全地形雙臂水果采摘機器人設計
2024-12-31 00:00:00李孝王玉勤朱慶卓韓信張登
鄉村科技 2024年14期
關鍵詞:機械臂

摘 要:為有效解決當前采摘業面臨的勞動力短缺、低采摘效率及高雇傭成本等問題,提出了一種全地形雙臂水果采摘機器人的設計方案。該機器人集成了雙臂采摘裝置、果實識別系統、路徑識別系統等模塊。該機器人可以精準識別果蔬位置,合理規劃采摘路徑,從而提高水果的采摘效率。為檢驗機械臂連接裝置的結構強度是否滿足使用要求,對其進行有限元分析。計算結果顯示,所設計的連接裝置靜力學特性穩定,符合設計標準。所設計的采摘機器人可以提高采摘作業的效率,降低人力成本,對推進農業現代化水平具有重要的促進作用。
關鍵詞:采摘機器人;機械臂;全地形;路徑識別系統
中圖分類號:TP242 文獻標志碼:A 文章編號:1674-7909(2024)14-139-4
DOI:10.19345/j.cnki.1674-7909.2024.14.031
0 引言
傳統的水果采摘主要依賴人工,這一方法在歷史上對農業生產有著不可替代的貢獻。然而,隨著時間的推移,這種依賴人力的方式逐漸暴露出其局限性。一方面,這種方式不僅效率低下,而且勞動強度大;另一方面,這種方式對工人的身體健康也有一定影響。此外,由于城市化進程的加速和人口老齡化的加劇,農業勞動力短缺已經成為一個全球性的問題[1]。
隨著農業現代化的推進和科技的快速發展,農業生產正逐步實現智能化、機械化和自動化。研發可靠的采摘機器人已成為許多人的共同愿望。王文杰[2]設計了一款可以控制底盤移動和升降的雙臂采摘機器人,利用K-means聚類算法提高了其采摘效率。趙源深[3]利用驅動控制系統和特征圖像融合技術對番茄進行定位,提高了機器人的采摘精度和效率。鮑秀蘭等[4]設計了一種丘陵地形適用的柑橘采摘機器人,利用自適應調平、視覺定位和特制執行器實現了高效采摘。這些采摘機器人的研究設計取得了良好的效果,并為該領域后續的研究和發展提供了重要參考。
為解決采摘業當前的勞動力短缺等問題,筆者擬開發一款全地形雙臂采摘機器人。該機器人結合履帶式車輪、機械臂、視覺識別系統、超聲波感應系統和力傳感器等技術,可以實現機械臂對果實的精準采摘。該技術的應用將為高效率、低成本的采摘工作提供有效的解決方案。
1 工作原理及設計思路
1.1 工作原理
