基于均勻掃描和專注引導策略的自主探索算法
2024-12-31 00:00:00申偉霖陳薈慧關柏良王愛國楊健茂
計算機應用研究 2024年11期


摘 要:為解決機器人難以快速探索含有狹窄入口的未知環境,以及在探索收益接近的目標之間徘徊探索而導致探索效率降低的問題,提出一種包含均勻掃描和專注引導策略的自主探索算法USAGE。USAGE采用均勻掃描的方式檢測地圖的邊界點,并對邊界點進行聚類得到待探索點。最后通過專注引導策略確定最優探索目標,在含有信息增益和路徑代價的傳統評價函數中引入轉向代價評估指標,并根據機器人的狀態約束探索任務執行,引導機器人專注探索。通過在機器人操作系統搭建仿真環境進行驗證,實驗結果表明,與基于快速探索隨機樹(rapidly-exploring random tree,RRT)的探索算法相比,USAGE占用系統內存減少了11.34%以上,在探索耗時和探索距離方面分別減小了26.90%和31.94%,提升了自主探索效率。
關鍵詞:機器人; 自主探索; 邊界點; 評價函數; 機器人操作系統
中圖分類號:TP242.6 文獻標志碼:A
文章編號:1001-3695(2024)11-031-3415-05
doi:10.19734/j.issn.1001-3695.2024.02.0074
Autonomous exploration algorithm based on uniform scanning and attentive guidance explorer
Shen Weilina, Chen Huihuib?, Guan Boliangb, Wang Aiguob, Yang Jianmaob
(a. School of Electromechanical Engineering amp; Automation, b. School of Electronic amp; Information Engineering," Foshan" University," Foshan" Guangdong 528225," China)
Abstract:To solve the problem of difficulty for robots to quickly explore unknown environments with narrow entrances, as well as the decrease in exploration efficiency caused by wandering between targets with close exploration benefits, this paper proposed a self-exploration algorithm USAGE (uniformly scanning and attentive guidance explorer) , which included uniform scanning and attentive guidance strategy. USAGE used the uniform scanning method to detect boundary points, and clustered the boundary points to obtain the points to be explored, and finally determined the