基于移動監測系統的隧道位移計算方法
2024-12-31 00:00:00陀楚明
西部交通科技 2024年10期
關鍵詞:測量
文章提出了一種盾構隧道位移計算的方法,將移動隧道變形檢測系統獲得的點云數據經過擬合、投影和插值生成正射影像,結合隧道灰度梯度累積特征識別隧道縱向裂縫,采用Canny算法和霍夫線檢測算法識別橫向裂縫,并提出了周向位移和徑向位移計算方法。研究得知:所提出的位移計算方法實現了裂縫的自動識別,對隧道變形位置和變形量的描述更加定量和具體,證實了基于移動監測系統的盾構隧道位移監測在隧道監測中的重要性。
移動監測;點云;隧道位移
U456.3A301024
作者簡介:
陀楚明(1989—),工程師,研究方向:隧道巖土。
0" 引言
隨著城市地鐵和高速鐵路的快速發展,定期進行隧道監測對于確保隧道安全至關重要[1]。檢測技術的發展正在不斷改變著常規測量的工作方式,如三維(3D)激光掃描技術和車載移動測量系統在高精度、高效、非接觸式測量等領域發揮著越來越重要的作用[2-4]。傳統的固定型激光掃描站掃描時間長、數據冗余較大[5]。而移動式測量設備由于具有效率高、質量好、受周圍環境影響小等特點,將移動測量引入隧道監測是可行的[6-7]。目前,隧道變形監測的主要需求是獲取豎向和水平位移、截面變形和收斂變形、裂縫和隧道滲漏等數據,以確定隧道是否有健康問題[8]。本文通過隧道斷面擬合和基于隧道正射影像來檢測提取斷面中心,基于點云切片和圓擬合來計算盾構隧道收斂直徑,實現對周向縫和徑向縫的自動識別,并計算出周向位移和徑向位移。
1" 移動監測系統
