船用鍋爐汽包水位模糊控制研究
2009-04-08 11:22:34董海運
中國艦船研究 2009年1期
董海運 肖 航
海軍工程大學船舶與動力學院,湖北武漢430033
船用鍋爐汽包水位模糊控制研究
董海運 肖 航
海軍工程大學船舶與動力學院,湖北武漢430033
傳統的鍋爐汽包水位單回路PID控制方案,無法克服汽包蒸汽流量擾動的影響。文章提出帶模糊監督的控制方案,擾動經模糊處理后作為前饋控制信號,通過引入監督控制環節自動調整前饋控制和反饋控制的權重,以實現控制目標。以船用鍋爐汽包水位控制為對象,采用上述控制方法實現鍋爐汽包水位的模糊雙沖量控制。經計算機和熱態仿真,表明系統超調量較小,有較好的有效性和實用性,證明所采用的控制方案是可行的。
鍋爐;汽包水位;模糊控制
1 引言
鍋爐水位自動控制即控制給水泵的啟停或給水閥的開度,從而控制給水量,使鍋爐的給水量與蒸發量相當,以適應鍋爐負荷的變化[1]。鍋爐水位高會導致蒸汽帶水進入過熱器并在過熱管內結垢,影響傳熱效率,結垢嚴重時將引起過熱器爆管;水位過低又將破壞部分水冷壁的水循環,引起水冷壁局部過熱而爆管[2]。目前,常用的汽包水位控制方案是在傳統的單回路PID控制的基礎上,引入前饋控制環節,構成汽包水位前饋—反饋控制系統,其前饋通道的傳遞函數僅簡單地采用純比例環節,無法克服汽包蒸汽流量擾動[3]。針對船用鍋爐水位這類具有可測外部擾動的對象,可以運用帶有模糊前饋控制的思想[4],將可測擾動引入控制系統,經模糊處理后作為前饋控制信號,通過引入監督控制環節,從而自動調整前饋控制作用和反饋控制作用的權重,以達到理想的控制效果。
2 船用鍋爐汽包水位控制模型
鍋爐給水調節對象如圖1所示。汽包的流入量Dw由給水調節機構控制,而流出量為汽輪機的耗汽量Dg,汽包的水位H不僅反映其流入量和流出量間的平衡關系,而且還受液面下氣泡體積的影響。因為在水循環系統中充滿帶有大量蒸汽氣泡的水,由于某種原因使蒸汽氣泡的體積發生變化,即使汽包的流入量和流出量均未變化,水位也會改變[5]。氣泡的體積受汽包壓力和爐膛熱負荷的影響。因此,水體作為調節對象,其擾動主要有兩個方面:
1)給水流量Dw,它是調節量,即基本擾動;
2)蒸汽量Dg,主要的外部擾動。
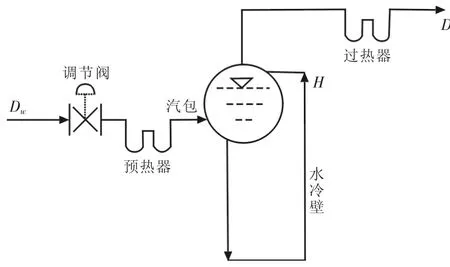
圖1 鍋爐給水調節對象
以下分析采用線性化模型。
假設給水流量Dw作階躍變化,如果僅考慮流入量和流出量的平衡關系,則它近似相當于一個積分環節,但由于預熱后給水的溫度大大低于汽包內的飽和水溫度,當“冷”水進入汽包后,吸收了原有的飽和水中的一部分熱量,使鍋爐的蒸汽產量下降,液面下的氣泡體積減小,使水位下降。綜合起來,在給水流量Dw擾動下汽包水位H的傳遞函數可表示為:

蒸汽流量Dg擾動主要來自汽輪機負荷的變化,它是調節系統的外擾。在蒸汽流量Dg的階躍擾動下,單從汽包流入量和流出量的平衡關系考慮,Dg的階躍增加將使水位H直線下降,但Dg的增加,使汽包壓力下降,液面下氣泡膨脹,其體積的增加導致水位升高。這種升高稱為 “虛假水位”[6-7]。綜合考慮,在蒸汽流量Dg擾動下汽包水位H的傳遞函數可表示為:

式中,τ為延遲時間,s;n為階數;ε為反應速度,mm/s;KD為放大系數;TD為時間常數,s。
汽包水位控制對象的簡化模型如圖2所示。
3 模糊控制方案設計
在鍋爐汽包水位控制中,模糊控制是主要控制策略之一,模糊控制是以模糊集合論、模糊語言變量及模糊邏輯理論為基礎的一類計算機數字控制方法[8-10]。

圖2 汽包水位控制對象簡化模型
仿效傳統控制方法中的雙沖量控制,構建模糊前饋—反饋控制系統,如圖3所示。由圖3可以看出該控制系統包括3個控制器:模糊反饋控制器C1、模糊前饋控制器C2和監督控制器C3;其中,模糊控制器C1和C2組成了前饋—反饋控制,而C3的引入目的是抑制“虛假水位”的影響。
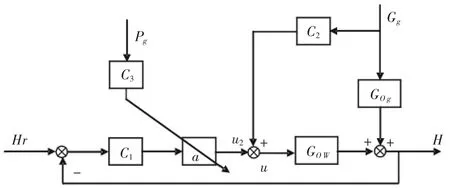
圖3 帶監督環節的汽包水位模糊前饋—反饋控制系統
將水位偏差、蒸汽流量偏差和汽包壓力偏差3路信號作為輸入,經模糊推理后,再經過解模糊得到控制數據,控制3個控制器的動作。規則庫存儲由專家知識和經驗歸納總結得到控制規則。
3.1 模糊反饋控制器C1的設計
模糊反饋控制器C1采用常規的模糊控制器,其結構如圖4所示。與前述相同,在圖4中,k1、k2和k3分別是偏差e、偏差的變化ce和控制作用u的歸一化系數。
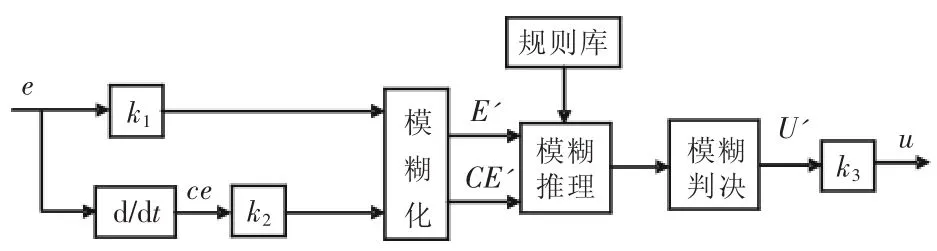
圖4 常規模糊控制系統
1)規則庫
采用如下模糊控制規則:

這里,i=1,…,7,取e,ce為控制器C1的輸入語言變量,語言值集合為:

其意義如下:
L:大;M:中;S:小;N:負;Z:零;P:正同樣可以定義輸出語言變量u的集合。
2)模糊推理
采用廣義肯定式推理(GMP)。
3)模糊化
采用單點模糊化。以偏差e為例,該方法將k時刻測得的ek模糊化成一個特殊的模糊集E,其隸屬度函數為:

由于對數據進行了歸一化,因此e的論域通常為[-1,1]閉區間,其他變量亦是如此。
4)模糊決策
采用中心平均法,將論域U′上各離散點ui(i=1,…,n)處的隸屬度作為權系數進行判決,如下式所示:
至此,完成將模糊形式的輸出轉化為精確量輸出。
綜合上述步驟,可以得模糊反饋控制器C1。
3.2 模糊前饋控制器C2的設計
在利用前饋控制來補償可測干擾影響的過程中,如果能夠精確建立控制對象前向通道與干擾通道的數學模型,并假設系統是線性的,則可以通過傳遞函數來設計動態前饋補償器。然而對具有較大工況變化的高熱負荷的鍋爐水位對象來說,要建立精確的數學模型非常難,所以采用可利用實際經驗的模糊控制理論和技術是解決這一問題的有效途徑。
根據工程實際中Dg對H的影響規律,總結出前饋控制規則,對于靜態前饋補償,前饋控制規則的形式可描述為:

式中,RiC2,i=1,…,m,表示用來描述控制規律的第i條模糊推理規則,m為規則的個數;Fi∈V,i=1,…,m,Gi∈V,i=1,…,m。
與前饋反饋控制器C1的設計類似,利用模糊前饋控制規則,通過清晰化處理,可以得到前饋補償uC2和增量型補償ΔuC2。
3.3 監督控制器C3的設計
在反饋控制和前饋控制共同作用下,可以抑制可測的負荷變化ΔDg擾動對鍋爐汽包水位H的影響。但是由蒸汽耗量到汽包水位通道中存在非最小相位環節,其動態過程表現為當蒸汽耗量產生變化時,引起汽包壓力的變化,即ΔDg>0時,汽包壓力的變化為Δp<0,必將導致“虛假水位”的產生,此時,反饋控制器會朝著錯誤的方向調節,導致汽包水位的振蕩。
為此設計一監督控制器C3,通過鍋爐汽壓p的監測并在汽壓變化時產生一監督控制作用uC3,用以抑制“虛假水位”的影響,因為盡管“虛假水位”是由于蒸汽耗量的變化引起,但其變化的劇烈程度卻直接與汽包壓力的變化有關。
監督控制的基本思想是當汽包壓力的變化為零或較小時,監督控制不起作用,這時反饋與前饋控制正常調節;當汽包壓力變化比較大時,由于有“虛假水位”的存在,反饋控制給出的控制作用uC1是錯誤的,此時應削弱uC1,主要利用前饋控制作用uC2來調節。
設pe(k)=p(k)-p(k-1)即汽包壓力的變化,它作為監督控制器C3的輸入變量,uC3為監督控制器的輸出。假定uC3的論域為[0,1]的閉區間,則若uC3=1時,相當于監督控制對模糊反饋控制無削弱作用,而當uC3=0時,相當于將模糊反饋控制切除。根據上述思想,可以建立如下的模糊監督控制規則:
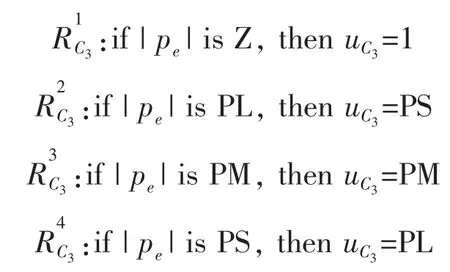
利用上述模糊監督控制規則經清晰化運算,便得到uC3,當鍋爐汽包壓力發生變化時,uC3的取值應為0<uC3<1,即通過判別壓力變化的劇烈程度來決定對反饋控制的修正,有效地抑制了由于“虛假水位”造成控制器誤動作而導致控制系統輸出的振蕩。
4 仿真試驗
4.1 計算機仿真