optimal exploration target through an attentive guidance strategy. This strategy introduced the steering cost evaluation index into the traditional evaluation function containing information gain and path cost, and constrained the execution of the exploration task according to the robot’s state, and guided the robot to focus on exploration. Through building a simulation environment in the robot operating system for verification, the experimental results show that compared with the exploration algorithm based on rapidly-exploring random tree (RRT) , USAGE occupies less system memory by more than 11.34%, reduces the exploration time and exploration path level by 26.90% and 31.94% respectively, which improves autonomous exploration efficiency.
Key words:robot; autonomous exploration; boundary point; evaluation function; robot operating system
0 引言
機器人自主探索是機器人領域的重要研究方向。具備自主探索能力的機器人能夠在無人干預的情況下主動探索未知環境并繪制地圖,廣泛應用在警用反恐[1]、災難救援[2]、采礦任務[3]以及日常生活中[4]。
機器人通過即時定位與地圖構建(simultaneous localization and mapping,SLAM)技術實現在運動的同時繪制地圖。機器人在自主探索程序的引導下,在未知環境中自主規劃路徑和探索,從而繪制出整個未知環境的地圖。自主探索的過程可以看作是機器人不斷尋找探索目標并朝目標行進的過程,因此如何尋找探索目標以及選擇怎樣的探索目標去探索,進而實現機器人在陌生環境中快速、精準地構建完整的全局地圖是自主探索算法的主要優化目標。
在機器人自主探索的研究中,Yamauchi[5]首次提出了基于邊界的自主探索算法,將地圖中空閑空間與未知空間的交界定義為邊界,該算法通過邊緣檢測技術提取地圖邊界并在距離機器人最近的邊界中得到探索目標。文獻[6,7]改進了邊界提取模塊,只處理最新獲取的激光掃描數據,而不是處理整個地圖,通過減少源數據的方式降低了處理時間。Umari等人[8]提出了應用快速探索隨機樹(rapidly-exploring random tree, RRT)檢測邊界點,并設計全局RRT邊界點檢測器和局部RRT邊界點檢測器共同檢測地圖中的邊界點。
