精密水位傳感器測試系統(tǒng)研制
2010-01-12 09:30:44徐冬寅
徐冬寅
(江蘇畜牧獸醫(yī)職業(yè)技術(shù)學(xué)院,江蘇 泰州 225300)
精密水位傳感器測試系統(tǒng)研制
徐冬寅
(江蘇畜牧獸醫(yī)職業(yè)技術(shù)學(xué)院,江蘇 泰州 225300)
針對洗衣機(jī)用水位傳感器質(zhì)量檢測中存在的問題,開發(fā)了基于CAN(Controller Area Network)總線的精密水位傳感器檢測系統(tǒng)。在上位計(jì)算機(jī)與前端測控模塊之間的通信中,采用現(xiàn)場總線CAN網(wǎng)絡(luò)技術(shù)。由于實(shí)現(xiàn)了系統(tǒng)冗余,系統(tǒng)具有安全可靠、功能完善、操作簡便、性能價(jià)格比高等優(yōu)點(diǎn),成功實(shí)現(xiàn)了洗衣機(jī)用水位傳感器檢測的自動(dòng)化,取得了較好的經(jīng)濟(jì)效益。
傳感器;冗余;現(xiàn)場總線控制系統(tǒng)(FCS);局域控制網(wǎng)(CAN)
水位傳感器[1]在當(dāng)今的洗衣機(jī)制造領(lǐng)域中已經(jīng)得到了廣泛使用。根據(jù)水位傳感器生產(chǎn)和使用過程中質(zhì)量控制的要求,需要檢測其液位-頻率特性。當(dāng)前國內(nèi)的該行業(yè)大多數(shù)作業(yè)單位仍使用指針式或數(shù)字式儀表,測試過程需人工讀數(shù)、記錄、手工繪制其液位-頻率特性曲線,操作人員工作負(fù)荷繁重。傳統(tǒng)檢測方法效率低,精度差,可靠性不高,不能實(shí)現(xiàn)水位傳感器的整體性能分析,遠(yuǎn)不能滿足現(xiàn)代大規(guī)模生產(chǎn)的要求。
本文利用傳感器技術(shù)[2]以及CAN現(xiàn)場總線技術(shù)[3],結(jié)合工廠實(shí)際需要,研制了精密水位傳感器測試系統(tǒng),實(shí)現(xiàn)檢測數(shù)據(jù)的實(shí)時(shí)顯示、液位-頻率特性的查詢、曲線自動(dòng)生成以及報(bào)表管理等,整個(gè)系統(tǒng)操作簡單、穩(wěn)定性好、自動(dòng)化程度高,大大提高了工作效率和測試質(zhì)量,同時(shí)減少了操作工人數(shù)和勞動(dòng)強(qiáng)度,對提高洗衣機(jī)用水位傳感器制造技術(shù)和檢測技術(shù)的發(fā)展具有積極的作用。
1 系統(tǒng)檢測原理及組成
洗衣機(jī)用水位傳感器的工作原理是將水位高度的變化通過空氣壓力轉(zhuǎn)換成傳感器內(nèi)部膜片上壓力的變化,從而導(dǎo)致傳感器輸出電感L的變化, 將水位傳感器輸出電感與外部電路組成LC振蕩電路,就可將電感的變化轉(zhuǎn)換成振蕩頻率的變化, 不同的水位高度通過水位傳感器可以產(chǎn)生不同頻率的脈沖信號,通過檢測該脈沖信號頻率與水位高度的對應(yīng)關(guān)系, 就可實(shí)現(xiàn)水位傳感器的質(zhì)量檢測。
