淺談使用UGNX對機械結構進行運動分析
2009-01-06 04:55:38張向明
數字技術與應用 2009年11期
關鍵詞:機械
張向明


[摘 要]隨著三維造型軟件的逐漸普及,越來越多的復雜計算在三維造型軟件中變得非常簡化和直觀,本文研究了利用美國EDS公司出品的UGNX系列軟件對常見機械結構進行運動分析的方法和實際意義,同時證實了UGNX是可以準確有效地分析機械運動結構的。
[關鍵詞]CAD UGNX 運動分析 機械
[中圖分類號]TP391.72[文獻標識碼]A[文章編號]1007-9416(2009)11-0112-04
Motion Analysis of Mechanism Structure by UGNX
Zhang Xiangming
(LG(Tianjin) Electronics CO., LTD.)
[Abstract]More and more complicated calculations and analysis are getting easier and obviously by advanced 3D modeling software fast spreading. This document will show the method and meaning of motion analysis by the US.EDS Crop UGNX software, and also we can make a conclusion that UGNX software could analyze the motion of mechanism effectively and accurately.
[Key Words]CAD UGNX Motion Analysis Mechanism
引言
本世紀90年代開始,AutoCad軟件在我國國內的應用已經非常的普遍,但是隨著現代化產品日益變得復雜、精密,原有的二維造型軟件已經不能再清晰、完整的表達出產品設計人員的設計意圖與理念,并且對于產品的一些動態分析無法實現,致使產品只能在制作出實物之后才能夠進行驗證,既浪費人力、財力又浪費時間,而先進的三維造型軟件在這些方面都擁有著傳統二維造型軟件無法比擬的優勢。本文僅以美國EDS公司出品的UG NX5.0版為例對常見機構的運動分析進行研究,并期望本文能夠對類似產品的結構分析起到拋磚引玉的作用。
1 使用UGNX5.0對機構進行運動分析
1.1 UGNX軟件綜述
UGNX5.0除了擁有強大的三維建模功能之外,還擁有強度分析,運動分析,機械加工,模具制作,流體分析,汽車設計/模擬等等多種強大的模塊,這里僅針對運動分析(motion simulation)部分進行分析說明。
1.2 UG NX5.0運動分析的詳細說明
使用UGNX5.0的建模模塊(modeling)創建結構各個部件的實體模型,具體方法請參照UGNX建模相關教程,這里不再進行贅述。
將保存好的機構三維造型(組件狀態)打開并選擇開始(Start)下拉菜單的運動分析(motion simulation),此時就進入了UGNX 5.0的運動分析界面。
選擇新建機件(Link),對所需要進行運動分析的各個機件全部進行定義,包括運動中心(如轉動部件的旋轉中心),運動方向等等,同時還可以根據需要對每一個機件的材料、重量等等特有屬性進行定義。
選擇新建運動副(Joint),對所有形成的運動副(包括移動副,轉動副,螺旋副等等)進行定義,對沒有相對運動的機件設定為固定副,當然也可以在定義機件時選擇將其定義為固定位置(Fixed),效果和這里定義固定副是一樣的。