RRT是一種樹型數據存儲結構和算法,結構簡單,具有概率完備的特性,但RRT容易在已探索過的空間重復探索,造成邊界點檢測性能降低。針對RRT檢測邊界點存在效率低的問題,文獻[9,10]改進了傳統RRT的生長速率,利用可變生長率的全局RRT加速擴展,從而提高邊界點檢測的效率。Sumer等人[11]提出了利用三種RRT共同檢測邊界點,在文獻[8]的基礎上優化了局部RRT的重置條件,當局部RRT檢測到邊界點或生長次數到達預先定義次數時重置,解決傳統RRT在已探索區域重復探索導致生長被困的問題。此外,在最新刪除的邊界點處構造臨時RRT,用于加快檢測地圖更新區域附近的邊界點,提高了邊界點檢測性能。這些基于RRT的邊界點檢測算法的改進在一定程度上提高了算法性能,但是RRT的生長方式具有隨機性,難以快速檢測轉角、長廊等復雜空間的邊界點,導致機器人不能及時發現其附近的邊界點,在未探索完全的情況下離開原地而前往其他地方探索或由于無探索目標而停在原地,造成自主探索的效率降低。
在自主探索的過程中,選擇優質的邊界點作為探索目標是實現機器人高效探索的關鍵,直接影響探索任務的執行效果。探索目標選擇方法包括基于機器人移動方向[12]、基于距離[5]和基于評價函數[13~17]等,傳統的評價函數綜合考慮邊界點的信息增益和路徑代價并計算探索收益,探索收益最大的邊界點被定為探索目標。傳統的探索目標選擇方法存在以下兩個方面的不足:a)傳統的評價函數只有路徑代價和信息增益兩個評價指標,距離遠但信息增益大的邊界點可能被選為探索目標;b)是直接將探索收益最大的邊界點作為探索目標,忽略了探索收益大的程度,當存在多個邊界點且它們之間的探索收益差值較小時,機器人可能會頻繁改變探索目標,造成徘徊式探索,降低了探索效率。
針對機器人快速探索存在狹窄入口的未知環境和減少徘徊式探索的需求,本文提出包含均勻掃描和專注引導策略的自主探索算法(uniformly scanning and attentive guidance explorer,USAGE)。USAGE采用均勻采樣的邊界點檢測算法和專注引導策略分別解決邊界點檢測問題和探索目標優選問題,實現快速、全面檢測地圖中的邊界點,以及根據機器人的狀態加入約束條件,優選得到探索目標,引導機器人探索未知環境,減少機器人徘徊,提高機器人探索效率和精確率。
1 USAGE算法
1.1 自主探索系統框架
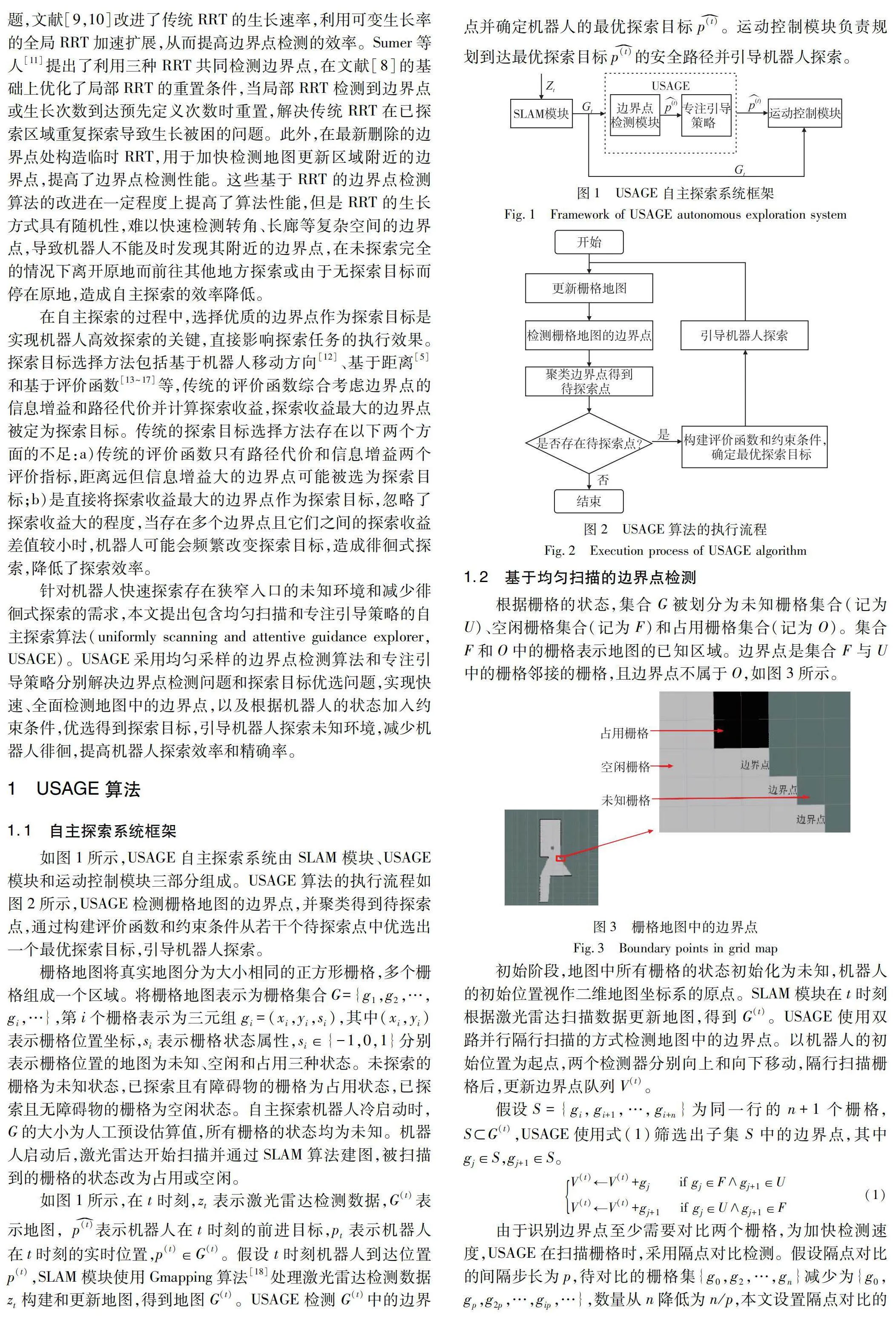
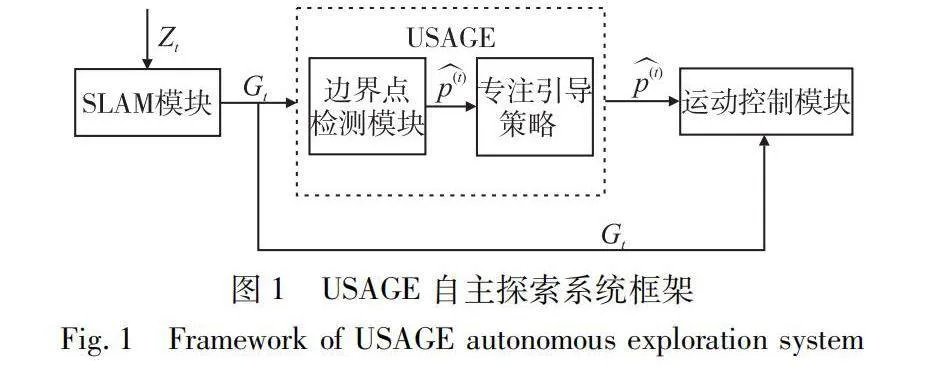
如圖1所示,USAGE自主探索系統由SLAM模塊、USAGE模塊和運動控制模塊三部分組成。USAGE算法的執行流程如圖2所示,USAGE檢測柵格地圖的邊界點,并聚類得到待探索點,通過構建評價函數和約束條件從若干個待探索點中優選出一個最優探索目標,引導機器人探索。
柵格地圖將真實地圖分為大小相同的正方形柵格,多個柵格組成一個區域。將柵格地圖表示為柵格集合G={g1,g2,…,gi,…},第i個柵格表示為三元組gi=(xi,yi,si),其中(xi,yi)表示柵格位置坐標,si表示柵格狀態屬性,si∈{-1,0,1}分別表示柵格位置的地圖為未知、空閑和占用三種狀態。未探索的柵格為未知狀態,已探索且有障礙物的柵格為占用狀態,已探索且無障礙物的柵格為空閑狀態。自主探索機器人冷啟動時,G的大小為人工預設估算值,所有柵格的狀態均為未知。機器人啟動后,激光雷達開始掃描并通過SLAM算法建圖,被掃描到的柵格的狀態改為占用或空閑。
