基于自主飛行器的柑橘病害監護系統設計與實踐
2024-12-31 00:00:00余煥杰江華晉彭東海
智慧農業導刊 2024年11期
關鍵詞:深度學習


基金項目:廣東省省級大學生創新創業訓練計劃項目(S202310576020X);韶關市科技局項目(220607154531465)
*通信作者:彭東海(1975-),男,碩士,副教授。研究方向為人工智能、智慧農業及高等教育。
DOI:10.20028/j.zhnydk.2024.11.001
摘" 要:針對人工手段下的柑橘病害監護過程中存在的效率低下與成本巨大的問題,基于自主飛行器對柑橘病害監護系統進行設計與實踐。該監護系統主要由感知層、應用層、分析層3個部分組成。為了使飛行器可以準確地識別柑橘病害,利用DenseNet121與EfficientNetB7深度學習模型框架訓練出專用于識別柑橘病害的柑橘病害識別模型,并將其部署在位于自主飛行器的香橙派開發板上,從而為自主飛行器提供識別柑橘病害的能力。為了驗證該病害監護系統的性能,進行測試試驗。試驗結果表明,該病害監護系統具有良好的發展潛能,模型擁有良好的檢測精度與可移植性。
關鍵詞:智慧農業;深度學習;圖像識別;飛行器設計;病害監護系統
中圖分類號:TP391.4" " " 文獻標志碼:A" " " " " 文章編號:2096-9902(2024)11-0001-05
Abstract: Aiming at the problems of low efficiency and huge cost in the process of citrus disease monitoring by manual means, a citrus disease monitoring system is designed and practiced