雙轉(zhuǎn)軸支撐裝置的運(yùn)動(dòng)學(xué)分析與誤差補(bǔ)償
2024-12-28 00:00:00徐志祥邢立冬孫文博趙炎高東
機(jī)械制造與自動(dòng)化 2024年6期


摘要:風(fēng)洞試驗(yàn)是飛行器研制發(fā)展過程中不可缺少的環(huán)節(jié),雙轉(zhuǎn)軸支撐裝置是應(yīng)用于風(fēng)洞采集飛行器實(shí)驗(yàn)數(shù)據(jù)的關(guān)鍵設(shè)備。根據(jù)雙轉(zhuǎn)軸支撐裝置的結(jié)構(gòu)特點(diǎn),建立風(fēng)洞試驗(yàn)用雙轉(zhuǎn)軸支撐裝置運(yùn)動(dòng)控制的數(shù)學(xué)模型,得到機(jī)構(gòu)角和飛行器模型角的運(yùn)動(dòng)學(xué)解析函數(shù)。在Matlab平臺(tái)上采用數(shù)據(jù)擬合的方法得到尾軸和滾轉(zhuǎn)角的誤差補(bǔ)償函數(shù),據(jù)此設(shè)計(jì)尾軸和滾轉(zhuǎn)角的誤差補(bǔ)償方案。
關(guān)鍵詞: 風(fēng)洞試驗(yàn);雙轉(zhuǎn)軸機(jī)構(gòu);運(yùn)動(dòng)解耦;誤差補(bǔ)償
中圖分類號(hào):TH113文獻(xiàn)標(biāo)志碼:A文章編號(hào):1671-5276(2024)06-0037-05
Abstract:Wind tunnel test is an indispensable link in the process of aircraft research and development, and the double rotating shaft support device is the key equipment used in wind tunnel to collect aircraft experimental data. This paper establishes the mathematical model of the motion control of the double-rotating shaft support device used in wind tunnel test according