基于足底壓力信息的數據采集系統設計
2024-12-28 00:00:00余珂欣李宏凱
機械制造與自動化 2024年6期
關鍵詞:數據采集



摘要:步態識別對于航天醫療康復和助老防摔領域研究具有積極作用,準確、規范的足底壓力信息是完成步態識別的基礎。通過設計足底壓力信息獲取系統,完成足底壓力數據的采集、處理等工作并實際應用。從相關器件選型、傳感器布局分析、硬件和軟件模塊等多方面進行考量,通過實驗驗證此系統的可行性和可靠性。
關鍵詞:步態信息;數據采集;壓力傳感器;信號處理;無線傳輸;嵌入式系統
中圖分類號:TP274文獻標志碼:B文章編號:1671-5276(2024)06-0138-04
Abstract:Gait recognition plays a positive role in aerospace medical rehabilitation and anti-fall aid for the elderly, and its accomplishment is based on accurate and standardized plantar pressure information. This paper designs a plantar pressure information acquisition system to complete the collection and processing of plantar pressure data and execute the practical application. Its feasibility and reliability are verified by experiments in terms of related device selection, sensor layout analysis, hardware and software modules.
Keywords:gait information; data acquisition; pressure sensors; signal processing; wireless transmission; embedded system
0引言
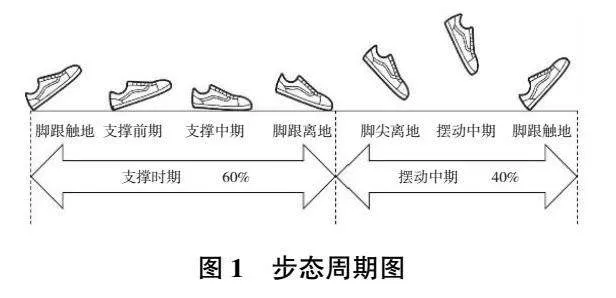
步態特征是指人習慣性走路或跑步的方式[1]。個體行走方式的不同,會導致足底所受壓力大小和變化的差異。行走過程中一個周期內的步態變化如圖1所示[2]。
走路過程中,至少有一只腿在支撐身體,另一只腿處于擺動期,以此保持身體的平衡。在一個步態周期[3]內,腳跟觸地是單腿支撐的開端,也標志著擺動末期的結束;腳尖離地是擺動初期的開始標志,也是單腿支撐的結束標志;腳前掌和腳趾逐漸受力的過程是處于單腿支撐的階段[4]。