based on an autonomous aircraft. The monitoring system is mainly composed of three parts: perception layer, application layer and analysis layer. In order to enable the aircraft to accurately recognize citrus diseases, a citrus disease recognition model dedicated to recognizing citrus diseases was trained using the DenseNet121 and EfficientNetB7 deep learning model framework, and deployed on the Aroma Orange Pi development board located in the autonomous aircraft, thus providing the autonomous aircraft with the ability to recognize citrus diseases. In order to verify the performance of the disease monitoring system, tests were carried out. The experimental results show that the disease monitoring system has good development potential, and the model has good detection accuracy and portability.
Keywords: smart agriculture; deep learning; image recognition; aircraft design; disease monitoring system
近年來,農作物病蟲害對農業生產的負面影響愈發嚴重,利用科技對農作物病蟲害進行監護管制已經成為不可避開的時代話題。中國作為農業大國,曾面臨多達1 400種重要農作物病蟲害的困擾。病害種類多樣且具有潛在爆發性的情況下[1],對病蟲害進行準確、實時、高效監測,及時采取防治措施以最大限度減少作物損失,成為當前農作物生產領域亟需解決的重要問題。傳統的監測方法主要依賴于研究人員的調查,但其耗時費力、準確性低、時效性差、研究范圍有限,且易受人為因素干擾[2]。然而,近年來圖像處理技術和機器學習為柑橘病害識別提供了新思路,摒棄了傳統人工調查的缺點。專家以往主要依靠觀察病斑顏色形態和經驗判斷病害類型,而現在利用深度學習模型,則可以在保證高精度判斷病害的同時,減少人工調查的不足[3]。
農業發展一直伴隨科技進步不斷變革。自20世紀90年代以來,隨著3S(全球定位系統GPS、地理信息系統GIS、遙感RS)技術、變量控制技術、專家系統、 作物生長模擬系統以及生產管理決策支持系統等技術的研究與應用,將傳統農業技術與現代信息技術結合,形成了新型的先進農業技術體系。這一融合將人類農業引入數字和信息時代,成為合理利用農業資源、提高農作物產量、降低生產成本和改善生態環境的主要農業生產形式[4]。
盡管航天、航空和地面遙感技術廣泛應用于農田作物的生長監測,強化了農作物的精準管理,提升了農業生產效益。然而,這些技術卻存在著操作復雜、成本高昂、受天氣影響大等問題,限制了其進一步應用[5]。為了應對這些問題,本文采用組裝的自主飛行器構建柑橘病害監護系統,自主飛行器屬于穿越機(FPV)在結合現代信息技術后研發的新型機器,其與無人機(UAV)相比,在兼具無人機功能的情況下,具有低成本、高性能及高度模塊化的特點。