測試系統(tǒng)要求在不同的水位高度時(shí),準(zhǔn)確測量出由水位傳感器輸出的脈沖信號的頻率,并根據(jù)要求實(shí)時(shí)繪制液位-頻率曲線,實(shí)現(xiàn)相應(yīng)的查詢及報(bào)表打印功能。系統(tǒng)中選用了伺服電動(dòng)機(jī)作為主電機(jī)來實(shí)現(xiàn)精確定位,電機(jī)的輸出通過減速機(jī)構(gòu)與執(zhí)行機(jī)構(gòu)相連,最后帶動(dòng)細(xì)鋼管在水箱中上下移動(dòng)實(shí)現(xiàn)管內(nèi)水位高度的變化,通過編碼器對水位高度實(shí)時(shí)檢測,頻率的實(shí)時(shí)檢測由單片計(jì)算機(jī)計(jì)數(shù)器來完成。系統(tǒng)控制原理框圖如圖1所示。
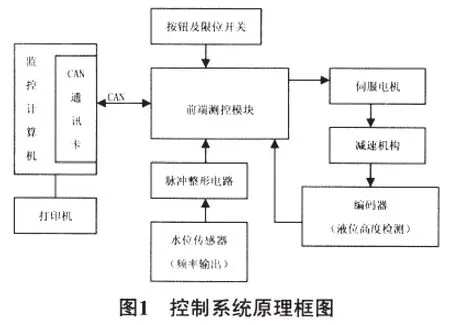
前端測控模塊既可作為系統(tǒng)的一個(gè)組成部分,與上位監(jiān)控計(jì)算機(jī)實(shí)時(shí)通信,完成參數(shù)的設(shè)置,手動(dòng)遠(yuǎn)程控制,將采集的數(shù)據(jù)上傳等工作。它也可以獨(dú)立工作,即在上位監(jiān)控計(jì)算機(jī)因故停止工作的情況下,前端測控模塊仍可以正常運(yùn)行,從而在不增加設(shè)備投入的情況下實(shí)現(xiàn)了系統(tǒng)的冗余,提高了系統(tǒng)的可靠性。同時(shí),由于系統(tǒng)降低了對上位計(jì)算機(jī)可靠性的要求,因此上位機(jī)可以采用普通的PC機(jī)來代替工業(yè)控制計(jì)算機(jī),降低了系統(tǒng)的成本。
系統(tǒng)中的上位計(jì)算機(jī)主要完成人機(jī)對話和系統(tǒng)管理功能。可實(shí)現(xiàn)水位上升、下降高度等分段測試參數(shù)的設(shè)定和修改;實(shí)際水位高度、水位傳感器輸出脈沖信號頻率的實(shí)時(shí)顯示;對下位測控模塊上傳的數(shù)據(jù)進(jìn)行數(shù)據(jù)庫管理,實(shí)現(xiàn)數(shù)據(jù)的查詢和打印等;并可對工作進(jìn)程進(jìn)行實(shí)時(shí)監(jiān)控。對執(zhí)行機(jī)構(gòu)進(jìn)行手動(dòng)遠(yuǎn)程控制。
2 前端測控模塊硬件設(shè)計(jì)
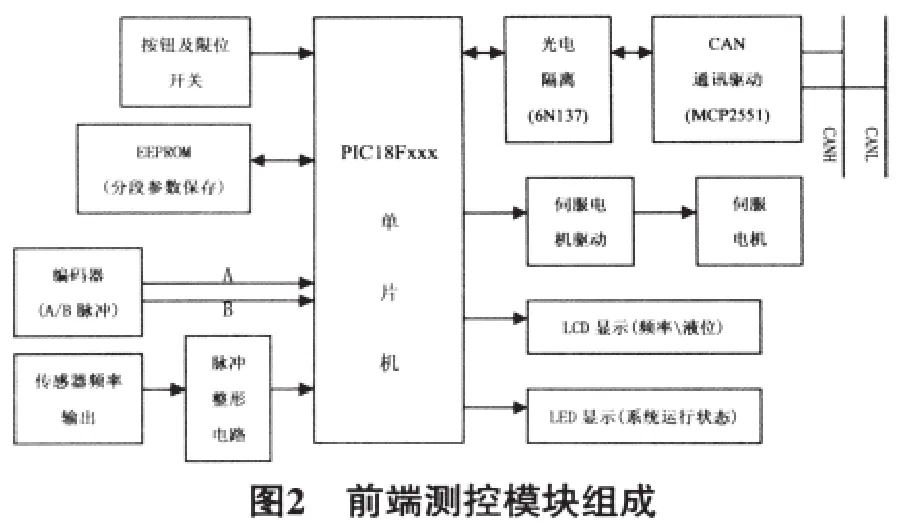
系統(tǒng)前端測控模塊采用PIC18F458[4]單片機(jī)控制,由電源電路、復(fù)位電路、LCD/LED顯示電路、CAN接口電路、脈沖整形電路、分段參數(shù)保存電路(EEPROM:Electrically Erasable Programmable Read-Only Memory,EEPROM)等組成,如圖2所示。
水位傳感器輸出脈沖信號頻率的測量。單片機(jī)的定時(shí)/計(jì)數(shù)器-1在規(guī)定的時(shí)間內(nèi)(如1s)對脈沖信號進(jìn)行計(jì)數(shù),則1s時(shí)間到后,定時(shí)/計(jì)數(shù)器-1所計(jì)脈沖數(shù)就是所要測量的脈沖信號頻率的大小。
