獻:
[1]OZGOLI S, TAGHIRAD H D. A survey on the control of flexible joint robots[J]. Asian Journal of Control, 2006, 8(4): 332.
[2]GARCIA E, JIMENEZ M A, DE SANTOS P G, et al. The evolution of robotics research[J]. IEEE Robotics amp; Automation Magazine, 2007, 14(1): 90.
[3]KAGAYA K, PATEK S N. Feed-forward motor control of ultrafast, ballistic movements[J]. Journal of Experimental Biology, 2016, 219(3): 319.
[4]秦化淑,李樹榮,程代展.剛性機械臂跟蹤控制的魯棒控制器設計[J].控制與決策, 1991, 1(1): 14.
QIN Huashu, LI Shurong, CHENG Daizhan. Design of robust controller for tracking control of rigid manipulator [J]. Control and Decision, 1991, 1(1): 14.
[5]AMBROSINO G, CELENTANO G, GAROFALO F. Robust model tracking control for a class of nonlinear plants[J]. IEEE Transactions on Automatic Control, 1985, 30(3): 275.
{6} SAYAHKARAJY M, MOHAMED Z, MOHD FAUDZI A A. Review of modelling and control of flexible-link manipulators[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2016, 230(8): 861.
[7]孟范偉,何朕,王廣雄,等.撓性系統的控制設計和H∞回路成形法[J]. 控制理論與用, 2013, 30(8): 1014.
MENG Fanwei, HE Zhen, WANG Guangxiong, et al. Control design of flexible systems and H∞ loop shaping method[J]. Control theory amp; Application, 2013, 30(8): 1014.
[8]SWEET L, GOOD M. Redefinition of the robot motion-control problem[J]. IEEE Control Systems Magazine, 1985, 5(3): 18.
[9]SPONG M W. Modeling and control of elastic joint robots[J].Mathematical and Computer Modelling,1989,12(7):912.
[10]KIM J. Two-time scale control of flexible joint robots with an improved slow model[J]. IEEE Transactions on Industrial Electronscs, 2017, 65(4): 3317.
[11]KIM M J, CHUNG W K. Disturbance-observer-based PD control of flexible joint robots for asymptotic convergence[J]. IEEE Transactions on Robotics, 2015, 31(6): 1508.
[12]HE W, YAN Z, SUN Y, et al. Neural-leaming-based control for a constrained robotic manipulator with flexible joints[J]. IEEE Transactions on Neural Ner-works amp; Leaning Systems, 2018, 29(12):5993.
[13]汪允鶴, 李宏勝, 張偉. 柔性關節機械臂的滑模變結構控制[J]. 組合機床與自動化加工技術, 2017(10): 91.
WANG Yunhe, LI Hongsheng, ZHANG Wei. Sliding mode variable structure control of flexible jointmanipulator [J]. Modular Machine Tools and Automatic Processing Technology, 2017(10): 91.
[14]李鵬飛, 張銀河, 張蕾, 等. 考慮誤差補償的柔性關節機械臂命令濾波反步控制[J].控制理論與應用,2020,37(8):24.
LI Pengfei, ZHANG Yinhe, ZHANG Lei, et al. Command filtering backstepping control of flexible joint manipulator considering error compensation[J]. Control Theory amp; Application, 2020, 37(8): 24.
[15]TADOLE S E, KOLHE J P, PHADKE S B. Extended-stale-observer-based control of flexible-joint system with experimental validaition[J]. IEEE Transactions on Inductrial Electronics, 2009, 57(4): 1411.
[16]劉福才, 閆莉莉, 秦利, 等. 變負載空間機械臂混沌運動分析與控制[J]. 電機與控制學報, 2019, 23(10):120.
LIU Fucai, YAN Lili, QIN Li, et al. Chaotic motion analysis and control of space manipulators with variable loads[J]. Electric Machines and Control, 2019, 23(10): 120.
[17]劉華山, 朱世強, 王宣銀. 扭矩輸入有界的機器人模糊PD軌跡跟蹤[J]. 電機與控制學報, 2010, 14(1): 78.
LIU Huashan, ZHU Shiqiang, WANG Xuanyin. Rajectory racking control for robot manipulators with bnounded torque inputs via fuzzy PD[J].Electric Machines and Control,2010,14(1):78.
[18]KHAH H K. GRIZZLE J W. Nonlinear systems upper saddle river[M]. Premtice Hall, 2002.
[19]劉福才,劉林, 徐智霸. 柔性關節空間機械臂奇異攝動模糊PID控制仿真研究[J]. 高技術通訊, 2019, 29(7): 661.
LIU Fucai, LIU Lin, XU Zhiba. Simulation study on singular perturbation fuzzy PID control of flexible joint space manipulator[J]. High Technology Communication, 2019, 29(7): 661.
[20]KIM J, CROFT E A. Full-state tracking control for flexible joint robots with singular perturbation techniques[J]. IEEE Transactions on Control Systems Technology, 2019, 27(1): 63.
[21]陳志勇, 陳力. 帶有柔性補償的柔性關節空間機囂人的增廣自適應控制及關節振動抑制[J]. 宇航學報, 2013, 34(12): 1599.
CHEN Zhiyong, CHEN Li. Augmented adaptive control and joint vibration suppression of flexible joint space robot with flexible compensation[J]. Astronautica Sinica, 2013, 34(12): 1599.
[22]常可可, 陳雷雷, 周若男, 等. 極端環境表面工程及其共性科學問題研究進展[J].中國機械工程,2022,33(12):1388.
CHANG Keke, CHEN Leilei, ZHOU Ruonan, et al. Research progress of extreme environment surface engineering and its common scientific problems[J].China Mechanical Engineering, 2022, 33(12): 1388.
[23]WANG Y N, SUN W, XIANG Y Q, et al. Neural network-based robust tracking control for robots[J]. Intelligent Automation and Soft Computing, 2009, 15(2): 211.
[24]ZHAO B, XIAN B. Nonlinear robust adaptive tracking control of a quadrotor UAV via immersionand invariance methodology[J]. IEEE Transactions on Industrial Electronics,2015,62(5):2891.
(編輯:邱赫男)
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09