基于PC/104與單片機(jī)的仿人機(jī)器人控制系統(tǒng)設(shè)計(jì)
2009-05-12 03:14:34陶龍張國(guó)良孫大衛(wèi)
現(xiàn)代電子技術(shù) 2009年2期
陶 龍 張國(guó)良 孫大衛(wèi)
摘 要:為了簡(jiǎn)化仿人機(jī)器人控制系統(tǒng)結(jié)構(gòu),增強(qiáng)機(jī)器人系統(tǒng)的功能。采用PC/104嵌入式系統(tǒng)作為仿人機(jī)器的主控計(jì)算機(jī),完成圖像處理,做出控制決策,計(jì)算并生成運(yùn)動(dòng)序列。關(guān)節(jié)控制器選用C8051F310單片機(jī),采用串口與主控計(jì)算機(jī)通信,接收來(lái)自主控計(jì)算機(jī)的運(yùn)動(dòng)序列指令,產(chǎn)生PWM波,經(jīng)過(guò)放大電路,實(shí)現(xiàn)21路電機(jī)的控制。經(jīng)過(guò)實(shí)驗(yàn),得到圖像采集分析結(jié)果和仿人機(jī)器人穩(wěn)態(tài)步行。實(shí)驗(yàn)表明,這種控制系統(tǒng)能夠?qū)崿F(xiàn)仿人機(jī)器人的控制。
關(guān)鍵詞:仿人機(jī)器人;主控制計(jì)算機(jī);關(guān)節(jié)控制器;PWM波
中圖分類(lèi)號(hào):TP183文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):1004 373X(2009)02 145 03
Design of Humanoid Robot Control System Based on PC/104 and Single Chip Computer
TAO Long,ZHANG Guoliang,SUN Dawei
(Second Artillery Engineering University,Xi′an,710025,China)
Abstract:In order to simplify system structure and strengthen the function of humanoid robot system,embedded PC/104 system is applied as main computer of humanoid robot,which is used to accomplish image processing,make a control decision,calculate and generate movement sequence.The joint controller chooses C8051F310,receives the movement sequence instruction came from main computer,generats PWM wave,the control of 21 load electric circuit is realized by enlarge electric circuit.An analytical result of image collection,and humanoid robot steady on foot are gained by experiment.Results show that this kind of control system can carry out the control of humanoid robot.
Keywords:humanoid-robot;main-controller computer;joint controller;PWM wave
0 引 言
