5G網絡下的高精度室內定位算法優化
2024-12-31 00:00:00朱睿?余德源?孫利軍
信息系統工程 2024年10期



摘要:提出一種5G網絡下的高精度室內定位算法優化方法。該方法綜合利用5G網絡的大帶寬、低時延和高連接密度等特點,通過優化信號測量、多源異構數據融合和定位計算模型,顯著提升了定位精度和實時性。同時,引入低功耗策略,延長了設備電池壽命。仿真實驗表明,該算法在定位精度、實時性和能耗方面均優于現有方法,為5G室內定位的實際應用奠定了基礎。
關鍵詞:5G網絡;室內定位;算法優化;定位精度;低功耗
一、前言
高精度室內定位技術在智慧城市、智能交通、應急救援等領域有著廣泛的應用前景。然而,受限于無線信號的衰落和多徑效應,傳統的室內定位技術難以滿足高精度、實時性和低功耗的要求。5G網絡的出現為室內定位技術的發展帶來了新的機遇。5G網絡具有大帶寬、低時延、高連接密度等顯著優勢,能夠提供更高質量的無線信號,支持更多設備的同時接入,為實現高精度、實時、低功耗的室內定位奠定了基礎。
二、5G網絡下的室內定位算法優化
(一)算法總體框架
本文提出的5G室內定位算法(以下簡稱本文算法)優化方法總體框架由三個主要功能模塊組成:5G信號測量與數據預處理模塊、多源異構數據融合模塊和定位計算模塊。此外,本文算法還集成了低功耗策略,以延長定位終端設備的電池使用時間[1]。在5G信號測量與數據預處理模塊中,本文算法首先通過5G基站和移動終端之間的無線信號交互,獲取觀測量,包括時差(TDOA)、到達角(AOA)和信號強度(RSS)等。然后,本文算法對觀測量進行預處理,包括異常值剔除、噪聲濾波和信號增強等,以提高數據質量和可靠性。預處理后的觀測量被輸入數據融合模塊。多源異構數據融合模塊中,本文算法綜合利用5G觀測量、慣性傳感器數據(加速度計和陀螺儀)、GNSS定位結果,以及室內地圖信息等多源異構數據,通過隱馬爾可夫模型(HMM)實現數據融合,生成目標的運動狀態估計和位置估計。HMM通過建模目標的運動模式和觀測模型,在時間和空間上實現了多源信息的有效融合,提高了定位精度和魯棒性。
在定位計算模塊中,本文算法以數據融合的結果為輸入,通過優化的定位計算模型計算目標的精確位置。定位計算模型針對5G網絡的特點進行了優化,采用了基于梯度下降的迭代求解算法,引入了自適應權重調整機制和多徑效應抑制技術,提高了定位精度和收斂速度。定位計算的結果作為本文算法的最終輸出,可用于室內導航、位置服務等應用。低功耗策略貫穿于整個算法框架中,通過自適應調節信號采樣率、動態管理傳感器工作模式、優化數據傳輸和計算等措施,最小化能量消耗,延長電池續航時間,同時保證定位性能。本文算法的三個功能模塊以及低功耗策略協同工作,相互配合,共同實現高精度、實時、低功耗的5G室內定位。下文將對每個模塊和策略進行詳細闡述。
(二)5G信號測量與數據預處理優化