to the structural characteristics of the double-rotating shaft support device, and obtains the kinematic analytic functions of the mechanism angle and the aircraft model angle. The error compensation function of stern shaft and roll angle is obtained by data fitting method on Matlab platform, according to which, the error compensation scheme of stern shaft and roll angle is designed.
Keywords:wind tunnel test; double rotating shaft mechanism; motion decoupling; error compensation
0引言
風(fēng)洞試驗(yàn)是研究飛行器模型空氣動(dòng)力學(xué)的必要環(huán)節(jié),飛行器模型通過模型支撐機(jī)構(gòu)的精確運(yùn)動(dòng)控制,測(cè)得不同姿態(tài)下的氣動(dòng)特性參數(shù),為飛行器的研制成功提供重要保障[1-2]。雙轉(zhuǎn)軸支撐裝置是應(yīng)用于航空、航天等領(lǐng)域進(jìn)行實(shí)物仿真的關(guān)鍵硬件設(shè)備,在低速增壓風(fēng)洞試驗(yàn)中得到了廣泛應(yīng)用[3]。在風(fēng)洞試驗(yàn)中,雙轉(zhuǎn)軸支撐裝置用以支撐試驗(yàn)?zāi)P停ㄟ^支撐機(jī)構(gòu)3個(gè)軸的運(yùn)動(dòng)耦合,實(shí)現(xiàn)飛行器模型在空中不同姿態(tài)的變化,以獲得重要的試驗(yàn)數(shù)據(jù)[4]。本文通過簡(jiǎn)化雙轉(zhuǎn)軸支撐裝置的機(jī)械結(jié)構(gòu),采用空間幾何的方法,實(shí)現(xiàn)彎刀驅(qū)動(dòng)裝置、主軸驅(qū)動(dòng)裝置、尾軸驅(qū)動(dòng)裝置與飛行器模型姿態(tài)的運(yùn)動(dòng)學(xué)解析。