1信息獲取系統
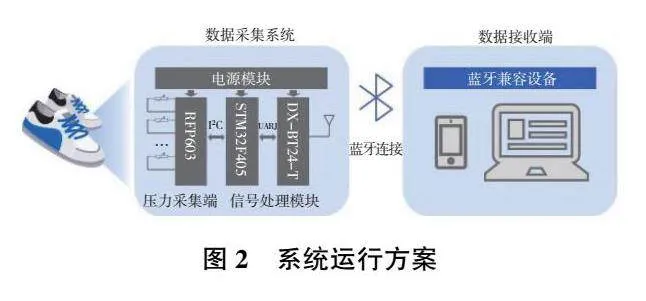
本節通過設計構建一套基于足底壓力信息的數據采集系統,完成足底壓力數據的采集和處理工作。系統硬件設計模塊綜合考慮了功耗、成本、體積等問題,確定采用STM32F405RGT6為主控器[5],用C語言編寫嵌入式[6]軟件程序,可實現數據收集和保存功能。系統運行方案如圖2所示。
1.1器件選型
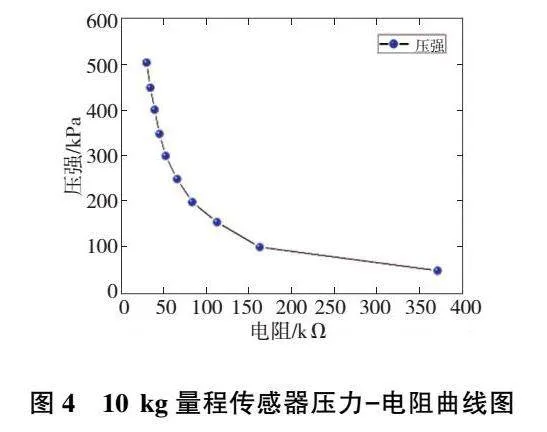
由于壓阻式壓力傳感器結構簡單,成本低,因此本文擬采用RFP603DW06GD型壓阻式壓力傳感器。一名志愿者模擬多種日常行為,當足底受到最大壓強時,10kg量程傳感器顯示電阻為60Ω,傳感器分壓0.004V,系統ADC獲取精度為0.001V。以上依據式(1)計算得出。
式中:V為薄膜傳感器的分壓值;V0為ADC電路總電壓,該系統為3.3V;R1為傳感器電阻值,取60Ω;R0為限流電阻,為47kΩ。
考慮到足底動態壓力可能超過使用者身體質量,為了讓壓力鞋墊模塊適用于更多人群,本文采用量程更大的壓力傳感器。圖3所示為傳感器實物規格圖,圖4所示為10kg量程的RFP603DW06GD柔性薄膜壓力傳感器的壓強-電阻值曲線圖。
1.2傳感器布局分析
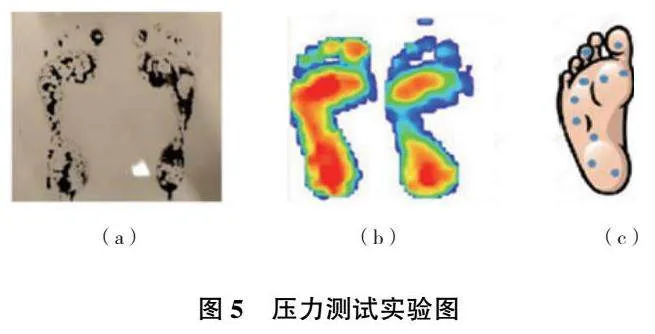
Tekscan公司的F-Scan系統[7]可以實時監測人體足底壓力情況并將壓力分布情況以圖像的形式呈現在上位機上。從系統觀察可知,人的足底壓力主要集中在腳后跟、腳前掌和腳趾3個部位[8];同時前期將足底涂滿墨水踩在干凈的亞克力板上,依據腳印形狀和墨水多少判斷壓力分布情況,實驗結果如圖5所示。綜合以上分析,在圖6(a)中的A—J位置布置10個壓力薄膜傳感器,對應的鞋墊實物如圖6(b)所示。
1.3系統硬件設計
1)壓力鞋墊模塊
壓力傳感器輸出的是變化的電阻信息,因此需要設計電路將電阻信息轉換成電壓信息,并將模擬信號采樣轉換成數字信號[9],然后儲存數據。這里采用分壓方式設計傳感器部分電路。系統共計10路壓力傳感器接口,根據實際情況選擇分壓電阻為47kΩ,無壓力時,傳感器阻值大于10MΩ,等效于斷路。
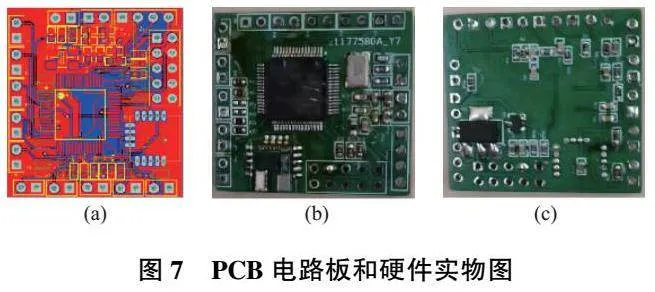
信號處理模塊以STM32F405RGT6為主控器[10-11],芯片提供3個ADC,最多可測量15個通道的外部信號源,最多可達到12位分辨率,提供了6個串口通信模塊(其中4個USART和2個UART)和1個SDIO接口。其主要職責是完成信號調節、濾波處理、電平變換、角度解算、數據存儲和傳輸等任務[12]。整個信號處理模塊主要由壓力信號調節部件、主控部件和電源部件等組成。硬件主板實物如圖7所示,其尺寸為30mm×30mm。