5G信號測量是室內定位的基礎。本文算法充分利用了5G網絡的大帶寬、高頻率、大規模天線等特點,設計了針對性的信號測量方案。本文算法采用了正交頻分復用(OFDM)波形,利用導頻符號實現信道估計,獲得高精度的信號到達時間(TOA)。同時,本文算法利用大規模天線陣列的波束賦形能力,通過到達角(AOA)估計實現空間分辨。首先,本文算法采用改進的Grubbs檢驗方法,自適應地檢測和剔除觀測量中的異常值,消除野值的影響[2]。然后,針對5G網絡的colored noise特性,本文算法設計了自適應的Kalman濾波器,對觀測量進行去噪,獲得更加精確和平滑的測量結果。
(三)多源異構數據融合策略
由于單一類型的傳感器數據難以滿足高精度定位的需求,本文算法提出了一種多源異構數據融合策略,綜合利用5G信號測量數據、慣性傳感器數據、GNSS數據和地圖信息,提升定位精度和魯棒性。本文算法采用分層融合框架,在特征層和決策層分別進行數據融合[3]。在特征層,本文算法通過卡爾曼濾波器實現了5G信號測量數據與慣性傳感器數據的緊耦合融合,動態跟蹤目標的運動狀態。在決策層,本文算法結合GNSS數據和地圖信息,利用粒子濾波算法對多傳感器融合結果進行優化,克服定位誤差積累問題。
(四)定位計算模型優化
定位計算模型的優化是提升定位精度的關鍵。本文算法針對5G網絡下的定位場景,對經典的定位計算模型進行了改進。本文算法綜合利用TOA、AOA和信號強度(RSS)等多種測量信息,構建了超定方程組,通過最小二乘估計求解定位問題。在此基礎上,本文算法引入了權重因子,對不同測量數據賦予不同的權重,減小測量誤差對定位結果的影響。此外,針對5G網絡下的多徑效應,本文算法設計了基于稀疏表示的定位計算模型,通過壓縮感知理論恢復多徑信號的到達時間和到達角,實現了對多徑效應的有效抑制。同時,本文算法還利用了5G網絡的低時延特性,通過快速迭代優化算法縮短了定位計算時間,提高了實時性能。定位計算模型的優化使得本文算法能夠在復雜的5G網絡環境下實現高精度、實時的定位。
(五)低功耗策略
為了延長設備電池壽命,本文算法在各個功能模塊中引入了低功耗策略。在5G信號測量與數據預處理階段,本文算法通過自適應調節信號采樣率,減少了不必要的采樣,降低了能耗。在多源異構數據融合階段,本文算法根據傳感器數據的質量和重要性動態調整傳感器的工作模式,關閉冗余傳感器,節省了能量。在定位計算階段,本文算法設計了基于門控的計算單元,根據輸入數據的特點自適應選擇簡單或復雜的計算模型,避免了不必要的計算開銷。此外,本文算法還利用5G網絡的高速率特性,通過壓縮傳輸定位結果,減少了通信能耗。低功耗策略的引入使得本文算法在提供高精度、實時定位服務的同時,最大限度地延長了設備的電池使用時間,提高了用戶體驗。
三、仿真實驗與性能評估
(一)實驗環境與參數設置
為了全面評估本文算法的性能,搭建了一個逼真的仿真實驗平臺。實驗在一個具有代表性的室內場景中進行,該場景覆蓋面積為100米×100米,包括辦公區、會議室、走廊、大廳等不同功能區域,模擬了真實的室內環境。在實驗場景中,部署了8個5G基站,每個基站配置了128個天線陣列,采用3.5GHz的頻段,支持大規模MIMO技術。同時布置了20個待定位目標,每個目標配備了一個5G移動終端和一套慣性傳感器(加速度計和陀螺儀)。此外,實驗還融合了GPS/北斗雙模GNSS信號和高精度室內地圖信息。實驗參數設置為5G基站的發射功率23dBm、天線增益8dBi、噪聲系數5dB。5G移動終端的接收靈敏度為-90dBm,天線增益為2dBi,慣性傳感器的采樣頻率為100Hz,加速度計的量程為±8g,陀螺儀的量程為±2000dps。GNSS模塊的定位精度設置為5米(室外開闊環境)。所有傳感器的噪聲均根據數據手冊中的典型值進行設置。