1" 自主飛行器設計
1.1" 總體設計
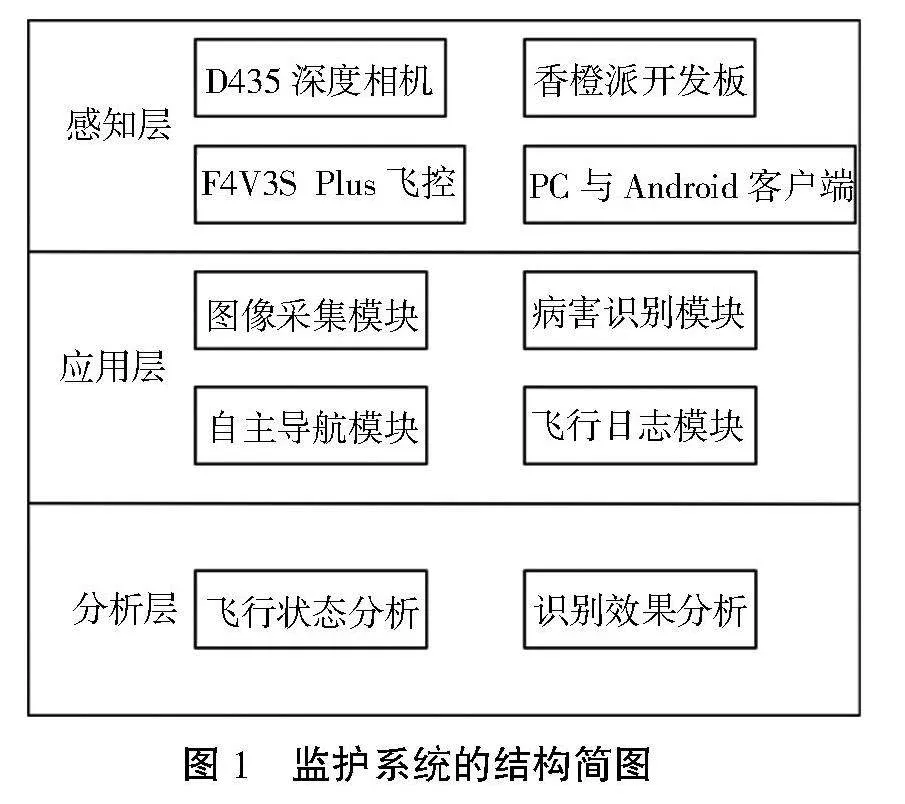
該監護系統的系統設計分為3層,分別為感知層、應用層和分析層(如圖1所示)。
感知層是監護系統中最基礎的一部分,主要包括D435深度相機、香橙派開發板、F4V3S Plus飛控及PC與Android客戶端4個部分。
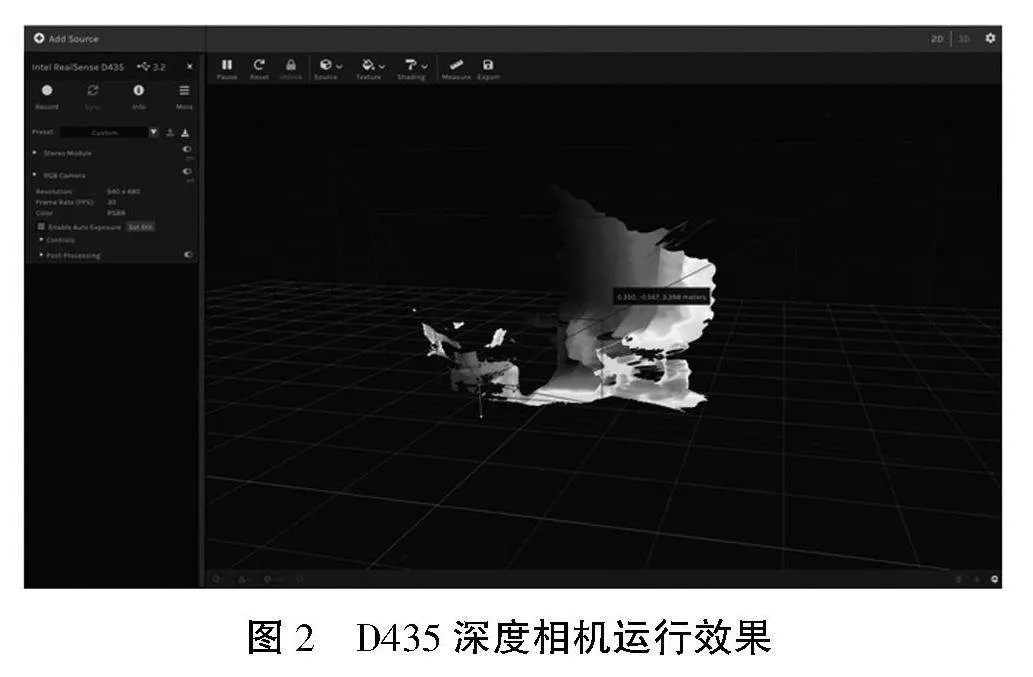
RealSense D435深度相機是Intel公司推出的產品,其深度圖像頻率可達到90 Hz[6],這項技術的基本原理是利用左右兩側的近紅外激光器,在目標物體上投射具有特定結構特征的光線,然后使用紅外攝像頭進行圖像采集。這些具有特定結構的光線,因物體不同深度區域而采集不同的圖像相位信息,再通過運算單元將這種結構變化轉化為深度信息。簡單來說,利用光學手段獲取目標物體的三維結構,并進一步應用所獲得的信息。一般使用特定波長的不可見紅外激光作為光源,其發出的光經過編碼后投影在物體上,通過特定算法計算返回的編碼圖案的變形,從而獲取物體的位置和深度信息[7]。通過對D435深度相機的調用,系統可以實現自主導航功能和圖像采集功能(如圖2所示)。
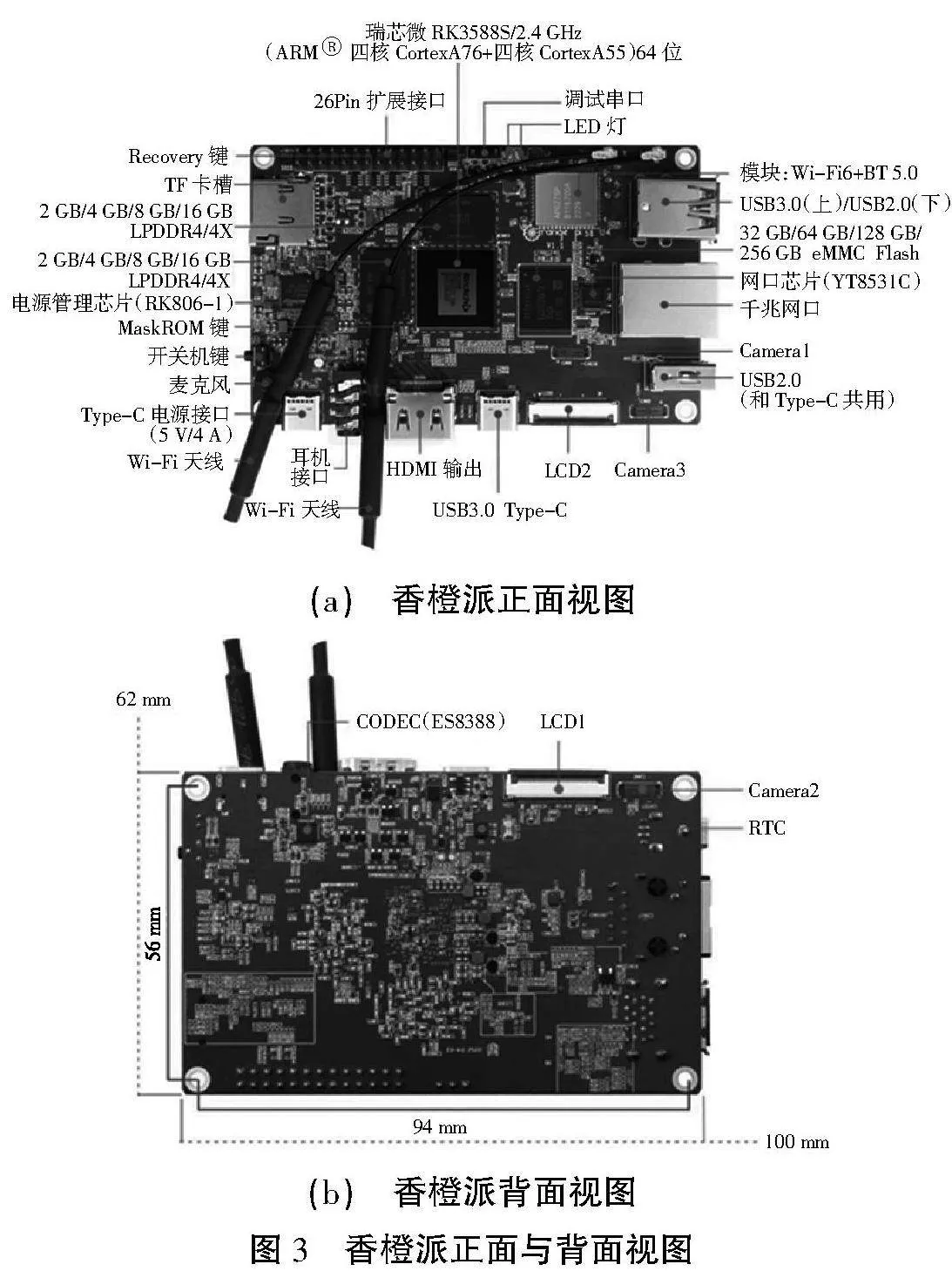