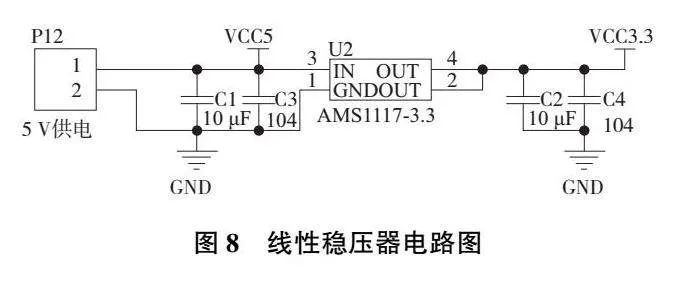
該系統采用電池供電,選擇電源芯片AMS1117-3.3將5V轉化為3.3V。此芯片體積小且穩定,是一種低漏失電壓調整器,其穩壓調整管由一個PNP驅動的NPN管組成的,有固定和可調兩個版本可用。這里選擇適用5.0V~3.3V的固定穩壓器。電路原理示意圖如圖8所示。
圖8中C1、C3是電源輸入濾波;VCC 3.3是3.3V電源,供模擬電路使用。
2)無線通信模塊
本文無線傳輸部分使用DX-BT24-T藍牙模塊,采用英國某公司14531芯片,配置256KB空間,遵循V5.1BLE藍牙規范。該模塊采用UART接口,具備低成本、小體積、低功耗以及收發靈敏度高等優點,只需要搭配少量外圍元件就能實現藍牙串口透傳的強大功能。
3)通信距離測試
為了檢驗步態數據信息獲取系統中藍牙通信的可用距離,本文將PCB板放置在鞋底進行了戶外藍牙設備連接測試。由于空間相對封閉,藍牙信號強度可能受到一定影響。將系統電源打開,用開發的手機藍牙軟件連接模塊藍牙,實驗者移動系統直至藍牙斷開。經多次測試可知:當系統與手機端的距離在5m內時可以快速連接且不容易中斷連接,因此在后續實際使用實驗過程中,盡量保持系統與手機端距離在5m內。
1.4系統軟件設計
系統軟件設計主要包括主控芯片的片上開發部分和上位機的軟件開發部分。片上開發部分使用C語言實現數據采集、數據處理、數據傳輸等多項功能,需要在主控芯片STM32F405RGT6中完成以下任務:1)實現多路足底壓力數據的ADC轉換;2)設置傳感器相關參數,配置系統工作模式和數據采樣頻率;3)配置串口發送、接收的波特率和數據輸出格式等;4)實現數據存儲。
1)數據采集程序實現
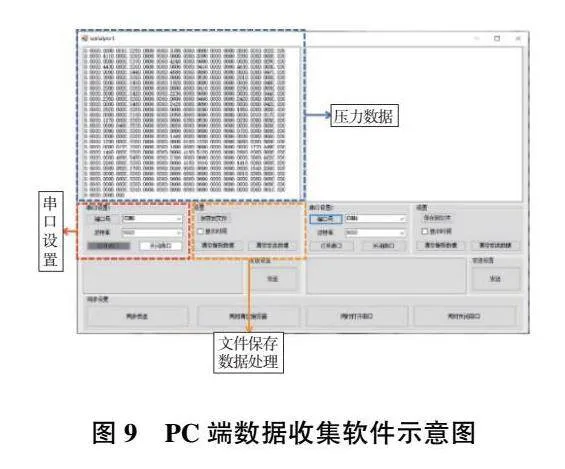
本文中數據采集裝置的軟件程序開發平臺是STM32CubeMX和Keil uvision 5.0。該裝置的數據采集功能由C語言編寫的嵌入式軟件程序控制實現,包含采集數據和導出數據兩大功能,上位機界面如圖9所示。
系統時鐘為168Hz;ADC由定時器驅動,以500 次/s的頻率進行精確采樣;串口發送速率為10Hz;串口波特率為9 600bit/s。傳感器在配置成功后開始進入測量模式,并在測量完成后存儲數據。
2)手機端軟件程序實現
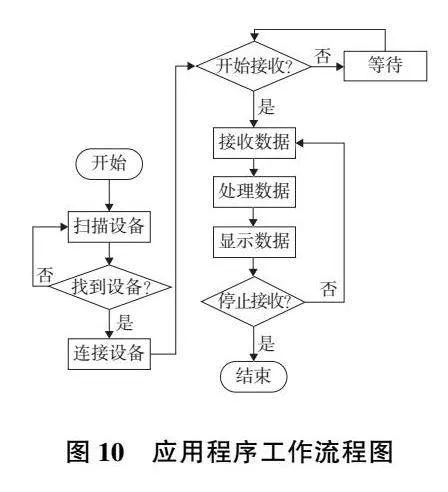
本文通過MIT app inventor平臺線上制作軟件開發手機端軟件,操作流程和使用方法簡單便捷。通過基于瀏覽器的編輯工具創建手機APP。之后經過連接線可將APP部署至手機上運行。本文所開發應用程序主要實現了BLE設備控制、傳感器數據顯示等功能,應用程序工作流程如圖10所示。