雙轉(zhuǎn)軸支撐機(jī)構(gòu)的控制精度關(guān)系到風(fēng)洞試驗(yàn)數(shù)據(jù)的準(zhǔn)確性和可靠性,精準(zhǔn)的風(fēng)洞試驗(yàn)數(shù)據(jù)是建立復(fù)雜流場(chǎng)模型、驗(yàn)證計(jì)算方法的直接依據(jù)[5-6]。本文通過高精度水平測(cè)量?jī)x測(cè)量得到尾軸和滾轉(zhuǎn)角的運(yùn)行角度數(shù)據(jù)后,基于Matlab平臺(tái)提出誤差補(bǔ)償方案,實(shí)現(xiàn)尾軸和滾轉(zhuǎn)角精度的提高。
1支撐裝置的運(yùn)動(dòng)學(xué)分析
1.1模型角和機(jī)構(gòu)角的定義
雙轉(zhuǎn)軸模型支撐裝置如圖1所示。該裝置一共有3個(gè)運(yùn)動(dòng)軸,分別是彎刀軸、主軸、尾軸。在風(fēng)洞試驗(yàn)中飛行器模型軸線與尾軸軸線重合,故尾軸軸線與地面的夾角即為飛行器模型的仰角,尾軸軸線向水平地面的投影與鉛錘面的夾角即為模型的偏航角,模型繞自身軸線旋轉(zhuǎn)的角度即為模型的滾轉(zhuǎn)角。規(guī)定飛行器模型抬頭,仰角α為正,模型右偏,偏航角β為正,模型順時(shí)針方向旋轉(zhuǎn),滾轉(zhuǎn)角γ為正。彎刀向上旋轉(zhuǎn)為正,主軸和尾軸的旋轉(zhuǎn)方向以順時(shí)針為正。
1.2支撐裝置運(yùn)動(dòng)解析
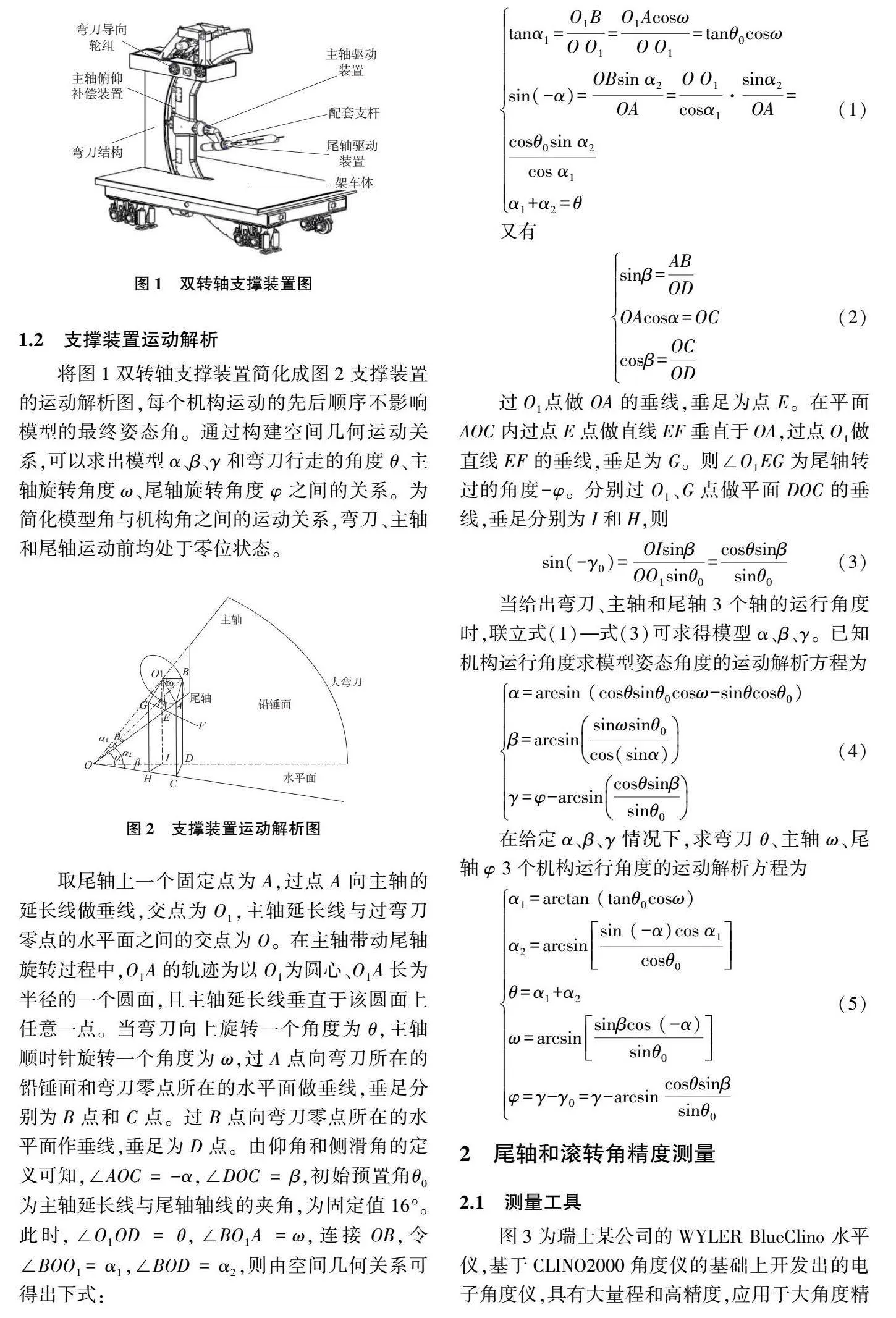
將圖1雙轉(zhuǎn)軸支撐裝置簡(jiǎn)化成圖2支撐裝置的運(yùn)動(dòng)解析圖,每個(gè)機(jī)構(gòu)運(yùn)動(dòng)的先后順序不影響模型的最終姿態(tài)角。通過構(gòu)建空間幾何運(yùn)動(dòng)關(guān)系,可以求出模型α、β、γ和彎刀行走的角度θ、主軸旋轉(zhuǎn)角度ω、尾軸旋轉(zhuǎn)角度φ之間的關(guān)系。為簡(jiǎn)化模型角與機(jī)構(gòu)角之間的運(yùn)動(dòng)關(guān)系,彎刀、主軸和尾軸運(yùn)動(dòng)前均處于零位狀態(tài)。