水位高度的測量主要是通過編碼器來完成,編碼器的A相信號送至單片機(jī)的外部中斷-1,在外部中斷-1處理程序中對A相脈沖進(jìn)行計(jì)數(shù)(若此時(shí)B相脈沖為高電平,則計(jì)數(shù)增1;若此時(shí)B相脈沖為低電平,則計(jì)數(shù)減1)。當(dāng)電動(dòng)機(jī)轉(zhuǎn)動(dòng)時(shí),編碼器脈沖計(jì)數(shù)值就會不斷累加。通過傳動(dòng)機(jī)構(gòu)的合理設(shè)置, 每個(gè)脈沖對應(yīng)0.25mm 的水位高度變化, 那么所計(jì)數(shù)的編碼器脈沖數(shù)值經(jīng)過編程計(jì)算, 就可得出實(shí)際水位高度的變化。
伺服電機(jī)驅(qū)動(dòng)。我們利用PIC18F458內(nèi)部包含的PWM (Pulse Width Modulation)模塊產(chǎn)生1KHz脈沖信號,送至伺服電機(jī)驅(qū)動(dòng)電路,與其他控制信號相配合,驅(qū)動(dòng)伺服電機(jī)根據(jù)要求實(shí)現(xiàn)快速、慢速、精確定位等動(dòng)作。
系統(tǒng)通訊。利用PIC18F458內(nèi)部包含的CAN通訊模塊進(jìn)行,從而簡化了系統(tǒng)硬件和軟件設(shè)計(jì)。
用戶在上位監(jiān)控計(jì)算機(jī)進(jìn)行的各項(xiàng)參數(shù)設(shè)置(如分段液位參數(shù)等),通過CAN現(xiàn)場總線保存在EEPROM中,LCD顯示器采用128×64圖形點(diǎn)陣史液晶顯示器,可實(shí)時(shí)顯示當(dāng)前水位以及對應(yīng)的水位傳感器輸出脈沖信號頻率,LED顯示器指示系統(tǒng)當(dāng)前的工作狀態(tài)(水位上升、下降、水平面指示等);測控模塊在脫離上位監(jiān)控計(jì)算機(jī)的狀態(tài)下,可以讀取EEPROM中的分段參數(shù),獨(dú)立實(shí)現(xiàn)正常的測控功能。
系統(tǒng)為提高抗干擾能力,增加了相應(yīng)的光電隔離電路(CAN通訊電路,按鈕/限位開關(guān)電路,脈沖輸入電路,控制信號輸出電路等)。
3 前端測控模塊軟件設(shè)計(jì)

前端測控模塊軟件的程序采用C18[5]和匯編語言混合編程,包括初始化程序、獨(dú)立測控模式和聯(lián)機(jī)測控模式三大部分。
初始化程序主要完成各端口的初始化、CAN通訊接口初始化。其中CAN通訊接口初始化包括CAN工作方式的配置,接收濾波器的設(shè)置,接收屏蔽寄存器的設(shè)置,波特率參數(shù)設(shè)置,發(fā)送優(yōu)先級和中斷允許寄存器的設(shè)置等。其流程圖如圖4所示。
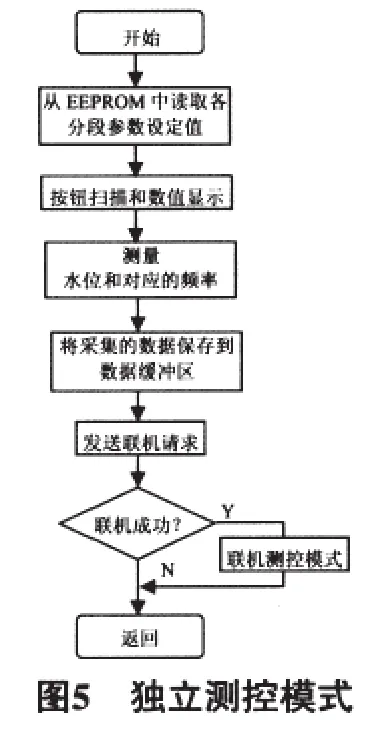