機(jī)器人作為一個(gè)各學(xué)科交叉的復(fù)雜系統(tǒng),越來(lái)越多的科研者采用機(jī)器人作為實(shí)驗(yàn)平臺(tái),因?yàn)樗C(jī)械結(jié)構(gòu)的設(shè)計(jì),控制系統(tǒng)的構(gòu)建,信息的采集與處理,運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)分析,人工智能等多方面知識(shí)的融合。仿人機(jī)器人從最初簡(jiǎn)單模擬人的外形、動(dòng)作、行走等,逐漸向人的思維、視覺(jué)、觸覺(jué)、智能等方面轉(zhuǎn)變,這就對(duì)機(jī)器人整個(gè)系統(tǒng)提出了更高的要求,不但要進(jìn)一步完善機(jī)器人的機(jī)械結(jié)構(gòu)和安裝,而且要增強(qiáng)控制系統(tǒng)的功能和處理能力。
對(duì)于控制系統(tǒng)而言,目前在仿人機(jī)器人上常用的控制芯片有DSP,ARM或其他一些單片機(jī)等,為了進(jìn)一步增強(qiáng)機(jī)器人的可擴(kuò)展性,這里采用嵌入式系統(tǒng)PC/104作為機(jī)器人的主控制計(jì)算機(jī),它具有實(shí)時(shí)性好,成本低,小型化的優(yōu)點(diǎn),克服了傳統(tǒng)的基于單片機(jī)控制系統(tǒng)功能不足和基于PC控制系統(tǒng)非實(shí)時(shí)性的缺點(diǎn),在仿人機(jī)器人應(yīng)用中具有廣泛前景。
1 仿人機(jī)器人結(jié)構(gòu)及控制系統(tǒng)
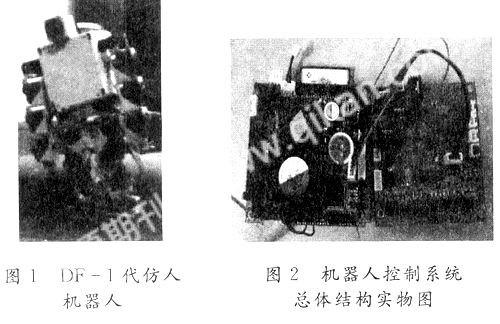
該機(jī)器人共有21個(gè)自由度,其中頭部2個(gè)自由度,可以實(shí)現(xiàn)頭部的俯仰和左右偏轉(zhuǎn),在頭上裝有一個(gè)CCD攝像機(jī),并且?guī)в幸曈X(jué)采集卡以及視覺(jué)處理計(jì)算機(jī),能夠?qū)崿F(xiàn)目標(biāo)的識(shí)別和定位,為主控計(jì)算機(jī)直接提供目標(biāo)信息。每個(gè)手臂3個(gè)自由度,能夠完成伸展和彎曲等動(dòng)作,在機(jī)器人摔倒后可以提供支撐力,讓機(jī)器人可以自行起立。腰上1個(gè)自由度,實(shí)現(xiàn)仿人機(jī)器人軀干的前傾和后仰,便于機(jī)器人在行走或執(zhí)行手上動(dòng)作時(shí)重心的調(diào)節(jié),增強(qiáng)機(jī)器人的可控性和穩(wěn)定性。下肢6個(gè)自由度,其中踝關(guān)節(jié)處2個(gè)自由度,髖關(guān)節(jié)處3個(gè)自由度,與人的腿部結(jié)構(gòu)相似,能夠靈活的完成下肢的各種動(dòng)作。仿人機(jī)器人的整個(gè)結(jié)構(gòu)采用框架式結(jié)構(gòu),有利于減輕機(jī)器人結(jié)構(gòu)上的重量,提高機(jī)器人的承載能力,為機(jī)器人控制系統(tǒng)的改進(jìn)提供了更大的空間。如圖1所示為仿人機(jī)器人實(shí)物圖。
仿人機(jī)器人控制系統(tǒng)以ACS-4051VEPC/104主板模塊作為主控制器,通過(guò)USB直接連接攝像頭,一個(gè)RS 232串行口與關(guān)節(jié)控制器相連,實(shí)現(xiàn)主控制計(jì)算機(jī)與關(guān)節(jié)控制器的通信。驅(qū)動(dòng)模塊和關(guān)節(jié)控制器集成在一個(gè)PC板上,主要實(shí)現(xiàn)PWM波的產(chǎn)生,驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。ACS-4051VE主板集成了Intel 82559ER10/100 Mb/s以太網(wǎng)卡,外接一個(gè)無(wú)線網(wǎng)卡可以實(shí)現(xiàn)與外部無(wú)線網(wǎng)絡(luò)的通信。仿人機(jī)器人控制系統(tǒng)總體上主要分為2個(gè)部分:主控制器模塊和關(guān)節(jié)控制器模塊。它的總體結(jié)構(gòu)實(shí)物圖如圖2所示。
2 關(guān)節(jié)控制器的設(shè)計(jì)
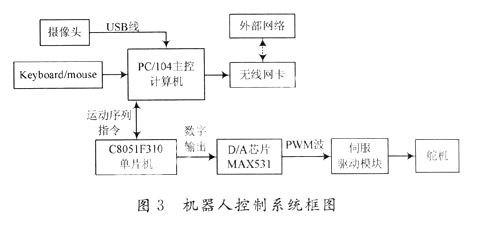
如圖3所示關(guān)節(jié)控制器主要集成了C8051F310器件,它是完全集成的混合信號(hào)片上系統(tǒng)型MCU芯片。主要特性有:
(1) 高速、流水線結(jié)構(gòu)的8051兼容的CIP-51內(nèi)核(可達(dá)25 MIPS),70%的指令的執(zhí)行時(shí)間為1個(gè)或2個(gè)系統(tǒng)時(shí)鐘周期,能滿足關(guān)節(jié)控制器的需要。
(2) 有4個(gè)通用16位計(jì)數(shù)器/定時(shí)器,以及16位可編程計(jì)數(shù)器/定時(shí)器陣列,5個(gè)捕捉/比較模塊,29個(gè)端口I/O。通過(guò)對(duì)片內(nèi)進(jìn)行編程,以及合理地分配比較器與I/O口,實(shí)現(xiàn)在C8051F310芯片上產(chǎn)生21路PWM波。由于單片機(jī)輸出的是數(shù)字形式的控制量,必須經(jīng)過(guò)D/A轉(zhuǎn)換變成模擬控制量,經(jīng)伺服放大器驅(qū)動(dòng)電機(jī)。
在此采用MAXIIM的12位串行D/A芯片MAX531作為數(shù)/模轉(zhuǎn)換芯片,將MAX531工作在雙極性電壓方式下,其輸出模擬量的范圍在-2.048~+2.048 V,精度為1 mV。輸出的模擬量經(jīng)過(guò)運(yùn)算放大器進(jìn)行放大,進(jìn)入伺服放大器驅(qū)動(dòng)電機(jī)。
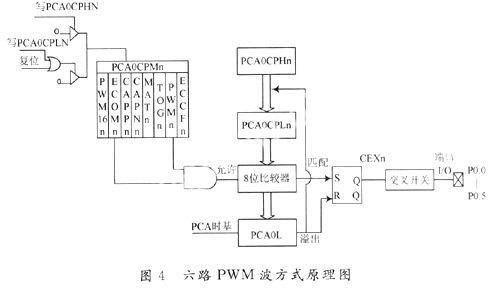
C8051F310作為關(guān)節(jié)控制器控制核心,它主要負(fù)責(zé)21路PWM的產(chǎn)生,在C8051F310芯片中集成了4個(gè)通用的16位計(jì)數(shù)器/定時(shí)器,5個(gè)捕捉/比較模塊,運(yùn)用1個(gè)計(jì)數(shù)器/定時(shí)器和1個(gè)比較模塊控制6路I/O端口,其他3個(gè)計(jì)數(shù)器/定時(shí)器和3個(gè)比較器控制15路I/O口,來(lái)實(shí)現(xiàn)21路PWM波的產(chǎn)生。這里以6路PWM波的產(chǎn)生來(lái)說(shuō)明運(yùn)用C8051F310實(shí)現(xiàn)電路,其電路圖如圖4所示:CEXn引腳產(chǎn)生脈寬調(diào)制PWM輸出,PWM輸出的頻率取決于PCA計(jì)數(shù)器/定時(shí)器的時(shí)基,使用模塊的捕捉/比較寄存器PCA0CPLn改變PWM輸出信號(hào)的占空比。當(dāng)關(guān)節(jié)控制器接收給定的6個(gè)電機(jī)轉(zhuǎn)動(dòng)角度序列數(shù)據(jù)后,由軟件將6個(gè)數(shù)據(jù)從小到大排列,并依次求出相鄰2個(gè)數(shù)的差值,按照最小的數(shù)、前2個(gè)數(shù)的差值到最后兩個(gè)數(shù)的差值排列好,并將從小到大的數(shù)據(jù)對(duì)映的交叉開(kāi)關(guān)的地址依次對(duì)映。
程序?qū)⒌谝粋€(gè)最小角度數(shù)放入比較寄存器的低8位PCA0CPLn中,當(dāng)PCA計(jì)數(shù)器/定時(shí)器的低字節(jié)(PCA0L)與PCA0CPLn中的值相等時(shí),CEXn引腳上的輸出被置“1”;同時(shí)程序?qū)⒌诙€(gè)數(shù)據(jù)即差值放入比較寄存器的PCA0CPLn中, PCA計(jì)數(shù)器/定時(shí)器清零,并將交叉開(kāi)關(guān)置位到相應(yīng)的輸出腳,當(dāng)PCA計(jì)數(shù)器/定時(shí)器的低字節(jié)(PCA0L)與PCA0CPLn中的值再次相等時(shí),CEXn引腳上的輸出被置“1”,直到這組數(shù)據(jù)完畢。PCA0L中的計(jì)數(shù)值溢出,CEXn輸出被復(fù)位,準(zhǔn)備第二輪的PWM波的產(chǎn)生。
3 實(shí) 驗(yàn)
3.1 圖像采集處理
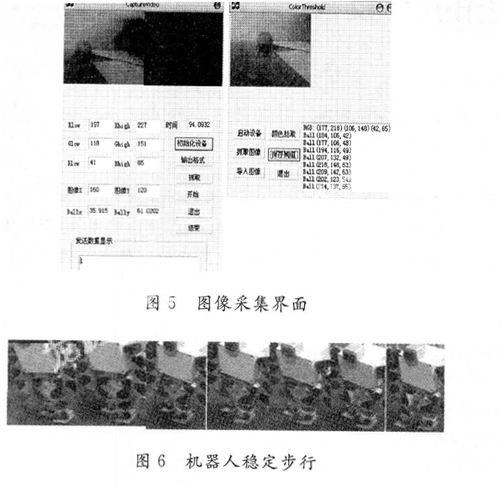