全地形雙臂水果采摘機器人由履帶式車體和雙采摘機械臂構成,能夠全天候、全地形、全時段地進行采摘工作,極大地提高了采摘效率。首先,機器人利用履帶式車體上的超聲波傳感器進行路徑識別;然后,由果實識別系統篩選成熟果實;最后,由雙機械臂協同采摘,將成熟果實放入車體上的收集筐。當收集筐的重量達到預設值后,機器人自動返回初始地點。此外,該機器人也可以人工操控。
1.2 整體設計思路
雙臂采摘機器人采用模塊化設計,允許機器人的機械臂、傳感器系統、動力系統等組件獨立且可更換。這種設計便于維護和升級,同時允許機器人根據作業需求快速調整配置。履帶式車輪使采摘機器人能夠應對各種地形條件,包括在陡峭的山坡、泥濘的田地或不平整地面上穩定移動。雙臂設計和機械臂的可拆卸性提供了適應不同高度和角度采摘的靈活性。機器人配備超聲波和色標傳感器,可實現對環境的精確感知。這些傳感器使機器人能夠識別成熟果實并規劃最佳采摘路徑。
2 主要結構設計
2.1 整體結構設計
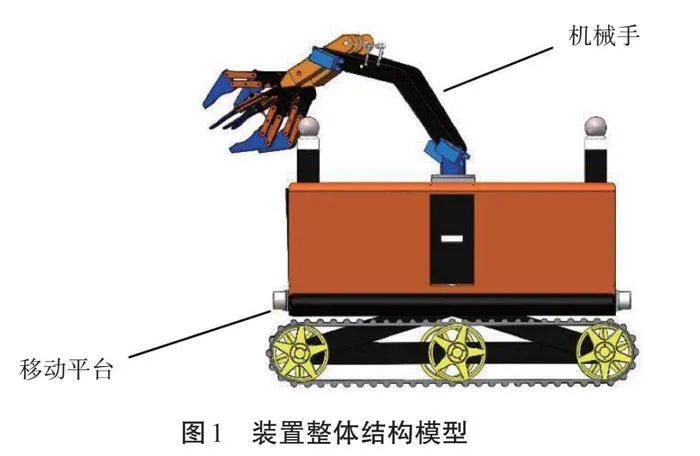
采摘機器人主要由機械手和移動平臺組成,其模型如圖1所示。機器人通過移動平臺上的裝置配合,能夠到達采摘位置。然后機械手采摘果實,放入車體內,并最終返回初始位置。
2.2 采摘裝置設計
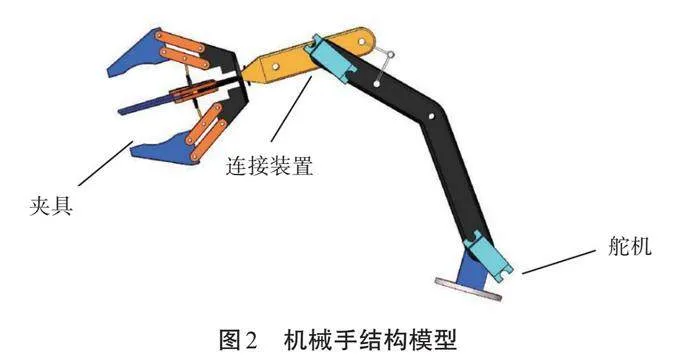
該機械手具有2個活動關節,具有很高的靈活性,使其能夠摘取不同位置的果實,其結構如圖2所示。該機械手前端夾具可替換,以適應不同果實的摘取需求;配合高清攝像頭和力傳感器,可實現高效精準的采摘。為了使采摘機器人適用于不同環境并擴大采摘范圍,機械手采用球坐標式設計。機械手的關節數量可根據需要調整,以增加自由度并提高靈活性[5]。
該末端執行器由夾具、執行器、傳感器和連接裝置等4個部分組成。夾具直接與果實或植物接觸,并且可以根據不同的采摘需求選擇使用剪刀、采摘爪等工具;執行器采用舵機驅動,負責驅動末端執行器進行上升、下降、旋轉等動作。傳感器在末端執行器中扮演監測角色,特別是力傳感器,與視覺算法結合使用,以實現對果實成熟度的精確識別。連接裝置用來確保末端執行器能夠與機器人臂同步運動,從而完成復雜的采摘任務。
2.3 移動平臺設計
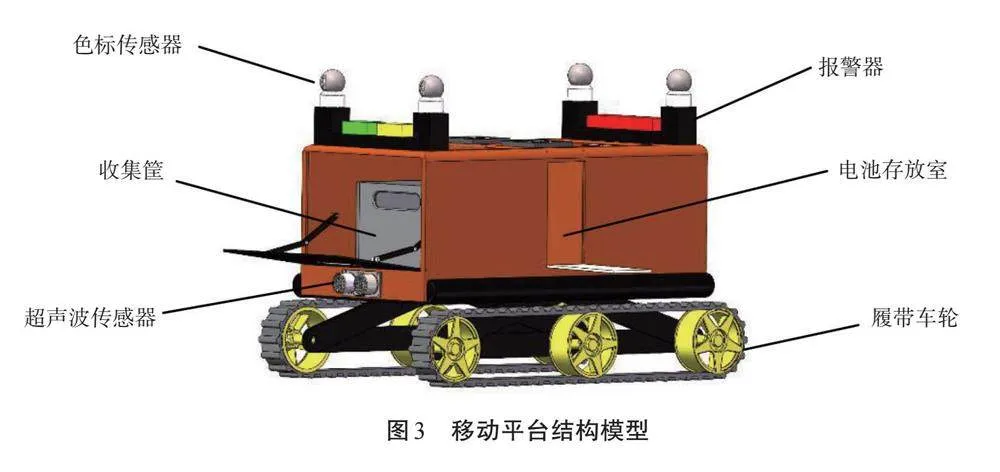