圖5是蒸汽負荷為單位階躍擾動時系統的輸出和控制作用,從圖中可以看出,仿真試驗的結果滿足船用主鍋爐水位的控制要求。
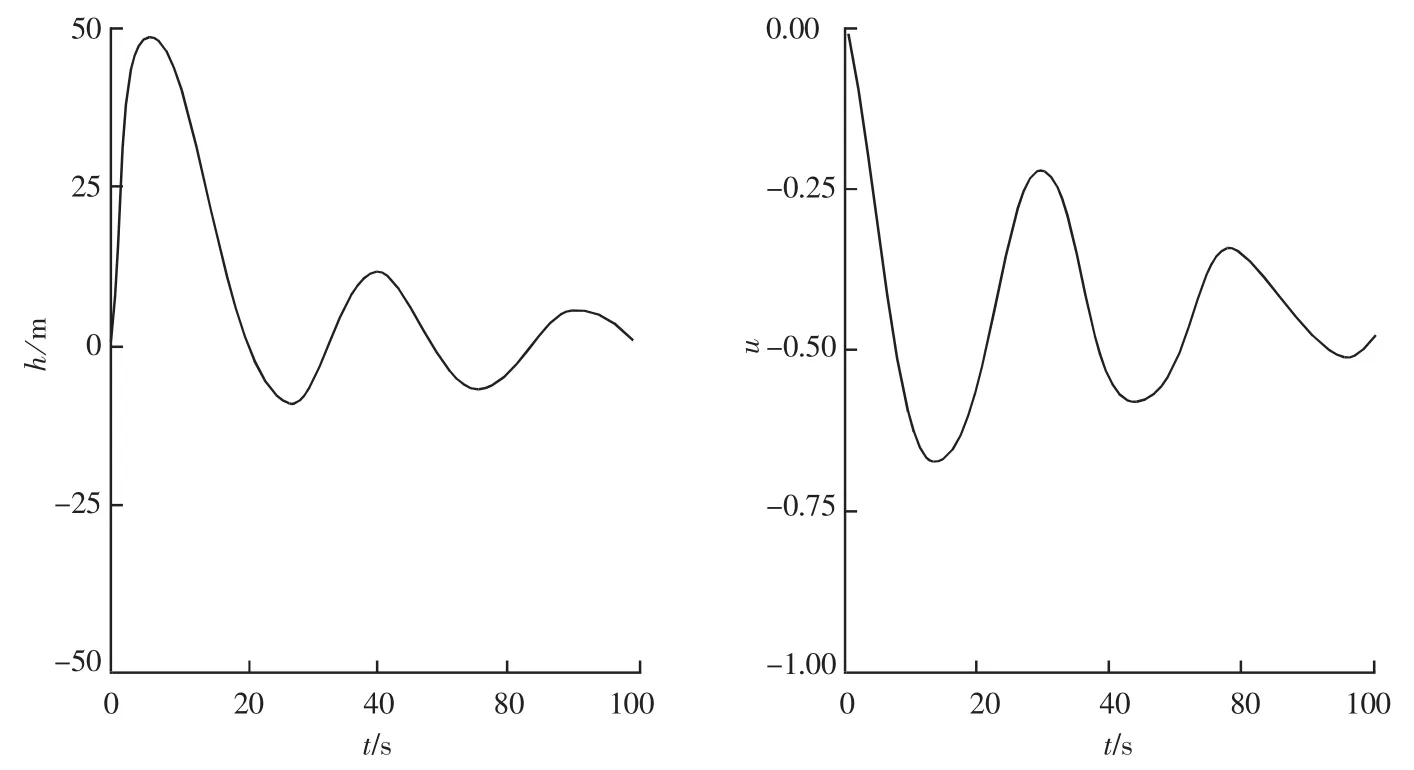
圖5 鍋爐水位模糊控制系統在負荷擾動下的響應
4.2 熱態仿真
將上述帶模糊監督控制的模糊控制律,經簡化后置入數字式可編程控制器并構成鍋爐汽包水位計算機仿真系統進行了驗證研究,該實驗機組的鍋爐過熱蒸汽壓力1.8 MPa,水位表的可見范圍是±100 mm,在主機負荷變化的情況下考察了模糊控制器作用的汽包水位的變化,數據見表1。
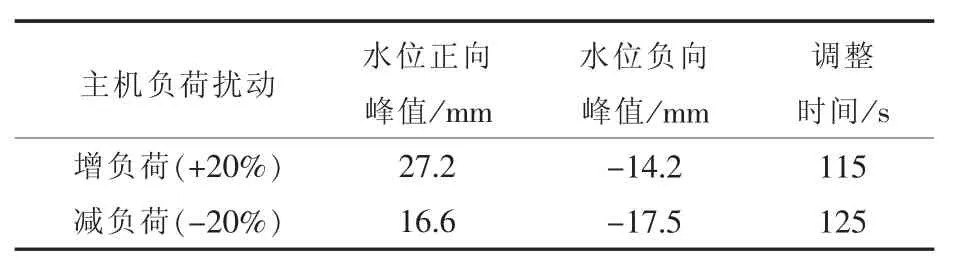
表1 實驗數據
研究結果表明,在給定工況下,采用本文的控制方案,系統超調量較小,在主機負荷擾動下,水位的波動在水位表的可見范圍內。
5 結語
針對某船用蒸汽鍋爐汽包水位控制對象,提出了模糊前饋-反饋的控制方案,其控制律由模糊前饋控制、模糊反饋控制和模糊監督控制3個部分組成,該方案實現了鍋爐水位的模糊雙沖量控制,將該方案應用于某實驗鍋爐的汽包水位控制,試驗結果表明:該控制方案是可行的,控制品質滿足船用蒸汽鍋爐汽包水位控制的技術要求。
[1]孫俊.船舶鍋爐汽包水位及其專家PID控制系統仿真[J].計算機仿真,2007,24(4):162-164,169.
[2]孫優賢,孫紅.鍋爐設備自動調節[M].北京:化工出版社,1982.
[3]高俊.鍋爐汽包水位模糊控制的應用研究[J].自動化儀表,2003,24(3):56-59.
[4]王東風,韓璞,王國玉.鍋爐汽包水位系統的預測函數控制[J].華北電力大學學報,2003,30(3):44-47.
[5]祝和運.過程控制工程[M].北京:化工出版社,2003.
[6]鄢波,丁維明,魏海坤.工業鍋爐汽包水位模糊自適應PID控制系統[J].發電設備,2006,20(4):276-279.
[7]楊為民,劉建芳.鍋爐汽包水位的Fuzzy控制應用[J].儀器儀表學報,2006(z1):545-546.
[8]周佳,曹小玲,劉永文.鍋爐汽包水位控制策略的現狀分析[J].鍋爐技術,2005,36(3):5-10,71.
[9]ZADEH L A.Fuzzy logic[J].Computer,1998,8(4):83-89.
[10]SEPùLVEDA R,CASTILLO O.Experimental study of intelligent controllers under uncertainty using type-1 and type-2 fuzzy logic[J].Information Sciences,2007,177(10):2023-2048.
Research on the Fuzzy Controller of Marine Boiler Drum Level
Dong Hai-yun Xiao Hang
College of Naval Architecture and Power,Naval University of Engineering,Wuhan 430033,China
For classical single loop PID control on marine boiler drum level,the disturbance of steam flux can’t be solved.A new fuzzy control with fuzzy supervisor method is put forward,in this method,the fuzzy feed-forward control is applied to transact the impact of measurable disturbance signal,and the fuzzy supervisor is used to adjust the proportion of feed-forward control and feed-back control automatically,the control purpose is carried out.Using this method,the double impulse fuzzy control of a marine boiler drum level is realized.According to the computer and experimentation simulation,the results show that this control strategy is effective and practical,and this method is feasible.
boiler;drum level;fuzzy control
TK223.75
:A
:1673-3185(2009)01-73-04
2008-11-13
董海運(1982-),男,碩士研究生。研究方向:船舶動力及熱力系統的監測、控制與故障診斷。
E-mail:dhy92330@sohu.com
肖 航(1963-),男,副教授,博士。研究方向:艦船動力系統監測控制與仿真