2足底壓力數據樣本
2.1特征數據采集
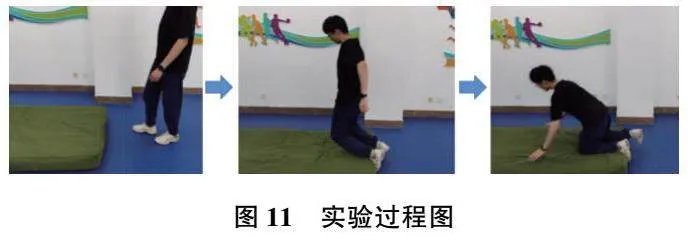
本系統將硬件集成部分嵌入足弓處,電池設置在腳腕處固定后進行數據采集。設定壓力傳感器采樣時間間隔為T=0.075s。實驗結果顯示:該系統能夠恰當地捕捉到人的步態特征,由此驗證這套系統可正確獲取人步行過程中的步態數據。為取得不同個體在多種狀態下的足底壓力數據,本文對10名志愿者進行數據樣本采集實驗,數據采集過程要求每位志愿者依次完成站立和行走兩種人體正常活動動作和人體異常摔倒動作。
摔倒行為在如圖11所示的海綿墊(厚度20cm)上進行,志愿者模擬下肢失去控制或因身體不適而摔倒。
2.2實驗數據分析
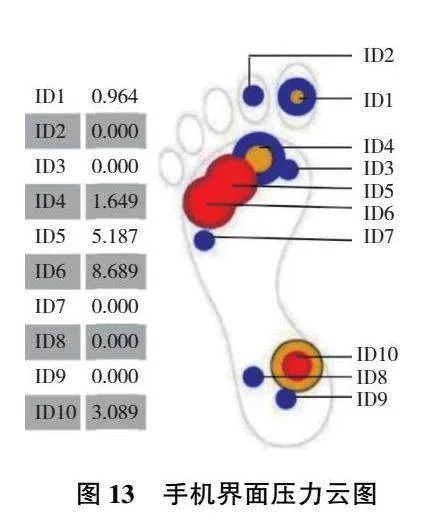
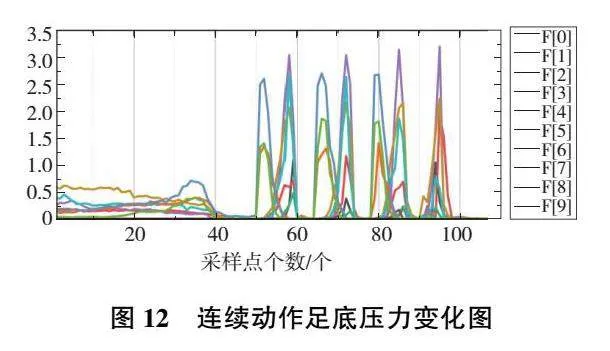
通過實驗采集到的足底壓力數據是一串時間間隔為150ms的離散數據,為方便對不同狀態下的壓力數據進行分析,對采集到的離散數據進行處理,繪制出直觀的變化曲線。圖12為一段連續動作足底壓力變化圖。站立狀態的足底壓力持續穩定,變化幅度最小;步行狀態的足底壓力數據周期性明顯,支撐相時足底各部分壓力增大后減小,擺動相時壓力較為穩定,摔倒后數據為0。圖13為某一時刻的手機軟件界面壓力云圖。在運動過程中志愿者可實時查看到足底壓力數據和云圖變化情況(本刊為黑白印刷,如有疑問請咨詢作者)。
3結語
本文首先分析了人體在日常活動中的步態變化,后自行設計可穿戴設備收集人體活動步態數據。對包括傳感器系統和信號處理模塊在內的整個足底壓力測量系統進行了硬件框架介紹;進而對信號處理模塊的軟件設計進行了介紹;最后利用這套數據采集系統進行實驗,分析不同狀態下足底壓力數據變化趨勢,以驗證此系統能夠正確有效地采集步態數據并獲取人的步態特征。
參考文獻:
[1] OUNPUU S. The biomechanics of walking and running[J]. Clinics in Sports Medicine,1994,13(4):843-863.
[2] 劉澤原. 基于智能鞋墊的步態分析及其應用研究[D]. 哈爾濱:哈爾濱工業大學,2019.
[3] 鮑根喜,王旭,夏新雷,等. 正常足步態周期中動態足橫弓形態的初步分析[J]. 中國矯形外科雜志,2001,9(4):2-5.
[4] MEHDIZADEH S,DOLATABADI E,NG K D,et al. Vision-based assessment of gait features associated with falls in people with dementia[J]. The Journals of Gerontology:Series A,2020,75(6):1148-1153.