取尾軸上一個(gè)固定點(diǎn)為A,過點(diǎn)A向主軸的延長(zhǎng)線做垂線,交點(diǎn)為O1,主軸延長(zhǎng)線與過彎刀零點(diǎn)的水平面之間的交點(diǎn)為O。在主軸帶動(dòng)尾軸旋轉(zhuǎn)過程中,O1A的軌跡為以O(shè)1為圓心、O1A長(zhǎng)為半徑的一個(gè)圓面,且主軸延長(zhǎng)線垂直于該圓面上任意一點(diǎn)。當(dāng)彎刀向上旋轉(zhuǎn)一個(gè)角度為θ,主軸順時(shí)針旋轉(zhuǎn)一個(gè)角度為ω,過A點(diǎn)向彎刀所在的鉛錘面和彎刀零點(diǎn)所在的水平面做垂線,垂足分別為B點(diǎn)和C點(diǎn)。過B點(diǎn)向彎刀零點(diǎn)所在的水平面作垂線,垂足為D點(diǎn)。由仰角和側(cè)滑角的定義可知,∠AOC = -α,∠DOC = β,初始預(yù)置角θ0為主軸延長(zhǎng)線與尾軸軸線的夾角,為固定值16°。此時(shí),∠O1OD = θ,∠BO1A =ω,連接OB,令∠BOO1 = α1,∠BOD = α2 ,則由空間幾何關(guān)系可得出下式:
過O1點(diǎn)做OA的垂線,垂足為點(diǎn)E。在平面AOC內(nèi)過點(diǎn)E點(diǎn)做直線EF垂直于OA,過點(diǎn)O1做直線EF的垂線,垂足為G。則∠O1EG為尾軸轉(zhuǎn)過的角度-φ。分別過O1、G點(diǎn)做平面DOC的垂線,垂足分別為I和H,則
當(dāng)給出彎刀、主軸和尾軸3個(gè)軸的運(yùn)行角度時(shí),聯(lián)立式(1)—式(3)可求得模型α、β、γ。已知機(jī)構(gòu)運(yùn)行角度求模型姿態(tài)角度的運(yùn)動(dòng)解析方程為
在給定α、β、γ情況下,求彎刀θ、主軸ω、尾軸φ 3個(gè)機(jī)構(gòu)運(yùn)行角度的運(yùn)動(dòng)解析方程為
2尾軸和滾轉(zhuǎn)角精度測(cè)量
2.1測(cè)量工具
圖3為瑞士某公司的WYLER BlueClino 水平儀,基于CLINO2000角度儀的基礎(chǔ)上開發(fā)出的電子角度儀,具有大量程和高精度,應(yīng)用于大角度精密測(cè)量。