為了使機(jī)器人能夠達(dá)到預(yù)定目標(biāo),必須對(duì)軟件系統(tǒng)進(jìn)行設(shè)計(jì)規(guī)劃。主控計(jì)算機(jī)上安裝了WIN98系統(tǒng),圖像采集與處理采用VC進(jìn)行編程,下面是圖像采集處理的程序運(yùn)行界面如圖5所示。
3.2 仿人機(jī)器人穩(wěn)定步行
運(yùn)用這種控制系統(tǒng)來(lái)實(shí)現(xiàn)DF-1仿人機(jī)器人行走的控制,通過(guò)實(shí)驗(yàn)表明,此系統(tǒng)能夠完成仿人機(jī)器的動(dòng)態(tài)穩(wěn)定行走,圖6是一系列行走連續(xù)行走的截圖。
4 結(jié) 語(yǔ)
基于PC/104嵌入式計(jì)算機(jī)和 C8051F310 芯片設(shè)計(jì)了仿人機(jī)器人的控制系統(tǒng),實(shí)現(xiàn)了機(jī)器人的圖像采集和處理,以及機(jī)器人的穩(wěn)定步行。PC/104 嵌入式計(jì)算機(jī)功能齊備,運(yùn)算能力強(qiáng),可擴(kuò)展性好,作為仿人機(jī)器人控制系統(tǒng)有它獨(dú)特的優(yōu)點(diǎn)。單片機(jī)實(shí)現(xiàn)仿人機(jī)器人的關(guān)節(jié)控制,由于其計(jì)算能力有限,難以實(shí)現(xiàn)復(fù)雜的控制,因此這種控制系統(tǒng)可以用來(lái)作為實(shí)驗(yàn)用和教學(xué)用機(jī)器人。
參考文獻(xiàn)
[1]Giacomo Spampinato,Giovanni Muscato.A Bio-inspired Neumatic Platform for Human Locomotion Analysis and Stiffness Control[J].IEEE,2006:478-483.
[2]Okuda T.A New Metrology of Usability Test for New Communication Media-Humanoid Robot System[A].International Professional Communication Conference.2006 IEEE,2006:250-255.
[3]Fumio Kanehiro,Yoichi Ishiwata.Distributed Control System of Humanoid Robots based on Real-time Ethernet[A].Intelligent Robots and Systems,2006 IEEE/RSJ International Conference on.2006:2 471-2 477.
[4]Thomas Wosch,Wendelin Feiten.Reactive Motion Control for Human-Robot Tactile Interaction[J].IEEE,2002:3 807-3 812.
[5]付宜利,潘博,楊宗鵬,等.腹腔鏡機(jī)器人控制系統(tǒng)的設(shè)計(jì)及實(shí)現(xiàn)[J].機(jī)器人,2008,4(30):340-345.
[6]陳賀,楊鵬,楊毅.仿人機(jī)器人控制系統(tǒng)研究及其關(guān)節(jié)控制器設(shè)計(jì)[J].微計(jì)算機(jī)信息,2005,21(7):70-72.
[7]鐘華,吳鎮(zhèn)煒,卜春光.仿人機(jī)器人系統(tǒng)的研究與實(shí)現(xiàn)[J].儀器儀表學(xué)報(bào),2005,26(8):70-72.
[8]唐粲,王田苗,丑武勝,等.腦外科機(jī)器人控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)[J].機(jī)器人,2004,26(6):543-547,552.
作者簡(jiǎn)介 陶 龍 男,1984年出生,碩士研究生。研究方向?yàn)榉氯藱C(jī)器控制系統(tǒng)。
張國(guó)良 男,1971年出生,博士。研究方向?yàn)榉氯藱C(jī)器人控制系統(tǒng)。
賈 哲 男,1980年出生,碩士研究生。研究方向?yàn)榉氯藱C(jī)器人傳器系統(tǒng)。