[5] 趙嘉豪,葉梁杰,羅心韻,等. 基于STM32的光電搬運機器人設計與試驗[J]. 機械制造與自動化,2021,50(6):158-161,165.
[6] 林滔. 一種基于嵌入式小型PLC的智能控制模塊設計[J]. 機械制造與自動化,2022,51(5):219-222,234.
[7] ZAMMIT G V,MENZ H B,MUNTEANU S E. Reliability of the TekScan MatScan(R) system for the measurement of plantar forces and pressures during barefoot level walking in healthy adults[J]. Journal of Foot and Ankle Research,2010,3:11.
[8] 王明鑫. 正常中國成年人足底壓力分析[D]. 上海:同濟大學,2007.
[9] 劉萬兵,劉海軍,曹勇,等. 基于STM32的信號采集卡設計[J]. 電子設計工程,2022,30(18):100-103,109.
[10] 張旭,亓學廣,李世光,等. 基于STM32電力數據采集系統的設計[J]. 電子測量技術,2010,33(11):90-93.
[11] 喻金錢,喻斌. STM32F系列ARM Cortex-M3核微控制器開發與應用[M]. 北京:清華大學出版社,2011.
[12] WANG L,HU W M,TAN T N. Recent developments in human motion analysis[J]. Pattern Recognition,2003,36(3):585-601.
收稿日期:20230324
第一作者簡介:余珂欣(1996—),女,陜西咸陽人,碩士研究生,研究方向為航天仿生科學與技術,2865378873@qq.com。
DOI:10.19344/j.cnki.issn1671-5276.2024.06.027
猜你喜歡
現代電子技術(2016年22期)2016-12-26 12:36:15
電子技術與軟件工程(2016年22期)2016-12-26 11:11:30
現代電子技術(2016年22期)2016-12-26 09:44:35
電子技術與軟件工程(2016年19期)2016-12-19 19:59:14
電腦知識與技術(2016年27期)2016-12-15 20:42:01
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
