404 Not Found
404 Not Found
風電系統變流器控制策略研究
李春亞,陳光偉
(鄭州鐵路職業技術學院,河南 鄭州 451460)
0 引言
隨著風力發電技術的發展,直驅風電機組由于發電成本低、效率高等優點成為風電系統新的發展方向。作為風電系統并網的唯一通道,變流器控制技術對于風電系統至關重要。隨著電力電子技術的發展,變流系統已由不可控整流+Boost升壓電路+PWM逆變結構逐漸被雙PWM結構所替代[1]。機側變流器通過調節定子d、q軸電流,在額定風速以下實現最大風能的追蹤,控制發電機輸出電磁轉矩和有、無功功率的大小,提高風能利用率。網側通過對d、q軸電流調節,實現直流母線電壓的穩定和有、無功功率的解耦控制。本文對額定功率2 MW的永磁直驅風電機組變流器控制系統進行研究,通過仿真實驗驗證控制策略的可行性。
1 永磁直驅風電系統數學模型
永磁直驅風電系統主要由風力機、永磁同步發電機及雙PWM變流器幾部分組成。本文重點研究風速低于額定風速的階段,即實現最大風能的追蹤[2]。
1.1 風力機數學模型
風力機輸出功率P(W)與風速v(m/s)的關系表示為:
(1)

1.2 永磁同步發電機數學模型
機側變流器采用基于轉子磁場定向的矢量控制技術[3]。在同步旋轉dq坐標系下永磁同步發電機定子的電壓方程為:
(2)
其中:ud、uq和id、iq分別為定子端電壓和電流的d、q軸分量;Rs、Ls分別為定子繞組電阻、電感;ωr為發電機同步電角速度;Ψf為轉子永磁磁鏈。
永磁同步發電機輸出電磁轉矩為:
(3)
其中:p為電機極對數。
2 雙PWM變流器控制策略
2.1 機側變流器控制策略分析
通過式(3)可知,電磁轉矩Te與iq成正比,通過控制電流iq即可實現對電磁轉矩的控制,進一步控制電機轉速ωm,實現最大功率的跟蹤控制。由式(2)可知,定子電流id、iq是相互耦合的,為實現線性化控制,對兩個新的輸入量重新定義并進行拉氏變換可得:
(4)
2.2 網側變流器控制策略分析
風速變化時,網側變流器控制目標在保證并網電能質量達到并網標準的基礎上,實現直流側電壓的穩定控制。
本文研究選取電網側電壓矢量方向為d軸,可得到電網側變流器電壓方程為:
(5)
其中:Rg、Lg分別為電網側線路等效電阻、電感;ωg為電網同步電角速度;Vgd為電網電壓Vg的d軸分量;ugd、ugq和igd、igq分別為網側變流器控制電壓和電流的d、q軸分量。
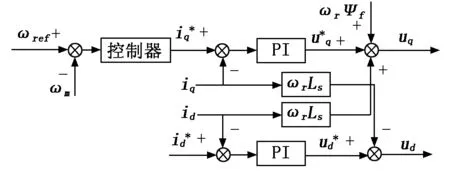
圖1 機側變流器控制原理圖