主流的隧道監測方法是全站儀,其測量精度最大為1 mm,每個3D坐標測量點的平均誤差最大可達0.8 mm。然而,由于測量人員投入巨大,隧道內環境復雜,需要在相鄰臺站之間進行圖像拼接,數據冗余大儀器操作困難且效率低下,難以實現全斷面檢測。為了克服這些缺點,可以使用移動測量設備,此類設備可以快速獲得軌道和周圍環境的高質量3D點云、隧道段的里程、準確的軌道剖面等信息。本研究中使用的移動激光測量系統的測量速度最高可達5.4 km/h,比傳統測量方法高5~10倍。
2" 移動隧道監控系統(MTMS)的組成
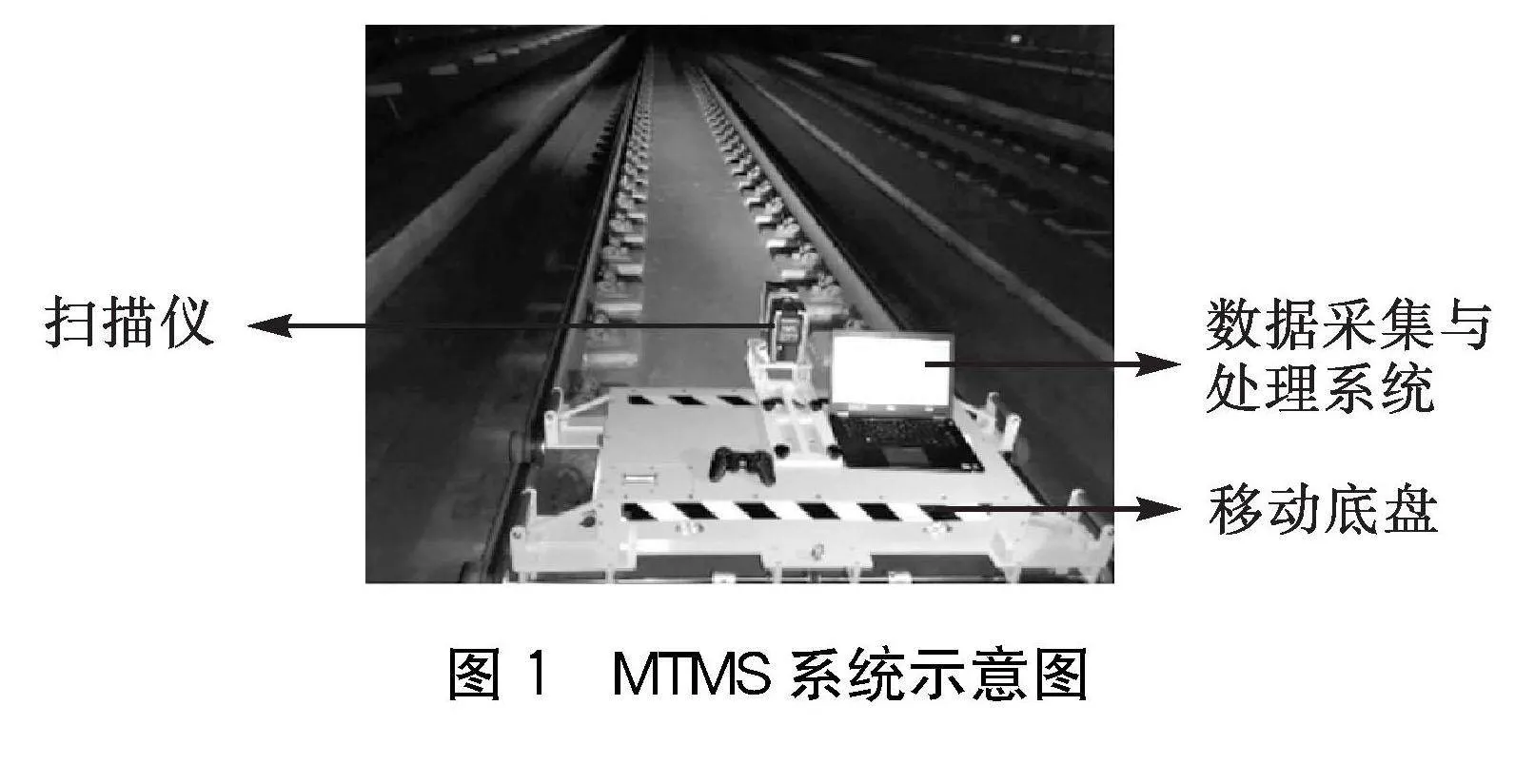
本文提出的MTMS系統主要包括掃描儀、移動底盤、數據采集與處理系統等。MTMS系統主要依靠掃描儀和移動底盤的相互配合進行掃描,并針對掃描數據開發了一種數據采集和處理軟件。該軟件集成了掃描儀的網絡原生界面,通過控制掃描儀的啟動和停止,并通過MTMS系統進行協調,可以在隧道內快速采集激光掃描數據。在軟件中嵌入了魯棒估計的最小二乘法、魯棒噪聲消除算法、實時信號處理算法和曲面幾何計算等高效算法。此外,采用中央處理器(CPU)多線程并行計算進行數據求解和點云渲染,以保證軟件的整體效率和高精度,并實現隧道點云數據采集和后處理的集成,該系統如圖1所示。
3" MTMS軟件算法
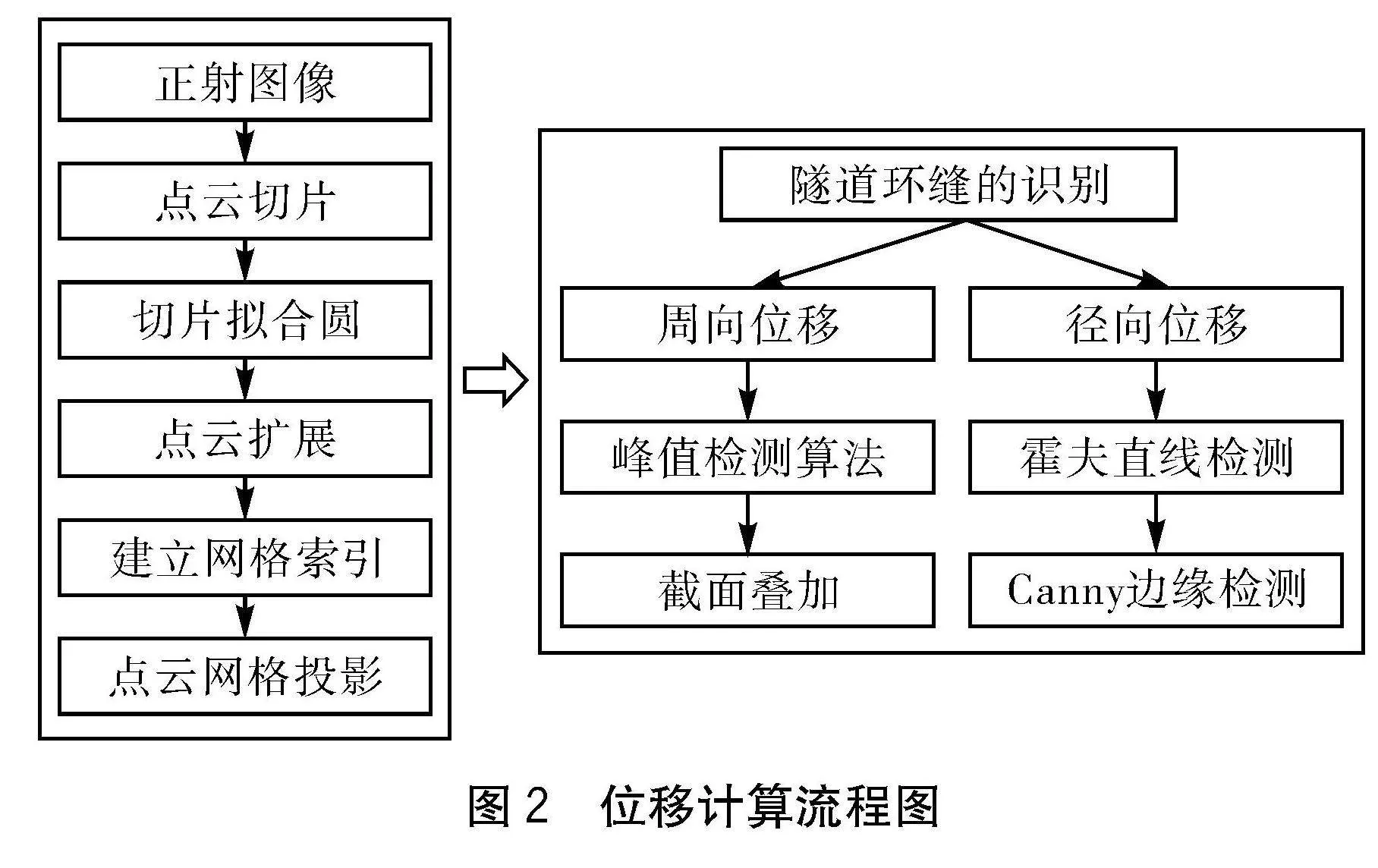
除了硬件集成外,監控系統的軟件算法是測量的核心。本文將正射圖像通過峰值檢測算法、Canny邊緣檢測和霍夫線檢測算法來識別裂縫,然后采用截面疊加法計算環形位移,并采用局部對稱垂直腳法計算徑向位移。計算流程圖如圖2所示。
3.1" 正射影像生成
3.1.1" 點云擬合圓
采集點云后,根據里程對點云進行切片,測量設備的正向為Y方向。此后,每個切片都可以近似為一個圓,并被視為由X和Z坐標組成的平面。通過最小二乘法擬合每個切片的點云,擬合結果得到圓的中心坐標和半徑,然后根據擬合結果對點云進行投影。圓的一般方程如下:
x2i+y2i+Ax+By+C=0(1)