獨(dú)立測控模式主要實(shí)現(xiàn)前端測控模塊獨(dú)立運(yùn)行。當(dāng)測控模塊工作于此模式時(shí),一方面根據(jù)EEPROM中保存的設(shè)置值(上次聯(lián)機(jī)時(shí)設(shè)定的值)進(jìn)行測控,同時(shí),每次循環(huán)向上位監(jiān)控計(jì)算機(jī)發(fā)送一次聯(lián)機(jī)請求,如果聯(lián)機(jī)成功,則進(jìn)入聯(lián)機(jī)測控模式,否則,仍然工作于獨(dú)立測控模式。其流程如圖5所示。
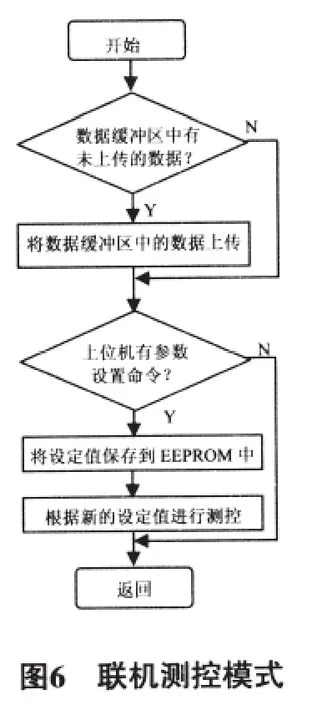
聯(lián)機(jī)測控模式除了完成獨(dú)立測控模式各項(xiàng)功能以外,還能與上位監(jiān)控計(jì)算機(jī)進(jìn)行實(shí)時(shí)通信,完成各參數(shù)的遠(yuǎn)程設(shè)定、各執(zhí)行裝置的手動(dòng)遠(yuǎn)程控制、將采集的數(shù)據(jù)上傳等工作。其流程如圖6所示。
4 上位監(jiān)控軟件設(shè)計(jì)
系統(tǒng)的上位監(jiān)控軟件采用Visual C++語言編寫而成,實(shí)現(xiàn)了完備的參數(shù)設(shè)置、顯示、查詢、報(bào)表和幫助等功能,具體有:
(1)測試畫面顯示,可顯示系統(tǒng)實(shí)時(shí)測量值,如水位值和水位傳感器輸出脈沖信號的頻率值等。
(2)水位-頻率特性曲線,根據(jù)前端測控模塊上傳的水位值和水位傳感器輸出信號的頻率值,實(shí)時(shí)繪制水位傳感器的水位-頻率特性曲線。
(3)查詢報(bào)表,可通過查詢得出特定傳感器的測試參數(shù),并繪制相應(yīng)的水位-頻率特性曲線,生成打印報(bào)表。
(4)參數(shù)修改、口令設(shè)置及幫助等功能。
5 結(jié)束語
將傳感器技術(shù)和CAN現(xiàn)場總線技術(shù)應(yīng)用于水位傳感器檢測系統(tǒng),極大地提高了水位傳感器檢測的可靠性和工作效率。本系統(tǒng)成功開發(fā)以來, 已先后在多家為洗衣機(jī)生產(chǎn)廠家配套的水位傳感器生產(chǎn)廠家投入使用,系統(tǒng)穩(wěn)定可靠,經(jīng)濟(jì)效益十分明顯,同時(shí),因其操作簡單、測試效率高,測試數(shù)據(jù)精確等特點(diǎn),受到用戶的普遍好評。
本系統(tǒng)創(chuàng)新點(diǎn):(1)本系統(tǒng)首次將傳感器技術(shù)以及CAN現(xiàn)場總線技術(shù)應(yīng)用于水位傳感器的質(zhì)量檢測, 實(shí)現(xiàn)了水位傳感器質(zhì)量檢測的自動(dòng)化,代替了原來工人既費(fèi)力又費(fèi)時(shí)的純手動(dòng)操作, 既提高了測量精度,又提高了生產(chǎn)效率;(2)巧妙地利用細(xì)鋼管在水箱中的上下移動(dòng)來模擬水位的變化, 而不是真正改變水箱中的水位;(3)系統(tǒng)采用了CAN現(xiàn)場總線進(jìn)行通訊,很容易進(jìn)行擴(kuò)展,從而實(shí)現(xiàn)水位傳感器測控系統(tǒng)的FCS[6](Fieldbus Control System)化。
