
基于ITS車輛行駛安全駕駛輔助系統的研究
2009-03-19 01:59:12崔焱喆余成波
現代電子技術 2009年3期
崔焱喆 余成波
摘 要:在當今社會中,地面交通系統對人們的生活起到了至關重要的作用。但是,頻繁的車禍使得人們對汽車安全愈加重視。采用智能交通系統(ITS)的思想,針對汽車視野死角的問題,提出了一種駕駛輔助系統。該系統通過GPS,CCD相機來判斷車所處的位置、汽車間的車速、剎車扭矩等,并通過無線自組織網(Ad Hoc)進行車間通信,使車載MCU能夠判斷并做出主動預防碰撞措施。
關鍵詞:智能交通系統;駕駛輔助系統;GPS;無線自組織網;主動預防碰撞
中圖分類號:TP23文獻標識碼:A
文章編號:1004-373X(2009)03-171-04
Research of Driver Safety Assisting System Based on the Intelligent Transportation System
CUI Yanzhe,YU Chengbo
(Research Institute of Remote Test and Control,Chongqing Institute of Technology,Chongqing,400050,China)
Abstract:In nowadays,the ground transportation system plays an important role in people′s life.However,the frequent accidents make people pay more attention to automobile safety.In this paper,using the Intelligent Transportation System (ITS) theory,according to problems of the blind spot for the automotive vision,a driver assisting system is proposed.This system is characterized by vehicle position,current speed between the vehicles,and braking torques acquired using GPS and CCD cameras,and makes inter-vehicle communications through wireless Ad Hoc network.In this way,MCU on vehicle is able to make the judgment and take the initiative measures to prevent collisions.
Keywords:intelligent transportation system;driver assisting system;GPS;wireless Ad Hoc network;active collisions prevention
0 引 言
汽車安全主要關心的是駕駛員在駕駛過程中,遇到不斷變化的交通狀況時,如何保持汽車和人的安全性。目前,已經開發出來的是先進的巡航輔助高速公路系統(AHS),其通過安裝在公路兩旁的監測通訊設備,使車輛自動與車道上的標志、周圍車輛或智能交通設施相互配合。但是,在蜿蜒的山路、偏遠的地區等路況不佳的地方,不能處處安裝這些監測通訊設備,即使在部分路段安裝了這些設備,維護和保護其可靠性、安全性也是非常困難的,同時還會耗費大量的人力和財力。而且,通過分析AHS系統的工作原理[1],發現AHS系統不能獲得汽車運行的實時信息,如:汽車的位置、汽車的速度、剎車扭矩等;更不能進行將要發生事故的兩車間傳輸兩車位置、接近速度等重要信息的車間通信。因此,AHS系統僅能探測到交通事故的發生,而不能有效地采取主動方式來預防交通事故的發生。
本文所介紹的系統不需要安裝在道路兩旁的監測通信設備,就能夠在汽車行駛過程中,相互傳遞彼此靠近的汽車行駛信息,并且在適當情況下能夠做出主動預防措施,這樣就可以應付各種潛在的危險狀況,從而有效地阻止交通事故的發生。因此該系統可以看作是未來ITS技術的發展的一部分,具有重大的實用價值和理論意義。
1 駕駛輔助系統組成
圖1所示為基于ITS的駕駛輔助系統原理示意圖,它主要由GPS和CCD相機探測模塊、通信模塊和控制模塊等組成。其中,GPS和CCD相機探測模塊通過GPS接收機接收GPS衛星信號,求出該車的經緯度坐標、速度、時間等信息,利用安裝在汽車前部和后部的CCD相機,實時觀察道路兩旁的狀況;通信模塊可以發送檢測到的相關信息并在相互靠近的汽車之間實時地傳輸行駛信息;控制模塊可以在即將出現事故的時候做出主動控制,從而避免事故的發生。
1.1 GPS模塊和CCD相機探測模塊[2-5]