香橙派是一款國內自主研發的新一代ARM開發板,可支持多種操作系統,如Orangepi OS、Android、Ubuntu、Debian等[8](如圖3所示)。相對于其他ARM開發板如樹莓派,香橙派擁有更多型號和種類,功能強大,價格也較為經濟實惠[9]。本研究使用了香橙派5B作為機載電腦。該版本的香橙派采用了瑞芯微RK3588S最新一代的八核64位處理器,采用了8 nm工藝,主頻可達2.4 GHz。它集成了ARM Mali-G610 MP4 GPU,內置了高性能的3D和2D圖像加速模塊,并搭載了高達6 Tops算力的AI加速器NPU。該設備內存為16 GB RAM和128 GB eMMC,支持雙頻Wi-Fi6和BT5.0,同時兼容BLE。它具備高達8K顯示處理能力,在本監護系統中,香橙派可以提供自主導航和圖像識別等功能的支持。
本系統采用Omnibus F4V3S Plus飛控作為飛行控制系統(如圖4所示)。飛控的設計需要清晰的優先級結構和可靠的定時系統,以確保控制循環的準確執行。它采用多線程操作系統和高效的驅動程序,正確調度中斷優先級來實現這一目標。飛控軟件包括導航、航路規劃與制導、飛行管理、飛行控制以及相關日志記錄數據存儲單元。目前,大多數飛控系統都是在開源飛控資源的基礎上進行二次開發。飛控的基本邏輯包括飛行計劃、位置信息設定、姿態信息設定和電機驅動信號輸出。位置和姿態信息的數據來自傳感器系統的監測數據,并通過各種融合算法輸出位置和姿態信息[10]。
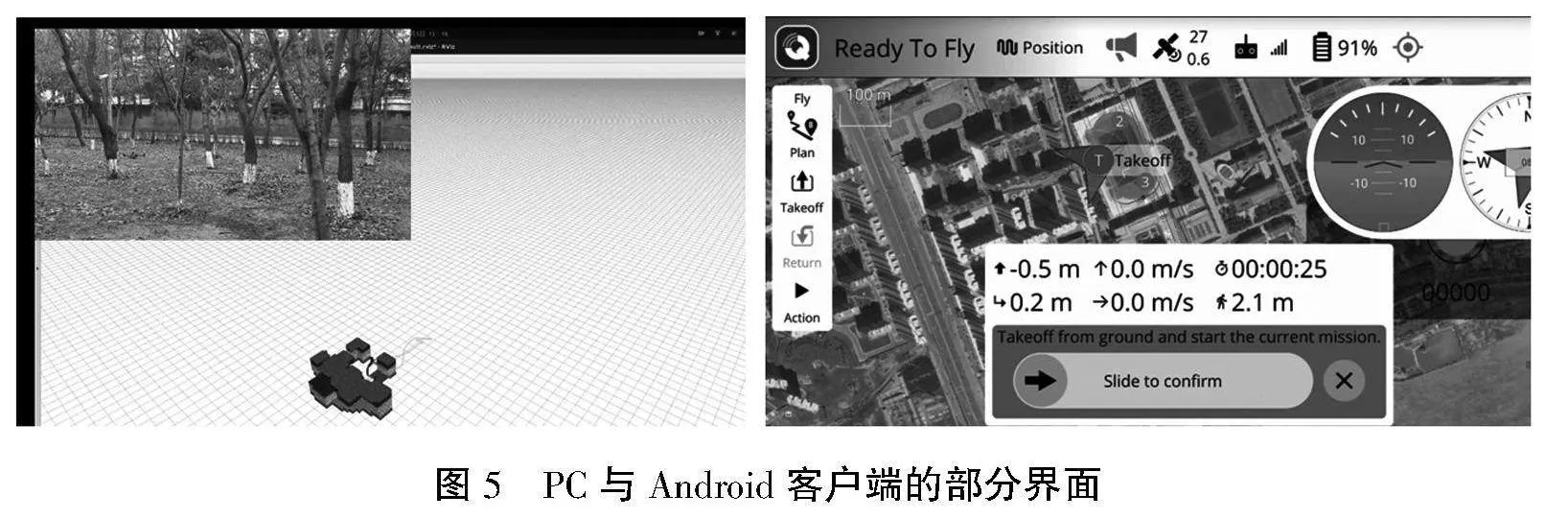
PC與Android客戶端可以實現用戶與系統之間的交互,利用QGroundControl軟件(如圖5所示),在PC端,通過Ubuntu操作系統SSH遠程連接香橙派機載電腦,可實現標定航點自主導航、調用深度相機及進行病害識別等功能;在Android客戶端,同樣可以進行飛行器的路線規劃。該過程的原理為利用遙控器的接收器,實現通道互通,進而再利用主機或移動設備向接收器發送信號,實現飛行器的自主導航。
1.3" 應用層
