呼吸運動實驗模型的改進與數字化
2024-12-16 00:00:00張磊
中國科技教育 2024年11期














呼吸運動實驗模型,是人教版《生物學》七年級下冊第三章第二節“發生在肺內的氣體交換”中的一個演示實驗,是實際教學中的一個難點,尤其是肺與外界氣體交換的原理比較抽象,學生在理解上有一定的難度。通過呼吸運動實驗模型,可以幫助學生更好地理解肺內的情況,相對容易地掌握相關概念。結合中學生物實際教學、備課組教研活動、調查問卷和文獻綜述等反饋,原課堂教學模型結構較為簡單,不能簡單明了地展現肺內呼吸過程的復雜變化,學生難以理解呼吸過程中的生物學本質,影響了教學的實際效果。因此,在《義務教育生物學課程標準(2022 年版)》的指導下,教師和學生共同將初中生物學知識與其他學科相融合,通過跨學科實踐,解決真實情境中遇到的教學問題。
模型改造技術路徑
起始階段
學生使用3D 軟件設計肋骨和氣管3D 圖形;使用3D 打印機根據設計圖打印肋骨和氣管模型。
材料準備階段
準備所需材料,包括3D 肋骨模型、玻璃罩、液壓推桿電機、壓強傳感器、亞克力箱、自制膈肌模型等。
零件設計制作
學生繪制出設計好的零件草圖,并標明零件大小,請廠家用亞克力板作為材料雕刻出所需零件。學生對細節進行打磨,制作出可以牽拉肋骨的裝置,并對打印出的肋骨模型進行重構和調整,比如鋸開肋骨模型,連上一節彈性好的橡膠材料,模擬肋軟骨的作用。
系統集成
運用Python 語言編程,對液壓推桿電機、流水指示燈及語音控制等功能進行系統化集成;使用壓強傳感器和呼吸率傳感器將抽象的氣壓變化以圖形方式進行可視化展現。
安裝傳感器
安裝壓強傳感器和呼吸率傳感器,以監測和顯示實驗過程中的氣壓變化。
實驗測試
進行實驗測試,確保所有系統和傳感器正常工作,并對實驗結果進行驗證。
模型創新改進過程
呼吸運動模型制作經歷了3 代模型2 次改造升級。本實驗利用3D打印技術打印的肋骨模型和氣管模型讓實驗更加逼真,也更貼近呼吸時器官的結構變化(圖1)。
本實驗的設計主要運用了生物學中人體呼吸的生理結構特點,同時也融合了材料設計、智能化技術、3D 打印技術和物理學中氣壓變化及力學知識,是對2022 年新課標中倡導的跨學科主題教學的一次嘗試。
創新改進方案
材料準備
3D 肋骨模型、玻璃罩、液壓推桿電機、壓強傳感器、亞克力箱、自制膈肌模型(圖2);橡皮繃帶、口鼻咽喉模型、Y 型玻璃管、3D 打印氣管、橡膠塞、主控設備(ESP32開發板、降壓模塊、電機驅動器、12.6 V 鋰電池、WS2812 燈帶、語音芯片等)等,見圖3。
實驗模型制作方法
首先,學生配合信息課程教師利用3D One 軟件設計肋骨3D 圖形,繪制完成后運用3D 打印機打印出肋骨和氣管模型。在此過程中學生借助信息技術手段對實驗產生了實際的推動,為后續探究奠定了基礎。接下來是一些小零件的設計制作,學生先繪制出設計好的零件草圖(圖4),標明零件大小,再請廠家用亞克力板進行雕刻。零件到位后,根據材料和設計要求,再由學生對細節處進行打磨,比如打印出的肋骨模型材料比較堅硬,不具備良好的伸縮性,需要將肋骨鋸開連上一節彈性好的橡膠材料,這節橡膠管同時起到模擬肋軟骨的作用(圖5),使得裝置更貼近實際器官。通過設計和實踐改進方案,培養了學生的探究精神、嚴謹的求實態度,以及勇敢的質疑精神。
隨后,對器材進行拼裝與演示。拼裝過程中,膈肌自動推升裝置一開始采用的是學校STEM 創新社團學生組裝的升降機(圖6),后來發現其推升馬力遠遠達不到要求。在請教物理教師后,建議使用大推力的液壓裝置,最終在機電市場找到了最大可推升20 千克重物的液壓推桿電機(圖7),解決了實驗模型中膈肌自動升降的問題,很好地模擬了膈肌在實際情況中自主收縮的生理特點。