在汽車駕駛過程中,最容易出現碰撞事故的地方就是在拐角處,這是因為汽車設計過程中,其前視窗有視野死角,使得駕駛者在轉彎時沒有很好的視野,從而不能對即將發生的事故做出迅速明確的判斷。為了最大限度地消除視野死角問題,駕駛輔助系統利用GPS和CCD相機探測模塊得到車輛的行駛數據,包括車輛的位置、速度、兩車接近速度等。

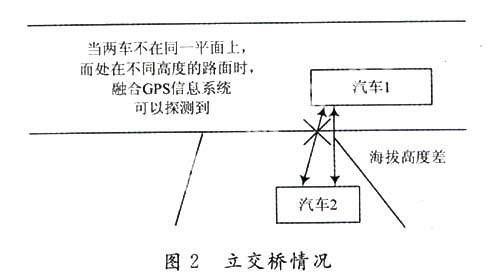
為了反映車間的距離位置信息,這里將地理信息系統(GIS)中的道路信息融入GPS定位數據系統,構成融合GPS信息系統。在GIS中,為了真實地反映地理實體,記錄的數據不僅包含實體的位置、形狀、大小和屬性,還記錄了實體間的相互關系,這樣結合能夠很好地滿足本系統的需要。因此,GPS衛星傳遞的位置信息不僅包括汽車所處的經度和緯度,還包括海拔高度以及車輛間的位置關系,這樣就能夠更為精確地表示出汽車所處的地理位置,避免兩車間信息傳遞出現“立交橋情況”(如圖2),不會使汽車做出錯誤判斷,而導致不必要的狀況發生。
安裝在汽車前部和后部的CCD相機即 “盲區探測器”,其作用是能夠實時觀察道路兩旁的狀況。其中,前部CCD可以在轉角處提前探測轉彎后的路況,判斷有無駛近的車輛;后部CCD可以看到后面車輛行駛情況,判斷有無車輛影響本車轉彎、超車等操作。
圖3所示為利用GPS和CCD相機判斷危險發生并根據危險做出判斷操作的過程示意框圖。首先,判斷是否有車輛駛近本車,并且將最危險的接近車輛作為通信對象;其次,通過Ad Hoc無線網絡通信,獲得本車與目標車的行駛信息,包括速度、位置、剎車扭矩等。根據這些信息,判斷目標車的行駛狀況是否正常。當監測到的信息顯示目標車運行不正常,則兩車間互相傳遞諸如剎車扭矩等的重要信息,并且根據具體情況,實時地通過CCD相機獲得兩車間的距離信息,在特定情況下,兩車MCU控制器均會采取主動或自動剎車,從而避免兩車相撞,同時司機也可以通過車內的監視屏來看到這些信息。即使在行駛過程中,出現不同的危險狀況,駕駛輔助系統都能夠根據從GPS和CCD相機得到的信息,針對不同的行駛狀況,做出正確精確的操作。

1.2 通信模塊[6-8]
移動Ad Hoc網絡由汽車上裝載的無線終端相互作用而形成,無需其他有線和無線網絡支持。其中,每輛汽車都是移動Ad Hoc網絡中的移動節點,而且可以自由地加入或離開網絡。移動Ad Hoc網絡中沒有網絡基礎設施(如蜂窩網中的基站),所有移動節點分布式運行,具有路由功能,利用一定的協議,使得移動節點自身可以發現和維護其他節點的路由。除適合本駕駛輔助系統的數據信息傳輸外,還具有一些蜂窩移動網絡不具備的優點:
(1) 可以隨時建立網絡,在沒有其他通信設施的情況下使用,大大節省運營成本;
(2) 不受固定拓撲結構的限制,具有很強的容錯性和魯棒性,在某些極端惡劣的情況下,即使部分探測汽車出現故障,網絡仍能正常運行。
駕駛輔助系統依靠車輛間的狀態信息相互傳遞,監測行車狀態,可以保護行車的安全性,包括調節行駛狀態,避免惡性碰撞。目前,現有的系統能夠警告駕駛者危險狀況的來臨,但不能自主做出預防措施,而本系統則彌補了這個缺陷。利用Ad Hoc網絡傳送的信息主要包括兩種:
(1) 定時傳輸由GPS和CCD相機以及車內部分傳感器得到的狀態信息,如:車輛的位置、行駛速度、剎車扭矩等。根據研究,這些狀態信息應以非常高的頻率傳遞,網絡中的每輛車每秒大約傳輸5~50次。
(2) 危險情況的警告信息。與上面定時發送的信息不同,這些警告信息有可能來自通信范圍內的通信車輛,節點離得較遠,因此需要多跳傳輸,所以這種信息只有當危險情況出現時才發出。
因此利用移動Ad Hoc網絡傳輸的系統能對車輛行駛狀況實施實時動態采集,具有建設成本低、周期短、維護費用低的特點,適合我國智能交通發展的現狀。但移動Ad Hoc網絡拓撲結構和物理層協議設計、采集信息的處理與其對未來路況預測等問題還有待解決。
1.3 控制模塊
通過Ad Hoc網絡傳遞過來的車輛信息進入車內整車控制器時,會對所得到的數據進行分析處理。如果分析的結果安全,不做出任何措施;當分析的結果出現警告時,則做出主動預防措施,其過程如圖4所示。
整車控制器是汽車控制的核心,它根據輸入信號,判斷汽車當前狀態,并經過一定的控制邏輯和控制算法的判斷分析,確定向各子系統發出當前控制信號的量值。如圖4所示,速度信號表征當前整車對輸出驅動扭矩的需求量,同理,制動踏板信號表示對整車制動扭矩的需求。本文所研究的汽車控制策略采用的是電力輔助控制策略。發動機MCU 根據總成控制器發出的發動機油門信號,結合當前的發動機轉速,確定出所需供油量和噴油定時,使電噴發動機通過有效組織燃燒向扭矩耦合器輸出扭矩。電機驅動系統根據輸入的表征電機扭矩大小的電機油門信號,以及電機工作模式信號決定電機的驅動扭矩輸出。
整車控制器根據駕駛員制動踏板及當前車速計算出所需機械制動扭矩值,以得到機械制動系統的制動指令,與原車相比,車輪制動力分別來自產生摩擦制動的制動系統和產生回饋制動的動力傳動系統,增加的回饋制動功能由混合動力及傳動系統實現,回饋制動力來自電機的制動力矩,并通過傳動系統施加于驅動輪上,而回饋制動的能量則通過傳動系統傳回電機。這樣提高了制動的可靠性,從而增加了駕駛輔助系統的可靠性和安全性。

2 車輛定位原理