如圖1所示,在t時刻,zt表示激光雷達檢測數據,G(t)表示地圖," p(t)^表示機器人在t時刻的前進目標,pt表示機器人在t時刻的實時位置,p(t)∈G(t)。假設t時刻機器人到達位置p(t),SLAM模塊使用Gmapping算法[18]處理激光雷達檢測數據zt構建和更新地圖,得到地圖G(t)。USAGE檢測G(t)中的邊界點并確定機器人的最優探索目標p(t)^。運動控制模塊負責規劃到達最優探索目標p(t)^的安全路徑并引導機器人探索。
1.2 基于均勻掃描的邊界點檢測
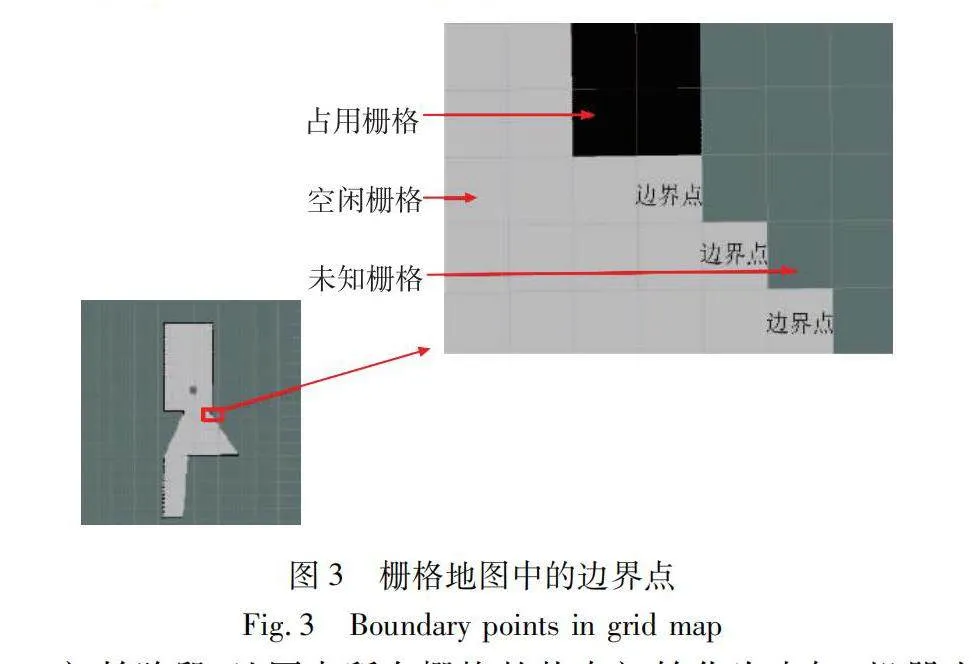
根據柵格的狀態,集合G被劃分為未知柵格集合(記為U)、空閑柵格集合(記為F)和占用柵格集合(記為O)。集合F和O中的柵格表示地圖的已知區域。邊界點是集合F與U中的柵格鄰接的柵格,且邊界點不屬于O,如圖3所示。
初始階段,地圖中所有柵格的狀態初始化為未知,機器人的初始位置視作二維地圖坐標系的原點。SLAM模塊在t時刻根據激光雷達掃描數據更新地圖,得到G(t)。USAGE使用雙路并行隔行掃描的方式檢測地圖中的邊界點。以機器人的初始位置為起點,兩個檢測器分別向上和向下移動,隔行掃描柵格后,更新邊界點隊列V(t)。
假設S={gi,gi+1,…,gi+n}為同一行的n+1個柵格,SG(t),USAGE使用式(1)篩選出子集S中的邊界點,其中gj∈S,gj+1∈S。
V(t)←V(t)+gj
if gj∈F∧gj+1∈UV(t)←V(t)+gj+1 if gj∈U∧gj+1∈F(1)
由于識別邊界點至少需要對比兩個柵格,為加快檢測速度,USAGE在掃描柵格時,采用隔點對比檢測。假設隔點對比的間隔步長為p,待對比的柵格集{g0,g2,…,gn}減少為{g0,gp,g2p,…,gip,…},數量從n降低為n/p,本文設置隔點對比的間隔步長p為機器人模型的外接圓半徑。每次對比柵格gip的狀態和g(i+1)p及g(i+1)p上鄰域柵格的狀態,當兩個柵格(gip和g(i+1)p或者gip和g(i+1)p上鄰域柵格)的關系滿足式(2)時,截取柵格子集S,并使用式(1)檢測邊界點。
S←gip,…,g(i+1)p,ifgip∈F∧g(i+1)p∈Ugip∈U∧g(i+1)p∈F(2)
1.3 基于專注引導策略的探索目標選擇
被探索的區域內環境越復雜,邊界點也越多,找到最優探索目標也就越困難。傳統的探索目標選擇方法是通過含有信息增益和路徑代價的評價函數計算邊界點的探索收益,然后選擇探索收益最大的邊界點作為探索目標。為解決傳統的探索目標優選策略難以在探索收益接近的邊界點中擇優,導致探索目標頻繁改變的問題,USAGE采用專注引導策略約束機器人執行探索任務。專注引導策略首先對已檢測到的邊界點進行聚類,得到待探索點,然后在含有信息增益和路徑代價的傳統評價函數基礎上引入機器人姿態評估待探索點的探索收益,最后增加距離和探索收益差值約束進行探索目標擇優。專注引導策略的執行過程包括邊界點聚類、探索收益評估和探索目標選擇三個步驟。
1.3.1 邊界點聚類
邊界點檢測模塊的檢測速度快,檢測出大量邊界點,且部分邊界點聚集分布在柵格地圖中。為了減少邊界點數量,提高計算效率,USAGE通過mean shift聚類[19]算法對已檢測到的邊界點進行均值聚類處理,使用聚類中心點表征該中心點周圍近距離的邊界點,從而達到減少邊界點數量,降低計算開銷的目的。
假設邊界點檢測模塊共檢測到n個二維邊界點x1,x2,…,xn,則邊界點x的mean shift向量的表示形式為