該移動平臺主要由履帶車輪和車架組成,具體結構如圖3所示。履帶車輪由橡膠履帶、三角支架、驅動輪、支撐輪、漲緊輪、防側翻裝置和連接盤等組件構成,這使得其能夠適應各種地形,具有高通過性和穩定性,從而大大擴展了機器人的使用范圍[6]。車架配備超聲波傳感器,與履帶車輪協同工作,確保車體正常移動。車架內部裝有2個果實收集筐,便于存放機械手采摘的果實[7]。車架最上方裝有狀態指示燈:故障時紅燈亮起,并伴有蜂鳴器響應;機器正常運行時,綠燈常亮;暫停工作時,黃燈常亮。這種狀態指示燈使工作人員能更好地觀察機器狀態,并及時進行維修,有效降低機器報廢率。電池存放室位于車架中,為機械手提供電源,同時方便電池更換。
2.4 果實識別系統設計
色標傳感器通過發射光源照射被測果實,并接收果實反射回的光線[8]。由于果實位于各個方位,為確保光源始終垂直于目標物體,且接收器與物體成銳角,該色標傳感器配備高清攝像頭外殼,可以進行不同方位的旋轉,以確保只檢測來自目標物體的散射光,避免接收直射反射光。接收器將接收到的光信號轉換為電信號,并通過信號處理電路進行分析。根據分析后的信號強度,色標傳感器識別反射光的顏色特征,然后通過輸出接口發送控制信號,引導機械手采摘成熟果實。
2.5 路徑規劃設計
超聲波感應器由發射器和接收器組成,發射器產生超聲波信號,接收器接收反射信號。利用這一過程進行距離測量、定位和障礙物識別,以實現車體的自動移動[9]。超聲波感應器具有高精度、強抗干擾能力和低成本的特點。該機器人車體配備了2個超聲波感應器,可提高車體前后移動的靈活性。
3 關鍵零件有限元分析
有限元分析是一種數值方法,用于簡化復雜問題,可將問題分解為小的、易于求解的子問題。該采摘機器人具有高計算精度和適應復雜形狀的能力。在采摘機器人中,機械手與夾具之間的連接裝置發揮著至關重要的作用。因此,利用Solidworks三維軟件對連接裝置進行有限元分析,對提高采摘機器人的耐用性和性能至關重要[10]。
連接裝置在正常工作時受到夾具和機械手的影響,其基本屬性如表1所示。
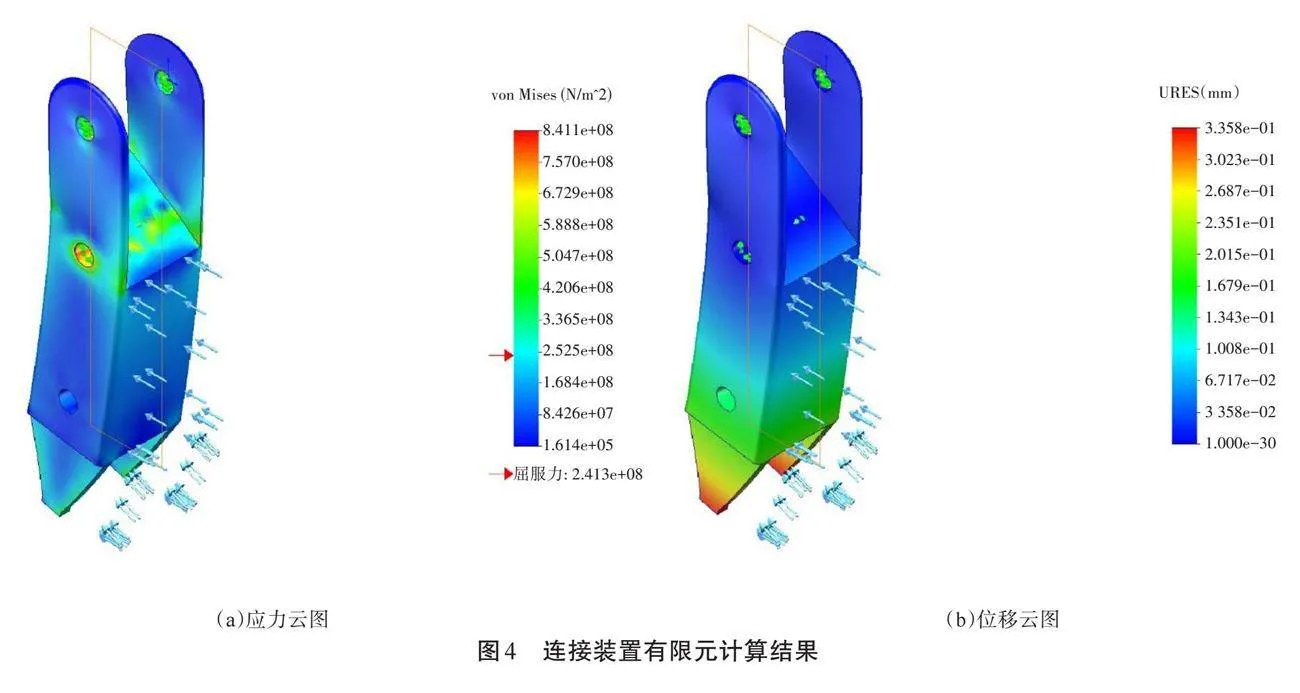
經過計算可以得到連接裝置的應力云圖和位移云圖,如圖4所示。