若要使駕駛輔助系統安全可靠地運行,汽車間重要行駛信息的傳遞是關鍵,如何確定與本車進行通信的汽車更是基礎。判斷過程如圖5所示,分為4個步驟。
(1) 假設這是一個從四面八方行進的車行流模型(如圖5(a)所示);
(2) 與本車同方向行駛的目標車對本車沒有威脅,因此從候選對象中去除(如圖5(b)所示);
(3) 本車行駛目的地不同的車輛也從候選對象中去除(圖5(c)所示);
(4) 把余下的車輛當作通信候選對象。

在判斷車輛行駛方向的過程中,分析GPS傳遞過來的信號,通過車輛的位置改變來判斷汽車行駛方向;并且在汽車內部,安裝陀螺傳感器可直接檢測出汽車前進的方向。當兩個信息所顯示的行進方向相同時,就按以上去除規則進行通訊候選車輛的排除;當兩個信息所顯示的行進方向不同時,則保留作為通訊候選車輛。剩下的候選通信車輛,通過GPS接收機接收GPS衛星信號,求出該車的經緯度坐標、速度、時間等信息。由這些信息可以算出車輛之間的距離,車輛間靠近速度等參數,將距離最近和靠近速度最快的汽車作為通信對象。
為提高汽車定位精度,本系統采用了差分GPS技術。當汽車行駛到地下隧道、高層樓群、高速公路等遮掩物而捕獲不到GPS衛星信號時,系統可自動導入自律導航系統,此時由車速傳感器檢測出汽車的行進速度,通過微處理單元的數據處理,從速度和時間中直接算出前進的距離以及車間的距離和靠近速度。由GPS衛星導航和自律導航所測到的汽車位置坐標資料、前進的方向都與實際行駛的路線軌跡存在一定誤差,為修正兩者的誤差,所以融入GIS系統,采用地圖匹配技術,加一個地圖匹配電路,對汽車行駛的路線與電子地圖上道路之間的誤差進行實時相關匹配進行自動修正,此時地圖匹配電路是通過微處理單元的整理程序進行快速處理,得到汽車在電子地圖上的正確位置,以指示出正確行駛路線。
3 結 語
駕駛輔助系統,通過所獲得的GPS和CCD相機的信號,實時地對車輛行駛過程中的狀態信息進行監測,對潛在發生的碰撞事故實時進行預判,當判斷結果顯示將要發生碰撞事故時,通過Ad Hoc網,進行車輛間的無線通信,將本車行駛參數以及與之通信車的行駛參數互相傳遞,傳輸到車內的微控制器中,使得微控制器發出操作指令,提醒司機做出控制,當情況特別緊急時,可以直接對車輛進行恰當的控制。由于駕駛輔助系統不需要安裝在道路兩旁的固定監測設備,因此,該系統對于未來的ITS是非常有效的。
參考文獻
[1]Yamada H,Ohouchi H,Hirasawa T,et al.Applicability of AHS for Traffic Congestion in Sag.12th World Congress on ITS.San Francisco:CA.,2005.
[2]Mutoh N,Yokota K.A Torque Distribution Method Using CCD Cameras that is Suitable for Electric Vehicles Driven by Front and Rear Wheels Independently.PCC-Nagoya 2007.Nagoya,CD-ROM Proceedings:2007.
[3]Nakahara T,Yumoto N.ITS Development and Deployment in Japan.IEEE Conference on Intelligent Transportation System(ITSC 97).Boston:MA,1997:631-636.
[4]薛艷麗.國外的智能交通系統.交通與運輸,2007(4):15-16.
[5]楊東凱,寇艷紅,吳今培,等.智能交通系統中的地圖匹配定位方法[J].交通運輸系統工程與信息,2003,3(3):38-42.
[6]盛志杰,吳卉,喻泉,等.采用GPS探測車的城市交通流分析[J].微型電腦應用,2006,22(1):3-6,53.
[7]Tamura K,Furukawa Y.Autonomous Vehicle Control System of ICVS City Pal:Electrical Tow-bar Function.Presented at Proceedings of the IEEE Intelligent Vehicles Symposium.Dearborn:MI,2000.
[8]Tsugawa S,Kato S,Tokuda K,et al.A Cooperative Driving System with Automated Vehicles and Intervehicle Communications in Demo 2000.Presented at 2001 IEEE Intelligent Transportation Systems Conference Proceedings.Oakland:CA,2001.
作者簡介 崔焱喆 男,1984年出生,河南人,碩士生。主要研究方向為信號獲取與信息處理。
余成波 男,1965年出生,教授(工學博士),中北大學博士生導師、重慶工學院碩士生導師。主要研究方向為遠程測試與控制技術。
