無人機激光掃描測繪系統誤差的模型檢校技術及實驗研究
2024-12-31 00:00:00曹曉楨吳健查澤超
科技創新與應用 2024年20期



摘 "要:該文提出一種檢驗和校正無人機激光掃描測繪系統誤差的技術,并設計實驗對該技術的誤差檢校效果進行驗證。該技術的實現方法是根據系統主要誤差構建基于航帶平差的差異分析模型。無人機航測獲得掃描數據后,使用迭代最近點(ICP)算法對采集到的數據進行航帶點云配準,得到航帶平差。將平差參數輸入到差異分析模型中解算出系統誤差,利用解算結果補償系統、消除誤差,從而達到系統校正的效果。從實驗結果來看,使用系統誤差模型校驗技術后,初始點云圖和校準后的新點云圖在不同方向的航帶點云顏色深淺一致,說明高程誤差被消除。
關鍵詞:無人機激光掃描測繪系統;重疊航帶;迭代最近點(ICP)算法;差異分析模型;誤差校驗
中圖分類號:P231 " " "文獻標志碼:A " " " " "文章編號:2095-2945(2024)20-0088-04
Abstract: In this paper, a technique for checking and correcting the errors of laser scanning surveying and mapping system of unmanned aerial vehicles(UAVs) is proposed, and experiments are designed to verify the error detection effect of this technique. The realization method of this technology is to build a difference analysis model based on the adjustment of flight belt according to the main errors of the system. After the UAV aerial survey obtained the scanning data, ICP algorithm was used to register the collected data and obtain the adjustment of the band. The adjustment parameters are input into the difference analysis model to solve the system error, and the solution results are used to compensate the system and eliminate the error, so as to achieve the effect of system correction. According to the experimental results, after using the system error model verification technology, the color depth of the point clouds in different directions of the navigation belt is the same between the initial point cloud image and the calibrated new point cloud image, indicating that the elevation error is eliminated.
Keywords: UAV laser scanning mapping system; overlapping flight strip; ICP algorithm; difference analysis model; error check