對于最小二乘法的圓擬合,誤差平方的最優目標函數為:
E=∑ni=0x2i+y2i+Axi+Byi+C2(2)
根據最小二乘法的原理,參數A、B和C應最小化。在擬合之后,可以獲得最佳擬合中心坐標(X0,Y0)和半徑R的值。
3.1.2" 根據隧道弧長進行點云投影
擬合圓后,每個隧道切片都應一組擬合圓參數。考慮到切片中某一點的云坐標為(X,Z),圓的中心坐標為(XR,ZR),擬合圓的半徑為R。角度θ由截面點和圓的中心坐標形成,使用反正切函數計算如下:
θ=arctanY-YRX-XR(3)
l=θR(4)
切片點云中的每個點逐個計算弧長l,每個切片對應里程m,從而將3D坐標投影設為平面坐標(m,l),如圖3所示。
基于移動監測系統的隧道位移計算方法/陀楚明
3.1.3" 從網格到圖像
建立一個圖像矩陣,矩陣中的數據類型為64位的單通道數據,行數和列數與網格索引一致。此步驟的目的是為圖像矩陣分配灰度值。投影中有三種情況:
(1)網格索引中只有一個點。如果網格索引中有一個點對應于矩陣的行和列號,并且該點的強度值為I,則點的灰度值g=255×I/n存儲在矩陣對應的行和列號中。
(2)網格中有兩個或多個點。如果網格集中有兩個以上點,令網格中心坐標為(X0,Y0)、點坐標為(Xi,Yi)。網格中心和點之間的歐幾里得距離計算如下:
d=X0-Xi2+Y0-Yi2(5)
如果任何一個點d<10-6,則與該點對應的灰度值g=255×I/n存儲在與圖像矩陣對應的行號和列號中。
(3)網格中沒有對應矩陣的點。如果網格中沒有與矩陣的行和列編號對應的點,使d<10-6,則使用逆距離加權平均插值(IDW)方法。使用IDW算法的原因是給網格(即圖像像素)賦值,以防止圖像中存在黑點。假設存在N個離散點(X1,Y1)、(X2,Y2)、…(Xn,Yn),則點云數據中的點被視為平面中的離散點。將網格中心視為預測插值點Z(X,Y)。使用歐幾里得距離公式作為距離函數公式:
hi=X-Xi2+Y-Yi2(6)
式中:(X,Y)——插值點坐標;
(Xi,Yi)——每個離散點的坐標。
當確定功率參數時,使用權重函數來計算每個離散點的權重。
wi=h-pi∑ni=1h-pi(7)
式中:p——功率參數;
n——離散點的數量。
在本研究中,p=3。插值點的計算函數如下:
Z(X,Y)=∑ni=1wi×Z(Xi,Yi)(8)
式中,Z(X,Y)是插值點的強度值,該點的灰度值g存儲在與矩陣對應的行和列號中。g的計算方法如下:
g=255×Z(X,Y)n(9)
因此,可以通過輸出圖像矩陣來獲得隧道中的灰色正射圖像。
3.2" 縱向裂縫識別
3.2.1" 縱向裂縫檢測
本文采用峰值檢測算法對縱向裂縫進行檢測,對正射影像的灰度值進行縱向搜索。隧道裂縫在圖像中較暗(灰度值較小),環之間的裂縫垂直于X軸。利用這一特點,可以實現縱向裂縫的自動識別。根據圖像矩陣逐行計算列i+1和i-1列之間的灰度值差。
ΔGi=Gi+1-Gi-1(10)
比較i+1和i-1列后,ΔGi<0的出現次數記為ti,記錄矩陣每列的t值,并將其作為數組處理。許多峰值將出現在該矩陣中,根據裂縫處灰度值較小且縱向裂縫垂直于X軸的原理,峰值對應的列即為縱向裂縫的位置。重復上述步驟,并在多次迭代后,識別出所有環形接頭;然而為了避免出現較大的誤差,使用均方根誤差(RMSE)來消除粗誤差。設x1,x2,…,xn是計算出的縱向裂縫的列索引,md是縱向裂縫之間的間隔列數的算術平均值:
md=x1+x2+…+xnn(11)
Z=∑ni=1(xi-md)2n(12)