應用層主要的作用為對感知層獲取的信息進行處理。該系統的應用層由圖像采集模塊、病害識別模塊、自主導航模塊及飛行日志模塊4個部分組成[11]。
1.4" 分析層
分析層的主要作用為對感知層獲取的信息進行分析。該系統的分析層主要由飛行狀態分析和識別效果分析兩部分組成。
2" 病害識別模型設計
2.1" 數據集
通過網絡爬蟲收集了部分柑橘葉片病害數據,整理后上傳到了Kaggle網站,該數據集共596張圖片,其中訓練集496張,測試集100張,數據集中的健康葉片(healthy)43張,炭疽病(anthracnose)144張,潰瘍病(canker)132張,黃龍病(greening)177張。
2.2" 數據增強
2.2.1" 水平和垂直翻轉
圖像翻轉后,所有的主要特征均保持不變,對人類來講,這些變化可能并不顯著,但對模型算法而言,翻轉后的圖像可能看起來會完全不一樣(如圖6所示)。
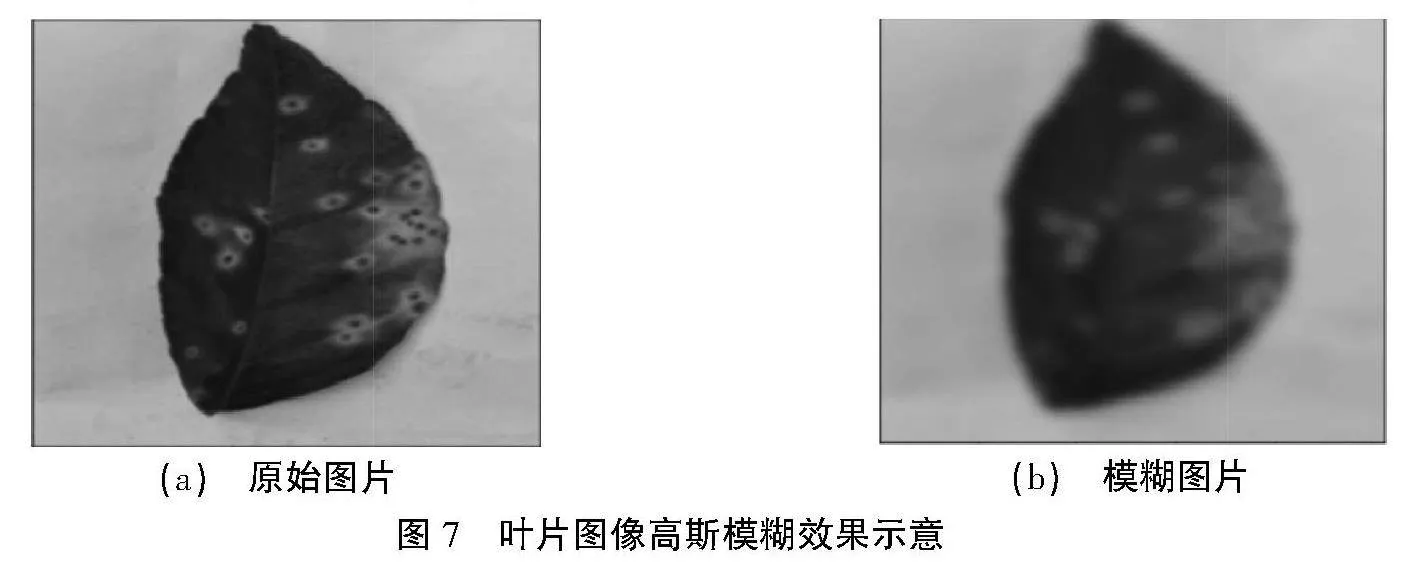
2.2.2" 高斯模糊
模糊方法可以掩蓋一些并不重要的細節,平滑圖像,提高模型識別的準確率(如圖7所示)。
2.2.3" 葉片的邊緣檢測
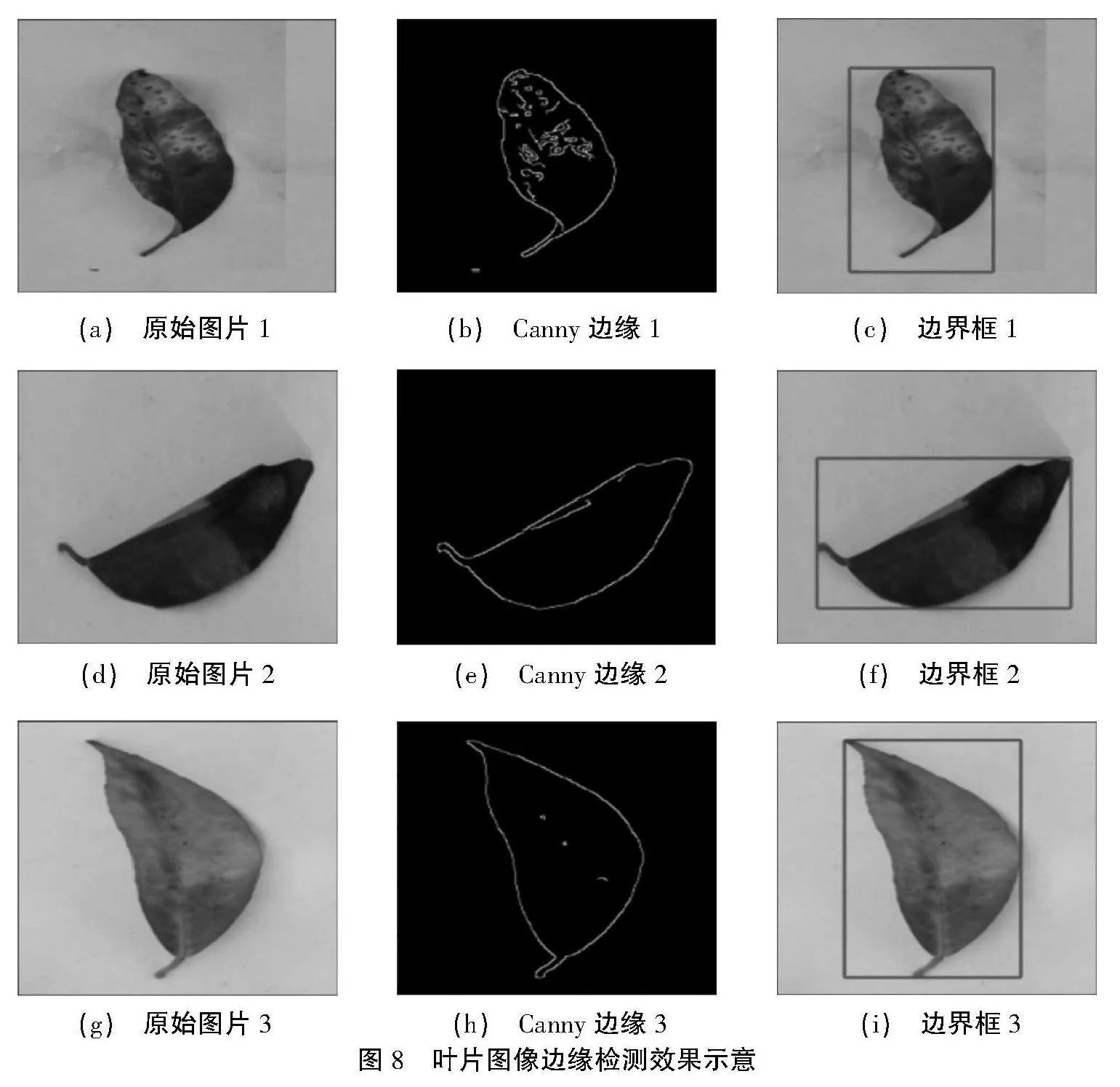
采用Canny邊緣檢測算法,根據邊界框裁剪圖像,得到葉片的整體或大部分,從而剔除原有圖像背景信息的干擾,特別是剔除大量的綠色背景,可以讓模型聚焦于葉片的關鍵特征(如圖8所示)。
2.3" 模型的定義與訓練
DenseNet模型采用了跳連的理念,通過將網絡內的所有層兩兩相連,最大化了特征信息的傳遞。這使得每一層都能接收前面所有層的特征作為輸入,增強了特征的傳播和重復利用,同時減輕了梯度消失的問題。