利用無人機搭載激光掃描測繪系統獲取地面三維信息,能夠克服傳統測繪方法工作量大、效率低等缺點,在地形測繪、環境監測、災后救援等方面發揮了重要應用。為了更好地滿足實際需求,對無人機激光掃描測繪系統的精度提出了更高要求。但是在實際作業過程中,由于存在激光測距誤差、掃描角誤差、GNSS定位誤差等諸多因素的影響,導致點云數據精度不夠高。如何進一步提升無人機激光掃描測繪結果的精度,成為航空遙感領域的前沿研究課題。
1 "無人機激光掃描測繪系統誤差的模型檢校技術
1.1 "差異分析模型的構建
隨著機載激光掃描測繪系統在各個領域的廣泛應用,國內外學者對于如何進行系統誤差檢驗與校正進行了大量研究,目前,比較成熟的檢校方法有分布幾何法、Filin自然表面法、航帶平差法等。本文選用航帶平差法,其原理是將多次掃描得到的重疊航帶間的同名點差異參數作為輸入量,建立多參數(六參數、十二參數等)平差模型,經過模型處理后重新補償系統,達到誤差校正的目的。
1.1.1 "誤差參數的選取
在無人機激光掃描測繪系統的應用中,其誤差來源有多種,本文選擇了比較常見的安置角誤差、偏心距誤差和激光測距誤差,構建了平行重疊航帶間的差異分析模型。同時,通過迭代最近點(ICP)算法,對相鄰2條平行重疊航帶進行點云配準,獲得2條航帶間的六參數航帶平差,結合外方位角和平移向量完成對平行重疊航帶的差異檢測[1]。安置角是慣性傳感器(IMU)與激光掃描儀連接時各個軸之間的角度,用(ω,φ,κ)表示。理論上安置角為0,但是在實際安裝時由于材料誤差、安裝質量、配件兼容性等因素的影響,安置角存在一定的誤差,表示為(Δω,Δφ,Δκ)。同樣的,IMU與激光掃描儀進行中心偏移測量時,由于機載設備安裝精度、外界風力和電磁干擾等因素的影響,也會產生測量偏差,即偏心距誤差,用(ΔX,ΔY,ΔZ)表示。激光掃描儀在測距時,由于計時器穩定性、大氣不均勻性等因素的干擾,距離的測量結果與真實值之間也會存在誤差,用Δρ表示。
1.1.2 "差異分析模型的建立
使用同一架無人機對同一范圍進行2次不同航跡的掃描時,理論上航帶重疊部分的點云坐標是完全一致的。但是由于存在安置角誤差、偏心距誤差和測距誤差,使得不同航帶下同名點的坐標也會存在差異,如圖1所示。
如圖1所示,在航帶A和航帶B上分別掃描獲取地面上P點信息,2條航帶的飛行高度為H,航帶間的直線距離為D。航帶A沿x軸正方向飛行,此時掃描角為θA,無人機在地面上的投影與測點之間的橫向距離為yA;航帶B沿x軸反方向飛行,此時掃描角為θB,無人機在地面上的投影與測點之間的橫向距離為yB。此時,存在以下關系式
當無人機的飛行高度較低、掃描角范圍較小時,可以認為
此時,同名點的三維坐標差異可表示為
。
根據同名點的三維坐標差異表達式可知,A航帶中激光點的三維坐標,可以用B航帶中對應同名點的坐標進行表示,轉換過程如圖2所示。
在無人機的航測過程中,重疊航帶同名點的高程差異來自于無人機的旋轉角度(ψ),平面差異則受到了航帶間距D和飛行高度H的共同影響[2]。如果2條航帶的重疊率達到了100%,則上述同名點的三維坐標差異表達式可簡化為
。
1.2 "基于ICP算法的航帶點云配準
通過平行重疊航帶差異檢測校正無人機激光掃描測繪系統誤差時,相鄰2條航帶之間的點云配準和平差參數計算是2個關鍵步驟。點云配準的精度會影響平差參數的精確性,進而決定了原始誤差解算結果的精確性。現階段常用的點云配準算法有主曲率算法、隨機采樣一致性算法等若干種。本文在系統誤差校驗中,選用了ICP算法進行航帶點云配準,其優勢在于算法流程簡單、收斂精度較高,可以更好地滿足點云配準以及誤差解算的需要。
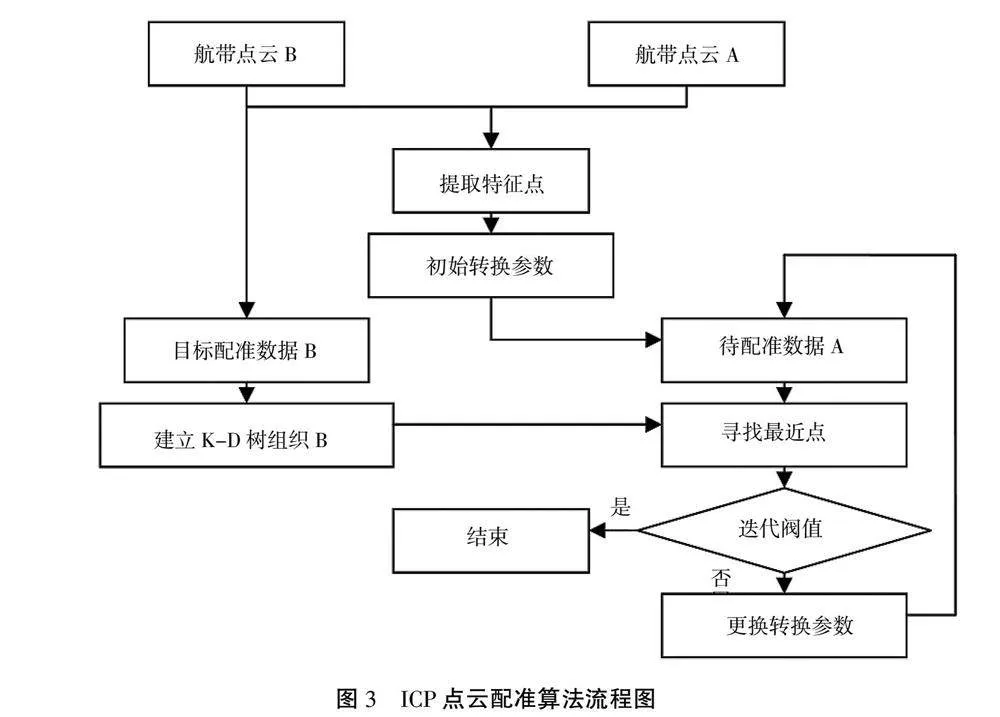
考慮到目前無人機搭載的三維激光掃描儀采集效率較高、數據量較大,為了提高點云配準的效率與質量,本文在原始ICP算法上做如下改進:①在待測地面上人為布置若干特征點(如黑白標靶),方便提取特征,矯正匹配點;②在檢索最近點時,首先使用K-D樹組織待配準的點云,在點與點之間建立拓撲關系,然后再開始檢索,可以大幅度提高檢索效率;③在實際作業中,航帶重疊度不可能達到100%。因此,航帶中的點云只有部分重疊,需要手動篩除非重疊點云,減少數據量和減輕配準工作量[3]。完成上述工作后,使用改進的ICP算法進行點云配準,流程如圖3所示。