通過實驗,我們發現膈肌的上下移動會導致肺部、肋部,以及氣壓的顯著變化。然而,由于缺乏物理知識,很多學生無法深刻領悟這種變化,因此需要提高模型模擬的準確性,深入研究肺、膈等器官的結構特征。膈的實際形狀是向上凸起的。另外,胸膜的臟層與壁層間存有一個潛在的密閉胸膜腔,胎兒出生后,在平和呼吸時,胸內壓始終低于大氣壓,以大氣壓為零點,在檢壓計上可以讀出負值,故稱為胸內負壓。
綜上,可以設計出一種模仿呼吸運動與膈運動關系的模型,需要解決的兩個要點為:①讓自然狀態下的橡皮膜稍向瓶內突起;②讓瓶內(由瓶內壁、橡皮膜和氣球等圍成的內空隙,可認為是胸膜腔)處于負壓狀況,并保證其氣密性。第1 種方法是先將橡皮膜邊緣扎緊,然后將液壓推桿電機調節到橡皮膜向瓶內頂起,再用橡皮塞封口,并保證氣密性;第2 種方法是先將橡皮膜邊緣扎緊,然后將配好的氣球稍微吹大一些,再用橡皮塞封口,并保證氣密性。
通過上述方法,均可讓瓶內處于負壓狀態。再通過壓強傳感器將肺內氣壓的變化以數字化的方式直觀地呈現在學生面前,幫助學生理解氣壓差在呼吸中的重要作用。圖8 為多次演示過程中的一張氣壓變化比較均勻的曲線圖,可以明顯看到在呼氣和吸氣時胸腔內氣壓變化的往復過程。
最后一步是電路設計和程序開發過程。電路部分采用高性能的ESP32 微控制器作為主控芯片,負責整個系統的邏輯控制。通過控制L298N 電機驅動器,實現對電機的精確驅動,實現正反轉,進而控制液壓推桿的伸縮運動。此外, 利用WS2812 燈帶實現呼吸方向流水燈效果,增強演示的視覺效果。
為了接收外部信號,電路部分還設計了按鍵模塊和語音識別芯片。按鍵模塊用于手動控制演示,而語音識別芯片通過連接麥克風和揚聲器,實現了語音控制功能。電源部分采用1 組3S 鋰電池,通過降壓模塊將電壓降至5 V,為ESP32 和其他電子部件供電。
編程部分使用MicroPython 為ESP32 編寫程序,主要包括4 個方面:①流水燈,通過控制WS2812 燈帶的亮度變化,實現呼吸方向流水燈效果;②驅動電機邏輯,通過控制L298N電機驅動器的2 個引腳,實現電機的正反轉;③軟串口接收來自語音識別芯片的命令,將語音識別結果轉化為控制信號;④接收按鍵模塊信號,實現手動控制。
為了滿足隨時切換演示、終止演示的需求,我們在程序設計中采用了多線程控制輸入信號,使得系統能夠隨時響應控制命令,切換演示模式。整個自動化演示系統共設計了4 種模式:停止循環、呼吸循環、單吸氣動作和單呼氣動作,通過程序控制,實現演示內容多樣化。
模型測試
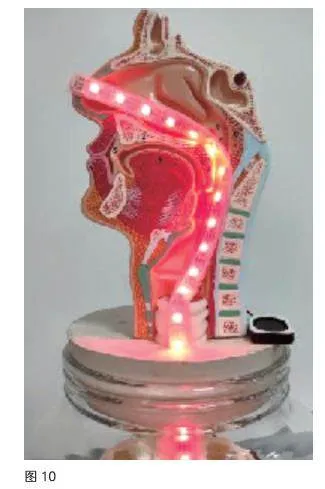
使用Python 語言進行智能化編程,實現液壓推桿電機、流水指示燈及語音控制等功能系統化集成。綠色指示燈表示吸氣(圖9),紅色指示燈表示呼氣(圖10)。
將壓強傳感器與呼吸率傳感器相結合,實現肺內氣壓變化與胸廓變化的實時圖形對比,肺內氣壓變化與胸廓變化呈現相反的趨勢(圖11)。
實驗結論
常用模型中無法實現的肋骨、氣壓和肺泡的變化均可呈現出來,力爭做到讓學生更加清晰明了地看到呼吸發生時各個組織器官的變化(表1)。
效果評價
教師采用多種教學方式,包括體驗式教學法、模型教學法和啟發式教學,引導學生進行模型制作,使得實驗效果更加顯著;通過對原始實驗教具的創新,開發出一種全新的呼吸運動模擬設備,可以直接展示出人體呼吸運動的復雜機理,極大地增強了學生的學習熱情,提升了課堂學習效率。在本次實驗模型創新過程中,學生學會了使用跨學科整合的思路解決問題,通過模擬實驗探究本質,在實驗探究方面的能力得到了鍛煉和提高。改進后的實驗模型與教材中的實驗模型原理一致,但更便于學生對呼吸運動的理解,以及對知識點的掌握,可在中學生物學課堂教學中推廣。
該項目獲得第38 屆全國青少年科技創新大賽科技輔導員科技教育創新成果一等獎