式中,Z是x1,x2,…,xn的均方根,如果滿足|xi-md|>2Z,且如果i不是縱向裂縫的對應列號,則將其消除。在圓形裂縫被識別之后,圖像像素位置被反向索引到點云的截面數據,使得環形裂縫在點云中的位置可以被確定。縱向裂縫識別結果如圖4所示。通過裂縫檢測,可以將正射影像存儲在不同的環形中,便于后期橫向裂縫檢測和隧道位移計算。
3.2.2" 封頂塊橫縫檢查
3.2.2.1" 圖像二值化
每個盾構隧道環由6個段組成,包括1個封頂塊(KP),兩個鄰接塊(CP、BP)和3個標準塊(A1p、A2p、A3p)。根據隧道內封頂塊的相應角度對點云數據進行預處理,生成封頂塊的正射影像,使用Canny算子對圖像鄰域中的像素進行平滑處理,然后為鄰域中不同位置的像素分配不同的權重,并保留了圖像的大部分整體灰度分布特征。
3.2.2.2" 霍夫線檢測
如果圖像中的像素形成一條直線,那么參數空間中像素坐標值(x,y)對應的曲線必須在一個點相交,參數空間的表達式如下:
r=xicosθ+yisinθ(13)
可以通過離散θ,根據點的坐標(x,y)計算r,計算(r,θ)的出現次數并選擇重復次數最多的兩個(r,θ)值來繪制直線。在本文中,使用霍夫線檢測來識別封頂塊的兩個橫向裂縫。根據管片設計數據,可以推斷出其他四個管片的裂縫位置信息。
3.3" 隧道位移計算
3.3.1" 隧道徑向位移計算
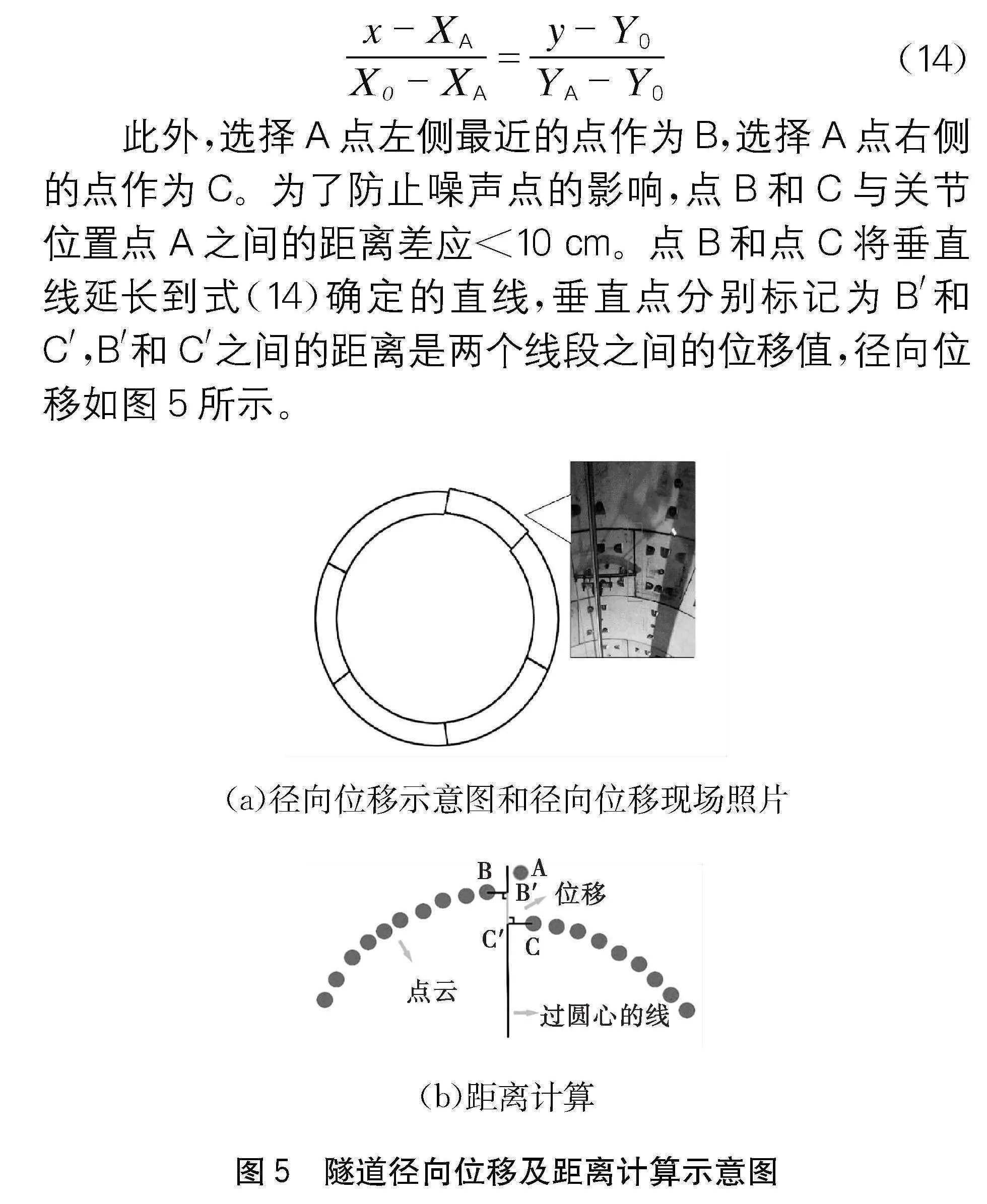
根據隧道橫向節理檢測結果,通過對點云的反演得到封頂塊周向節點的真實點云坐標。選擇橫向節點中間的截面(隧道管片中間的截面)來計算徑向位移。根據管片設計數據計算出其他管片的節點位置,使用最小二乘法選擇裂縫中間的5個相鄰截面進行圓擬合,中心坐標為(X0,Y0)。以封頂塊節點為例,將節點位置A點坐標設置為(XA,YA),從圓心到封頂塊接頭位置做一條直線,表達式如下:
x-XAX0-XA=y-Y0YA-Y0(14)