Mh(x)=1k∑xi∈Sh(xi-x)(3)
其中:Sh是以點x為圓點,半徑為h的圓形區域,k為區域Sh內數據點的數量。上式為聚類算法的一次迭代過程,求解Sh內的k個向量相對于向量x的偏移均值,向量Mh(x)的方向指向數據點分布密集的區域,每次迭代后,數據點x會往向量Mh(x)方向移動,移動距離為‖Mh(x)‖,并把區域Sh內的其他點標記為同一類。
USAGE通過mean shift算法對大量邊界點進行均值聚類,得到多個類的中心點。聚類后,簇的中心點視為待探索點,探索目標會在待探索點中擇優得到。如果待探索點的數量只有1個,則直接將該待探索點作為探索目標,引導機器人進行探索;如果存在多個待探索點,則通過探索收益評估和探索目標約束進行擇優得到探索目標。
1.3.2 探索收益評估
探索收益評估指對每個待探索點使用評價函數計算它的探索收益。評價函數包括信息增益、路徑代價和轉向代價三個評價指標。
a)信息增益表示為I(p, r),指待探索點p周圍未知區域面積的大小,即以p為圓心、用戶定義的信息增益半徑r的圓內未知柵格的數量。
b) 路徑代價表示為N(p),指機器人從當前位置到待探索點p的歐氏距離。為了消除評價函數中不同評估指標之間的量綱影響,對N(p)進行歸一化處理得到歸一化路徑代價(p),如式(4)所示。
(p)=N(p)Nmax(4)
其中:Nmax是N(p)的最大值,即最遠待探索點的歐氏距離。
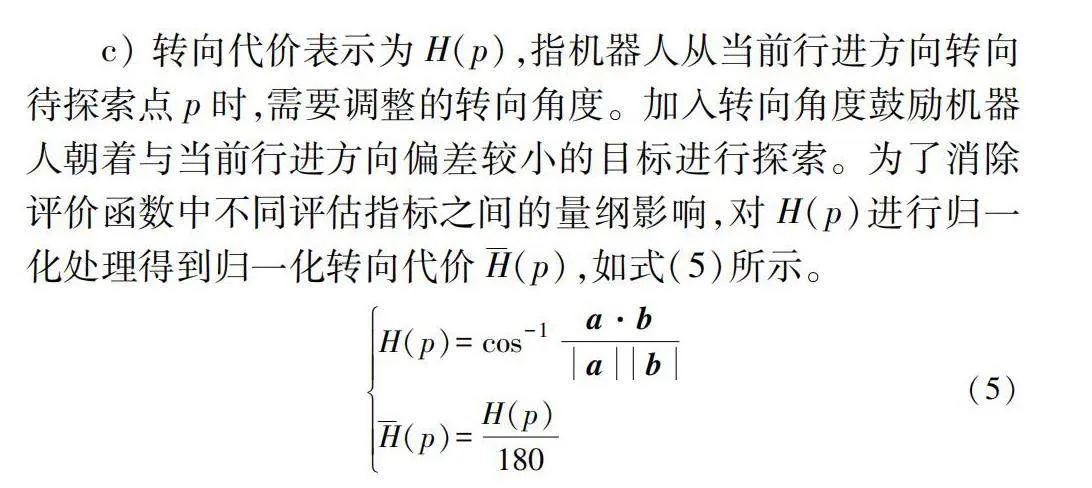
c) 轉向代價表示為H(p),指機器人從當前行進方向轉向待探索點p時,需要調整的轉向角度。加入轉向角度鼓勵機器人朝著與當前行進方向偏差較小的目標進行探索。為了消除評價函數中不同評估指標之間的量綱影響,對H(p)進行歸一化處理得到歸一化轉向代價(p),如式(5)所示。
H(p)=cos-1a·b|a||b|(p)=H(p)180(5)
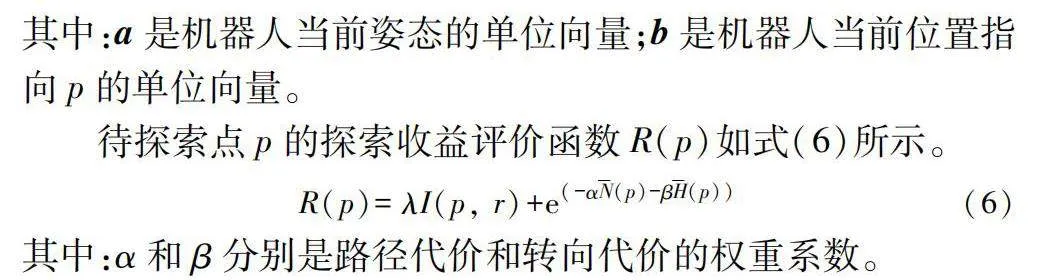
其中:a是機器人當前姿態的單位向量;b是機器人當前位置指向p的單位向量。
待探索點p的探索收益評價函數R(p)如式(6)所示。
R(p)=λI(p, r)+e(-α(p)-β(p))(6)
其中:α和β分別是路徑代價和轉向代價的權重系數。
為鼓勵機器人優先對近距離的目標進行探索,引入權重系數λ。λ的計算如式(7)(8)所示。
λ=A(N(p)) if N(p)≤D1if N(p)gt;D(7)
A(N(p))=2×DN(p)(8)
其中:D是用戶定義的距離閾值。
1.3.3 探索目標選擇
為降低機器人在探索收益接近的待探索點之間頻繁執行探索任務的可能性,USAGE根據機器人的狀態對探索目標選擇方式進行約束,分為如下三個步驟:
a)計算所有待探索點p的探索收益R(p),得到探索收益最大的待探索點p*。
b)獲取機器人當前位置p(t)r和機器人正在探索的目標位置p(t)^,并計算p(t)r與p(t)^的距離l(t)r。當l(t)r≤D時,將探索收益最大的待探索點p*作為新的探索目標p(t+1)^;當l(t)rgt;D,則執行步驟c)。
c)定義探索收益差值閾值Rr,通過Rr對比p*與p(t)^的探索收益差值,作用是判斷p*和p(t)^探索收益的偏差程度,評估探索目標改變的必要性,實現機器人專注探索,解決探索收益接近的探索目標導致機器人徘徊探索的問題。新的探索目標p(t+1)^選擇方式如式(9)所示。