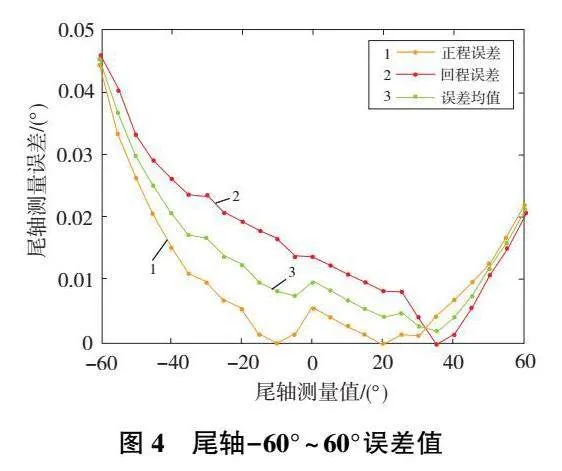
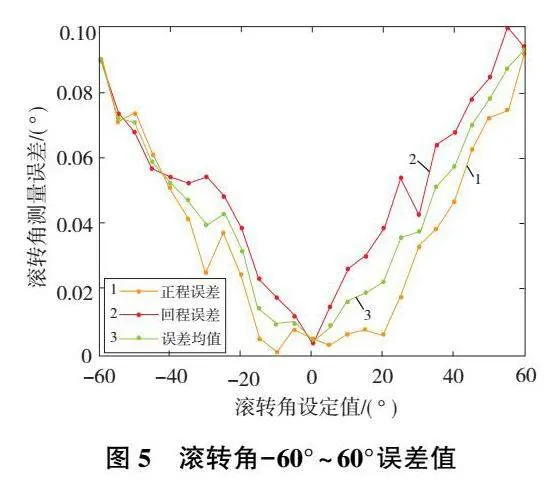
2.2測(cè)量數(shù)據(jù)分析
通過水平儀測(cè)量尾軸和滾轉(zhuǎn)角的誤差與其測(cè)量值的圖像如圖4和圖5所示。可得尾軸最大誤差為0.045 8°,滾轉(zhuǎn)角最大誤差為0.1°。
3誤差補(bǔ)償原理分析
3.1尾軸單軸補(bǔ)償原理分析
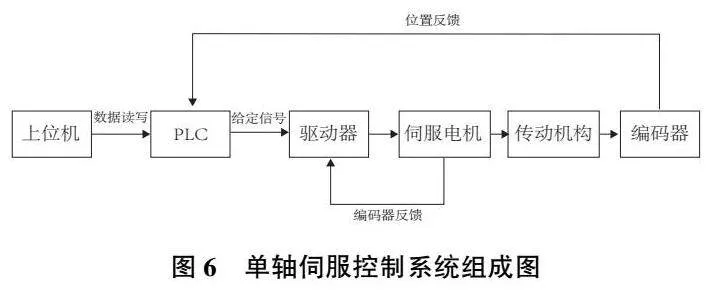
由于雙轉(zhuǎn)軸支撐機(jī)構(gòu)對(duì)單軸的運(yùn)動(dòng)精度要求較高,彎刀、主軸、尾軸的伺服控制系統(tǒng)均采用全閉環(huán)控制結(jié)構(gòu),其控制結(jié)構(gòu)如圖6所示。減速傳動(dòng)機(jī)構(gòu)輸出軸上的編碼器將實(shí)時(shí)位置信息反饋至PLC位置工藝模塊,位置控制器根據(jù)給定目標(biāo)位置信息與反饋位置信息比較輸出對(duì)應(yīng)的位置控制指令,形成位置控制環(huán)。整個(gè)系統(tǒng)以位置反饋為主反饋,系統(tǒng)內(nèi)部還存在速度反饋和電流反饋調(diào)節(jié),可以精確地控制伺服電機(jī)運(yùn)動(dòng),實(shí)現(xiàn)系統(tǒng)的全閉環(huán)控制。利用全閉環(huán)位置控制結(jié)構(gòu),可消除中間環(huán)節(jié)誤差,獲得較為理想的定位精度。
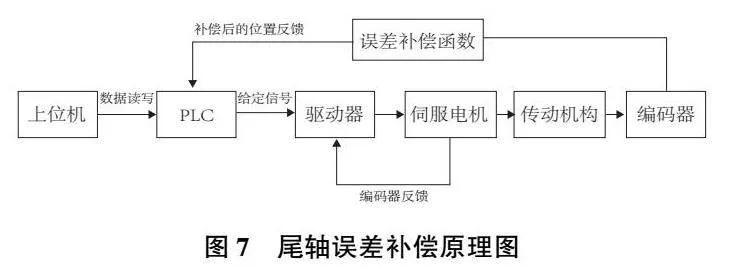
通過水平儀測(cè)量得到尾軸實(shí)際的運(yùn)行角度和誤差值,若水平儀測(cè)得尾軸實(shí)際運(yùn)行角度小于設(shè)定的運(yùn)行角度,則需要將編碼器的位置反饋值減去對(duì)應(yīng)的誤差值,然后將修正后的位置值反饋給上位機(jī),即可完成尾軸實(shí)際運(yùn)行角度小于設(shè)定值的誤差補(bǔ)償。若水平儀測(cè)得尾軸實(shí)際運(yùn)行角度大于設(shè)定角度,則需要將編碼器的位置反饋值加上對(duì)應(yīng)的誤差值,將修正后的位置反饋給上位機(jī),即可完成尾軸實(shí)際運(yùn)行角度大于設(shè)定值的誤差補(bǔ)償。