(1)施加驅動力:根據實際的需要對機構的主動件施加相應的驅動力,一種是直接給定運動部件一個運動,比如一個滑塊以50mm/秒的速度勻速進行運動,則可以在定義驅動力的界面直接定義為勻速(constant)50,UGNX默認的單位是mm/秒。同時還可以給定主動件多種形式的運動,比如簡諧振動(需要定義振幅、頻率,初始位移、相位角等),還有其他可以用戶自己定義的多種運動方程式來給定驅動等等。另外一種則是通過給定作用力、扭矩等等來實現機構的運動,包括標量力(scalar)、矢量力(vector)等等。如果滑動副、轉動副或者其他的運動副的運動方式為非理想表面接觸(有摩擦),則同樣可以在該界面來定義由兩種相互接觸的材料特性決定的動、靜摩擦系數等參數來模擬實際的運動情況。
(2)定義解算:此時選擇solve,對以上已經定義了運動參數的機構進行自動解算,這里會讓用戶定義時間(Time)和步數(Step),注意這里的時間單位為秒,即主運動件運動的時間,如果在Time選項欄里面輸入10,Step里面也輸入10的話,就表示分析該運動機構運行10秒的整個過程,而整個過程分解為10個步驟,即每10/10=1秒進行一次數值分析計算,以此類推,當然運動的動畫過程是完全平滑而不是分步顯示,分步計算的是中間的各個點的特性數值。其他的一些選項則是關于重力加速度等等設置,一般選擇默認即可,然后再點擊solve進行解算,軟件運行分析。
(3)顯示、輸出運動分析結果:在界面左側模型樹的motion simulation上面選擇鼠標右鍵選擇運動分析(motion analysis),可以看到多個選項,包括動畫模擬,圖形分析,數據分析等等,可以通過直觀的動畫效果來觀察整個機構在規定的范圍之內運動的軌跡,圖形分析可以看到運動曲線,數據分析則是通過生成Excel表格形式列出所需要的不同構件關鍵點每一步(Step)的位移、速度,加速度等等精確的數值,非常直觀,一目了然。
舉例說明:這里以最典型的一個曲柄滑塊機構為例進行詳細的說明。
2 模型建立與參數定義
曲柄滑塊的各種參數定義參照本文2.1的內容進行設定,這里不再進行贅述,但是這里有幾個說明的地方:定義機件2的旋轉中心為A點(參照圖1)。
而機件4、5之間的運動副方向為水平方向,這里暫時給定曲柄2也就是由機件1和2組成的旋轉副定義驅動,這里輸入數值1,選擇勻速,意義為給定桿件2一個1度/秒的勻角速度圓周運動。
2.1 自由度驗證
根據機械原理的公式進行自由度的計算
F=3n-2PL-PH[1],
N:活動機件數;
PL:低副數量;
PH:高副數量;
在這里活動件有三個,即2、3、4號部件,低副PL=2,高副PH=0,所以F=3x3-2x4-0=1,也就是說給定一個驅動,該機構就可以有穩定的運動,由于之前我們已經對曲柄2進行了定義,所以直接運行解算(具體步驟參照2.1),就可以看到該曲柄滑塊機構以勻角速度(曲柄)平穩的運行(參照UG輸出的運動動畫)。機構運行的行程則由設定的時間來決定,如在Time選項里面輸入360(秒),而之前設定的曲柄運行速度為1度/秒,則曲柄正好運行一周,如果此時再給滑塊一個D向的勻速運動(這里也輸入1,表示意義為1mm/秒,這里要注意UGNX運動分析里面默認的單位是mm/秒),然后再執行運動分析解算,就會發現滑塊4與連桿3分離了,而實際中由于滑塊和連桿屬于剛性聯接,在這種情況下就會造成機構的破壞,所以給出的驅動數量不能多于機構本身要求的自由度,否則會對機構進行破壞。同樣的,如果驅動數少于機構自由度,會造成機構運動的不確定性或者不運動。在此例中顯然如果一個驅動力都沒有,該機構是不會運動的。