p(t+1)^=p* if (R(p*)-R(p(t)^))gt; Rrp(t)^ other(9)
2 實驗
2.1 實驗設置
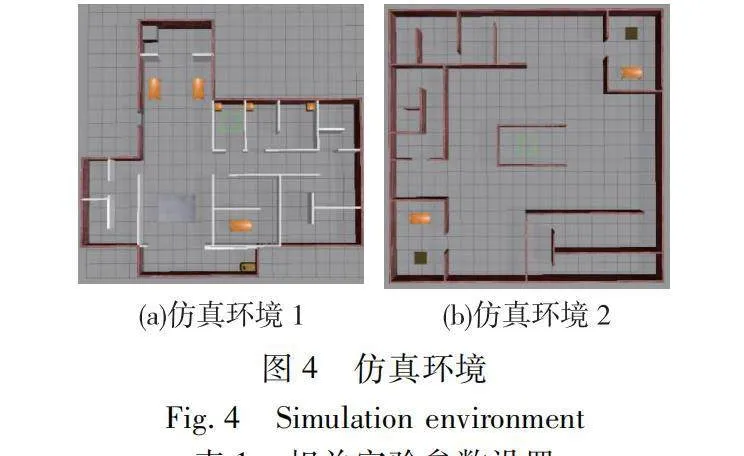
為驗證USAGE探索算法的有效性,本文利用仿真器Gazebo搭建室內場景仿真環境1和2進行實驗,仿真環境的面積分別為220 m2和400 m2,如圖4所示。實驗所用的機器人的物理尺寸為0.28×0.31×0.15(m3),機器人運動底盤采用兩輪差速驅動,不允許倒車,機器人搭載的激光雷達的最遠掃描距離為10 m,掃描范圍為-180°~180°。
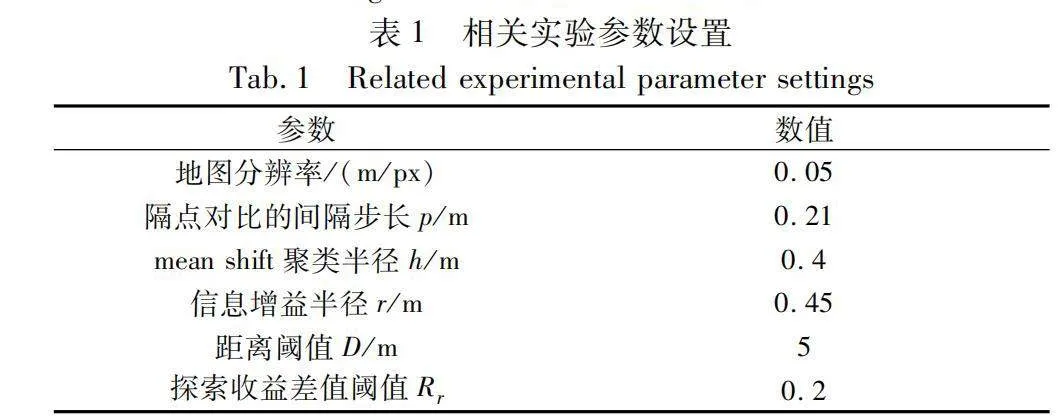
本文設置了28組共280次實驗,包括10組自我測評實驗和18組基準算法對比實驗。自我測評實驗是根據USAGE算法中探索目標優選中評價函數的不同權重配置(路徑代價權重α和轉向代價權重β)在兩個仿真環境中進行實驗。基準算法對比實驗是在相同的實驗條件下對比RRT探索算法[8]和文獻[11]探索算法。為避免實驗數據的偶然性,每組實驗進行10次重復實驗并記錄相關數據,機器人的初始位置設置在環境中間綠色方框中心點處。相關實驗參數設置如表1所示。
2.2 自我測評實驗結果
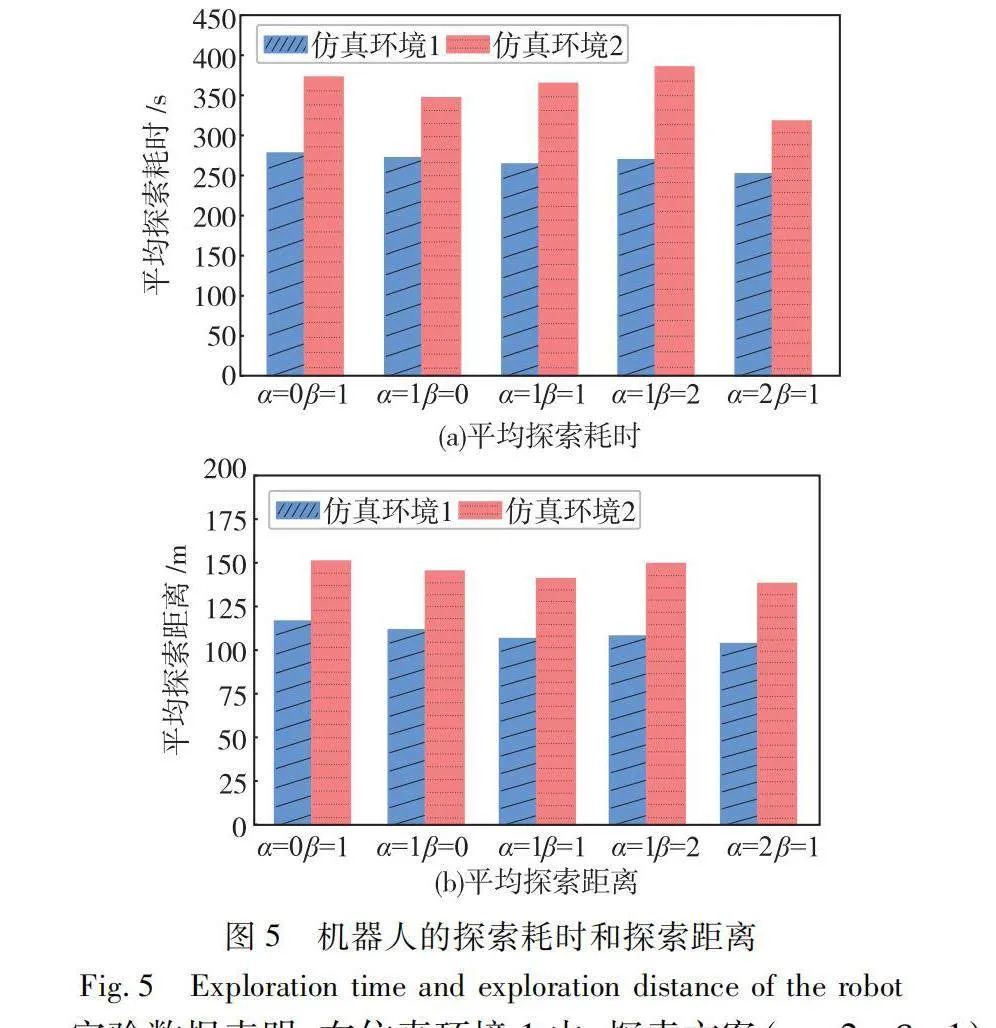
為探究USAGE中的評價函數中不同權重配置(路徑代價權重α和轉向代價權重β)對探索效率的影響,本文根據不同的權重配置設置了5組探索方案,設置機器人的最大線速度為0.5 m/s,分別在仿真環境1和2中進行實驗,記錄機器人的平均探索耗時和平均探索距離,實驗數據如圖5所示。
實驗數據表明:在仿真環境1中,探索方案(α=2, β=1)的探索效率最高,與只考慮路徑代價的探索方案(α=1, β=0)相比,平均探索耗時和距離分別減小了7.28%和7.37%;與只考慮轉向代價的探索方案(α=0, β=1)相比,平均探索耗時和距離分別減小了9.58%和12.34%。這表明不同的路徑代價和轉向代價權重比例對探索效率有一定的影響,只考慮路徑代價或轉向代價的探索方案的探索效率低于其他探索方案,綜合考慮路徑代價和轉向代價可以提高機器人自主探索的效率。在仿真環境2中,探索方案(α=2, β=1)的效率最高,與探索效率最低的探索方案(α=1, β=2)相比,平均探索耗時和距離分別減小了17.64%和9.53%,這表明在大場景地圖中,路徑代價是影響機器人自主探索效率的關鍵因素。
2.3 基準算法對比實驗結果
在基準算法對比實驗中,設置機器人的最大線速度為0.5 m/s,本文采用探索方案(α=2, β=1)的USAGE算法與RRT探索算法[8]和文獻[11]進行對比。
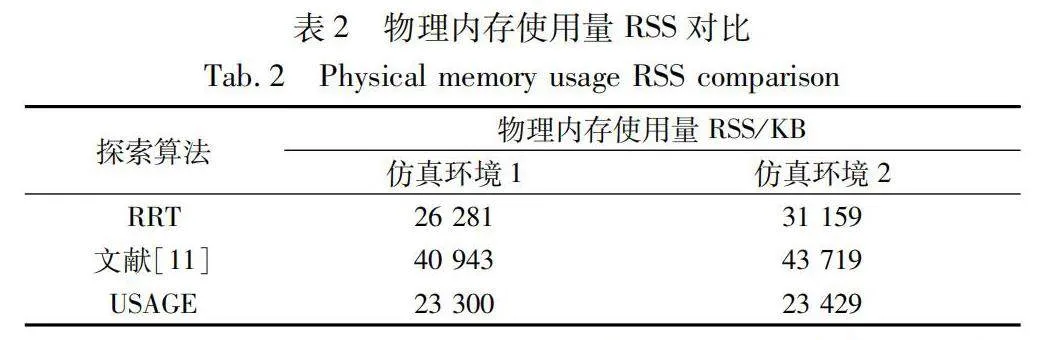
本文使用top命令查看系統內存占用率,對比不同探索算法中的邊界點檢測模塊的物理內存使用量(resident set size,RSS),實驗數據如表2所示。
表2表明:USAGE與RRT和文獻[11]相比,在仿真環境1中,RSS分別減小了11.34%和43.09%,在仿真環境2中,RSS分別減小了24.81%和46.41%。USAGE探索兩種環境都占用較小的系統內存,且不會大幅度變化,而RRT和文獻[11]會隨著探索的進行占用更大的內存,驗證了USAGE的邊界點檢測模塊的有效性。