EfficientNet則是2019年由Google研究小組推出的模型,它通過對網絡深度、寬度和輸入分辨率進行縮放來尋找最優模型。從EfficientNet-B0這一基準結構開始,它在深度、寬度和分辨率3個方面進行了迭代復合搜索。最終的EfficientNet-B7在ImageNet數據集上取得了84.4%的top1精度和97.1%的top5精度。
在本文中,采用了基于Keras框架的DenseNet121預訓練模型作為遷移學習的基礎,設定了參數并完成了模型的編譯。遷移學習模型使用了基于ImageNet預訓練的權重參數,去除了DenseNet121的頂層,并添加了一個全局平均池化層,隨后連接了一個根據數據集標簽數量定義的Softmax全連接層,以實現分類邏輯。
另外,也使用了基于ImageNet數據集訓練好的EfficientNetB7模型,重新定義了遷移學習模型的結構。同樣去除了EfficientNetB7的頂層,添加了一個全局平均池化層,并在其后連接了一個根據數據集標簽數量定義的Softmax全連接層,以實現分類邏輯。這個模型的學習參數達到了63 797 204個,是DenseNet121的9.17倍。
3" 試驗分析與結果
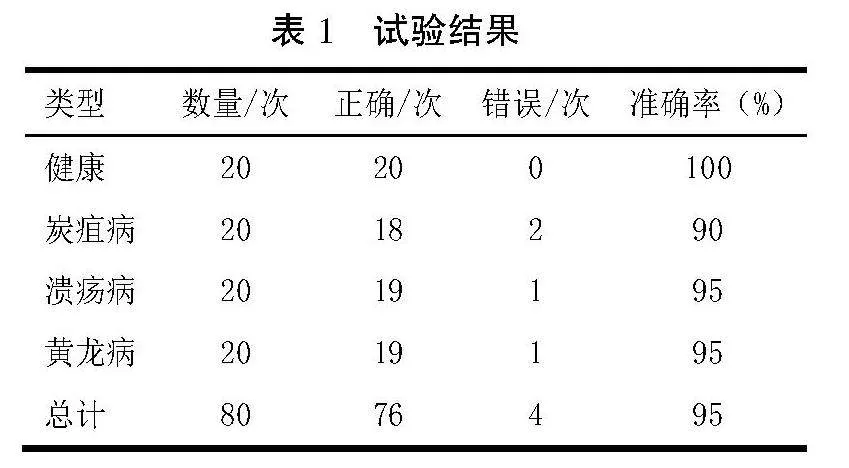
為了驗證系統的識別準確性,共進行了80次驗證測試,并對驗證結果進行了統計,見表1。從表1可以看出,該系統具有一定的魯棒性和實用性。
4" 結束語
針對農作物病害監控,本文開發了柑橘病害監護系統,利用先進的感知技術和機器學習,實現了自主飛行器的構建和病害識別。監護系統使用了RealSense D435深度相機和香橙派開發板等設備,結合DenseNet和EfficientNet模型,成功識別柑橘葉片病害。系統在試驗中表現出了較高的準確率和魯棒性,為農業生產帶來智能化監控方式。盡管技術仍有挑戰,但自主飛行器的低成本和高性能將為未來農業提供更多可能性。