此外,選擇A點左側最近的點作為B,選擇A點右側的點作為C。為了防止噪聲點的影響,點B和C與關節位置點A之間的距離差應<10 cm。點B和點C將垂直線延長到式(14)確定的直線,垂直點分別標記為B′和C′,B′和C′之間的距離是兩個線段之間的位移值,徑向位移如圖5所示。
3.3.2" 周向位移計算
根據縱環檢測結果,得到環形裂縫的位置信息。在點云中,檢索縱環形裂縫左右兩側最近的10個相鄰截面,選取環形裂縫左側的第一段進行圓擬合,得到截面中心(X0,Y0)和半徑R。然后,在環形裂縫右側的相應對稱位置上找到一個截面。這兩個部分根據擬合圓的中心疊加。分別計算從左截面和右截面上每個點到擬合中心的距離,
計算公式為:
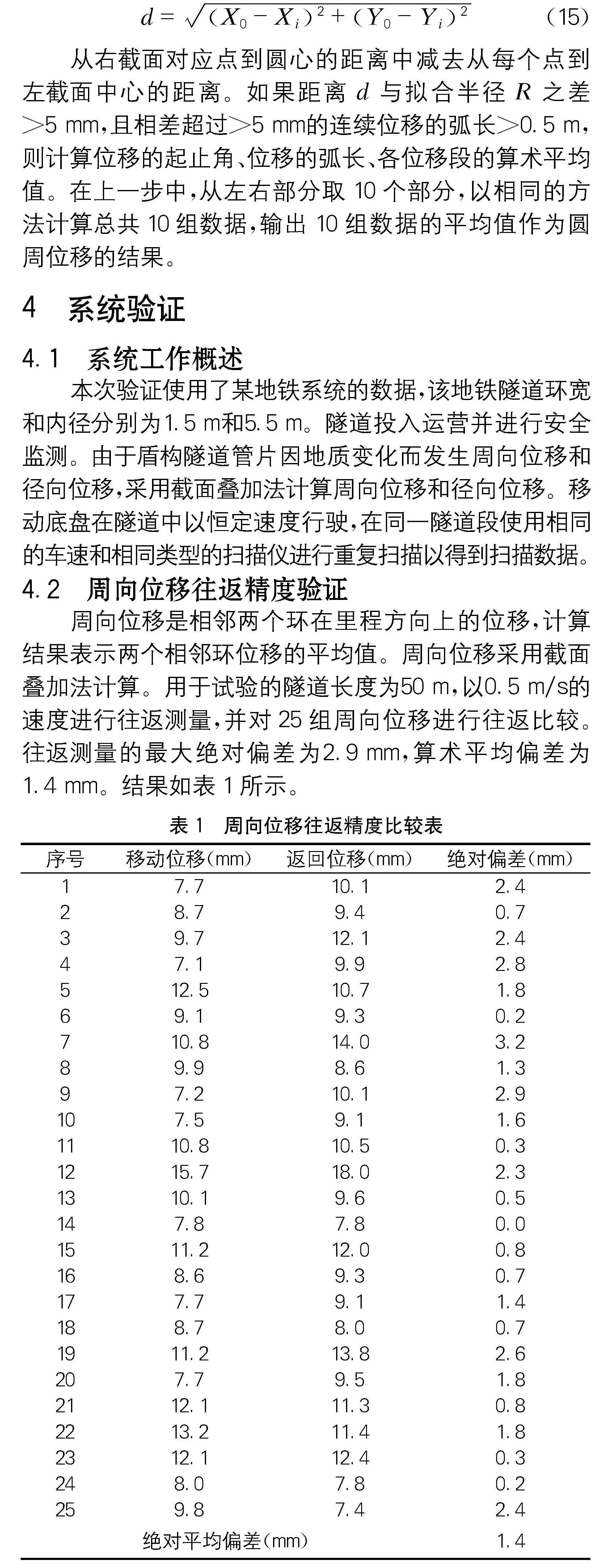
d=X0-Xi2+Y0-Yi2(15)
從右截面對應點到圓心的距離中減去從每個點到左截面中心的距離。如果距離d與擬合半徑R之差>5 mm,且相差超過>5 mm的連續位移的弧長>0.5 m,則計算位移的起止角、位移的弧長、各位移段的算術平均值。在上一步中,從左右部分取10個部分,以相同的方法計算總共10組數據,輸出10組數據的平均值作為圓周位移的結果。
4" 系統驗證
4.1" 系統工作概述
本次驗證使用了某地鐵系統的數據,該地鐵隧道環寬和內徑分別為1.5 m和5.5 m。隧道投入運營并進行安全監測。由于盾構隧道管片因地質變化而發生周向位移和徑向位移,采用截面疊加法計算周向位移和徑向位移。移動底盤在隧道中以恒定速度行駛,在同一隧道段使用相同的車速和相同類型的掃描儀進行重復掃描以得到掃描數據。
4.2" 周向位移往返精度驗證
周向位移是相鄰兩個環在里程方向上的位移,計算結果表示兩個相鄰環位移的平均值。周向位移采用截面疊加法計算。用于試驗的隧道長度為50 m,以0.5 m/s的速度進行往返測量,并對25組周向位移進行往返比較。往返測量的最大絕對偏差為2.9 mm,算術平均偏差為1.4 mm。結果如表1所示。