在Matlab平臺(tái)上繪制尾軸誤差值隨測(cè)量值變化的函數(shù)曲線,借助Matlab函數(shù)擬合工具箱擬合出尾軸的誤差函數(shù)曲線并得到測(cè)量值與誤差的函數(shù)關(guān)系式。誤差補(bǔ)償函數(shù)用于修正編碼器測(cè)得的位置反饋值,然后將修正后的實(shí)際運(yùn)行位置反饋給上位機(jī)的尾軸PID運(yùn)動(dòng)模塊,即完成尾軸的運(yùn)動(dòng)角度補(bǔ)償。圖7為尾軸誤差補(bǔ)償原理圖。
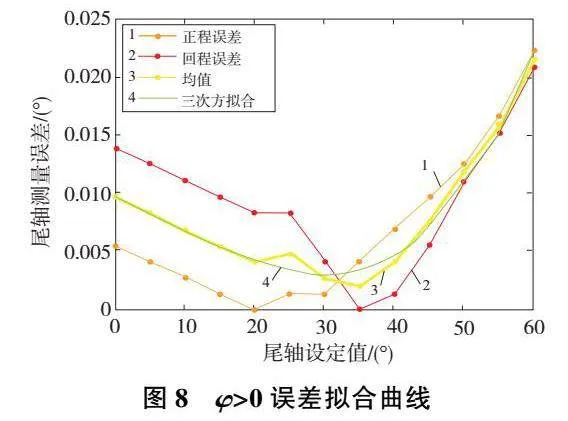
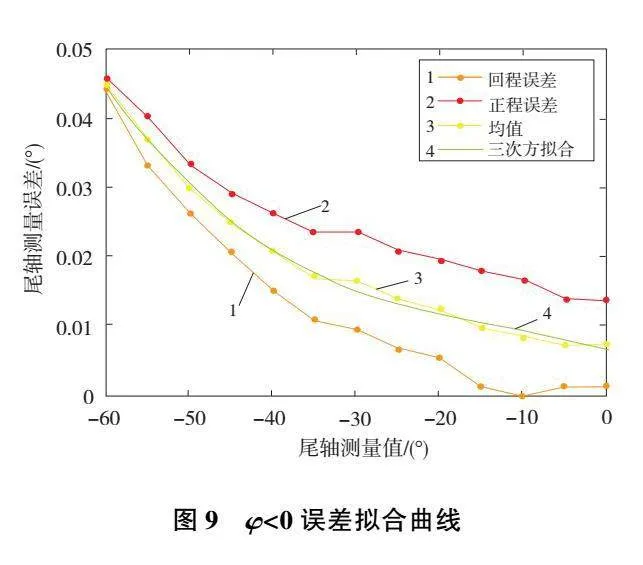
借助Matlab數(shù)據(jù)擬合函數(shù)工具箱可得一元三次誤差函數(shù),擬合曲線如圖8和圖9所示。
式中:y為尾軸誤差值;x為尾軸測(cè)量值。
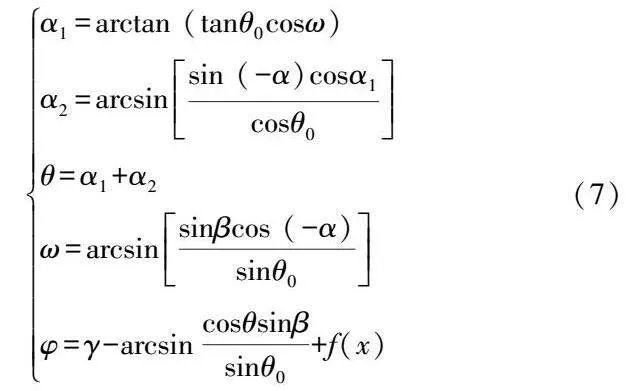
3.2滾轉(zhuǎn)角補(bǔ)償原理分析
上位機(jī)監(jiān)控軟件下達(dá)3軸運(yùn)動(dòng)指令后,指令通過 Profibus總線傳輸給PLC程序,PLC控制程序接收到速度和位置參數(shù)后將其傳送給指令讀取模塊,程序根據(jù)接收的參數(shù)計(jì)算出各個(gè)軸的運(yùn)動(dòng)速度以及位置,對(duì)其進(jìn)行位置、速度閉環(huán)控制,實(shí)現(xiàn)3軸同步運(yùn)行。飛行器模型的滾轉(zhuǎn)角受到彎刀、主軸、尾軸3個(gè)機(jī)構(gòu)角度的影響,其誤差值的大小也受到3個(gè)機(jī)構(gòu)角度精度的影響。通過式(4)可知:尾軸每增加或減小1°,滾轉(zhuǎn)角也相應(yīng)地增加或減小1°。在已知模型角度的情況下,通過修正公式(5)來完成滾轉(zhuǎn)角的誤差補(bǔ)償,式(7)為修正后模型的反解。
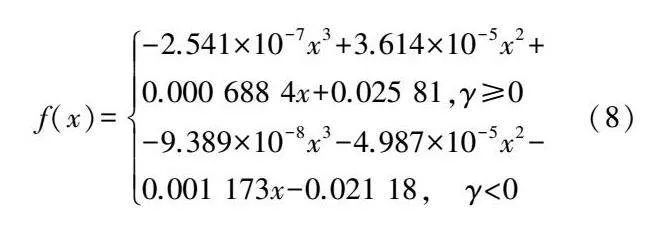
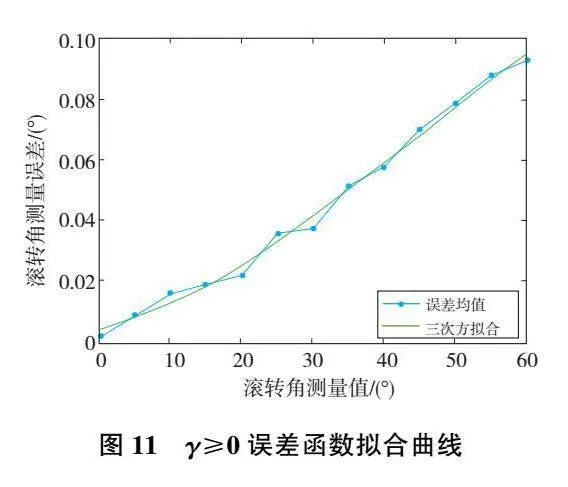
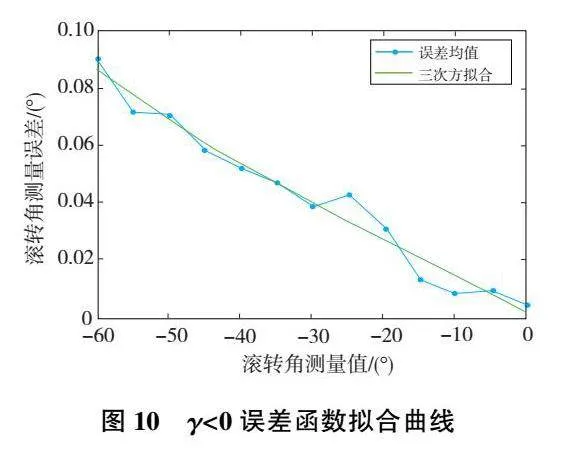