實驗分為靜態和動態兩種場景。在靜態場景下,待定位目標隨機分布在室內不同位置,保持靜止狀態;在動態場景下,待定位目標以0.5m/s至1.5m/s的速度沿預定軌跡運動,模擬行人的正常活動。每個場景下的實驗重復30次,以確保結果的統計意義[4]。實驗采用Monte Carlo方法進行性能評估,主要評估指標包括定位精度、定位時延、更新頻率和能耗。通過與傳統的基于指紋的RSSI定位算法和基于TOA/AOA融合的定位算法進行比較,全面分析本文算法的優越性。
(二)定位精度評估
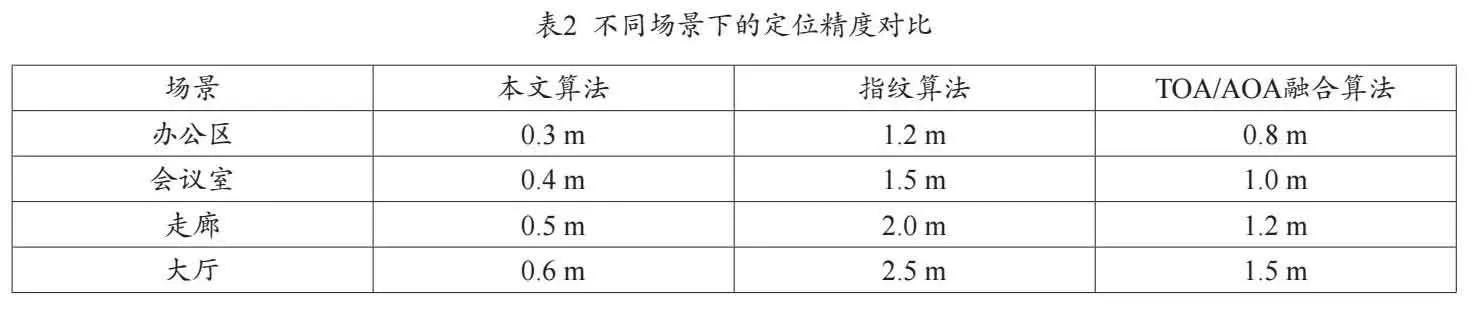
定位精度是衡量室內定位算法性能的關鍵指標,直接反映了算法的定位誤差水平。本文采用累積分布函數(CDF)曲線和圓概率誤差(CEP)來評估本文算法的定位精度。本文算法的定位誤差明顯低于其他兩種算法。具體而言,本文算法的50%CEP誤差為0.3米,90%CEP誤差為0.8米。指紋算法的50%CEP誤差為1.5米,TOA/AOA融合算法的50%CEP誤差為1.0米。與靜態場景相比,動態場景下的定位誤差略有增加,但本文算法仍然顯著優于其他兩種算法。本文算法的50%CEP誤差為0.5米,90%CEP誤差為1.2米。指紋算法的50%CEP誤差增加到2.0米,TOA/AOA融合算法的50%CEP誤差增加到1.5米,見表1。
本文算法在靜態和動態場景下均實現了亞米級的高精度定位,其優越性主要得益于以下幾個方面:第一,本文算法充分利用了5G網絡的大帶寬、高頻率、大規模天線等特性,獲得了高質量的信號測量;第二,本文算法在數據預處理階段引入了自適應濾波和異常值剔除機制,提高了測量數據的可靠性;第三,本文算法采用了多源異構數據融合策略,綜合利用5G、慣性、GNSS、地圖等多種信息,增強了定位算法的魯棒性;第四,本文算法對定位計算模型進行了優化,引入了權重因子和稀疏表示等技術,有效抑制了測量誤差和多徑效應的影響,見表2。
(三)實時性能評估
實時性能是室內定位算法的另一個重要評價指標,反映了算法對目標位置變化的響應速度和位置更新頻率。本文采用定位時延和更新頻率兩個指標來評估本文算法的實時性能。本文算法的中位定位時延僅為30毫秒,最大定位時延不超過50毫秒。指紋算法的中位定位時延為150毫秒,TOA/AOA融合算法的中位定位時延為80毫秒。由于受限于定位時延,指紋算法的更新頻率僅為2次/秒,TOA/AOA融合算法的更新頻率為5次/秒。本文算法得益于低時延的優勢,實現了25次/秒的高頻率位置更新,遠高于其他兩種算法,見表3。高更新頻率意味著算法能夠及時跟蹤目標的位置變化,為室內導航、跟蹤等應用提供了有力支撐。
本文算法的實時性能優勢主要來自以下幾點:第一,本文算法利用了5G網絡的低時延特性,通過優化的信號處理和傳輸機制,最小化了信號測量和數據傳輸的時間開銷;第二,本文算法在定位計算模型中引入了快速迭代優化技術,減少了定位問題求解所需的迭代次數和計算時間;第三,本文算法還采用了并行計算架構,將各個功能模塊解耦,實現了測量、融合、計算等任務的并行處理,進一步縮短了定位時延。