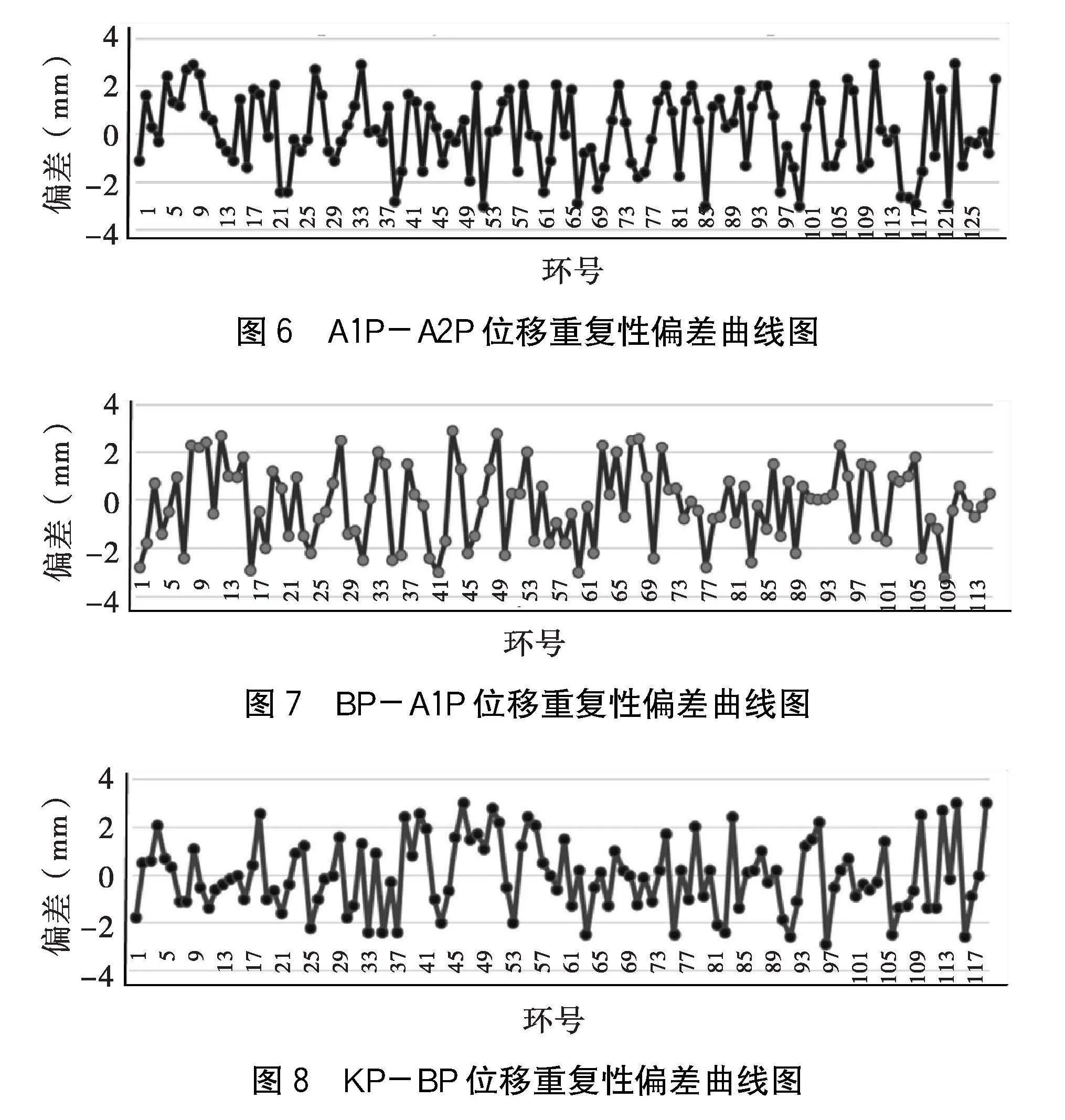
4.3" 徑向位移往返精度驗證
徑向位移是同一環中相鄰節段的內壁不在同一圓弧面上,相互交錯的現象。測試長度約為200 m;由于隧道存在電纜屏蔽層,僅使用KPBP、BP-A1P和A1P-A2P來驗證徑向位移的重復精度。A1P-A2P、BP-A1P和KP-BP位移分別如圖6-8所示。根據往返數據對比,KP-BP往返最大偏差為3.0 mm,平均偏差為1.2 mm,BP-A1P往返最大偏差為3.0 mm,平均偏差為1.4 mm,A1P-A2P往返最大偏差為3.0 mm,平均偏差為1.3 mm,往返測量精度<3.0 mm。
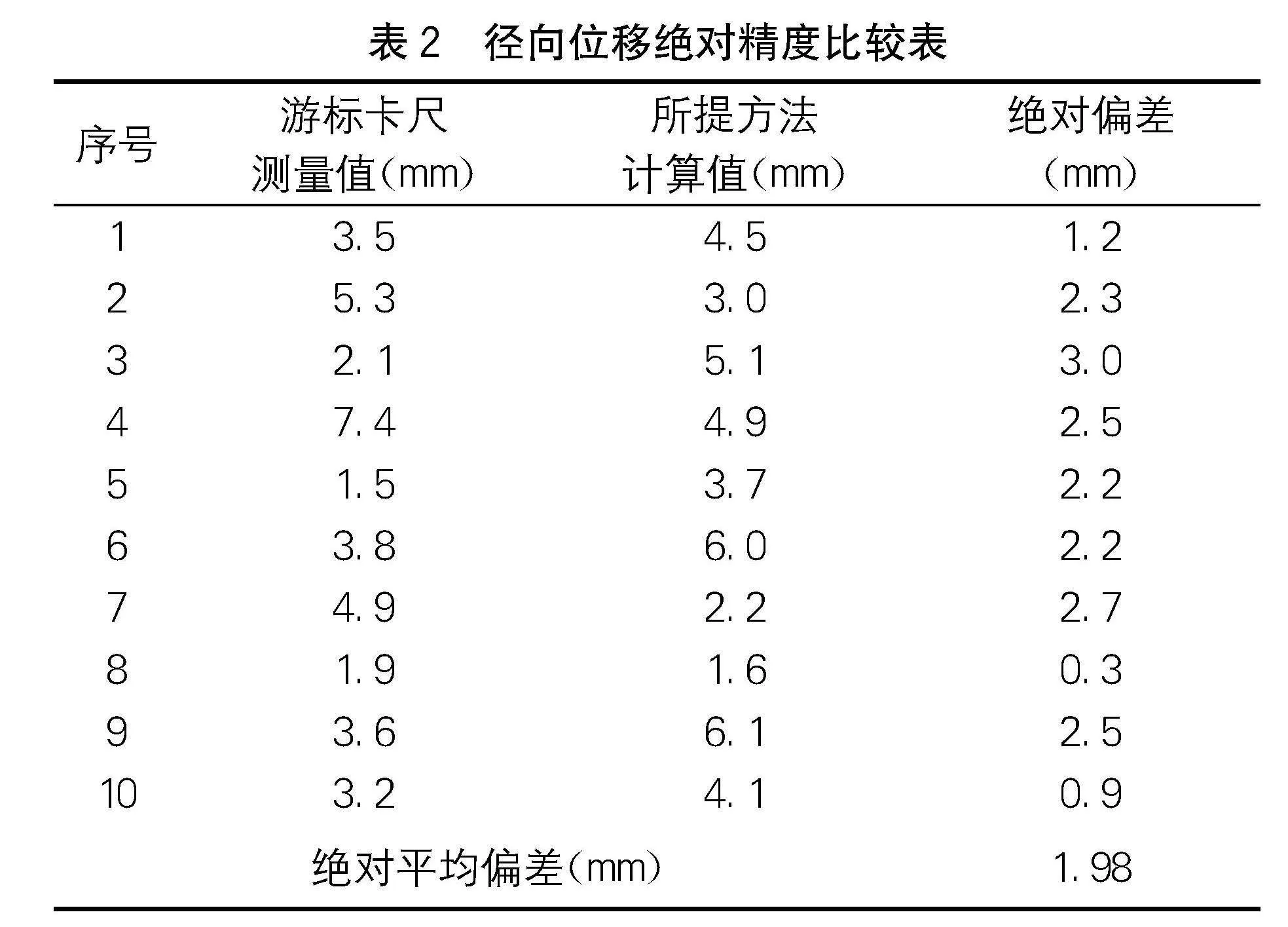
4.4" 徑向位移絕對精度驗證
由于BP-A1P環形裂縫靠近地面且易于測量,因此使用BP-A1P環形裂縫來驗證絕對精度。本研究采用游標卡尺測量10組BP-A1P徑向位移,并與計算的徑向位移進行比較。比較結果如表2所示,最大徑向位移差為3.0 mm,平均差值為1.98 mm。
4.5" 討論
本文主要研究盾構隧道的結構變形計算,未深入研究該硬件平臺的適用性。但是,本文提到的計算方法適用于各種用途的盾構隧道,僅受硬件設備(如公路隧道)的限制。未來,可以改進平臺,以便在地面上行駛,并探索算法的適用性。盡管所提出算法具有諸多優點,但也存在一些局限性,如需要獲取隧道段設計數據、圖像質量依賴性、隧道點云質量與隧道設計數據依賴性較大、部分封塊的輪廓不夠清晰、環縫識別效果不理想等。為了克服這些局限性,進一步提高識別效果,可利用深度學習神經網絡來解決相關問題。
5" 結語