式中f(x)為滾轉(zhuǎn)角的誤差補(bǔ)償公式。通過Matlab數(shù)據(jù)擬合工具箱得到滾轉(zhuǎn)角設(shè)定值和誤差值的函數(shù)關(guān)系曲線,如圖10和圖11所示,并得到滾轉(zhuǎn)角誤差補(bǔ)償函數(shù)。
滾轉(zhuǎn)角的誤差補(bǔ)償函數(shù)為
4誤差補(bǔ)償效果分析
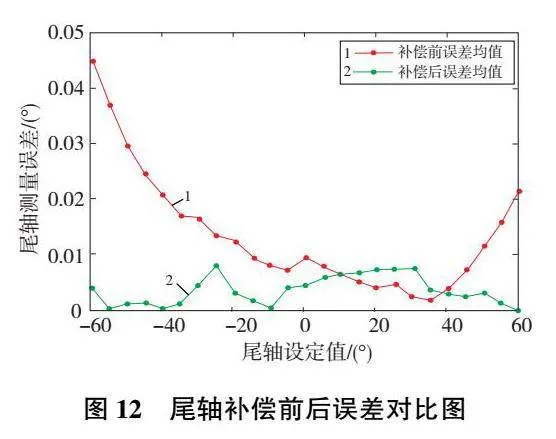
繪制尾軸誤差補(bǔ)償前后對(duì)比圖,通過圖12可知補(bǔ)償后尾軸的誤差精度得到了明顯的提升,尤其是在-60°~0°誤差補(bǔ)償效果較好。補(bǔ)償后尾軸整體的精度由2′45″提高到了35″,整體精度提升效果明顯。
通過圖13滾轉(zhuǎn)角補(bǔ)償前后誤差的對(duì)比圖可知,滾轉(zhuǎn)角精度提升效果顯著,補(bǔ)償后精度由原來的6′提高到了2′35″。隨著滾轉(zhuǎn)角設(shè)定值的增大,誤差補(bǔ)償效果越明顯,精度提高的倍數(shù)也越多。
5結(jié)語
本文建立了角度控制的數(shù)學(xué)模型,實(shí)現(xiàn)了雙轉(zhuǎn)軸模型支撐裝置的運(yùn)動(dòng)學(xué)解析。利用高精度水平儀測(cè)量得到尾軸和滾轉(zhuǎn)角的誤差精度,通過Matlab離散數(shù)據(jù)擬合的方法分別得到尾軸測(cè)量值與誤差值的誤差函數(shù)和滾轉(zhuǎn)角測(cè)量值與誤差值的誤差函數(shù)。尾軸誤差函數(shù)用于修正光柵編碼器的反饋值,滾轉(zhuǎn)角誤差函數(shù)用于修正滾轉(zhuǎn)角的運(yùn)動(dòng)學(xué)解析公式。誤差補(bǔ)償后的數(shù)據(jù)表明:尾軸單軸精度可以由初始的2′45″提高到35″,精度提高了3倍以上;滾轉(zhuǎn)角精度可以由初始的6′提高到2′35″,精度提高了1倍以上,滿足了風(fēng)洞試驗(yàn)中的精度要求。
參考文獻(xiàn):
[1] 王帆,施洪昌,蓋文,等. 風(fēng)洞測(cè)控技術(shù)[M]. 北京:國(guó)防工業(yè)出版社,2019.