2 "無人機激光掃描測繪系統誤差模型檢校實驗
2.1 "實驗設計
本實驗選用曜宇Long120六旋翼無人機,軸距1.6 m,最大載荷8 kg,空載飛行時間120 min,搭載北科天繪云雀激光掃描測繪系統,最大探測距離1 500 m,測距精度10 mm@100 m,高程測量精度±5 cm,具有多次回波。該激光掃描測繪系統由激光掃描儀、組合慣性單元(IMU、GNSS)和數字相機組成。為保證系統的穩定可靠,將所有設備封裝在一個長方體中,固定在無人機下方。無人機在航測過程中收集到的海量掃描數據,存儲在專用SSD中,由地面站應用軟件完成對原始點云數據的處理,包括前期的降噪、濾波和后期的點云配準、影像數據融合等[4]。處理結果在OpenGL三維顯示器上進行可視化呈現。
將某建筑物樓頂作為本次實驗場地,為了獲取點云特征和增加點云配準精度,在實驗現場放置了2個尺寸為100 cm×40 cm×50 cm的箱子作為標志物。在建筑樓頂搭建了模擬飛行平臺,保證GNSS信號的收發質量。設定無人機的模擬飛行高度為10 m,平移距離1.6 m。規劃航線為自東向西正向和反向分別掃描4次。
2.2 "實驗結果與分析
無人機沿著x軸分別完成正方向和負方向的航測后,共采集到170 445個激光點。橫滾角的波動范圍±0.3°,俯仰角的變化范圍±0.2°,對航測數據的可用性不構成影響,可以忽略不計。由于地面布置了2個特征點,因此所得的掃描數據中存在2片大面積重疊的點云,特征較為明顯,為ICP點云配準創造了有利條件。另外,在原本平坦的樓頂,點云圖的顏色呈現出深淺不一的現象,由于顏色深淺代表了高程變化,說明測繪結果中樓頂各處的高程不一致,與實際情況不符,表明本實驗使用的無人機激光掃描測繪系統存在誤差[5]。使用改進的ICP算法對2種航跡下的點云進行配準后,可以求得航帶平差。在此基礎上分別對反向部分重疊航帶、反向完全重疊航帶的多次掃描點云數據進行配準,得到三維坐標誤差(ΔX,ΔY,ΔZ)、安置角誤差(φ,κ)和旋轉角度(ψ)的8組參數,見表1。
以點云配準后得到的平差參數作為輸入量,輸入到差異分析模型中,可以輸出原始系統的參數誤差,見表2。
將差異分析模型的解算結果補償到無人機激光掃描測繪系統中,更新原始數據后重新生成新的點云圖。對比初始點云圖和校準后的新點云圖,可以發現2幅圖中不同方向航帶點云的顏色深淺一致,說明高程差被消除,達到了校正無人機激光掃描系統誤差的效果。
3 "結束語
無人機激光掃描測繪系統的定位精度受到多方面因素的影響,如測繪距離、飛行姿態、掃描角誤差、GNSS定位誤差等。當誤差較大時,會導致最終呈現出來的三維地表信息局部丟失或失真,參考價值也會大打折扣。因此,為了保證三維點云坐標的精確性和三維地表信息的真實性,必須要盡可能地減小甚至是消除誤差。基于航帶平差的模型校驗技術,選取影響系統精度的誤差源構建了差異分析模型,然后使用ICP算法進行航帶點云配準,將配準后的平差參數輸入到建立的模型中進行解算,用解算結果補償系統,使得系統誤差得以校正,掃描測繪精度也得到了進一步的提升。
參考文獻:
[1] 湯立坤.無人機三維激光掃描技術在礦區巖移數據測量中的應用[J].價值工程,2023(25):85-87.
[2] 丁志廣,饒帥雄,王田芳.激光掃描與無人機空地一體融合測量應用[J].測繪通報,2023(1):179-183.
[3] 厲彥一.適用于測繪四旋翼無人機的模糊PID控制算法及仿真[J].測繪通報,2020(18):61-63.
[4] 張永明.輕小型無人機遙感定位系統誤差消除技術研究[J].計算機測量與控制,2021(5):234-236.
[5] 孫貴平.無人機空中激光掃描測繪系統的設計與實現分析[J].現代測繪工程,2020(10):26-28.