參考文獻:
[1] 張競成,袁琳,王紀華,等.作物病蟲害遙感監測研究進展[J].農業工程學報,2012,28(20):1-11.
[2] 宋勇,陳兵,王瓊,等.無人機遙感監測作物病蟲害研究進展[J].棉花學報,2021,33(3):291-306.
[3] 張敏,劉杰,蔡高勇.基于卷積神經網絡的柑橘潰瘍病識別方法[J].計算機應用,2018,38(S1):48-52,76.
[4] 王素珍,吳崇友.3S技術在精準農業中的應用研究[J].中國農機化,2010(6):79-82.
[5] 汪沛,羅錫文,周志艷,等.基于微小型無人機的遙感信息獲取關鍵技術綜述[J].農業工程學報,2014,30(18):1-12.
[6] 方正,趙世博,李昊來.一種融合稀疏幾何特征與深度流的深度視覺SLAM算法[J].機器人,2019,41(2):185-196,241.
[7] 李科,毋濤,劉青青.基于深度圖與改進Canny算法的人體輪廓提取[J].計算機技術與發展,2021,31(5):67-72.
[8] 王賽,劉子龍.基于4G網絡的移動機器人遠程控制研究[J].軟件導刊,2019,18(11):71-74.
[9] 于鐳,林再騰.基于香橙派的智能語音識別系統的設計[J].電子測量技術,2019,42(19):36-40.
[10] 周飛.多旋翼無人機飛控系統硬件架構設計研究[J].電子制作,2023,31(15):112-115,119.
[11] 馬浚誠,李鑫星,溫皓杰,等.面向葉類蔬菜病害識別的溫室監控視頻采集系統[J].農業機械學報,2015,46(3):282-287.
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49