為驗證USAGE的專注引導策略的有效性,本文根據不同的探索目標優選策略設置對比實驗,對比算法為融合USAGE的邊界點檢測模塊與RRT的探索目標優選策略的算法(簡稱USAGE-RRT),在相同的實驗條件下重復10次實驗,對比平均探索耗時和距離,實驗數據如表3所示。
表3表明:在仿真環境1中,USAGE與USAGE-RRT相比,其在平均探索耗時和距離方面分別減小了8.81%和9.43%。在仿真環境2中,USAGE與USAGE-RRT相比,其在平均探索耗時和距離方面分別減小了9.33%和7.35%。采用專注引導策略的探索方案可以提高探索效率,驗證了USAGE的專注引導策略的有效性。
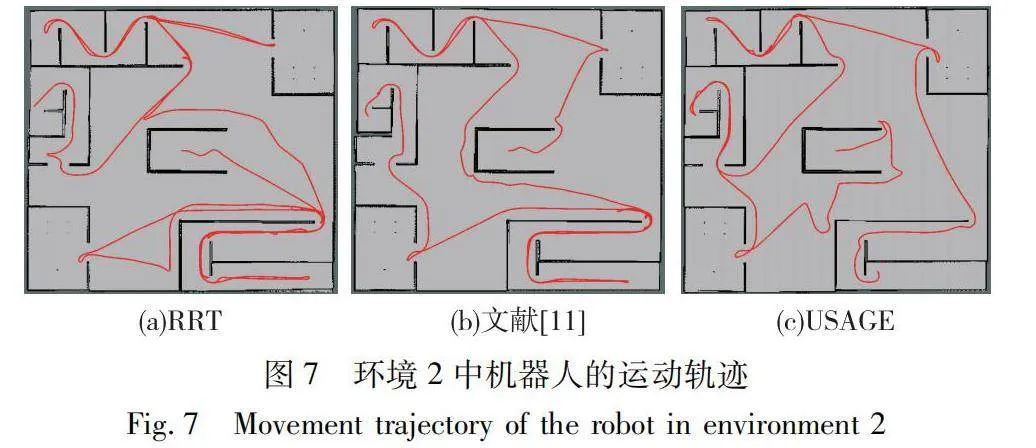
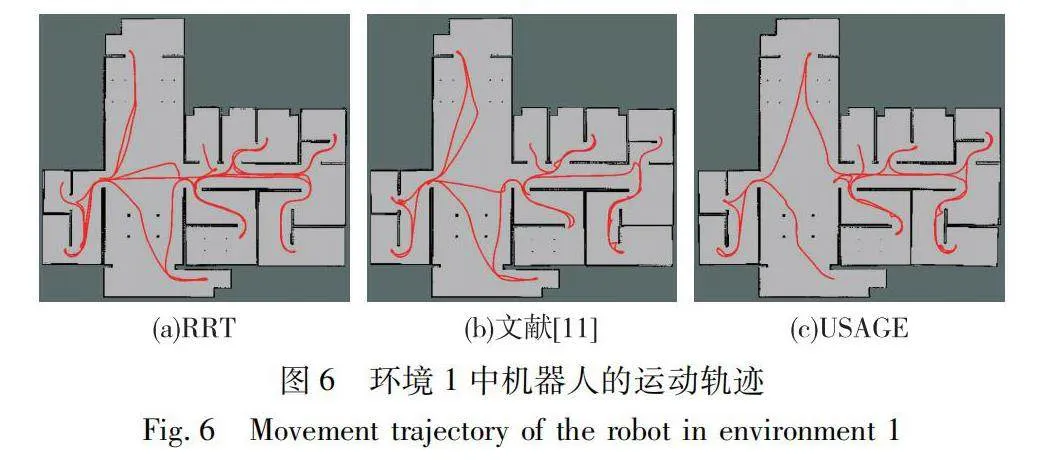
為驗證USAGE可以實現機器人減小在相同路徑中重復探索的可能性,本文在相同的實驗條件下對比機器人探索仿真環境1和2的運動軌跡,從圖6和7的實驗結果可以看出USAGE的運動軌跡更加平滑,且行駛的路徑長度更短,這表明USAGE能夠減小機器人在相同路徑探索的可能性,提高了探索效率。
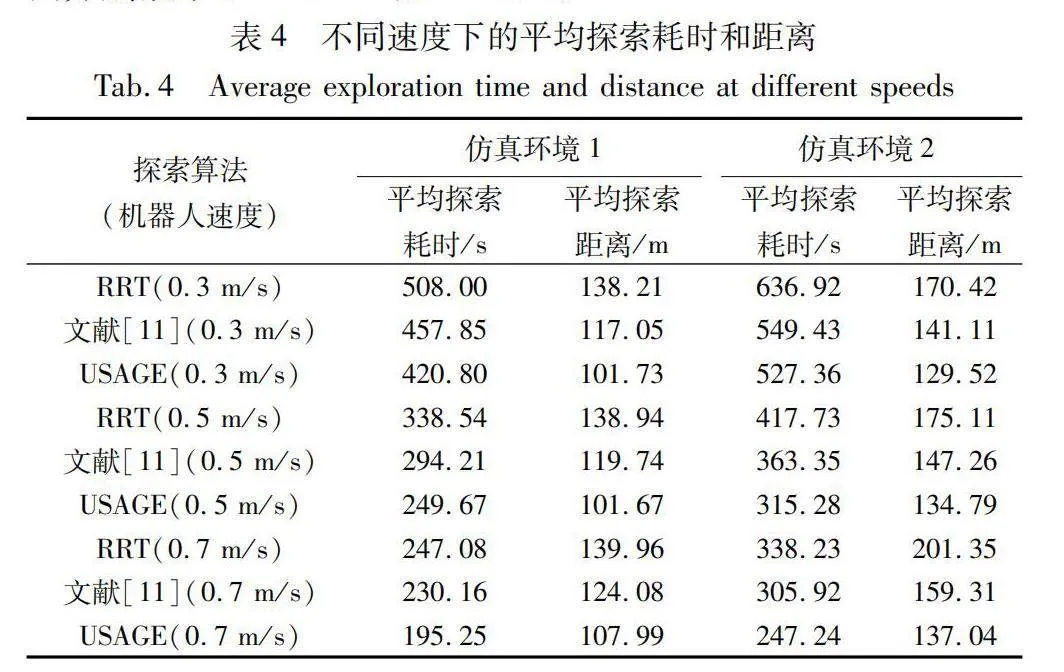
為進一步驗證USAGE的有效性,本文設置三種不同的機器人最大線速度(0.3 m/s、0.5 m/s和0.7 m/s)對比實驗,從探索耗時和探索距離兩個方面評估探索算法的優劣,實驗結果如表4所示。表4表明:在仿真環境1中,USAGE(0.5 m/s)的探索效率最高,相對RRT(0.5 m/s)在平均探索耗時和距離方面分別減小了26.25%和26.82%;相對文獻[11](0.5 m/s)在平均探索耗時和距離方面分別減小了15.14%和15.09%。在仿真環境2中,USAGE(0.7 m/s)的探索效率最高,相對RRT(0.7 m/s)在平均探索耗時和距離方面分別減小了26.90%和31.94%;相對文獻[11](0.7 m/s)在平均探索耗時和距離方面分別減小了19.18%和13.98%。
綜上所述,本文提出的USAGE自主探索算法在一定程度上加快了邊界點檢測速度和減小機器人探索重復路徑的可能性,使機器人探索未知環境花費更少的時間和行駛更短的距離,提高了機器人自主探索的效率。此外,USAGE實現自主探索占用較小的系統內存,在嵌入式設備部署方面具有一定的優勢。
3 結束語
本文提出了一種高效率的自主探索算法USAGE。與基于快速探索隨機樹的探索算法相比,USAGE占用系統內存更小,且占用的內存不會隨著探索的進行而大幅度增大,使USAGE更適用于資源受限的探索機器人。此外,USAGE在不同的機器人探索速度探索不同復雜程度的環境都體現出較好的探索性能,實現自主探索花費更少的時間和行駛更短的距離,提升了自主探索效率。
本文算法采用單個機器人進行自主探索建圖,未來將研究多機器人協作完成自主探索,提供多機器人協作探索構建室內環境地圖的解決方案。
參考文獻:
[1]陳曉東. 警用與反恐機器人的現狀與趨勢 [J]. 機器人技術與應用, 2015 (6): 31-33. (Chen Xiaodong. Present situation and trend of police and anti-terrorist robot [J]. Robot Technique and Application, 2015 (6): 31-33.)