(四)能耗性能評估
在實現高精度、實時定位的同時,降低能耗也是室內定位算法設計的重要目標[5]。本文通過測試定位終端設備的電流消耗和電池續航時間,來評估本文算法的能耗性能。在待機模式下,本文算法的平均電流消耗最低,僅為15毫安。指紋算法和TOA/AOA融合算法的待機電流消耗分別為25毫安和20毫安。在定位模式下,本文算法的平均電流消耗為60毫安,低于指紋算法的100毫安和TOA/AOA融合算法的80毫安。假設定位終端設備采用3500毫安時的電池,在定位模式下連續工作,見表4。可以看出,本文算法的電池續航時間最長,達到了58小時。指紋算法的續航時間為35小時,TOA/AOA融合算法的續航時間為43小時。
本文算法的能耗優勢得益于以下幾個方面:第一,本文算法在各個功能模塊中采用了低功耗設計,如自適應調節信號采樣率、動態管理傳感器工作模式等,減少了不必要的能量消耗;第二,本文算法通過優化的數據融合策略和定位計算模型,降低了計算復雜度,縮短了運行時間,從而降低了計算能耗;第三,本文算法利用5G網絡的高速率特性,壓縮傳輸定位結果,減少了通信能耗;第四,得益于較低的定位時延,本文算法能夠在較短時間內完成定位任務并進入低功耗狀態,進一步延長了電池續航時間。綜上,通過全面的仿真實驗評估,本文算法在精度、實時性和能耗等方面展現出了顯著的優越性,為高精度、實時、低功耗的5G室內定位提供了一種有效的解決方案,具有廣闊的應用前景。
四、總結與展望
本文針對5G網絡下的室內定位,提出了一種高精度定位算法優化方法,充分利用了5G網絡的技術優勢,從5G信號測量與數據預處理、多源異構數據融合、定位計算模型優化等方面入手,顯著提升了定位精度和實時性,同時通過低功耗策略延長了電池壽命。實驗結果表明,該方法能夠實現亞米級定位,定位精度和能效均優于現有方法。未來,研究人員將進一步優化算法,納入更多的傳感器和先驗信息,并在實際5G系統中開展測試,同時探索本文算法在智慧城市、車聯網等場景中的應用,助力5G室內定位技術的產業化發展,為智能生活提供有力支撐。
參考文獻
[1]李帥辰,武建鋒.基于Chan-Taylor和優化BP神經網絡的5G室內定位算法[J].中國慣性技術學報,2023,31(08):806-813+822.
[2]沈洪波,姚賽彬,汪保友.基于5G MR指紋的室內定位技術研究[J].郵電設計技術,2023,(02):37-41.
[3]劉源,徐威,武建鋒,等.基于LM優化BP神經網絡的5G室內定位[J].無線電工程,2022,52(08):1447-1455.
[4]謝海情,汪章紫璇,陸俊霖,等.基于5G子基站的室內定位卷積神經網絡模型[J].首都師范大學學報(自然科學版),2022,43(01):34-40.
[5]張路,王楠.基于5G通信系統的室內定位及導航解決方案[J].電信快報,2021(12):9-13.
作者單位:中國聯通廣東省分公司
■ 責任編輯:張津平、尚丹
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34