[2] 李連福. 雙轉(zhuǎn)軸模型支撐裝置控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)[D]. 大連:大連理工大學(xué),2021.
[3] 李強(qiáng),李周復(fù),高小榮. FL-9低速增壓風(fēng)洞支撐機(jī)構(gòu)設(shè)計(jì)研究[J]. 機(jī)械傳動(dòng),2008,32(1):15-17,19.
[4] 劉念,王帆,褚衛(wèi)華,等. 風(fēng)洞模型支撐裝置驅(qū)動(dòng)油缸位置和速度的精確控制研究[J]. 機(jī)床與液壓,2014,42(1):86-90,119.
[5] 惲起麟. 風(fēng)洞實(shí)驗(yàn)數(shù)據(jù)的誤差與修正[M]. 北京:國(guó)防工業(yè)出版社,1996.
[6] 蔣甲利,張孝棣,賈元?jiǎng)伲? 模型角度測(cè)量誤差對(duì)阻力系數(shù)誤差的影響[C]// 探索創(chuàng)新交流--中國(guó)航空學(xué)會(huì)青年科技論壇文集. 銀川:[s.n.],2004:546-550.
收稿日期:20230317
基金項(xiàng)目:中國(guó)航空工業(yè)空氣動(dòng)力研究院項(xiàng)目
第一作者簡(jiǎn)介:徐志祥(1965—),男,江西豐城人,教授,碩士,研究方向?yàn)闄C(jī)電自動(dòng)化,zxxu@dlut.edu.cn。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.007

- 機(jī)械制造與自動(dòng)化的其它文章
- 基于增強(qiáng)稀疏分解的發(fā)動(dòng)機(jī)葉片監(jiān)測(cè)振動(dòng)辨識(shí)
- 一種機(jī)場(chǎng)異物探測(cè)的伺服轉(zhuǎn)臺(tái)設(shè)計(jì)
- 基于T-S模糊故障樹的液壓旋挖鉆機(jī)緩沖平衡閥故障診斷方法
- IDC安防巡檢機(jī)器人網(wǎng)絡(luò)監(jiān)控告警系統(tǒng)設(shè)計(jì)
- 基于力矩負(fù)反饋的柔性關(guān)節(jié)機(jī)器人自適應(yīng)分層滑模控制方法
- 基于PID參數(shù)優(yōu)化的機(jī)械臂末端異常振動(dòng)控制