選取d軸電網電壓定向,Vgq=0,Vgd=|Vg|,輸送到電網的有、無功功率分別表示為:
(6)

3 仿真結果分析
通過對變流器控制策略的分析,基于MATLAB/Simulink仿真平臺,搭建永磁風電機組整機仿真模型。風電機組仿真參數為:額定風速v=12 m/s,機組額定功率為2 MW,風輪半徑R=38.7 m,電機極對數p=40,直流側電壓為1 500 V。仿真時間為2.5 s,風速變化曲線如圖3所示,風速在1 s~2 s內,由8 m/s漸變至額定風速12 m/s。直驅風電系統仿真曲線如圖4所示。
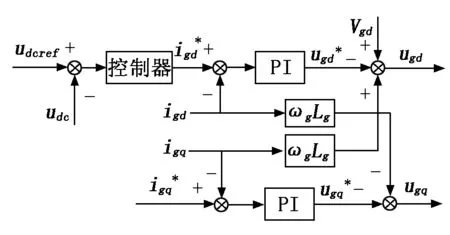
圖2 網側變流器控制原理圖
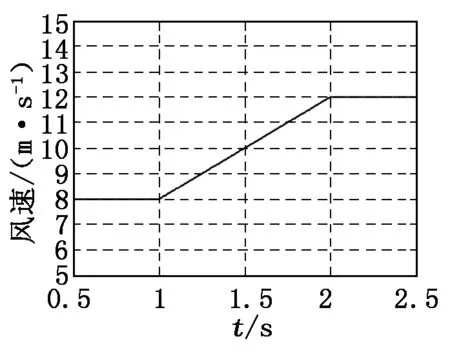
圖3 風速變化曲線
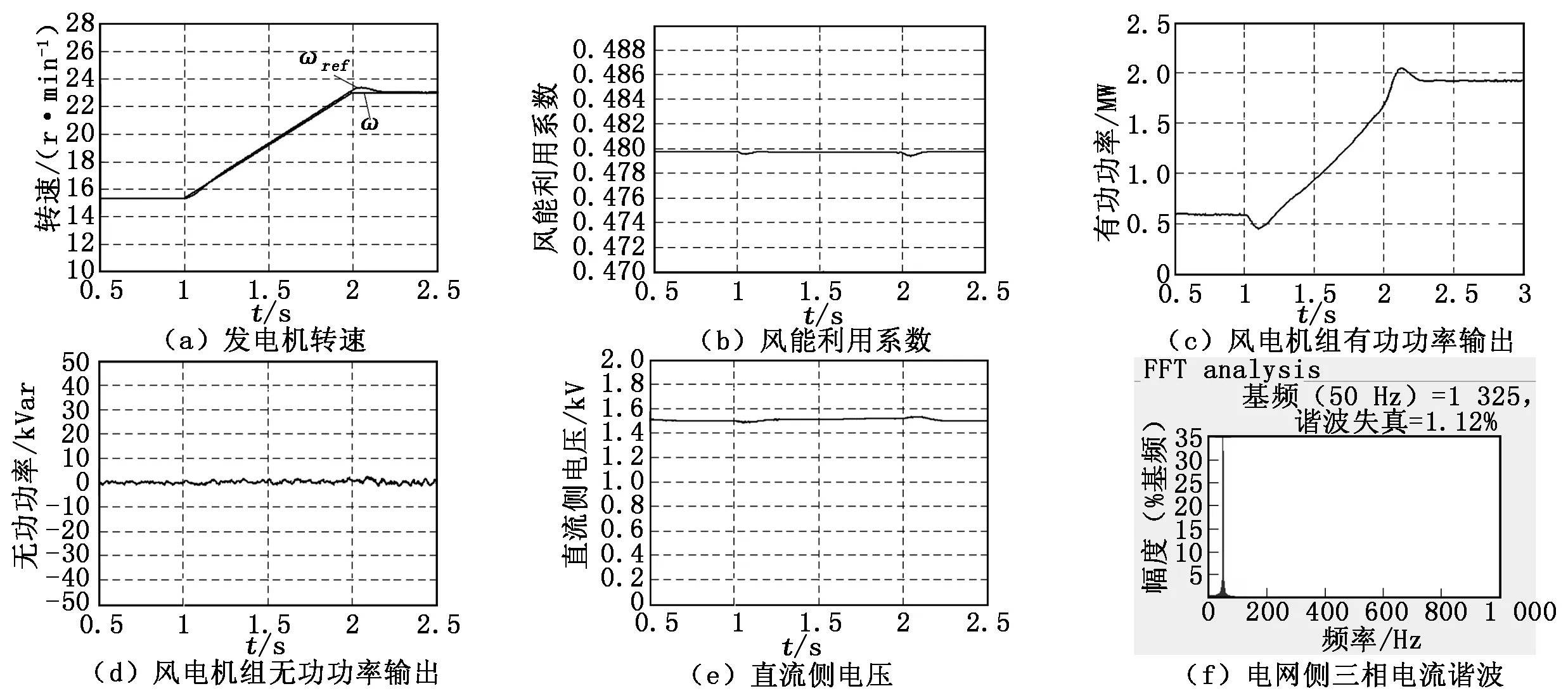
圖4 直驅風電系統仿真曲線
通過圖4(a)、同4(b)仿真曲線可知,在1 s~2 s風速漸變上升中,整個過程發電機的轉速能夠很好地跟蹤參考轉速,系統響應較快,擾動結束后,風能利用系數很快恢復到最佳狀態,穩定在0.48左右,實現最大功率點的跟蹤控制;由圖4(c)、圖4(d)曲線可知,有功輸出隨著風速的升高逐漸平穩上升,達到額定風速12 m/s時,輸出功率達到額定值2 MW左右,無功功率維持在0附近;由圖4(e)、圖4(f)可知,風速變化時,直流側電壓會有微小波動,達到額定風速時,很快恢復到穩定狀態,維持在1 500 V左右,并網電流諧波失真較低,THD=1.12%,達到了并網的要求(THD<5%)。仿真結果證明了控制策略的有效性。
4 結論
本文給出雙PWM變流器的控制策略,基于MATLAB/Simulink仿真平臺搭建了永磁直驅風電系統的整機仿真模型。仿真結果表明:風速變化時,該控制系統能夠保證風電機組的穩定運行,變流器控制實現了最大風能的捕獲和直流側電壓的穩定。本文建立仿真模型對控制策略進行驗證,對實踐具有重要的指導意義。
參考文獻:
[1] 王碩,金新民,趙新.1.5 MW永磁直驅風電并網變流器矢量控制的研究[J].電力電子技術,2011,45(11):41-43.
[2] 劉景利,張友鵬,高鋒陽. 永磁直驅風電變流器控制策略及仿真研究[J].電源技術,2012,36(4):554-557.
[3] 程鵬,李國祥.淺述永磁直驅風電機組變流器的控制策略[J].變頻器世界,2013(2):49-56.
[4] 劉軍,吳瓊. 永磁直驅風電系統網側變流器控制策略研究[J]. 控制工程,2015(1):20-24.