[2]Delmerico J, Mueggler E, Nitsch J, et al.Active autonomous aerial exploration for ground robot path planning [J]. IEEE Robotics and Automation Letters, 2017, 2 (2): 664-671.
[3]朱華, 由韶澤. 新型煤礦救援機器人研發與實驗 [J]. 煤炭學報, 2020, 45 (6): 2170-2181. (Zhu Hua, You Shaoze, Research and experience of a new type of coal mine rescue robot [J]. Journal of China Coal Society, 2020, 45 (6): 2170-2181.)
[4]趙雅婷, 趙韓, 梁昌勇, 等. 養老服務機器人現狀及其發展建議 [J]. 機械工程學報, 2019,55 (23): 13-24. (Zhao Yating, Zhao Han, Liang Changyong, et al.Current situation and development suggestions of old-age service robot [J]. Journal of Mechanical Engineering, 2019, 55 (23): 13-24.)
[5]Yamauchi B. A frontier-based approach for autonomous exploration [C]// Proc of IEEE International Symposium on Computational Intelligence in Robotics and Automation. Piscataway,NJ: IEEE Press, 1997: 146-151.
[6]Keidar M, Kaminka G A. Robot exploration with fast frontier detection: theory and experiments [C]// Proc of the 11th International Conference on Autonomous Agents and Multiagent Systems. New York: ACM Press, 2012: 113-120.
[7]Senarathne P, Wang Danwei. Incremental algorithms for safe and reachable frontier detection for robot exploration [J]. Robotics and Autonomous Systems, 2015, 72: 189-206.
[8]Umari H, Mukhopadhyay S. Autonomous robotic exploration based on multiple rapidly-exploring randomized trees [C]// Proc of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway,NJ:IEEE Press, 2017: 1396-1402.
[9]楊儻月, 汪秀忠, 陳自豪, 等. 基于改進RRT算法的機器人自主環境探測 [J]. 信息技術, 2019, 43 (12): 20-23, 28. (Yang Tangyue, Wang Xiuzhong, Chen Zihao, et al.Autonomous robotic exploration based on improved rapidly-exploring random tree [J]. Information Technology, 2019, 43 (12): 20-23, 28.)
[10]齊立哲, 何東東, 陳騫, 等. 基于拓撲地圖的移動機器人室內環境高效自主探索算法 [J]. 機器人, 2023, 45 (3): 313-320. (Qi Lizhe, He Dongdong, Chen Qian, et al.An efcient autonomous exploration algorithm of indoor environment for mobile robots using topological map [J]. Robot, 2023, 45 (3): 313-320.)
[11]Sumer E,Temeltas H. RRT based frontier point detection for 2D autonomous exploration [C]// Proc of International Conference on Robotics and Automation Engineering. Piscataway,NJ:IEEE Press, 2022: 305-311.
[12]Mei Yongguo, Lu Y H, Lee C S G, et al.Energy-efficient mobile robot exploration [C]// Proc of IEEE International Conference on Robotics and Automation. Piscataway,NJ:IEEE Press, 2006: 505-511.
[13]Wu Chengyan, Lin H Y. Autonomous mobile robot exploration in unknown indoor environments based on rapidly-exploring random tree [C]// Proc of IEEE International Conference on Industrial Technology. Piscataway,NJ:IEEE Press, 2019: 1345-1350.
[14]Fang Baofu, Ding Jianfeng, Wang Zaijun. Autonomous robotic exploration based on frontier point optimization and multistep path planning [J]. IEEE Access, 2019, 7: 46104-46113.
[15]孟祥天. 陌生環境下機器人自主建圖的研究與實現 [D]. 成都: 電子科技大學, 2020. (Meng Xiangtian. Research and implementation of robot autonomous mapping in unfamiliar environment [D]. Chengdu: University of Electronic Science and Technology of China, 2020.)
[16]周建偉. 基于多傳感器的移動機器人自主探索建圖系統的研究與實現 [D]. 南京: 南京郵電大學, 2020. (Zhou Jianwei. Research and implementation of autonomous exploration and mapping system for mobile robot based on multi-sensor [D]. Nanjing: Nanjing University of Posts and Telecommunications, 2020.)
[17]張淑珍, 馬玉祥, 侯致遠, 等. 融合波前邊緣檢測與快速搜索隨機樹的自主探索方法 [J]. 中國慣性技術學報, 2023, 31 (9): 925-931. (Zhang Shuzhen, Ma Yuxiang, Hou Zhiyuan, et al.Autono-mous exploration method for fusing wavefront frontier detection with rapidly-exploring random trees[J]. Journal of Chinese Inertial Technology, 2023, 31 (9): 925-931.)
[18]Grisetti G, Stachniss C, Burgard W. Improved techniques for grid mapping with Rao-Blackwellized particle filters [J]. IEEE Trans on Robotics, 2007, 23 (1): 34-46.
[19]Comaniciu D, Meer P. Mean shift: a robust approach toward feature space analysis [J]. IEEE Trans on Pattern Analysis and Machine Intelligence, 2002, 24 (5): 603-619.