隧道位移監測在當前隧道間隙收斂測量中起著重要作用。本文提出了一種基于移動激光掃描的位移計算方法,結合正射影像生成算法、峰值檢測算法、圖像Canny邊緣檢測和霍夫線檢測算法,實現了隧道數據的快速采集,并生成了高清隧道正射影像。試驗結果表明,周向位移和徑向位移的重復性精度<3 mm,隧道裂縫識別算法大大減輕了數據處理工作量。提出的計算方法適用于各種用途的盾構隧道,盡管該方法具有諸多優點,但也存在一些局限性,目前的算法很大程度上依賴于圖像質量、隧道點云質量和隧道設計數據。為了進一步提高識別效果,未來可以使用深度學習神經網絡來識別封頂塊和裂縫。
[1]牛亞彬.激光位移計在隧道基底補強監測與控制中的應用[J].中國鐵路,2021(3):49-52.
[2]李江沙,周" 榮.隧道縱向開挖變形位移監測數值仿真分析[J].水力發電,2024,50(2):18-23.
[3]王" 朋.探析激光監測技術在隧道施工中的運用[J].建材發展導向,2020,18(12):71-72.
[4]王兆衛,沈永芳.激光測量技術在沉管隧道水下沉放對接監測中的應用研究[J].新型工業化,2021,11(8):9-10.
[5]張" 濤,李春浩,林其燦,等.不同測量機器人在隧道變形監測中的應用研究[J].建筑安全,2023,38(8):73-75.
[6]蔣暉光.絕對位移測量在隧道監控量測中的應用[J].工程建設與設計,2020(6):94-97.
[7]顧煒澄.串聯TM50測量機器人在隧道變形監測中的應用[J].地理空間信息,2022,20(10):138-141.
[8]向澤君.基于亞毫米位移傳感器的斷面沉降測量裝置及監測系統[D].重慶:重慶市勘測院,2018.
20240312
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00