2.2 鎖死點驗證
此例中曲柄2的長度(兩圓心之間的距離)L2=50mm,連桿3的長度L3=65mm,滑塊與曲柄旋轉中心的Y向距離L4=9mm,(參照圖2、圖3)。
首先我們給定曲柄2一個勻角速度圓周運動,速度為1度/秒,運行解算后發現無異常,曲柄可以完成完整的圓周運動,表明當曲柄2為主動件,且桿長為之前設定值時無鎖死現象。如果此時我們給滑塊4一個向左的勻速運動,1mm/秒,則會發現機構會停在圖3所示位置上,
而且解算時也會出現鎖死提示(RecurDyn solver lockup),這樣機構就會在運行到鎖死點的時候停止運動,可以很直觀的觀察到,并且可以準確的記錄下來此時曲柄滑塊機構各個部件目前所在的位置,通過使用全程跟蹤(Trace Entire Mechanism)命令可以完全再現出鎖死點的準確位置(生成出現鎖死位置時各個部件的三維模型,便于和初始位置進行直觀的對比)。
2.3 極限位置的驗證
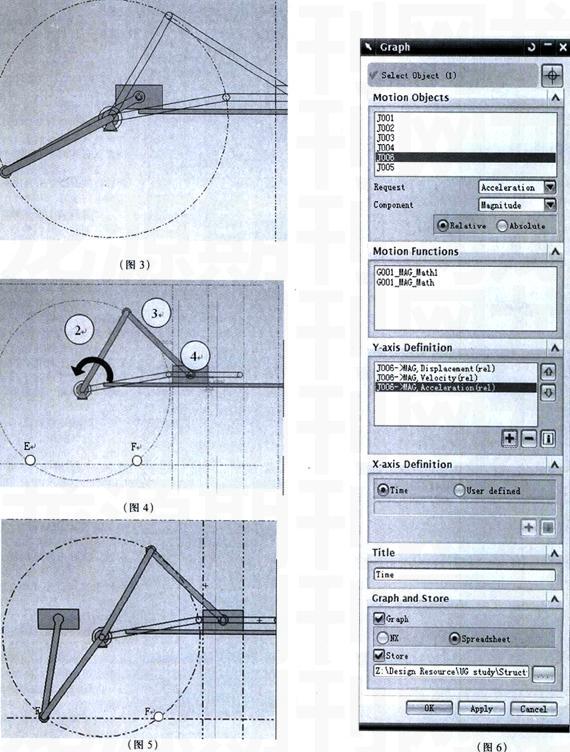
當以L2=50mm,L3=65mm,2號曲柄為主動件時,該機構的運動極限位置可以很直觀的看出,滑塊在兩個極限位置之間做往復的運動。如果這時仍將曲柄2作為主動件,而修改連桿3的長度,使L3=50mm,從圖4可以看出以連桿2的長度為界限的兩條線段已經和曲柄2的活動半徑相交于E、F兩點,則曲柄運動到下部的E點時,曲柄2已經無法再帶動連桿3以及滑塊4進行運動,從模擬的運動軌跡也可以明顯的看出運動的極限位置(圖5,E點)。同樣如果將曲柄2的運動方向反轉,又可以得到另外一個極限位置點F。(參照圖4、圖5)。
3 機構運動中主要點位的運動過程分析
依照之前定義的各項參數,此機構有確定的運動,接下來我們分析當曲柄2作為主動件并且以勻角速度運轉的情況下,滑塊4在水平面上面做直線運動的情況,包括位移、速度、加速度等方面的特性,這里先給定曲柄2一個勻速運動,1度/秒,此時對滑塊4進行位移、速度、加速度的分析。分析輸出的界面如圖6所示(參照圖6、圖7)。
這里的J006就是在UG中定義的移動副,分別對應輸出位移(displacement)、速度(velocity)、加速度(acceleration)。點擊ok并且選擇graph使用NX導出的時候得到如下的結果:位移(見圖7)、速度(見圖8)、加速度(見圖9)
從以上的結果可以看出,當給定曲柄勻速運動,滑塊運動的速度、加速度變化比較大對機構的沖擊也會比較大,同樣的以滑塊作為主動件也是類似的結果。所以可以通過改變主動件的驅動形式,如給定三角函數運動或者其他的運動函數可以減緩滑塊的速度、加速度變化從而減少機構的剛性沖擊,延長機構的使用壽命。
結語
UGNX的運動分析功能將很多之前繁瑣的分析計算變得非常簡化與直觀,減少了很多的計算量,尤其是當機構復雜,多個構件機構綜合到一起的時候,根本無法預計出運動的情況以及各點的運動特性。而本文則通過最簡單的曲柄滑塊機構為例介紹了從定義構件,建立運動副,給定驅動,運動分析一直到輸出分析結果的方法,借助UGNX軟件,相信許多復雜的結構分析都會變得簡單、直觀,并節省大量的人、財、物力,設計的機構也會更加的穩定與完整。
[參考文獻]
[1] 機械設計手冊編委會.機械設計手冊[M].機械工業出版社,2005年3月.
[2] 周開勤.機械零件手冊[M].高等教育出版社,2001年7月第5版.
[3] Unigraphics Solutions Inc.UG運動分析培訓教程[M].清華大學出版社,2002年9月.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