應力云圖顯示連接裝置的最大應力位于中心位置,最大應力為252 MPa,低于合金鋼的張力強度。位移云圖顯示,連接裝置零件的最大位移出現在連接夾具處,最大位移為0.335 8 mm,且位移變化保持在合理范圍內。因此,所設計的連接裝置符合正常工作條件下的強度要求和設計規范。
4 結束語
筆者設計了一款全地形雙臂采摘機器人,旨在提升農業生產的自動化與智能化水平。通過整合先進的機械設計、精確的自動化控制算法和智能感知決策系統,使得機器人能在復雜地形中高效、精確地采摘水果。為檢驗機械手與夾具之間的連接裝置是否滿足強度要求,對其進行有限元分析。有限元計算結果表明,所設計的連接裝置結構性能穩定,滿足使用要求。所設計的機器人展現出卓越的適應性和穩定性,能夠適應各類果園的多變地形和環境;其雙臂協同工作機制提升了采摘效率,同時減少了果實損傷。由此可見,該設計對提升農業生產的自動化和智能化水平具有重要意義。
參考文獻:
[1]趙春江,范貝貝,李瑾,等.農業機器人技術進展、挑戰與趨勢[J].智慧農業(中英文),2023,5(4):1-15.
[2]王文杰.基于自然場景語義理解的蔬果采收機器人靈巧摘取方法[D].上海:上海交通大學,2022.
[3]趙源深.西紅柿采摘機器人目標識別、定位與控制技術研究[D].上海:上海交通大學,2018.
[4]鮑秀蘭,馬志濤,馬蕭杰,等.丘陵果園自然環境下柑橘采摘機器人設計與試驗[J].農業機械學報,2024,55(4):124-135.
[5]李玲,顧曉宇.農業采摘機多自由度機械臂設計研究[J].南方農機,2024,55(7):50-52.
[6]仇毅,柳雨京,張劼.一種履帶式農用機器人底盤車的設計與試驗[J].江蘇農機化,2024(3):14-17.
[7]潘運丹,林藝鑫.多傳感器信息融合的教學移動機器人設計[J].物聯網技術,2024,14(7):99-103,106.
[8]黃晨.探討智能型色標傳感器的原理與應用[J].時代農機,2016,43(11):61,63.
[9]楊亭,周健,陳文輝,等.基于超聲波傳感器的雙足步行機器人避障系統設計[J].現代制造技術與裝備,2024,60(1):45-47.
[10]郭自良,殷程凱,吳玄博,等.水果采摘機械手關鍵技術研究現狀與展望[J].江蘇農業學報,2024,40(6):1142-1152.
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