[1] 雙維.傳感器技術(shù)[M].北京:中國計(jì)量出版社,2005.
[2] Ramon Pallas-Areny John G.Webster.傳感器和信號調(diào)節(jié)(第2版)[M].北京:清華大學(xué)出版社,2003.
[3] 饒運(yùn)濤.現(xiàn)場總線CAN原理與應(yīng)用技術(shù)[M].北京:北京航空航天大學(xué)出版社,2003.
[4] 劉和平.PIC18Fxxx單片機(jī)原理及接口程序設(shè)計(jì)[M].北京:北京航空航天大學(xué)出版社,2004.
[5] Microchip.MPLAB? C18 C COMPILER LIBRARIES [Microchip Data Sheet][Z].2003:21-77.
[6] 李正軍.現(xiàn)場總線及其應(yīng)用技術(shù)[M].北京:機(jī)械工業(yè)出版社,2005.
Precise Test System for Water Position Sensor
XU Dong-yin
(Jiangsu Animal Husbandry&Veterinary College, Taizhou Jiangsu 225300, China)
This paper analyzes the status and problems existing in the test system of water position sensor, precise test system of water position sensor is developed by using CAN(Controller Area Network) bus. CAN FieldBus is adopted in the communication between the host computer and monitoring modules. Because of the realizing of the redundancy system, this system has advantages of safety, reliability, perfect function, convenience operation and high price performance. The automation technology in course of testing water position sensor is greatly improved and remarkable economy bene f t is gained.
sensor; redundancy system; FCS(Fieldbus Control System); CAN(Controller Area Network)
TP273
A
1671-0142(2010)01-0014-03
徐冬寅(1974-),男,江蘇泰州人,講師,碩士在讀,研究方向?yàn)橛?jì)算機(jī)應(yīng)用.
(責(zé)任編輯 劉 紅)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
